电力牵引货运列车节能运行研究(一):目标速度曲线优化
2016-05-08贾利民卢少锋李卓玥
杨 杰,贾利民,卢少锋,李卓玥
(1.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;2.江西理工大学 电气工程与自动化学院,江西 赣州 341000;3.西交利物浦大学 电气与电子工程系,江苏 苏州 215123)
货运铁路作为我国交通运输体系的重要组成部分,具有运量大、成本低、污染小、连续性强的特点,对国民经济发展起着重要的基础性、支撑性和服务性的作用。目前,我国铁路运输总里程已经突破12万km。轨道交通在带来便捷、高效运输服务的同时,也带来了巨大的能源消耗。2014年我国国家铁路能源消耗折算标准煤高达1 653万t[1]。在能源、交通拥堵、空气污染备受关注的今天,大力发展铁路货运及其节能运行越来越重要。
列车节能运行控制是典型的非线性、多约束、多目标的复杂时变过程,可分为控制目标速度曲线优化和目标速度跟踪控制两大环节。其中,目标速度曲线是控制系统跟踪的对象,其动态优化涉及能耗机理建模、运动学分析、智能优化等内容。目标速度跟踪控制主要是针对列车运行控制的时滞性、非线性和干扰的随机性,设计安全稳定性好、鲁棒性强、自适应范围大的智能控制系统。该领域国内外相关研究所采用的方法树状图如图1所示。

图1 列车节能运行控制国内外研究方法树状图
Sidelnikov最早提出了运用动态规划方法求解水平轨道无限速条件下的列车运行模型[2]。1982年,南澳大学在Milroy的倡导下成立了交通控制小组SCG(Scheduling and Control Group),30多年来,该团队的Howlett、程家兴、Benjamin、Pudney、Xuan、Albrecht等专家与学者基于极大值原理证明了加速、匀速、惰行、制动模态的存在,并基于理想的平直道给出了惰行-制动模态切换点的速度值与匀速模态速度值之间的数学关系[3-8]。
目标速度曲线优化领域单篇引用率最高的两篇文章分别来自Khmelnitsky[9]和Rongfang Liu & Golovitcher[10],两篇文章都是基于极大值原理解决任意坡道、任意限速变化、运行阻力与列车所处位置有关的问题。文献[9]以动能为变量建立节能操纵模型,提出了数值求解算法。该方法基于极大值原理确定最优速度曲线应该包含的基本模态,通过对匀速值的迭代来唯一确定速度曲线。该方法的难度在于如何才能快速找准匀速值或拉格朗日乘子。文献[10]通过构建共轭方程和互补松弛条件方程来帮助分析Hamiltonian方程。作者详细归纳了不同控制模态出现的条件,分析了各种限速突变的场景,探讨了控制模态的转换条件,提出了模态转换点的数值求解方法。但作者提出了当列车处于陡下坡时为了维持速度恒定而存在部分制动(Partial Braking)模态,本文并不赞同。因为即使在陡下坡出现列车重力在下坡方向上的分量大于运行阻力的情况时,也可以通过提前惰行而保持整个区段的通过时间相对稳定,充分利用了列车势能,减少了牵引时间,节约能耗。
文献[11,12]针对列车节能运行中的制动能量回馈与管理问题,用动态规划和非线性优化等方法来搜索列车运行状态点背后的能耗信息,求解能源管理的优化策略,并对多种列车速度曲线优化算法进行了对比分析,同时建议运用复合算法来提高系统的鲁棒性。文献[13]用非线性约束下的运动方程对列车运行过程进行描述,将极大值与司机驾驶经验相结合,对由牵引力积分构建的能耗目标函数进行模型求解。在再生制动受到越来越多关注的背景下,文献[14,15]系统研究了电机能量转换效率、接触网馈电损耗、车载超级电容能量存储等问题,以系统的电流和电压为变量,利用梯度下降法和逐步二次规划对理想平直道上的列车节能运行进行速度曲线优化研究。迭代算法可以在数学模型的基础上以迭代的方式进行仿真与搜索计算,该方法具有比较理想的计算效率。但在较为复杂的工程应用背景下,往往需要以工程化的方式对问题进行简化处理,这些简化也势必会影响计算的精度。
当限速、坡道等约束条件比较复杂,传统的最优控制理论不适用的时候,许多学者采用了智能计算对可行操纵策略进行搜索。文献[16]针对列车的最佳惰行问题,综合考虑列车的正点性、舒适性、节能性,采用遗传算法来进行多目标寻优,在列车发车前得到惰行控制表。文献[17]在深入研究不同遗传算法特性的基础上,采用常规的遗传算法来搜索地铁列车单个惰行点的最优方案,运用分层遗传算法解决具有多个惰行点的惰行策略优化问题。文献[18,19]综合运用了遗传算法和粒子群算法的搜索功能,以及模糊逻辑对目标特性的合理描述,对高速列车的列车时刻表优化和节能驾驶统筹考虑,以模糊线性规划对时刻表优化及司机的响应进行建模,以遗传算法进行方案寻优。遗传算法不需要对约束条件和优化对象进行精确的数学建模,但搜索的随机性大,最优性无法保证,在搜索精度要求较高的时候计算量会很大。更重要的是,运用遗传算法得到的运行方案往往控制级位变化频率和幅度都较大,而列车操纵则要求控制手柄位的变化要尽可能的小,以保证列车的运行平稳,降低列车机械、电气系统的损耗。
文献[20-22]对列车节能运行以及与运行图联合优化等进行了研究。
1 问题描述
现有研究成果显示,列车节能运行包括如图2所示的最大加速、匀速、惰行、最大制动四个模态[5]。围绕这四个模态对其切换点的求解,特别是惰行模态的起始点与结束点的关系,国内外学者进行了大量卓有成效的研究工作。

图2 四阶段理论示意图
对于理想的平直道,问题的关键在于准确地找到两个速度值:一是匀速模态的速度值Vh,二是惰行模态向制动模态切换的制动起始点的速度值Vb。根据计划运行时分和运行距离,采用匀速值-制动点的二维穷举法可以求出理想平直道的最优目标速度曲线。固定运行时分下,不同Vh与Vb的速度曲线对比如图3所示。
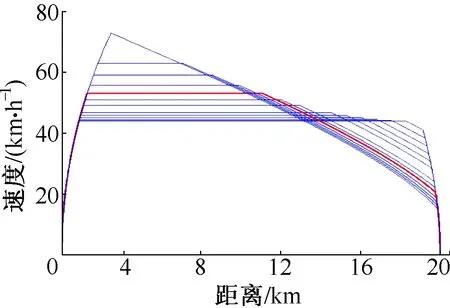
图3 理想平直道上基于Vh-Vb二维穷举策略示意图
二维穷举法虽然能够比较出能耗最低的目标速度曲线,如图3中的红色曲线,但是运算量较大,在实际线路条件下难以适用。目前比较常用的方法是运用最优控制、演化算法以及一些混合智能算法来寻求速度曲线或者部分区间的满意解。
以极大值原理为典型代表的最优控制方法是建立在精确的数学模型基础之上的。而现有模型误差范围较大,且存在一定的未建模动态,对于各种复杂的约束条件也不能很好地处理。基于智能计算的优化方法对模型的依赖性比较低,靠大规模的搜索与比较寻找可行解,且通过程序设计比较容易处理各种约束条件。但该类方法往往存在计算量与计算精度之间的矛盾。同时,控制策略的工程可行性要求控制级位变化频率不宜太高,变化幅度不能太大,且要考虑电气、机械系统的响应时间。况且,我国铁路交路长、机车型号多、线路复杂、行车密度大,国外已有的节能运行控制系统难以适应中国复杂的路网环境。
本文结合我国铁路行业的特殊背景,聚焦货运列车节能操纵的基础理论,旨在突破工程角度最优的目标速度曲线优化核心算法,完善列车节能运行控制相关理论,为实现货运列车的运行控制,从以司机为主的半自动模式转向以机器为主的全过程智能控制模式奠定理论基础。
2 全要素能耗机理集总模型
受研究方法的限制,现有研究在对列车节能运行进行建模时通常只对列车运动方程和主要的运行约束进行建模,本文采用迭代法展开设计,比较容易处理各种复杂约束。因此,本文将系统介绍所用到的模型。其中,有些部分难免会与已有文献类似,稍显拖沓冗长,但本着严谨细致的原则,本文逐一整理列出。
设独立变量t∈[0,T]⊆R,状态变量x=x(t)∈[0,S]⊆R,v=v(x)∈[0,V]⊆R满足方程
( 1 )
( 2 )
式中:t为时间;x为位移;v为速度。(x,v)∈[0,S]×(0,V]⊆R2。以电力机车为例,控制级位可视为连续可调的,即u∈U⊆[-q,p]⊆R,p和q是最大牵引和制动控制级位。

( 3 )
在不考虑再生制动时,牵引能耗函数f:[-q,p]⊆R为u∈[0,p]区间的连续单调增函数,[-q,0]内f(u)=0。当考虑再生制动时,f在整个[-q,p]区间单调递增,且f(0)=0。
2.1 列车运行受力分析
列车在运行过程中受力比较复杂,总体来看,主要是机车牵引力f、制动力b0和运行阻力w。牵引力f和制动力b0不同时出现。运行阻力w又分为基本阻力w0和附加阻力wj。wj又可分为坡道附加阻力ij、曲线附加阻力wr和隧道空气附加阻力ws。
列车运行基本阻力可以描述为
ω0=ρa+ρb·v+ρc·v2
( 4 )
式中:ρa为基准阻力参数;ρb为滚动阻力参数;ρc为空气阻力参数。
列车运行附加阻力可以描述为
( 5 )
式中:ij为列车的坡道附加阻力;α为曲线中心角;Lc为列车长度;Ls为隧道长度;ρr和ρt分别为弯道和隧道阻力参数。
制动力:电力机车常用的制动方式可以分为空气制动、电力制动和联合制动。电力制动可以参考机车制动特性图进行拟合、插值。采用空气制动时的制动力可以描述为

( 6 )
式中:Kb为换算闸瓦压力;ϑh为换算制动系数;M为总质量;φh为换算摩擦系数;ϑhc为常用制动换算制动率,ϑhc=ϑh·βc,βc为常用制动系数。
2.2 列车运动方程分析
理想状态下单质点列车运动方程可以简单离散化描述为
ci=f(vi,ui)-ω0(vi)-b0(vi,ui)-ωij
( 7 )
式中:ci为时间步长i内列车所受到的合力;vi为列车的运行速度;ui为此时的控制级位。
2.3 运行约束分析
安全性约束:列车在起动和制动过程中的安全性主要取决于列车起动加速度的大小及其变化率,加速度或其斜率过大必然导致列车纵向冲动过大,引起断钩、运输物资的损坏等。
精确性约束:列车的正点性体现了列车通过区间所耗费的时间对运行图的满足程度。准确停车体现列车位移对运行距离的满足程度。
动、静态限速:动、静态限速可以描述为
0≤vi≤vlim
( 8 )
( 9 )

(10)

除了上述约束外,列车运行还会受到环境状况、天气条件、列车状态等方面因素的影响,包括风速、雨雪天气、气温、线路信号制式、黏着系数、轨道平顺度、牵引定数、编组方式,以及不同列车之间机车牵引特性、基准阻力参数、滚动阻力参数、空气阻力参数、换算摩擦系数、电机效率等参数的不一致性等。限于篇幅,本文暂不作讨论。
2.4 先验知识分析
此处,先验知识指的是一些业内具有共识的重要理论基础和司机人工驾驶所形成的经验知识。优秀司机的驾驶与决策行为(即人类智能)有许多值得机器智能研究学习与效仿的地方。例如,《铁路机车操作规则》中关于司机驾驶的“起车稳、加速快、防止空转”等原则。还比如司机在发车前对行程的规划,是先从宏观上大致预估途中运行的匀速值,再考虑线路条件等细节信息进行调整。这些都是本文算法设计中有所借鉴的先验知识。
另外,SCG最重要的成果之一是给出了在不考虑再生制动的情况下,列车最优惰行的数学模型。
(11)
式中:ψ(v)=v2r′(v),φ(v)=v·r(v),r(v)=a+b·v+c·v2。有了这个模型,图3所示的理想平直道的问题只要找到恰当的Vh即可唯一对应一条满足时间约束的、包含了最大加速、匀速、惰行、制动四个模态的最优速度曲线。这个理想化的最优速度曲线正是我们求解复杂条件下目标速度曲线的基础。
2.5 四种模态下的能耗计算模型
2.5.1 牵引模态
新型电力机车的牵引系统经过设计,除了速度极低的情况以外,电机效率基本恒定。因此,在第i个时间步长内列车牵引力做功可以表示为
(12)
(13)
2.5.2 匀速模态
在列车运行过程中尽量保持匀速行驶是一种被广泛认可的节能驾驶策略。同时,匀速模态是牵引、惰行及制动模态的纽带。新型电力机车的逆变系统采用了VVVF技术,理论上车速和牵引力连续可调。在匀速模态下有
fh(vi,ui)=ω0(vi)+ωj
(14)
2.5.3 惰行模态
列车在惰行模态下牵引系统和制动系统均不做功,列车靠惯性滑行。其间,列车动能克服阻力做功。合理地运用惰行可以有效减少牵引力做功。但过多地在低速段采用惰行则会浪费宝贵的运行时分,从而导致全局总能耗的增加。
eci=fc(vi,ui)=0
(15)
2.5.4 制动模态
如前文所述,列车的制动方式分空气制动、电力制动和联合制动等多种类型。新型电力机车均能够采用再生制动的方式将动能转化为电能回馈电网。再生制动时的制动力需要按照前文所述的制动特性计算。再生制动的能量回馈可以表示为
eri=pr·fbr(vi,ui)·vi·Δt
(16)
式中:pr为再生制动的能量再生率(向电网回馈的制动发电量与列车动能损失量之间的比例)。
3 能耗敏感度分析
3.1 计划运行时分对运行能耗的影响
对于给定的区间距离,计划运行时分不同,则相应的运行策略和速度曲线是不同的。图4为20 km理想平直道上,不同计划运行时分所对应的最优速度曲线簇。其中,匀速值Vh与制动起始点速度值Vb的关系按照式(11)进行约束。

图4 不同计划运行时分的等距离速度曲线簇
算例1简要步骤
步骤1根据给定的区间距离,求解节能运行最短运行时分及其对应的速度曲线,即匀速运行距离为0,列车由加速模态直接转入惰行模态。
步骤2将计划运行时分以100 s为步长递增,直到Vh不再明显变化为止。
步骤3汇总显示各步骤的速度曲线。
同样,对于给定的区间距离,计划运行时分不同,则相应的运行能耗也是不同的。对图4所示的速度曲线簇重新以1 s为步长递增,进行能耗计算。图5为相应的计划运行时分-能耗关系图。其中,能耗计算按照式(12)~式(16)计算,且暂时不计入再生制动的能量回馈。

图5 固定线路条件下计划运行时分-能耗关系图
3.2 惰行点对能耗的影响
如前文所述,理想条件下列车节能运行的最优惰行关系是可以求解的。而利用仿真分析的方法可以更为直观地展现不同惰行策略对能耗值的影响。图6为20 km理想平直道上,计划运行时分为2 400 s所对应的惰行-能耗关系图。与3.1节相同,暂时不计入再生制动的能量回馈。

图6 非再生制动情况下惰行点对能耗的影响
算例2.1简要步骤
步骤1根据给定的区间距离,按式(11)给出的最优惰行关系,求解匀速模态速度值Vh和Vb。
步骤2设pcb=0,按照式(17)计算Vb′,将Vb′作为惰行起始速度进行速度曲线仿真,并计算相应的能耗值。
Vb′=Vh-pcb(Vh-Vb)
(17)
步骤3将pcb以1%为步长递增,直到Vb′=0(即一直惰行到速度为0)。
步骤4汇总显示各步骤的能耗值。
由步骤2可知,当pcb=100%时Vb′=Vb,即符合式(11)的最优惰行关系,全局能耗最低。这在图6中也得到了印证。同时,在95%≤pcb≤105%的区段内,各点能耗值是极其接近的(特别是在98%≤pcb≤102%的区段内,能耗值是完全相同的),本文将95%≤pcb≤105%称为最优切换区域。
算例2.2
在算例2.1中未计入再生制动的能量回馈。即图6是pr=0的特例。下面将pr以0.1为步长进行递增,可以得到如图7所示的二维曲线簇,该二维曲线簇反映了再生率对最优惰行点的影响。

图7 不同再生率情况下惰行点对能耗的影响
由图7可以发现,随着再生率的增加,提前进入制动模态可以产生一部分能量回馈,从而使得最优惰行关系发生变化,即减少惰行模态的范围,惰行-制动模态切换点的速度值提高。同时,最优惰行关系的变化随再生率的增加呈现一定的规律性,可以进行近似线性化。线性化后的最优惰行点为
Vb″=Vh-(1-0.4·Pr)·(Vh-Vb)
(18)
最优切换区段的宽度为
Δpcb=±(5+5·Pr)
(19)
3.3 能耗敏感度对比分析
通过对3.1节、3.2节的对比分析可以发现如下特征:
(1)以图7中pr=0.5对应的能耗曲线为例,在曲线的谷底区段,能耗值是非常接近的,在80%≤pcb≤90%的区段内能耗变化小于0.5 kW·h,不足能耗总量0.06%。特别是在84%≤pcb≤88%的区段内,能耗值基本上是完全相等的。
(2)在1 600~1 800 s之间,运行能耗的差值约为50 kW·h,相当于运行时间每增加1 s,能耗可以减少0.25 kW·h。
(3)由前两条可以发现,对于运行时间的控制是速度曲线优化的关键。优化过程中,在保证充分利用计划运行时分的前提下,惰行-制动切换点可以根据机车机械系统、电子系统的响应时间、优化计算的运算代价等情况,在最优切换区段内灵活调整。
最优切换区段:为了便于程序对运行时间的精确控制,将能耗曲线的谷底区段以能耗最低点为中心,用隶属函数按照一定的隶属度筛选出的能耗最接近最小值的区段称为最优切换区段。例如图7中近似线性化后的最优切换区段隶属度为99.94%。
4 目标速度曲线优化
基于前文中所述的数学模型和能耗敏感度的分析,本文提出一种新的目标速度曲线优化方法,如图8所示。首先,基于理想平直道介绍模态切换点和匀速值Vh的求解;其次,针对含缓坡的线路证明匀速运行的最优性,论证其模态切换点的求解;最后,针对含陡坡的线路介绍基于等效匀速法的速度曲线优化方法。

图8 标速度曲线优化整体思路
4.1 平直道
平直道上列车的最优运行策略已经被证明存在且唯一存在[3,5],但该方法十分复杂。下面,本文仅针对平直道来简化文献[5]对最优惰行关系的证明。
引入协态变量构建Hamiltonian函数
H(x,v,α,β,u)=-f(u)+αv+βF(x,v,u)
(20)
按照文献[5]可以得到
(21)
设常数A满足
(22)
(23)
对于平直道(g(x)=0),将式(22)代入Hamiltonian函数有

(24)
伴随方程为
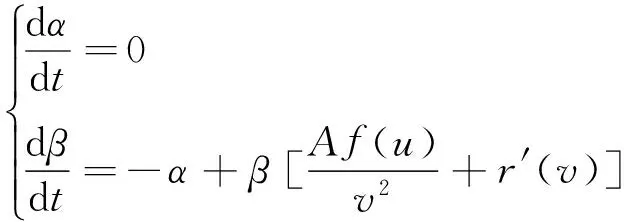
(25)
将Hamiltonian函数转化为
(26)
由Pontryagin极大值原理可知,只有在能够保证Hamiltonian函数取极大值,控制策略才是最优策略。将上式分为五种情况进行讨论。

(27)
因此,工况转换的链接条件是
v=Aβ
(28)
此时列车处于匀速运行模态,牵引力等于运行阻力。结合式(25)和式(27),对等式两边进行求导后可得
(29)
式中:φ(v)=v·r(v)。
同时,由式(25)也可以得到α等于某常量C。所以有
φ′(v)=A·α=A·C
(30)
因φ(v)在有效区间内是凸函数,则在匀速运行时(v=Vh)有
(31)
因为Hamiltonian函数在最优策略中应是常数,即μ=H(t)。将式(28)和式(29)代入式(24)有
(32)
其中,ψ(v)=v2r′(v)。
假设列车的惰行运行区间为t∈[a,b],即列车从a点以Vh=v(a)开始惰行,直到b点以Vb=v(b)开始制动,且g(x)=0,则有D(a,b)=0。由式(21)可得
(33)
对a,b两点的Hamiltonian函数值进行计算,由式(29)、式(32)可得

(34)
所以可得匀速区间速度值Vh与制动点速度值Vb的关系为
(35)
将式(32)代入式(35),则式(11)得证。
如本文第1章“问题描述”中所述,有了式(11),对于给定的计划运行时分和区间距离,按照最大加速、匀速、惰行、制动的模态顺序,则可以唯一确定匀速模态速度值Vh,从而确定理想平直道上最优速度曲线,如图3中红色曲线所示。
确定Vh值的方法可以用积分计算的方法,也可以用迭代的方法。积分计算的方法计算效率较高,但仅适用于简单线路,本文采用迭代法进行搜索。简要步骤如下:
步骤1设初始速度Vh0=S/T,以1 km/h为步长递增,按加速、匀速、惰行、制动的模态顺序绘制速度曲线。
步骤2判断步骤1中的速度曲线所耗计划运行时分是否大于S,是则跳出,否则返回步骤1。
步骤3退回跳出前的Vhi,将递增步长改为0.1 km/h,重复上述循环。
步骤4退回跳出前的Vhii,将递增步长改为0.01 km/h,重复上述循环。
步骤5退回跳出前的Vhiii,将递增步长改为0.001 km/h,重复上述循环。
步骤6程序跳出,输出Vh=Vhiii。
上述方法输出的Vh在数学上并不是绝对的精确,但对于实际的轨道交通系统,该精度已经足以满足硬件系统对精度的需要,且计算速度较快。该方法还可以无限细化,满足更高的精度需要。
4.2 含缓坡的线路
本文中所谓的陡坡包含陡上坡和陡下坡。陡上坡是指列车在特定的线路条件和运行速度下,运行阻力大于机车最大牵引力的上坡区段;陡下坡是指重力在下坡方向的分量大于列车运行基本阻力,即使列车采用惰行也会出现速度上升的下坡区段。相应地,缓坡则是指坡度值介于陡上坡和陡下坡之间,列车通过调节机车牵引力既可以保持匀速运行的坡道区段。
4.2.1 缓坡区段匀速运行的最优性
假设有等重量的列车1和2,分别以相同的速度运行在线路1和线路2上。若列车1匀速通过缓坡区段AB时,列车2匀速通过等距离的平直区段A′B′,线路1和线路2在其他区段的线路条件和列车运行状况均完全相同,示意图如图9所示。

图9 平直道与缓坡区段对比示意图
对列车1和列车2的运行能耗分别进行计算有
E1=F1(x)·(x2-x1)=(ω0+ωj)·(x2-x1)
(36)
E2=F2(x)·(x2-x1)=(ω0)·(x2-x1)
(37)
因为两列列车的重量和运行速度均相同,所以基本阻力是完全相同的。况且新型电力机车的驱动系统经过特殊设计,除速度极低的工况以外,系统效率是基本稳定的,所以有
ΔE=E1-E2=ωj·(x2-x1)=MgΔh
(38)
而对于具有海拔高度差的两点,ΔE=MgΔh是克服重力做功的值,也是列车1和列车2运行能耗差值的最小值。那么,既然列车2在平直道上匀速运行是最优的运行策略,所以列车1在缓坡区段匀速运行也是最优运行策略。
4.2.2 含有缓坡线路模态切换点的确定
与4.2.1同理,对含有缓坡区段的线路,若采用与平直道完全相同的开行方案(含加速、匀速、惰行及制动在内的全部操纵序列),则运行能耗差值为ΔE=MgΔh,即运行能耗差值的最小值。所以,对于驱动系统效率相对稳定的电力机车,在含有缓坡区段的线路上的最优匀速点、惰行点、制动点的求解与平直道完全相同。
综上所述,对含有缓坡的线路,保持与图3中红色曲线相同特征的速度曲线仍是最优速度曲线。
4.3 含陡坡和限速变化的线路
4.3.1 最短运行时间速度曲线
最短运行时间速度曲线是列车在特定线路环境下按最短运行时分策略运行所能达到的运行速度曲线,是给定条件下列车实际运行的速度上限。最短运行时间速度曲线在无限速的情况下含有加速、制动两个模态;在有限速的情况下含有加速、匀速、制动三个模态,如图10所示。在策略优化过程中以此作为策略优化的上边界条件可以有效筛除无效控制级位,简化计算。对应的运行时间是该车在该线路条件下的最短运行时分。计划运行时分大于最短运行时分是轨道交通系统运行图编制的基本原则,更是列车节能运行的基本前提。

图10 最短运行时间速度曲线示意图
值得一提的是对于限速比较复杂的线路条件,往往会在低限速区段的起始点,即由惰行转入匀速模态的切换点存在速度误差(裕量)与计算速度的矛盾关系。本文提出了双向迭代的方法,可以有效消除速度误差。
双向迭代法简要步骤如下:
步骤1正向迭代,直到低限速区段的起始点。
步骤2从低限速区段的起点反向迭代,递推上一步长的理想速度,直到与正向迭代速度曲线交叉。
步骤3交叉点即为模态切换点,交叉点之前的速度曲线以正向迭代的为准,交叉点之后的速度曲线以反向迭代的速度曲线为准。
4.3.2 速度基线
速度基线是根据运行图给定的运行时间和距离对行程做出的宏观时间、速度配置方案。该方案暂时不考虑具体线路细节和机车牵引力范围,仅按理想平直道确定匀速模态下的速度值和各个模态转换点的速度值,作为运行时间按距离分配的宏观原则。本文初步设计了单质点列车速度基线规划算法,示意图如图11中虚线所示。

图11 速度基线示意图
4.3.3 陡坡区段的处理
速度基线在绝大部分情况下是比较理想的运行策略。但是,如图11中8~10 km处的陡上坡区段,坡道附加阻力较大,即使列车采用最大牵引力也无法维持匀速运行。本文将采用平均速度等效的方法对该类陡坡区间进行处理。
平均速度等效法:如图12所示,图形下方的红线表示轨道的海拔高度,中间的斜坡代表轨道的坡度。策略求解的上下边界:绿线(速度)中间曲线段上方的虚线表示在过了坡以后速度刚好降到匀速值的策略上界;下方的虚线表示策略下界,即完全不采用动能闯坡,仅依靠机车最大牵引力回到坡前速度。平均速度等效法从策略下界出发,以变步长法向上界方向递推,直到满足式(39),即从坡前加速点p到恢复匀速模态点h所消耗的运行时间等于匀速通过该区段所消耗的时间。在运行距离与运行时间的关系方面达到等效匀速的效果。
(39)
式中:xh表示匀速点h的位置坐标;xp表示加速点p的位置坐标;th表示列车通过匀速点h的时刻;tp表示列车通过加速点p的时刻。
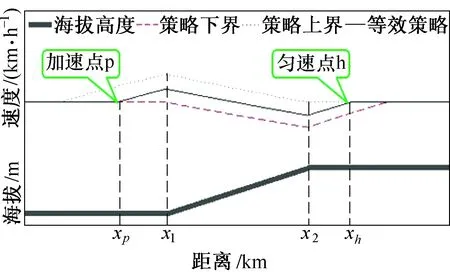
图12 平均速度等效法运行策略求解示意图(陡上坡)
图12中介于策略上界与策略下界之间的黑色实线即为平均速度等效速度曲线。
同理,在陡下坡区段,重力除了克服阻力外,会使列车出现加速惰行的情况。此时需要找到满足式(39)的提前惰行起始点,即达到等效匀速通过该区段的效果。
算例3用上述方法对某含有缓上坡、缓下坡、陡上坡和陡下坡的实验线路进行速度曲线全局优化,结果如图13所示。

图13 基于平均速度等效法的运行策略寻优仿真
该算法使得区段耗时等效于匀速通过该区段所需要的时间,在给定的时间约束下,按照方差最小的原理,速度波动越小,式( 4 )中二次方项的值最小,阻力做功也就最小。通过软件仿真可以证实,平均速度等效法可以使得全局能耗值处于能耗谷底的最低区域。更重要的是,区间耗时的固定使得全局优化不需要调整时间配置和Vh值,为全局优化带来了便利,提高了计算效率。图13在普通台式办公电脑的Matlab 2012运行环境下仅需要大约3 s即可完成仿真计算。
5 对比分析
对于图13中的相同线路条件,本文采用德国汉诺威大学的专业仿真软件Dynamis 2.0进行对比仿真,结果如图14所示。
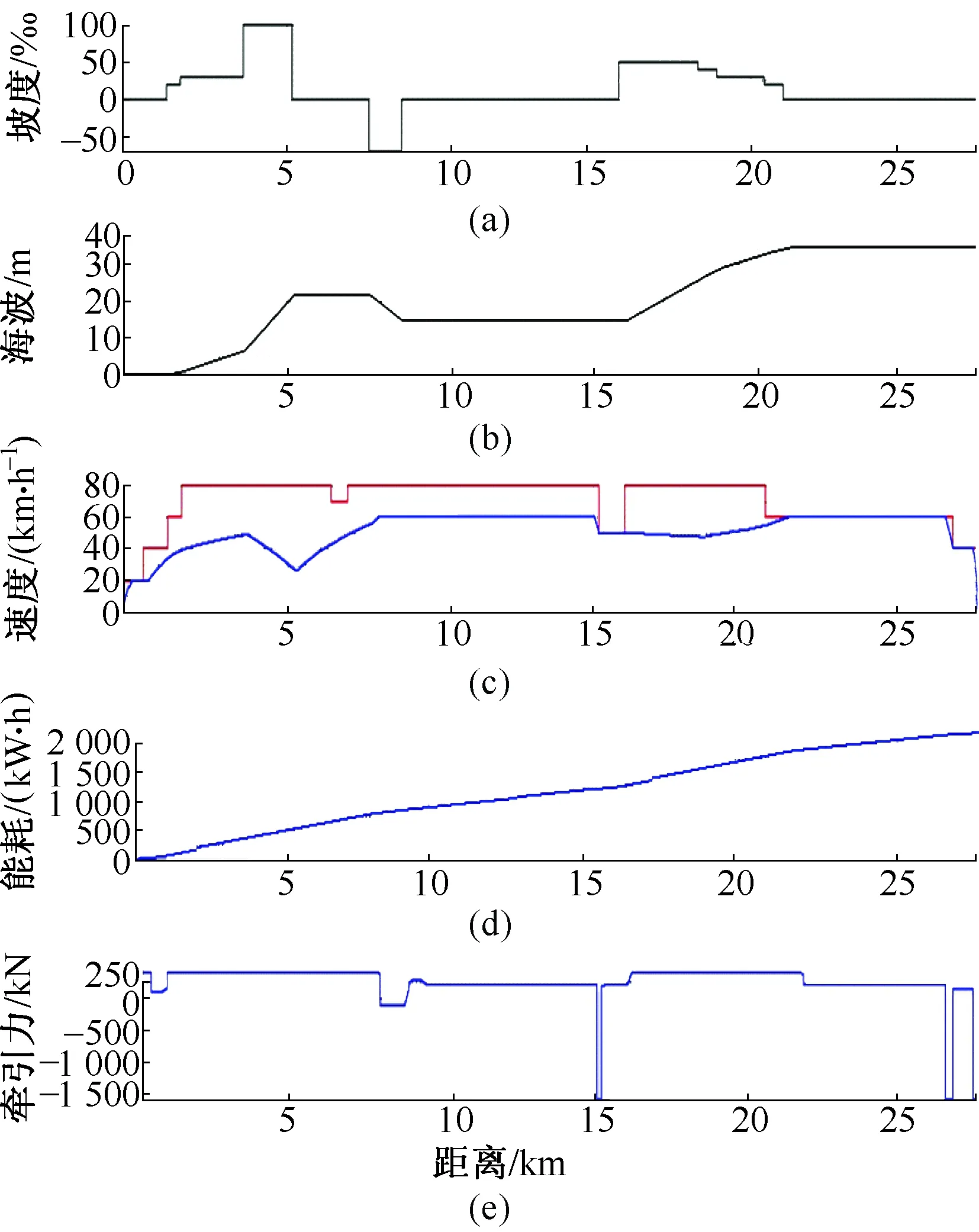
图14 采用Dynamis2.0软件进行的对比仿真
由图14可知,在15 km和26.7 km处出现了最大制动力制动。按照节能运行的常识可知,列车通常只有在以停车为目的的低速状态下才会使用制动。图13给出的策略更加合理。
算例4本文提出的算法经过稍加调整,加入舒适性约束后,可以移植到城轨列车的速度曲线优化中。
图15为算法调整后与文献[11,12]中采用的GA、DP、PSO三种算法进行对比分析的仿真效果。

图15 对比仿真效果图
从上述仿真结果进行对比可以看出,城轨列车的线路条件相对更为简单,优化起来也相对比较容易。图15(d)中针对150 min、175 min、200 min、225 min、250 min五种计划运行时分分别绘制了相应的速度曲线。该方法能够灵活适应各种限速、坡道、弯道、隧道,在中间运行区段不存在演化算法方法难以避免的速度随机波动的情况,尽可能多地保持了匀速运行,仅在停车前使用了制动。列车仅需在模态切换点调整控制级位,相邻两次控制级位调整之间间隔较长,为电气、机械系统的执行响应提供了充裕的时间,也为控制系统跟踪目标曲线留足了牵引力平滑调整裕量,有效保障了算法的工程可行性。
6 结论与展望
本文围绕以电力机车牵引的货运列车的节能运行,针对控制目标速度曲线优化算法的工程应用瓶颈,从平直道的运行策略切入控制目标速度曲线优化的实质,简化了运行模态切换点的求解和证明过程;证明了在含有缓坡线路条件下的最优策略与平直道相同;简要介绍了针对陡坡区段的平均速度等效优化算法,并在Matlab软件环境下进行了算法仿真验证。本文所述方法将数学推导、先验知识、逻辑分析充分结合,迭代仿真可以有效处理各种复杂线路条件及运行约束,算法对于列车电气、机械系统的响应特性能够予以兼顾。仿真结果显示,速度曲线尽可能多地保持了匀速运行,节能效果理想,计算效率较高,为在线优化奠定了良好的基础。
参考文献:
[1]中国国家铁路局. 2014年铁道统计公报[R]. 2015.
[2]SIDELNIKOV V. Computation of Optimal Controls of a Railroad Locomotive[J]. Proceedings of State Railway Research Institute, 1965,6(2): 52-58.
[3]MILROY I P. Aspect of Automatic Train Control [D]. Loughborough: Loughborough University, 1980.
[4]HOWLETT P G, PUDNEY P J. Energy-efficient Train Control [M]. Springer-Verlag London Limited, 1995.
[5]HOWLETT P G. The Optimal Control of a Train [J]. Annals of Operations Research, 2000, 98:65-87.
[6]CHENG J X, HOWLETT P G. A Note on the Calculation of Optimal Strategies for the Minimization of Fuel Consumption in the Control of Trains [J]. IEEE Transactions on Automatic Control, 1993,38(11):1 730-1 734.
[7]WU X. Analysis of Necessary Conditions for the Optimal Control of a Train [D]. Australia: University of South Australia, 1997.
[8]ALBRECHT A R, et al. Energy-efficient Train Control: From Local Convexity to Global Optimization and Uniqueness [J]. Automatica, 2013,49(10):72-78.
[9]KHMELNITSKY E. On an Optimal Control Problem of Train Operation [J]. IEEE Transactions on Automatic Control, 2000,45(7):1 257-1 266.
[10]LIU R, et al. Energy-efficient Operation of Rail Vehicles[J]. Transportation Research Part A Policy & Practice, 2003,37(10): 917-931.
[11]LU S F. Optimising Power Management Strategies for Railway Traction Systems[D]. Birmingham: University of Birmingham, 2011.
[12]LU S F, et al. Single-Train Trajectory Optimization[J]. IEEE Transactions on Intelligent Transportation, 2013,14(2):43-50.
[13]朱金陵, 李会超, 王青元, 等. 列车节能控制的优化分析[J]. 中国铁道科学, 2008, 29(2): 104-108.
ZHU Jinling,LI Huichao,WANG Qingyuan, et al. Optimization Analysis on the Energy Saving Control for Trains [J]. China Railway Science, 2008, 29(2): 104-108.
[14]MIYATAKE M, MATSUDA K. Energy Saving Speed and Charge/discharge Control of a Railway Vehicle with On-board Energy Storage by Means of an Optimization Model [J]. IEEJ Transactions on Electrical and Electronic Engineering, 2009,4(6):771-778.
[15]MIYATAKE M, KO H. Optimization of Train Speed Profile for Minimum Energy Consumption [J]. IEEJ Transactions on Electrical and Electronic Engineering, 2010,5(5):263-269.
[16]CHANG C S, SIM S S. Optimising Train Movements Through Coast Control Using Genetic Algorithms [J]. Electric Power Applications,1997,144(1):65-73.
[17]WONG K K, HO T K. Dynamic Coast Control of Train Movement with Genetic Algorithm[J]. International Journal of Systems Science, 2004,35(13):835-846.
[18]CUCALA A P, et al. Fuzzy Optimal Schedule of High Speed Train Operation to Minimize Energy Consumption with Uncertain Delays and Driver's Behavioral [J]. Electric Power Applications, 2012,25(2): 1 548-1 557.
[19]María Domíngueza, et al. Multi Objective Particle Swarm Optimization Algorithm for the Design of Efficient ATO Speed Profiles in Metro Lines [J]. Engineering Applications of Artificial Intelligence, 2014,29(7): 43-53.
[20]JIA L M, ZHANG X D. Distributed Intelligent Railway Traffic Control: a Fuzzy-decisionmaking-based Approach[J]. Engineering Applications of Artificial Intelligence, 1994, 7(3): 311-319.
[21]丁勇,毛保华,刘海东,等. 定时约束条件下列车节能操纵的仿真算法研究[J]. 系统仿真学报,2004,16(10):2 241-2 244.
DING Yong, MAO Baohua, LIU Haidong, et al. An Algorithm for Energy-efficient Train Operation Simulation With Fixed Running Time [J]. Journal of System Simulation,2004,16(10):2 241-2 244.
[22]LI X, et al. An Energy-efficient Scheduling and Speed Control Approach for Metro Rail Operations[J]. Transportation Research Part B: Methodological,2014,64(4):73-89.
