天文与深空导航学课程建设、教材编写及教学方法研究
2016-05-06魏二虎刘建栋李征航邹贤才
魏二虎,刘建栋,李征航,邹贤才
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 地球空间信息技术协同创新中心,湖北 武汉 430079)
天文与深空导航学课程建设、教材编写及教学方法研究
魏二虎1,2,刘建栋1,李征航1,邹贤才1
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 地球空间信息技术协同创新中心,湖北 武汉 430079)
Study on the Construction,Textbook Writing and Teaching Methods of Celestial and Deep Space Navigation
WEI Erhu,LIU Jiandong,LI Zhenghang,ZOU Xiancai
摘要:介绍了主要的天文与深空导航手段及其精度、天文与深空导航学发展概况和课程建设背景,阐述了《天文与深空导航学》教材的主要内容和特色,总结了天文与深空导航学课程的教学方式和效果。
关键词:天文与深空导航学;课程建设;教材编写;教学方法;教学效果
21世纪以来人类的深空探测活动范围越来越广,太阳系内的行星几乎都有人类发射的探测器留下的踪迹。对自主、高精度、连续、实时的深空导航的需求越来越迫切。传统天文光学导航在探测器姿态确定方面具有优势,综合USB-VLBI技术引领着探测器定位的实用领域,而X-射线脉冲星导航是未来星际导航的发展方向。天文与深空导航的结合具有极大的应用价值和发展前途。
经典深空导航采用VLBI技术和USB技术,获取“时延”和“速度及变化量”观测量,然后经过最小二乘方法或卡尔曼滤波方法计算探测器的位置和速度。VLBI和USB技术属于非自主导航模式。上述方法测量探测器矢径和径向速度的典型随机误差是1 m和0.1 mm/s[1]。干涉方法可以提高角度分辨率,从而位置误差对于地球到探测器距离达到1个天文单位会有4 km的误差[2]。随着距离的增加,探测器的位置精度也会降低:当探测器在冥王星轨道距离上,位置精度达200 km;当探测器在Voyager 1距离上,位置精度可达500 km[3]。上述技术组成的DSN系统已成功应用于多项深空探测任务中,取得了辉煌的成绩。但是上述系统的缺点也是明显的[3-6]:
1) 需要复杂的地面系统和庞大的人员支持;
2) 测量误差随着距离的增加而增加;
3) 远距离通信困难。
因此,采用自主导航方式对于深空探测具有重要意义,可以较好地克服上述缺点。
传统天文导航利用行星或其他天体及恒星跟踪观测量,结合轨道方程采用卡尔曼滤波来估计探测器的位置。NASA的“天文导航和姿态基准系统”采用空间六分仪敏感月球(地球)边缘和恒星,经过卡尔曼滤波,估计的低轨道卫星位置精度可达244 m(1 sigma)[7-8]。Microcosm公司的麦氏自主导航系统通过探测器上安装的敏感器观测对地球、太阳和月球的方向及对地球的距离,计算获得的低轨道探测器位置精度可达100~1500 m(3 sigma)[9]。搭载在深空1号探测器上的自主光学导航系统(AUTONAV)可以为探测器提供含有250 km的位置误差及0.2 m/s的速度误差的轨道[10]。
利用脉冲星进行星际导航的概念最初由Downs提出,概算精度可以达到1500 km[11]。Chester 和 Butman 提出使用X-射线脉冲星进行导航的概念,概算位置精度可达150 km[12]。Sheikh详细阐述了X-射线脉冲星导航的基本原理和算法[13]。笔者等研究了X-射线脉冲星导航用于环火探测器的定位研究中,位置误差保持在1 km以内[14]。
上述天文与深空导航技术广泛应用于深空探测器的导航、定位和测姿过程中,解决了人造探测器探月、探火、小行星探测乃至遥远星际航行的导航问题,深空探测已经离不开天文与深空导航学的技术支持。在这种背景下,对天文与深空导航技术人才的需求变得越来越迫切,天文与深空导航技术的普及和应用已经成为一种趋势。然而,目前国内天文与深空导航学的教学建设还处在起步阶段,需要快速建设以支持我国关于建设独立自主运行的卫星导航系统、月球探测及火星探测等计划和空间科学技术的长远发展战略。
一、天文与深空导航学教材内容框架和教材特色
天文导航是一门通过观测自然天体获得方向或角度观测值以确定航行器运行轨迹和姿态的古老艺术与科学。天文导航起源于航海,是古代航海最重要的导航方式之一。在20世纪60年代左右,天文导航因其具有无须地面辅助、全球覆盖、无法干扰信号源和被动接收信号等特点为美、俄等国的军事导航定位应用所看重,并将该技术成功应用于导弹导航。紧接着该技术即被应用于深空导航中,焕发出新的活力,并结合其他深空导航技术成功将阿波罗飞船送上月球并返回[15]。直到今天的深空探测任务,天文导航技术仍然具有实际的应用价值,如火星快车号就利用星敏感器以测定其姿态[16]。
1. 教材内容框架
《天文与深空导航学》是在吸收国际前沿成果和项目组自主创新研究基础上撰写而成,最初作为相关课程的讲义在教学过程中予以实践,取得了良好的教学效果。该书系统地阐述了天文导航和深空导航的基本概念和原理、基础理论和方法、数学模型和算法、经典技术及其应用。全书共分为8章。
第1章为天文导航与深空导航的基础知识,简要介绍了天文与深空导航的基本概念、历史发展、技术应用特点、球面三角、导航的时空基准,以及导航天文学。通过对基础天文导航数学基础知识的把握,学生可以深刻理解天文导航的基本原理。
第2章着重讨论了天文导航的天体敏感器,包括天体敏感器的分类,以及恒星敏感器、太阳敏感器、地球敏感器、其他天体敏感器的基本组成和工作原理。本章着重介绍天文敏感器的工作原理和敏感精度,对学生掌握测量器件的硬件组成和测量精度有了较深刻的感受。
第3章在概述低轨地球卫星自主天文导航的基础上,介绍了直接敏感地平、间接敏感地平和纯天文几何解析法自主天文导航的基本原理,并分析各个技术在低轨地球卫星导航应用中的性能,探讨了基于直接敏感地平和间接敏感地平的组合导航方式。
第4章为深空探测器的自主天文导航原理与方法,详细阐述了深空探测的定义和重要性,介绍了地月转移轨道上的天文导航方法和相应的动力学方程、测量方程;介绍了月球卫星的天文导航方法和相应的动力学方程、测量方程;最后介绍了深空探测器纯天文几何解析定位方法的基本原理和测量方程。第3章和第4章介绍了天文导航技术的两种应用,将天文导航技术引入了实用舞台。
第5章详尽论述了VLBI用于深空探测器导航的原理及方法,分别介绍了经典VLBI深空导航原理及应用、差分VLBI(D-VLBI)深空导航原理及基本数学模型、同波束VLBI(SBI) 深空导航原理及基本数学模型和影响因素。
第6章在简要阐述USB基本概念的基础上,介绍了USB技术用于深空探测器测距、测速的基本数学模型和集成USB-VLBI技术的相关应用。
第7章详细论述X射线脉冲星自主导航这一新型天文导航方法的基本原理、导航数学模型、误差分析、基于X射线脉冲星的航天器自主导航滤波算法、脉冲星在深空探测中的应用、美国的X射线脉冲星导航计划。
第8章概括论述了美国、俄罗斯、欧洲、日本和中国的深空探测计划。
2. 教材特色
本教材与目前的相关天文与深空导航的教材相比,本教材系统地吸收了近年来深空导航和天文导航的前沿研究成果,对相关导航技术作了详尽的原理性阐述。使用本教材开展教学,学生既可以全面了解和掌握前沿天文与深空导航技术,又可以打下较好的深空导航数学模型基础。教材具有以下所述特点。
(1) 前沿性
教材吸收了自主天文导航的最新研究成果,详细阐释了差分VLBI、同波束VLBI的数学模型,介绍了最新的X-射线脉冲星导航技术。这些技术是天文与深空导航的最新技术,具有很高的学术参考价值。
(2) 综合性
教材吸收了主要的天文与深空导航技术:传统光学天文导航、VLBI测量技术、USB测量技术和X-射线脉冲星导航技术。这些技术是深空探测中的主要应用技术,力求全面综合地阐述天文与深空导航的发展历程。
(3) 实用性
教材例证丰富翔实,在每一章后面都有若干习题供学生练习。书中的计算都给出了初始值,学生可根据初始值方便地实现编程。教材着重强调基本原理的掌握与理解,数学推导详细,实用性很强。
二、天文与深空导航学的教学效果
天文与深空导航学课程以《天文与深空导航学》讲义为依托,配合相应的PPT课件一套,以课堂讲授的方式为主,配以课外作业、课堂报告、课堂讨论等方式进行。由于本科生学制的改变以及学时的削减,如何在短短的36学时内上好这一门内容丰富、难度系数比较大的课程具有较大的挑战性。
根据多年的教学经验得出,互动讨论可以让学生在最短的时间内掌握新课程的基本概念,对课程的基本内容、基本理论有一个全面、清晰、正确的认识尤为重要。
在课程的讲授过程中,鼓励学生探讨讲义中的问题,根据讲义给出的参考文献索引进行文献查找,发掘学生自主思考、自主学习的能力。对各章中学生提出的问题(通过邮件)(如图1所示),都给了耐心细致的解答。学生对于问题的解答都给予了较高的评价,教学效果突出有效。
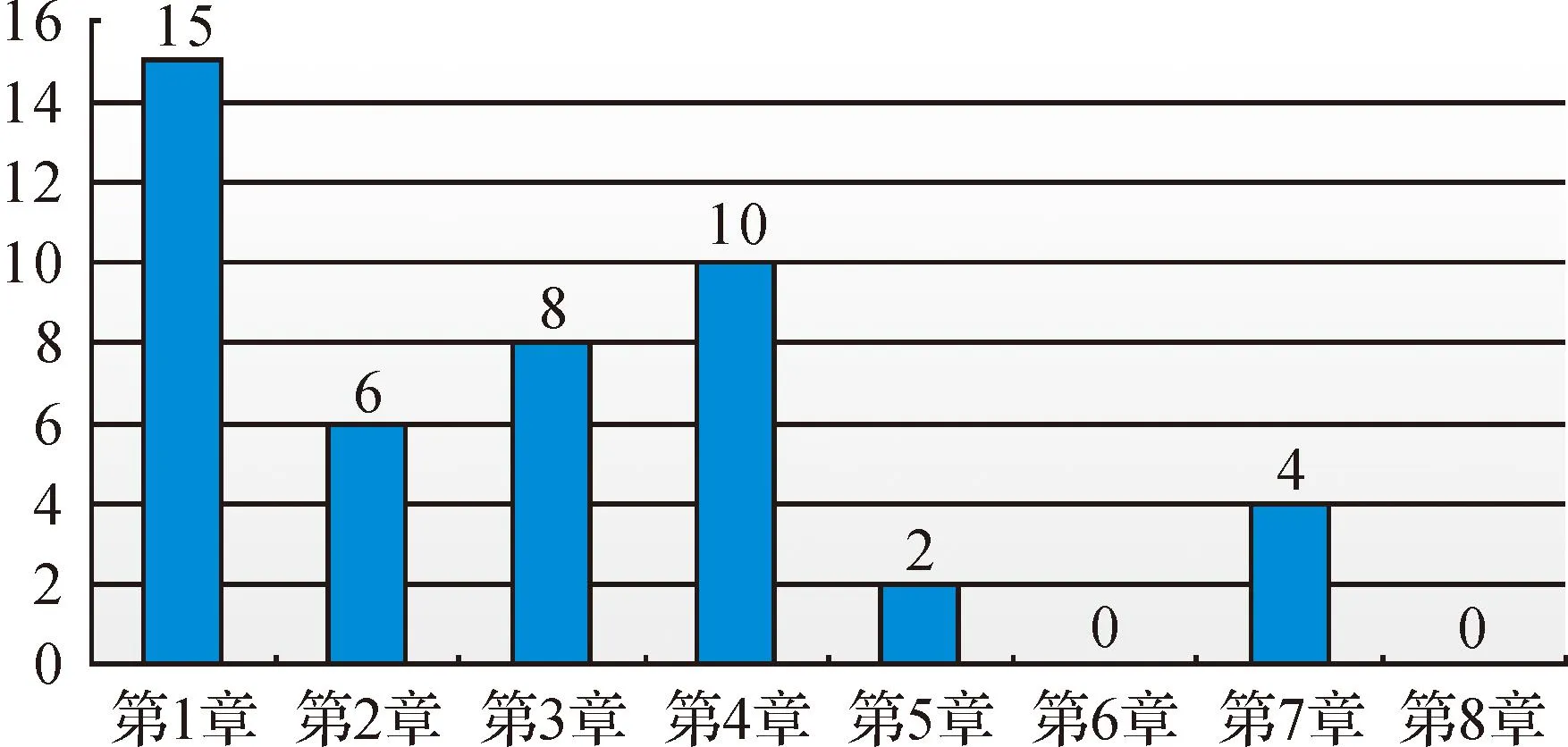
图1 各个章节通过邮件交流的问题数量
经过这种交互式学习和对教材的详细讲解,学生对于天文与导航学基础知识有了较深入的理解和把握。学生的测试成绩如图2所示。在课程的讲授过程中,力求明确重点,抓住基础,把握学科前沿,综合天文与深空导航的多种应用技术,力求加大课程的信息量,取得了较好的教学成果。学生对于课程的教师的教学态度、教学内容、教学方式、教学管理、教学效果5个大项18个小项的评分如图3所示,学生对于课程设置的4个小项的评价如图4所示。

图2 学生测试成绩分段人数
根据上述4幅图的统计结果,说明“天文与深空导航学”的课程开设得非常有必要,学生的反响积极,教学效果优良。在讲义和教材的编写过程中,由于时间仓促,虽然力图详尽合理,但是在讲授的过程中发现课时紧张的问题,故需要加长课时。在教学和教材编写过程中,努力使教学任务和科研前沿相互结合,发表了1篇SCI文章和若干篇相关科研文章。
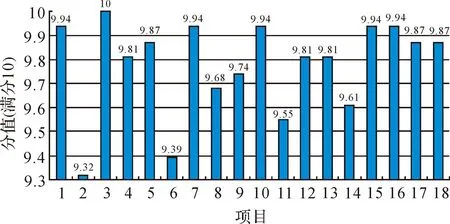
图3 学生对于教师课程讲授质量的综合评价分数
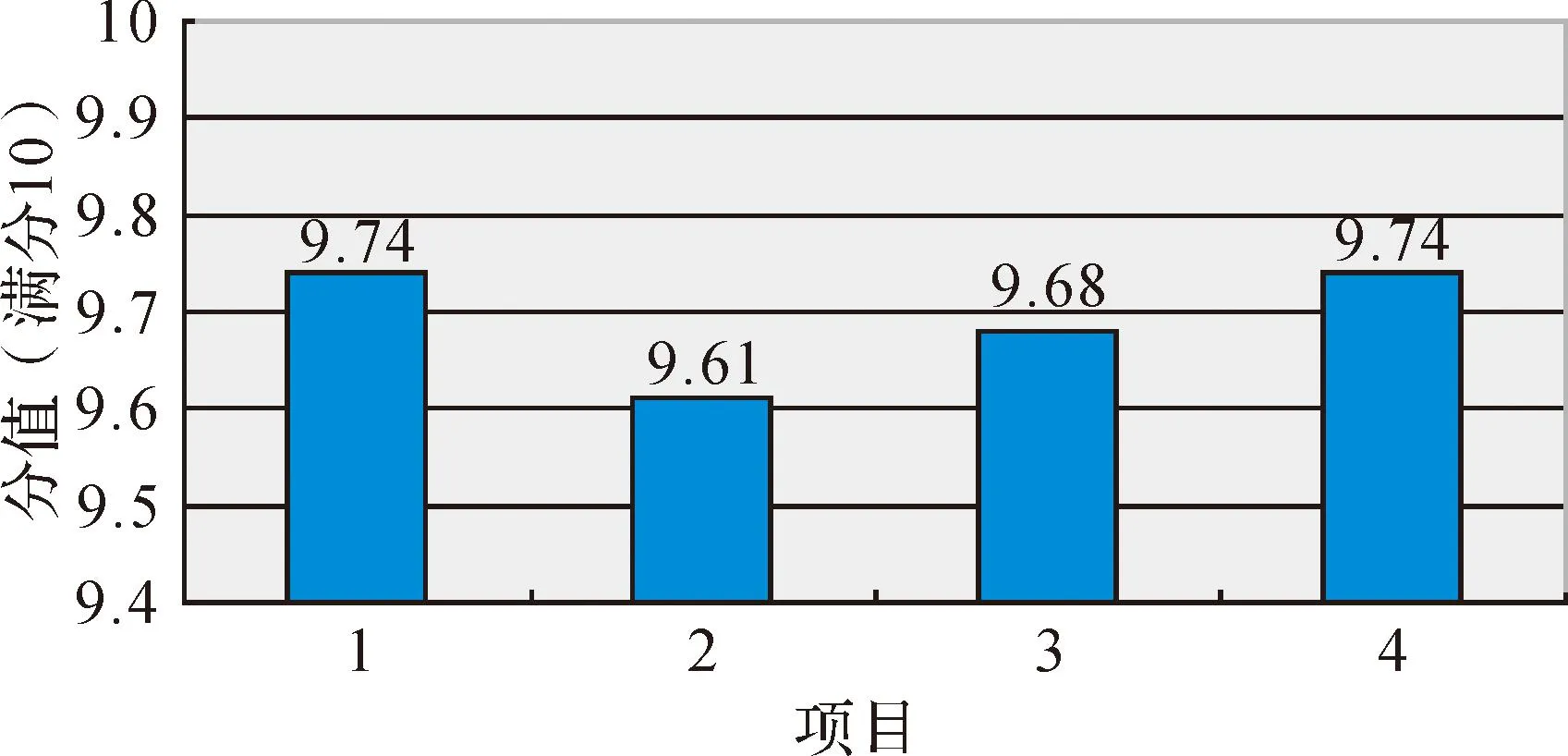
图4 学生对于课程的评价
三、结束语
《天文与深空导航学》教材及其教学方法已于2014年3月运用在武汉大学测绘学院导航工程2012 级本科生的教学中。教学反映比较好,课程内容信息量大,基本达到预期目标,不足之处在以后的教学过程中逐步加以完善。虽然在教学中力求讲解透彻,但是限制于学时的短促,难以全面概括这门学科的前沿性内容,建议增加到45或54课时会达到更好的教学效果。
参考文献:
——a New Technique for ESA’s Deep Space Navigation[J]. ESA Bulletin, 2006, 128: 68-74.
[2]JAMES N, ABELLO R, LANUCARA M, et al. Implementation of an ESA Delta-DOR Capability[J]. Acta Astronautica, 2009, 64(11-12): 1041-1049.
[3]BECKER W, BERNHARDT M G, JESSNER A. Autonomous Spacecraft Navigation with Pulsars[J]. Acta Futura, 2013, 7: 11-28.
[4]BORDER J S, DONIVAN F F, FINLEY S G, et al. Determining Spacecraft Angular Position with Delta VLBI: The Voyager Demonstration[C]∥AIAA/AAS Astrodynamics Conference. San Diego CA: AIAA, 1982.
[5]HEMMATI H. Deep Space Optical Communications[M]. 2nd ed. New Jersey: John Wiley & Sons, 2006.
[6]GRAVEN P, COLLINS J, SHEIKH S, et al. XNAV for Deep Space Navigation[C]∥Proceedings of the 31st Annual AAS Guidance and Control Conference. Breckenridge: AAS, 2008: 8-54.
[7]MIKELSON A D. Design and Laboratory Testing of Self-Contained High Altitude Navigation System. Phase I. The Space Sextant Autonomous Navigation Attitude Reference System (SS-ANARS)[R]. [S.l.]: Martin Marietta Aerospace Denver Colo Denver Div, 1977.
[8]BOOKER R A. Space Sextant Autonomous Navigation and Attitude Reference System——Flight Hardware Development and Accuracy Demonstration[C]∥Guidance and Control Conference. Keystone, Colorado: American Astronautical Society, 1978.
[9]TAI F, NOERDLINGER P D. A Low Cost Autonomous Navigation System[C]∥Guidance and Control 1989: Proceedings of the Annual Rocky Mountain Guidance and Control Conference. Torrance: Keystone CO, 1989: 3-23.
[10]RIEDEL J E, BHASKARAN S, RIEDEL J E, et al. Autonomous Optical Navigation DS1 Technology Validation Report[R]. Report A01-26126, Pasadena, CA: Jet Propulsion Laboratory, California Institute of Technology, 2000.
[11]DOWNS G S. Interplanetary Navigation Using Pulsating Radio Sources[R]. [S.l.]: NASA TR N74-34150, 1974.
[12]CHESTER T J, BUTMAN S A. Navigation Using X-ray Pulsars[R]. NASA Technology Report 81N27129, Pasadena, CA: Jet Propulsion Laboratory, 1981.
[13]SUNEEL S I. The Use of Variable Celestial X-ray Sources for Spacecraft Navigation[R]. Maryland: Department of Aerospace Engineering University of Maryland, 2005: 180-185.
[14]WEI E, JIN S G, ZHANG Q, et al. Autonomous Navigation of Mars Probe Using X-ray Pulsars: Modeling and Results[J]. Advances in Space Research, 2013, 51(5): 849-857.
[15]HOAG D G. The History of Apollo Onboard Guidance, Navigation, and Control[J]. Journal of Guidance, Control, and Dynamics, 1983, 6(1): 4-13.
[16]CHICARRO A, MARTIN P, TRAUTNER R. The Mars Express Mission: an Overview[J]. Mars Express: The Scientific Payload, 2004, 1240: 3-13.
中图分类号:G64
文献标识码:B
文章编号:0494-0911(2016)03-0138-04
作者简介:魏二虎(1965—),男,博士,教授,主要从事空间大地测量和地球动力学研究。E-mail: ehwei@sgg.whu.edu.cn
基金项目:国家自然科学基金(41374012); 武汉大学测绘学院2012年本科专业综合改革教学研究项目(201220)
收稿日期:2015-01-26
引文格式: 魏二虎,刘建栋,李征航,等. 天文与深空导航学课程建设、教材编写及教学方法研究[J].测绘通报,2016(3):138-141.DOI:10.13474/j.cnki.11-2246.2016.0107.