GPS/INS位置、速度和姿态全组合导航系统研究
2016-05-06马宏阳程鹏飞黄华东
马宏阳,程鹏飞,黄华东
(1. 武汉大学卫星导航定位技术研究中心,湖北 武汉 430079; 2. 中国测绘产品质量检验测试中心,
北京 100830; 3. 南京市城市地下管线数字化管理中心,江苏 南京 210000)
GPS/INS位置、速度和姿态全组合导航系统研究
马宏阳1,程鹏飞2,黄华东3
(1. 武汉大学卫星导航定位技术研究中心,湖北 武汉 430079; 2. 中国测绘产品质量检验测试中心,
北京 100830; 3. 南京市城市地下管线数字化管理中心,江苏 南京 210000)
Research on the Complete Integrated GPS/INS Navigation System of Position,Velocity and Attitude
MA Hongyang,CHENG Pengfei,HUANG Huadong
摘要:传统的GPS/INS组合导航是以位置和速度为观测量进行组合,其可观测性与载体的运行轨迹有关,从而影响整个系统的精度和可靠性。为解决这一问题,本文提出了地固坐标系下的位置、速度和姿态全组合方法,推导了GPS多天线测姿的误差方程,给出了姿态误差与平台失准角之间的转换关系,在传统的位置和速度组合基础上建立了全组合导航的数学模型,并通过实测机载数据对该模型进行检验。结果表明,该模型显著提高了姿态精度,对速度和位置精度也有一定程度的提高。
关键词:组合导航;全组合;地固坐标系;姿态
GPS/INS组合导航系统综合了GPS和INS的优点,同时克服了各自的缺点,已成为当今导航系统的一个重要发展方向[1]。随着GPS应用技术进一步发展,GPS多天线测量获取实时姿态已进入实用阶段[2-3],因此在传统的位置和速度组合中加入姿态组合,可以克服传统组合方式中姿态误差及INS元件误差需要根据位置和速度等误差之间的关系来估计的缺陷,提高导航定位的精度。
许多学者在位置和速度组合的基础上提出了附加外部辅助信息测量姿态的组合方式。文献[4]提出当地水平坐标系下速度/姿态的组合方法,但没有考虑位置的组合;文献[5]提出一种姿态角更新算法,但仅适用于车载导航;文献[6—7]提出GPS单天线测姿技术,即载体运动的情况下,由GPS观测到的载体的加速度和速度计算载体的姿态角,但由于受加速度计、陀螺仪等误差影响,得到的姿态角精度较低。
本文采用位置、速度和姿态全组合方式进行组合导航,导航坐标系选择地固系,其优点是可以直接输出地固系中载体的位置及经纬度。通过在载体上方布设3台接收机天线,利用直接法求取载体的3个姿态参数,与位置和速度共同作为观测量进行组合导航。本文介绍了全组合方式的状态模型和观测方程,推导的GPS姿态测量的误差矩阵及全组合观测噪声矩阵,利用实测的机载数据与位置和速度组合对比验证全组合方式的有效性。
一、状态方程
组合导航系统选用15维系统状态参数,分别为位置误差、速度误差、平台失准角误差、加速度计偏置和陀螺仪漂移,系统状态向量为
Xk=[δrxδryδrzδvxδvyδvzεxεyεzaxayazgxgygz]
(1)
因此,在k历元组合导航系统误差状态方程为
(2)
式中,Fk为连续系统的状态转移矩阵;Gk为系统动态噪声矩阵;Wk为系统白噪声矢量。式中符号具体表达式可参考文献[7—8]。
二、量测方程
1.GPS测姿误差
载体的姿态是指载体坐标系相对于当地水平坐标系各轴的角度关系,一般由3个姿态角确定载体的姿态[9],分别为航向角(Yaw)、俯仰角(Pitch)和横滚角(Roll)。在实际测量姿态中,一般采用直接法,GPS天线布局如图1所示,以某个天线为基站,并视为载体坐标系原点,由此三角形确定的面为载体姿态的参考面,参考面的法向n的方向变化即为载体姿态变化。
为计算3个姿态角,应将测得的空间直角坐标转换为以天线1为原点的载体坐标系中。假设天线2和天线3在载体坐标系的坐标分别为(x2,y2,z2)和(x3,y3,z3),则载体姿态可由直接法求出[10]
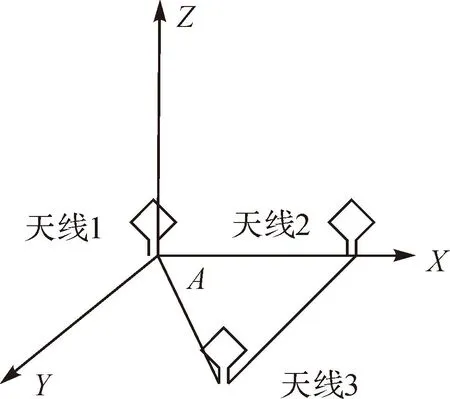
图1 GPS天线布局
(3)
(4)
(5)
为了得到姿态角的量测误差,分别对式(3)—(5)求微分得
(6)
(7)

(8)
由式(6)—(8),可得近似的姿态测量误差为
(9)
(10)
(11)
式中,l12、l13分别为天线1到天线2和天线3的距离;A为图1中l12和l13之间的夹角。由式(9)—(11)可知,航向角和俯仰角的精度与l12的长度成反比,横滚角的精度与l13的长度成反比,当l12与l13垂直时,横滚角的误差最小。
2. 姿态误差与平台失准角之间关系

(12)
φ=[δφxδφyδφz]
(13)
捷联惯导系统计算得到的姿态矩阵为
(14)

将式(12)代入式(14),忽略二阶小量,可以得到姿态角误差和平台失准角之间的变换关系为
(15)
(16)
3. 全组合量测方程
全组合方式选取GPS和INS各自输出的位置、速度和姿态之差作为观测量构造量测方程。假设GPS和INS在地固系中位置、速度和姿态输出分别为rg、vg、ag和ri、vi、ai,观测向量可以表示为
(17)
式(17)的误差方程为
(18)

(19)
式中,I6×6为单位阵。由式(15)可得
(20)

(21)
三、试验分析
1. 全组合参数设置
本文的试验数据采用北京中测新图2011年8月25日采集的航空飞行数据,飞行时间约2.6 h。飞行轨迹及使用的组合导航参数分别如图2和表1所示。
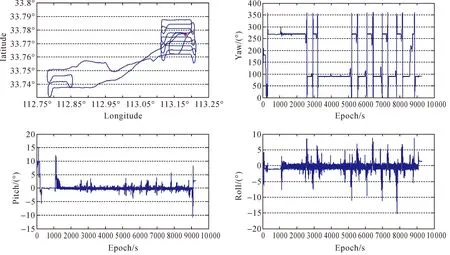
图2 载体运动轨迹
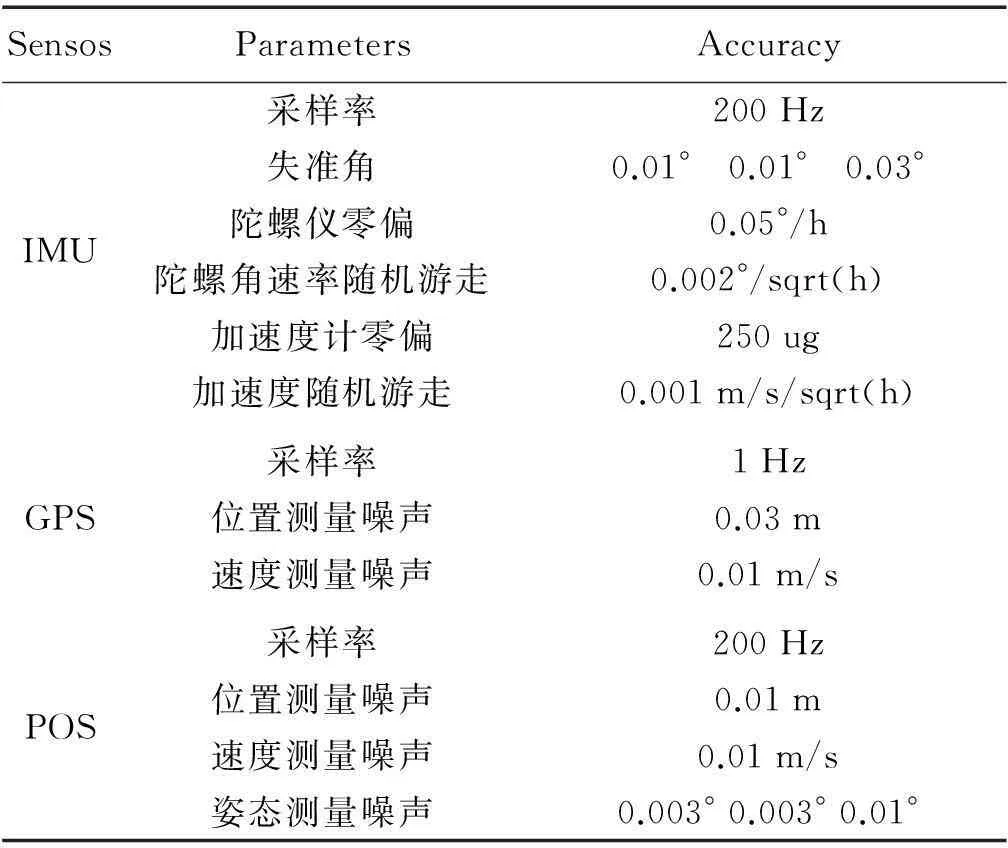
SensosParametersAccuracyIMU采样率200Hz失准角0.01° 0.01° 0.03°陀螺仪零偏0.05°/h陀螺角速率随机游走0.002°/sqrt(h)加速度计零偏250ug加速度随机游走0.001m/s/sqrt(h)GPS采样率1Hz位置测量噪声0.03m速度测量噪声0.01m/sPOS采样率200Hz位置测量噪声0.01m速度测量噪声0.01m/s姿态测量噪声0.003°0.003°0.01°
由式(9)—式(11)可知,通常点位中误差为0.5 cm,高程中误差为1 cm,可以推算,对于1 m的基线,航向角和俯仰角可达0.1°的精度,横滚角可达0.2°的精度,量测噪声协方差阵为
Rk=diag[(σrxσryσrzσvxσvyσvzσyσpσr)]2
(22)
2. 试验分析
本文分别使用全组合模式和位置/速度组合模式与NovAtel公司研制的Inertial Explorer软件计算得到的结果作对比,结果如图3与表2所示。
由图3可以看出,全组合模型对于姿态精度的提高非常明显,航向角一般被认为是最难估计的参数,在全组合模式下精度也得到改善。速度和位置组合的横滚角和俯仰角在飞机转弯等大机动飞行时出现大幅震荡的情况,但在全组合模式中横滚角和俯仰角受到的影响较小,这是由于引入了GPS的姿态信息,使得系统的可观测性得到了改善,不受载体的飞行轨迹影响,从而提高了姿态角的精度。速度精度也有较大的提高,并且没有出现某些历元解算出现跳变。这说明姿态组合对于组合导航系统数据有一定的平滑作用,增强了系统的稳定性。
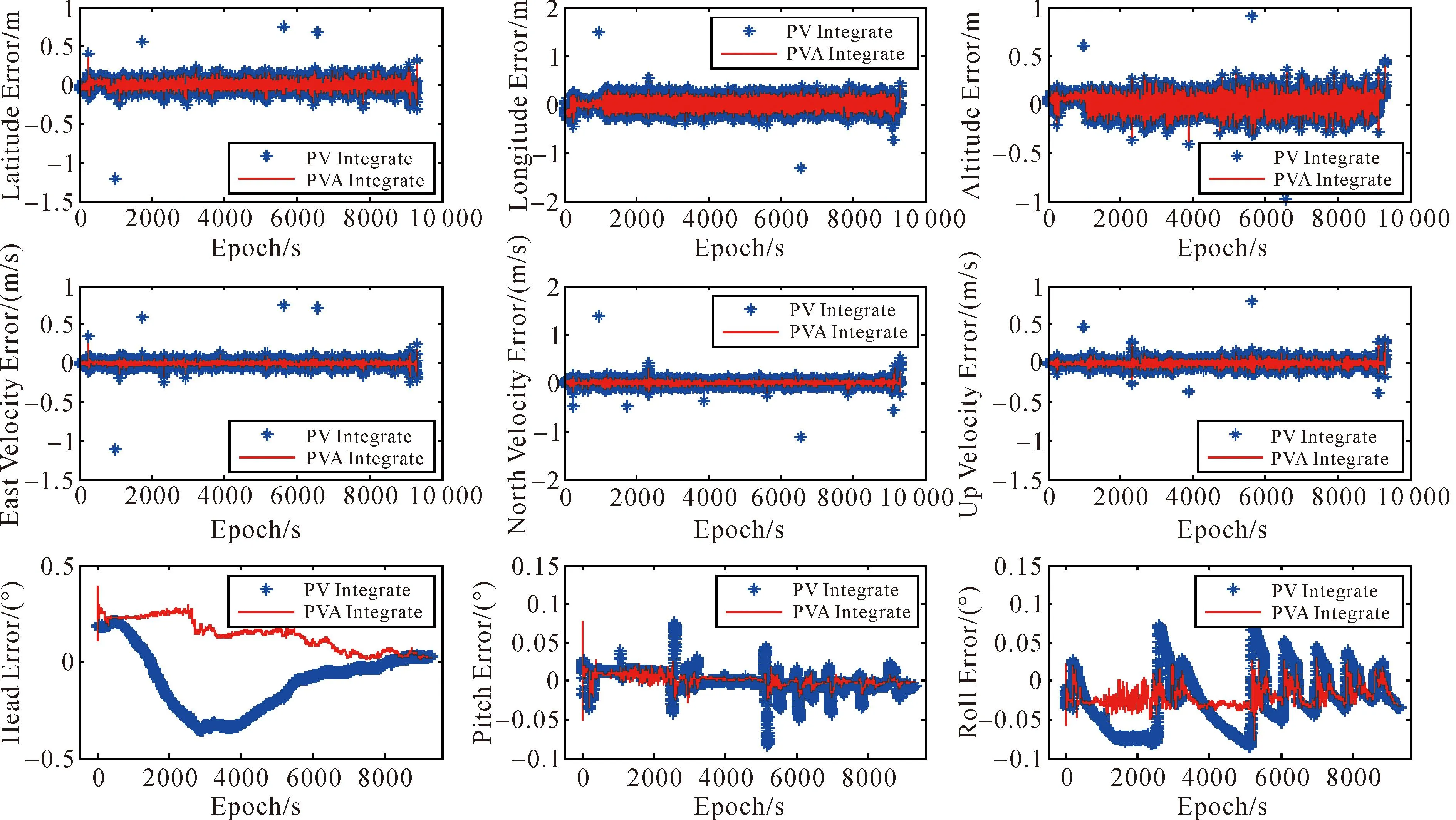
图3 两种组合方式解算误差
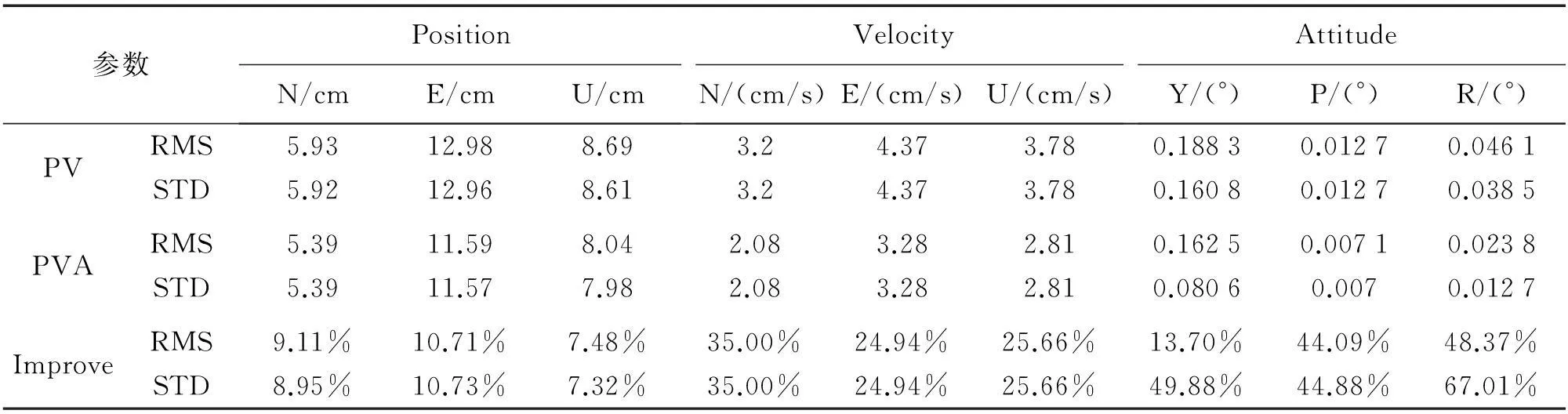
参数PositionVelocityAttitudeN/cmE/cmU/cmN/(cm/s)E/(cm/s)U/(cm/s)Y/(°)P/(°)R/(°)PVRMS5.9312.988.693.24.373.780.18830.01270.0461STD5.9212.968.613.24.373.780.16080.01270.0385PVARMS5.3911.598.042.083.282.810.16250.00710.0238STD5.3911.577.982.083.282.810.08060.0070.0127ImproveRMS9.11%10.71%7.48%35.00%24.94%25.66%13.70%44.09%48.37%STD8.95%10.73%7.32%35.00%24.94%25.66%49.88%44.88%67.01%
由表2的统计结果也可以看出,全组合模式对姿态精度改善最大,横滚角和俯仰角的RMS和STD都提高了40%以上,虽然航向角的RMS变化不是很明显,但其STD变小,说明结果更加平滑。由于姿态角精度的改善,3个方向的速度精度也有一定程度的提高,但位置精度几乎没有变化,主要原因是为了简化计算,在状态模型中忽略了一些次要的误差项,如GPS位置误差等。另外,对系统噪声和观测噪声的统计特性缺乏足够的了解也抵消掉了一部分提高的精度。
四、结束语
本文在传统GPS/INS位置和速度组合的基础上增加了姿态观测,通过推导GPS与INS量测姿态之间的差值与平台失准角之间的关系,给出了位置、速度和姿态全组合的量测方程,分析了GPS的测姿精度,并由此给出量测噪声协方差阵。以商业软件IE的解算结果作为参考,全组合方案相对于传统的位置和速度组合姿态角和速度精度有了较大改善,位置精度几乎没有变化。
参考文献:
[1]YANG Y. Tight Coupled MEMS INS/GPS Integration with INS Aided Receiver Tracking [D]. Calgary: University of Calgary, 2008.
[2]刘新明, 赵李健. 一种GPS测姿系统的设计及精度分析[J]. 中国惯性技术学报, 2013, 21(1): 77-79.
[3]TEUNISSEN P J G, GIORGI G, BUIST P J. Testing of a New Single-frequency GNSS Carrier Phase Attitude Determination Method: Land, Ship and Aircraft Experiments [I]. GPS Solutions, 2011, 15(1): 15-28.
[4]蒋庆仙. 关于MEMS惯性传感器的发展及在组合导航中的应用前景[J]. 测绘通报, 2006(9): 5-8.
[5]吴富梅, 聂建亮, 何正斌. 低成本车载GPS/INS组合导航姿态角更新算法[J]. 中国惯性技术学报, 2000, 18(6): 675-679.
[6]项冬. 高精度机载INS/GPS组合导航关键算法研究[D]. 北京:中国测绘科学研究院, 2013.
[7]SHIN E. Estimation Technique for Low-cost Inertial Navigation [D]. Calgary: University of Calgary, 2005.
[8]何晓峰. 北斗/微惯导组合导航方法研究[D]. 长沙: 国防科技大学, 2012.
[9]田增山, 胡小川, 刘丽川. GPS姿态测量系统基线长度和天线布局设计[J]. 电波科学学报, 2001, 9(3): 379-383.
[10]赵建虎, 刘经南, 周丰年. GPS测定姿态方法研究[J]. 武汉测绘科技大学学报, 2000, 25(4): 353-357.
[11]董绪荣. GPS/INS组合导航定位及其应用[M]. 长沙:国防科技大学出版社, 1998.
天宝推出石油天然气系列服务产品,提供跟踪、分析、导航和安全解决方案
[本刊讯]天宝公司(Trimble)近期宣布推出专门用于管理石油天然气行业的井场服务车队和设备的系列服务产品。客户能够采用全方位的系列解决方案提高跟踪负载、票务处理、租赁道路导航和服务时长记录等方面的工作效率。天宝石油天然气系列产品包括:
1) 交通管理和票务。油田运输管理系统 (TMS) 为移动作业的工作人员提供了连接功能、可视化的车队管理系统及其操作技术。TMS 集成了多家天宝运输物流公司提供的数据和服务,能够提供价值并提高性能。其功能包括:日常调度和票务处理加速入站,订单管理的同时自动计费步骤可减少应收账款周转天数 (DSO);实时的电子数据工作流,可替代容易出错的人工数据输入和文稿处理;与制造商和井场运营者之间的电子订单和发票交换,包括适用于更大型合作伙伴的电子数据交换 (EDI);将现场实时状态和关键信息自动传送至办公室;将数据直接传送给客户以供验证,直接传送到财务部门以供计费和自动批准发票。
2)车队跟踪和资产追踪。 车队跟踪和资产跟踪 (The Fleet Tracker and Asset Tracker) 服务为公司提供 GPS 和卫星远程跟踪功能,支持监控关键资产,并提供事件监控和远程资产跟踪数据。
3) 油田测绘与车内导航。油田测绘与车内导航服务提供了详细的越野数据,能够支持油田进行安全导航,减少绕行造成的昂贵支出,通过直接导航到工地现场提高工作效率。车内导航可支持驾驶员和工作人员轻松沿着正确路线到达私人出租的路线、井场、设施和调查地点。
4) 原油工作流。原油工作流 (The Crude Oil Workflow) 专门为原油运输行业设计,可自动完成耗时的文书工作并实时集成信息,从而提高运输操作的效率,可提高原油工作流的配送与集货速度和准确性。
5) 禁用射频。天宝的禁用射频 (Radio Frequency Disable) 服务可确保在敏感的场地自动关闭卡车内的所有射频设备,从而防止可能发生的事故。
6) 文档管理和成像。文档管理系统采用了先进的成像工作流,可减少人工处理文书导致的效率低下问题,数字化关键业务数据,实现跨多个业务部门的流程自动化。其功能包括:扫描和管理用于应收账款、应付账款、承运人协议、人力资源和维护流程的电子文档;减少因文书缺失或难以寻找而导致的瓶颈,改进现金流和 DSO。
7) 资产维护与管理。资产维护与管理软件能够在帮助车队增加设备正常运行的时间及 DOT 规范性的同时控制维护和维修成本。其功能包括:预防性维修调度和服务电话跟踪;技师排班调度;第三方维护审批和成本报告;零件采购和库存追踪,燃油和轮胎使用报告,保修复原支持。
8) 云托管服务。云托管服务为维护安全的业务应用环境而不断升高的成本提供了经济高效的替代方案。适用于关键操作的托管服务和车队维护软件能够提供更大的业务灵活性。其功能包括:快速、灵活的应用和服务部署;可靠的基础设施;重大灾难复原和业务连续性服务。
(本刊编辑部)
中图分类号:P228
文献标识码:B
文章编号:0494-0911(2016)03-0010-05
作者简介:马宏阳(1991—),男,硕士生,研究方向为GNSS精密数据处理。E-mail: mahongyangcm@163.com
基金项目:国家自然科学基金(2014AA123101)
收稿日期:2014-11-15; 修回日期: 2015-11-15
引文格式: 马宏阳,程鹏飞,黄华东. GPS/INS位置、速度和姿态全组合导航系统研究[J].测绘通报,2016(3):10-14.DOI:10.13474/j.cnki.11-2246.2016.0074.