基于模型的Buck-Boost变换器协同无源控制
2016-05-06李红梅叶帮红
李红梅 叶帮红
(合肥工业大学电气与自动化工程学院 合肥 230009)
基于模型的Buck-Boost变换器协同无源控制
李红梅 叶帮红
(合肥工业大学电气与自动化工程学院 合肥 230009)
摘要为了改善Buck-Boost变换器的动态性能和静态性能,基于无源控制实现变换器电感电流期望值的实时观测,再与协同控制相结合得出控制律,提出了协同无源控制的Buck-Boost变换器实现其高性能控制并使之兼具强鲁棒性。为了简化控制器结构,选取协同控制宏变量时未引入积分环节,易于实时实现。最后,采用基于模型设计的开发流程和自动代码生成技术,开发协同无源控制的Buck-Boost变换器样机,通过系统的仿真研究和样机的实验测试,验证该变换器的动态和静态控制性能。
关键词:Buck-Boost变换器 协同无源控制 鲁棒性 基于模型设计 自动代码生成
国家自然科学基金(51377041),安徽省教育厅重点项目(KJ2011A217)和国家大学生创新训练项目(201210359015)资助。
0 引言
Buck-Boost变换器具有结构简单、输入电压范围宽和可灵活实现升压与降压控制等优点,因此在电力电子领域得到了广泛的应用[1]。Buck-Boost变换器通常采用经典的电流内环和电压外环的双闭环PI控制,但是该系统在某些应用场合,如输入电压或负载变化较大、电路中的电子元器件参数发生改变,经典的双闭环PI控制往往无法获得满意的系统动态和静态控制性能,甚至会出现系统不稳定运行的现象,尚需寻求高性能的非线性控制策略。
对DC-DC变换器,常用的非线性控制策略有滑模控制、无源控制和协同控制等。文献[2]采用滑模控制,具有较强的鲁棒性,但此种控制不能使开关管工作在固定的频率下,输出电压稳态误差较大,对滤波器的设计要求较高。无源控制是基于能量耗散理论,对外部扰动和系统参数变化均具有较强的鲁棒性[3-5],为此,文献[6]设计了基于无源控制的DC-DC变换器,但研究表明该系统对较大范围的外部扰动,其输出电压稳态误差较大。为改善系统性能,文献[7]在无源控制的基础上,引入了滑模控制,有效抑制了电感电流的超调,但针对负载扰动,系统仍然存在较大的输出电压稳态误差。文献[8]则是将无源控制和PI控制相结合,针对外部扰动,系统虽然能够镇定到平衡点,但存在超调,且其输出电压稳态误差依然较大。
非线性控制中的协同控制,是基于定向自组织原理,按照协同控制理论设计的控制器具有较好的稳态特性和动态性能,并对参数的变化具有很强的鲁棒性[9]。以协同控制理论为基础,文献[10-13]设计了基于协同控制的Boost变换器,且对协同控制策略进行了改进,在一定程度上减小了电感电流的超调,但均是以增加控制策略复杂难度为代价,而且仍然不能明显抑制电感电流超调。为此,文献[14]引入遗传算法优化协同控制器参数,选取宏变量时包含积分环节,对于参数扰动、输入电压及负载扰动,系统虽能够镇定至平衡点,但其电感电流依然存在超调,且协同控制策略中引入积分环节,采用遗传算法优化控制器参数导致控制策略复杂,不易实时实现。
为此,针对Buck-Boost变换器,为了实现在输入电压变化、负载变化及其电路电子元器件参数发生改变条件下,系统能快速有效地被镇定至平衡点稳定运行且有效抑制电感电流的瞬态超调,论文将无源控制和协同控制相结合。首先研究Buck-Boost变换器的协同无源控制策略;再基于模型设计和自动代码生成技术[15],开发协同无源控制的Buck-Boost变换器样机;最后进行系统仿真和实验测试研究并给出结论。
1 Buck-Boost变换器的协同无源控制
Buck-Boost变换器的主电路拓扑如图1所示,假设各元器件均为理想元器件,且变换器工作于连续模式下,基于状态空间平均法,可得Buck-Boost变换器的状态平均模型为

其中
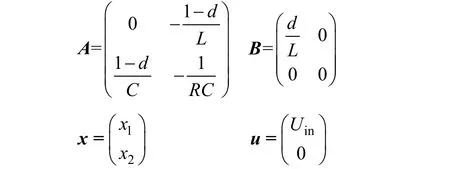
式中,x1、x2分别表示电感平均电流iL和电容平均电压uC;d代表开关管的占空比,且0≤d≤ 1;Uin表示输入电压;L、C和R分别表示变换器电感、电容和电阻。
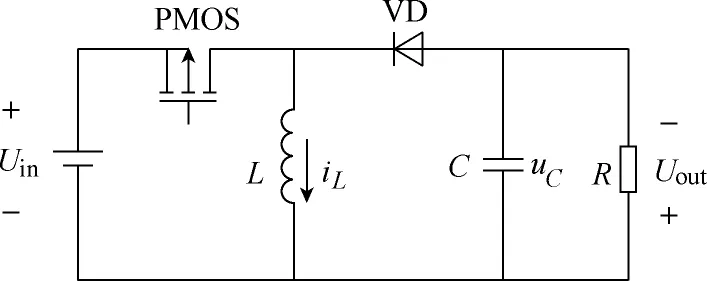
图1 Buck-Boost变换器主电路拓扑Fig.1 The main circuit topology of Buck-Boost converter
根据协同控制理论,选取系统状态轨迹向流形Ψ=0的动态演化规律

式中,T表示系统趋向流形Ψ=0的收敛速度,且T>0。
定义宏变量为

式中,k为控制参数,且k>0。
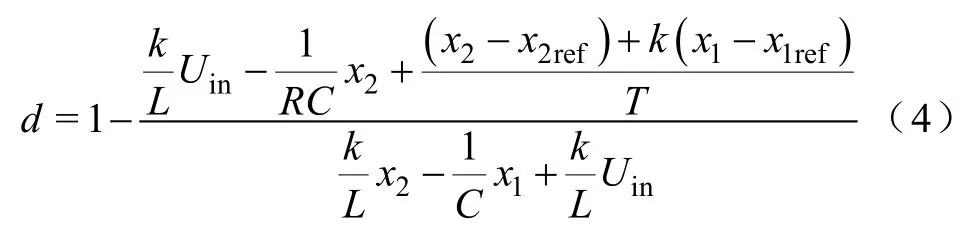
根据式(1)~式(3),获得的协同控制律为
将Buck-Boost变换器的状态平均模型式(1)改写成欧拉-拉格朗日模型[16]

其中


选取能量存储函数为

对式(6)求导可得

式(7)表明,基于协同控制的Buck-Boost变换器系统是无源的,注入合适的阻尼可实现系统输出误差渐进稳定到零点,系统状态及输出变量逐渐收到期望值。


式中

令Φ′=0,选择李雅普诺夫函数

则其关于时间的导数为

由′=0
Φ,整理式(11)右侧方程可得


联立式(4)和式(15),可得Buck-Boost变换器的协同无源控制律为

2 不同控制策略下的Buck-Boost变换器仿真
Buck-Boost变换器主电路参数为:额定输入电压Uin=12V,电感L=39.6μH,电容C=100μF,电阻R=19.5Ω,期望输出电压Uref=15V,准确度为2%,开关频率f=60kHz。
协同无源控制参数k决定了系统调整时间和超调量,增加k值,超调量减小,但系统调整时间变长。T的选择直接影响起动过程中的系统超调和系统稳态误差,当T值越大时,起动过程的超调量将减小,但系统起动时间会增加,且稳态误差增大。通过不同控制参数条件下的系统仿真对比分析与优化获得最佳控制参数为k=100,T=16.67μs。
假定负载扰动如图2a给定所示,负载扰动下Buck-Boost变换器在不同控制策略下的系统动态比较图如图2所示。电感参数扰动为t=0,L=39.6μH;t=0.1s,L=31.68μH;t=0.15s,L=39.6μH;t=0.2s,L=47.52μH;t=0.25s,L=39.6μH。电感参数扰动下Buck-Boost变换器在不同控制策略下的系统动态比较如图3所示。图2~图3中SACT统一表示基于协同控制的系统动态,SAPBCT统一表示基于协同无源控制的系统动态。
系统仿真结果表明:协同控制的Buck-Boost变换器系统,其电感电流瞬态超调明显,针对20%的负载扰动和电感参数扰动,系统稳态误差较大,准确度约26.67%;而协同无源控制的Buck-Boost变换器系统电感电流不存在瞬态超调,针对20%的负载扰动和电感参数扰动,系统均能镇定至平衡点稳定运行,且输出电压稳态误差很小,准确度约为1.33%。


图2 负载扰动下的系统动态比较Fig.2 The comparison of system dynamics under load perturbation
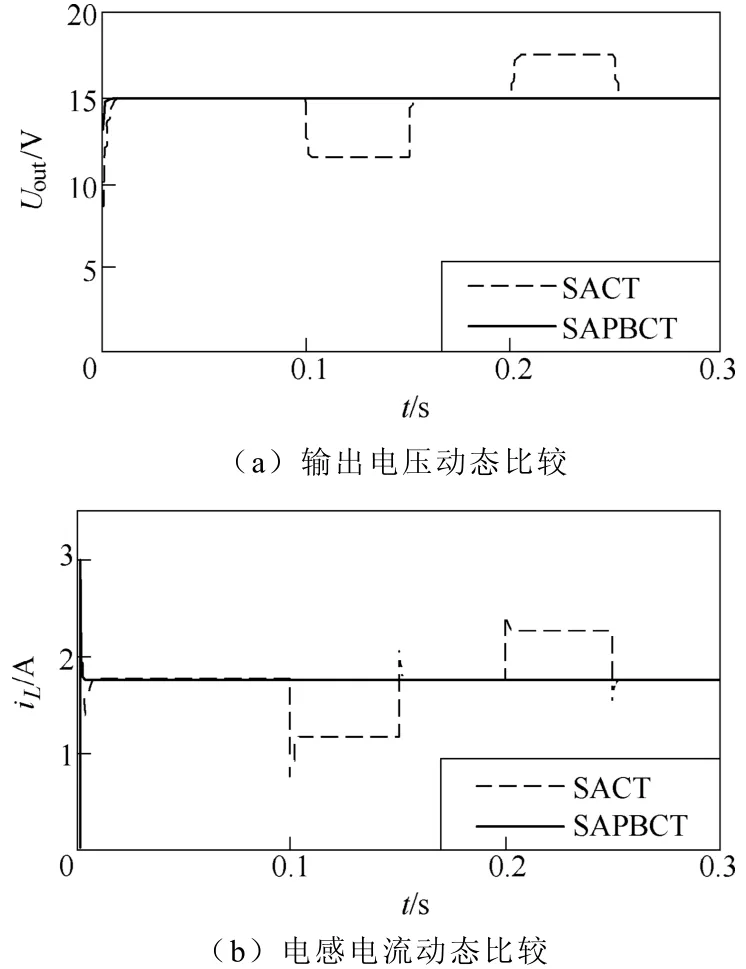
图3 电感参数扰动下系统动态比较Fig.3 The comparison of system dynamics under inductance perturbation
3 协同无源控制的Buck-Boost变换器实验研究
基于模型设计的开发流程,仅需关注核心控制算法,繁琐的代码生成工作直接由代码自动生成技术完成,不仅缩短了开发周期,降低了开发难度,而且减少了手工代码过程中的人为错误,提高了程序代码的编写效率,基于V模式开发流程框图如图4所示。

图4 基于V模式的开发流程框图Fig.4 The workflow diagram of V mode-based development process
为此,利用Mathworks公司提供的一系列工具,完成从设计理念到算法模型,再由模型自动生成C语言代码的开发流程,开发出协同无源控制的Buck-Boost实验样机,其实验原理框图和硬件电路如图5所示。实验样机中开关管选用IRF9540,数字处理芯片选用TMS320F28335,其主电路参数与系统仿真研究中的主电路参数一致。
图6为系统在20%输入电压扰动下系统仿真与实验的动态比较。由系统动态比较图可知:电源开机后,基于协同无源控制的Buck-Boost变换器的输出电压和电感电流均无瞬态超调,系统能快速镇定至平衡点稳定运行,且稳态误差很小。


图5 实验原理框图和硬件电路Fig.5 The principle diagram of experimentand hardware circuit

图6 输入电压扰动下系统动态比较Fig.6 The comparison of system dynamics under the input voltage perturbation
4 结论
为了提升Buck-Boost变换器在时变输入电压、负载扰动和元器件参数变化下的系统动态性能、稳态性能及鲁棒性,简化协同控制中宏变量选取,论文将无源控制和协同控制相结合,提出了Buck-Boost变换器的协同无源控制策略。在上述研究基础上,基于模型设计开发流程和自动代码生成技术快速有效地开发出协同无源控制的Buck-Boost变换器实验样机。系统仿真研究和实测研究结果表明:针对时变的输入电压、负载扰动和元器件参数变化,协同无源控制的Buck-Boost变换器具备较强的鲁棒性、稳态误差小,并能够有效抑制现有控制策略中存在的电感电流瞬态超调,而且结构简单,易于实时实现。可以预见,Buck-Boost变换器的协同无源控制策略及基于模型的设计思想将在电动汽车辅助电源、车载充电器等开关电源设计及其高性能控制中得到推广应用。
参考文献
[1]杨君东,李磊.Buck-Boost式三电平单级AC-AC变换器[J].电工技术学报,2010,25(2):107-113.Yang Jundong,Li Lei.A Buck-Boost mode threelevel single-stage AC-AC converter[J].Transactions of China Electrotechnical Society,2010,25(2):107-113.
[2]Morel C,Guignard J C,Guillet M.Sliding mode control of DC-to-DC power converters[C]//9th International Conference on Electronics Circuits and Systems,2002,3:971-974.
[3]张晓华,张卫杰.三相电压型PWM整流器的IDA-PB控制[J].电工技术学报,2009,24(3):122-127.Zhang Xiaohua,Zhang Weijie.IDA-PB control for three-phase PWM voltage source rectifier[J].Transactions of China Electrotechnical Society,2009,24(3):122-127.
[4]薛花,姜建国.基于无源性的同步电动机自适应控制[J].电工技术学报,2009,24(10):33-39.Xue Hua,Jiang Jianguo.Adaptive passivity-based control of synchronous motors[J].Transactions of China Electrotechnical Society,2009,24(10):33-39.
[5]张先勇,舒杰.基于无源性理论的双馈风力发电机双PWM变换器协调控制[J].电力系统保护与控制,2010,38(21):184-195.Zhang Xianyong,Shu Jie.Passivity-based co-operation control of dual PWM converters for doubly-fed wind power generator[J].Power System Protection and Control,2010,38(21):184-195.
[6]吴磊涛,杨兆华,胥布工.DC-DC开关变换器的无源控制方法[J].电工技术学报,2004,19(4):66-69.Wu Leitao,Yang Zhaohua,Xu Bugong.Investigation of passivity-based control of DC-DC converter[J].Transactions of China Electrotechnical Society,2004,19(4):66-69.
[7]乔树通,伍小杰,姜建国.基于无源性的滑模控制在DC/DC变换器中的应用[J].电工技术学报,2003,18(4):41-45.Qiao Shutong,Wu Xiaojie,Jiang Jianguo.Application of passivity-based sliding model control in DC/DC converters[J].Transactions of China Electrotechnical Society,2003,18(4):41-45.
[8]Wang B,Ma Y.Research on the passivity-based control strategy of Buck-Boost converters with a wide input power supply range[J].IEEE International Symposium on Power Electronics for Distributed Generation Systems,2010,24(1):304-308.
[9]Kolesnikov A A.Modern applied control theory:synergetic approach in control theory[M].Moscow-Taganrog,Russia:TSURE Press,2000.
[10]王前,李韬.基于变结构的协同控制方法及其在DC-DC开关变换器中应用[J].电力自动化设备,2010,30(4):31-35.Wang Qian,Li Tao.Synergetic control based on variable structure and its application in DC-DC converter[J].Electric Power Automation Equipment,2010,30(4):31-35.
[11]Kolesnikov A,Veselov G,Monti A.Synergetic synthesis of DC-DC Boost converter controllers:theory and experimental analysis[C]//IEEE Seventeenth Annual Applied Power Electronics Conference and Exposition,Dallas,Texas,2002,1:409-415.
[12]Santi E,Monti A,Li D,et al.Synergetic control for DC-DC Boost converter:Implementation options[J].IEEE Transactions on Industry Applications,2003,39(6):1803-1813.
[13]Santi E,Monti A,Li D,et al.Synergetic control for power electronics applications:a comparison with the sliding mode approach[J].WSP Journal of Circuits,Systems and Computers,2004,13(4):737-760.
[14]王学军,文劲宇,程时杰.基于遗传算法的Boost变换器协同控制器设计[J].电力电子技术,2006,40(5):16-18.Wang Xuejun,Wen Jingyu,Cheng Shijie.Design of Boost converter synergetic controller using genetic algorithm[J].Power Electronics,2006,40(5):16-18.
[15]刘杰,周宇博.基于模型的设计—MSP430/F28027/F28335 DSP篇[M].北京:国防工业出版社,2011.
[16]邱银锋,梁志珊.无需检测负载有功电流的一种APF无源性控制方法[J].电力系统保护与控制,2012,40(23):80-86.Qiu Yinfeng,Liang Zhishan.Passivity-based control of APF with no load active current dectection[J].Power System Protection and Control,2012,40(23):80-86.
[17]吕学志,康忠健,梅永超.基于无源性理论的电压不平衡条件下PWM整流器非线性控制策略[J].电力系统保护与控制,2013,41(6):71-76.Lü Xuezhi,Kang Zhongjian,Mei Yongchao.Nonlinear control of PWM rectifier based on passivity theory under unbalanced grid voltage[J].Power System Protection and Control,2013,41(6):71-76.
李红梅 女,1969年生,教授,博士生导师,研究方向为电驱动系统设计及控制和电动汽车技术等。
E-mail:hongmei.li@hfut.edu.cn(通信作者)
叶帮红 男,1987年生,硕士研究生,研究方向为电动汽车技术。
更正
《电工技术学报》2015年第30卷第12期发表论文《基于多阶FDTD雷电感应过电压计算新方法》(第336~343页)求解Agrawal模型耦合方程及处理线路不连续点的二阶FDTD(FDTD 2nd)法所参考文献有误,现将第343页参考文献[13]更正为
[13]Paolone M.Modeling of lightning-induced voltages on distribution networks for the solution of power quality problems and relevant implementation in a transient program[D].Bologna :University of Bologna,2001.
由于作者的笔误造成了本文参考文献的引用错误,特此更正。
The Model-Based Synergetic and Passivity Control of Buck-Boost Converter
Li Hongmei Ye Banghong
(School of Electrical Engineering and Automation Hefei University of Technology Hefei 230009 China)
AbstractTo improve the dynamic and steady performance of Buck-Boost converter,the passivity-based control is introduced to implement the real-time observation of the inductance current.And then,combined with the synergetic control,the control law is obtained,that is,the synergetic and passivity control is suggested to implement the high performance control and strong robustness of Buck-Boost converter.During the process in selecting macro variables of synergetic control,the integral parts are neglected to simplify the controller structure.Furthermore,by adopting the modelbased development procedures and the automatic code generation technology,the experimental prototype of synergetic and passive controlled Buck-Boost converter is developed.The simulation and experimental test validate the dynamic state and steady state controlled performance of the proposed converter.
Keywords:Buck-Boost converter,synergetic and passivity control,robustness,model-based design,automatic code generation
作者简介
收稿日期2013-12-17 改稿日期 2014-01-15
中图分类号:TM46
