基于巡检方案事件检出概率的长距管线无人机总体设计
2016-05-05王翔宇王跃鲍蕊蒋崇文万志强
王翔宇, 王跃, 鲍蕊, 蒋崇文, 万志强
北京航空航天大学 航空科学与工程学院, 北京 100191
基于巡检方案事件检出概率的长距管线无人机总体设计
王翔宇, 王跃, 鲍蕊*, 蒋崇文, 万志强
北京航空航天大学 航空科学与工程学院, 北京100191
摘要:人为盗油案件是危害油气管线安全的主要形式之一,采用无人机对管线进行监控具有高效、灵活、不受地形限制等优势。通过建立无人机(UAV)管线巡检的数学概率模型,定量研究影响事件检出概率的因素,提出提高事件检出概率的方法;通过定量研究不同任务模式及其组合下巡检方案的事件检出概率,与无人机总体设计相联系,总结出基于目标的无人机总体和方案协同设计方法;最后对比分析并优选出最佳方案。
关键词:油气管线; 事件检出概率; 概率模型; 无人机总体设计; 方案设计
长距管线运输是当前高效成熟的油气资源运输方式。然而外界环境因素给管线带来了以腐蚀老化和人为盗油为主的安全隐患[1],其中应对腐蚀老化采取的检漏有较为成熟的硬件法(磁通法和超声法等)[2]和软件法(数据采集与监视控制(SCADA)系统)[2-3]等;而预防人为盗油方面目前主要依靠人力车辆沿线进行定期巡检,效果非常有限[4-6]。
当前的盗油案件主要由小规模团队在15 min左右快速完成[7];案发地点集中在人烟稀少但又有道路设施的管线处[7],发生时间集中在黑夜,但随机性强,夜里随时可能发生[8]。盗油案件一旦发生后果非常严重,杜绝盗油案件需做好预防工作。
低空无人机(UAV)巡检机动灵活,不受地形云层影响。目前国内外已有很多研究关注到无人机监测的突出优势[4-5, 9-10]。2010年在加拿大Montreal召开的首届International Conference on Applied Robotics for the Power Industry提出在能源运输产业上应用无人机技术的国际合作[4]。未来在长距管线监控上,无人机具有良好的应用前景。
现阶段国内对无人机管线巡检系统研究关注的重点集中在方案可行性、系统寿命和无人机总体设计等方面[10]。对于机群出动频率和任务模式等设计有基于排队模型的定量分析[11-12]和仿真模拟等。但这些手段主要考虑机群自身,适用于民用机场和舰载机群等复杂飞行器系统运作分析。管线巡检所用无人机个体简单、维修管理容易,关注重点是无人机巡检系统能否实现盗油案件的预防。目前针对这样具体的目标,对无人机巡检方案的定量分析和优化设计方法还存在不足。
本文首先通过建立数学模型定量分析影响事件检出概率的因素,并讨论改进措施;然后分析任务需求,进行质量平衡、功率平衡迭代下的无人机总体设计,结合总体设计结果和概率模型,制定满足给定的事件检出概率的巡检方案;最后在所有可行方案中对比给出最优方案。
1数学模型的建立及检出概率的计算方法
1.1巡检任务及盗油事件的数学描述
无人机携带摄像机进行巡检,任一时刻能观测到地面管线的长度范围设为r,如图1所示,图中θ为巡查视野所对应的视角。

图1无人机观测到地面的范围
Fig. 1Region detected by UAV
考虑一次单机单程巡检任务,假定无人机以巡航速度v=d/T匀速巡检,其中:d为无人机在单次巡检任务中覆盖的管道范围长度;T为单次巡检任务经历的时间。则无人机位置坐标范围x∈[0,d],巡检时间范围t∈[0,T]。以t为横坐标,x为纵坐标,建立如图2所示的数学模型。

图2无人机巡检任务的几何描述
Fig. 2Geometric illustration of UAV patrolling
巡检视野:粗实线OM′为无人机轨迹,OM′上下两条相距为r的细实线包围的面积为巡检视野。
盗油事件:设点A1(tA1,xA1)表示盗油事件在tA1时刻、距地面O点xA1的管线处发生;点A2(tA2,xA2)表示盗油事件在tA2时刻、距地面O点xA2的管线处结束。一般情况下盗油操作在原地完成,即xA1=xA2,盗油持续时间为τ,即tA2-tA1=τ。则线段A1A2表示一起常规盗油事件,同理B1B2也是一起盗油事件。
1.2盗油事件检出概率的计算方法

(1)

(2)
(3)
其中:h(ti,xj)为坐标(ti,xj)处发生盗油案件的概率;ΔSij为面元ij的面积。

(4)
令划分网格数目趋于无穷大,即n→∞,m→∞,同时保证ΔSi′j′→0。
(5)
由定积分的定义可知

(6)
式中:面积S′为所有能够使式(2)中条件概率值为1的面元i′j′的集合,记S′的集合为有效面积,其全部元素并集的面积为Se。图3中的阴影面积即为图2情形的有效面积。

图3能够被检出的盗油事件发生点的集合
Fig. 3Collection of detectable oil-stolen event
假设案发地点和时间相互独立,h(t,x)=f(t)g(x),其中:f(t)和g(x)分别为案发时间t和案发位置x的概率密度函数。再假设案发地点和时间服从均匀分布,即任何时刻、任何地点都有相同的可能性出现盗油案件。研究某次巡检任务,巡检范围x∈[0,d]和时间t∈[0,T],则概率密度函数为
(7)
代入式(6)得到
(8)
式(8)给出了巡检范围x∈[0,d]和时间t∈[0,T]内盗油案件等可能发生情况下事件检出概率的一般情形计算公式。
2单机单程巡检任务的讨论
2.1检出概率计算
计算图3中的有效面积,其为
Se=
(9)
式中:
(10)

由式(8)和式(9)可知,图3所示的单机单程巡检任务在指定巡检范围x∈[0,d]和时间t∈[0,T]内发现盗油案件的概率为
(11)
式中:P0为不考虑返程时单架无人机单程任务检出盗油事件的概率。若无人机执行单机往返任务,如图4所示,设去程OM′段覆盖范围也为x∈[0,d]、时间t∈[0,T],其有效面积与图3有所不同,式(11)变为
(12)
式中:P0,coh为考虑返程时单架无人机单程任务检出盗油事件的概率。

图4单机往返巡检任务
Fig. 4Round-trip patrolling scheme of single UAV
为保证在漫长的管线上,地面可疑人员和车辆图像辨识清晰,无人机视野范围r不能取得很大,则r/d通常是非常小的量:
(13)
忽略r/d,则式(11)和式(12)变为
(14)
(15)
2.2单机单程巡检方案的讨论
从式(11)和式(12)及式(14)和式(15)中可以得出如下结论:

r由巡航高度和搭载设备决定,视其为常量;τ由作案惯用手段和人群决定,可通过公安部门的盗油案件记录进行统计估计,将其视为常量。因此事件检出概率只与巡检范围d和巡检时间T有关。
令d=50 km,r=0.10 km,τ=0.25 h,则检出概率P随T的变化如图5所示。
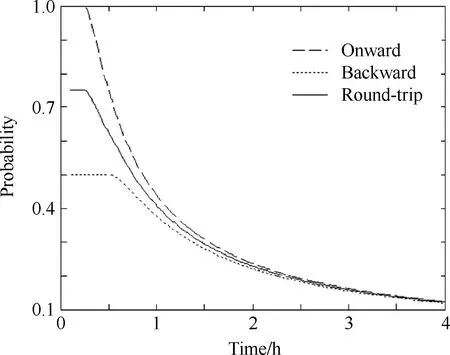
图5事件检出概率随巡检时间的变化
Fig. 5Variation of detection probability with patrolling time
可见,在一定范围内,T越小,巡检周期越小,巡检期间事件被检出的概率越大。而巡航速度v由d、T及巡检模式决定,反过来v的允许范围又限制了d、T及巡检模式。在令检出概率P尽可能大的目标下设计合理的d、T及巡检模式,即基于事件检出概率的无人机巡检方案研究的基本目标之一,下文将继续讨论。
2) 提高任务期间事件检出概率的手段。
① 提高τ,这要求管道在设计时增加防盗装置和保护外壳等,延长罪犯所需时间。
② 在保证摄像清晰度下,提高v,降低T。
③ 在一定巡航速度v下,降低巡检范围d,从而缩短T。这也说明单个无人机长距离巡检是低效的做法,在经济性允许的情况下应该尽可能将管道分成若干任务段,缩短每个任务段的长度。
2.3数学模型的蒙特卡罗验证
式(11)和式(12)分别给出了不考虑和考虑返程巡检时,单架无人机单程巡检的事件检出概率。为了检验该数学模型的正确性,采用蒙特卡罗方法进行模拟,将盗油事件的发生点视为随机坐标点:A(t,x),t∈[0,T],x∈[0,d],将点A随机投放500次,统计与巡检视野相交的盗油事件个数n0,则n0/500代表检出概率的模拟值,重复10次上述过程求平均以消减随机误差,得到模拟平均值P0,Monte。由式(11)和式(12)计算得出的理论结果,分别与图3和图4所示图形中的投点蒙特卡罗试验进行对照。
在r=0.1 km,d=50 km,τ=0.25 h的情况下,令T从0.1 h变化到2.0 h,得到对比结果如图6所示,图中点和圈表示蒙特卡罗模拟结果,实线表示式(11)给出的计算值,虚线表示式(12)给出的计算值。可见,数学模型与随机模拟有较好的吻合程度。
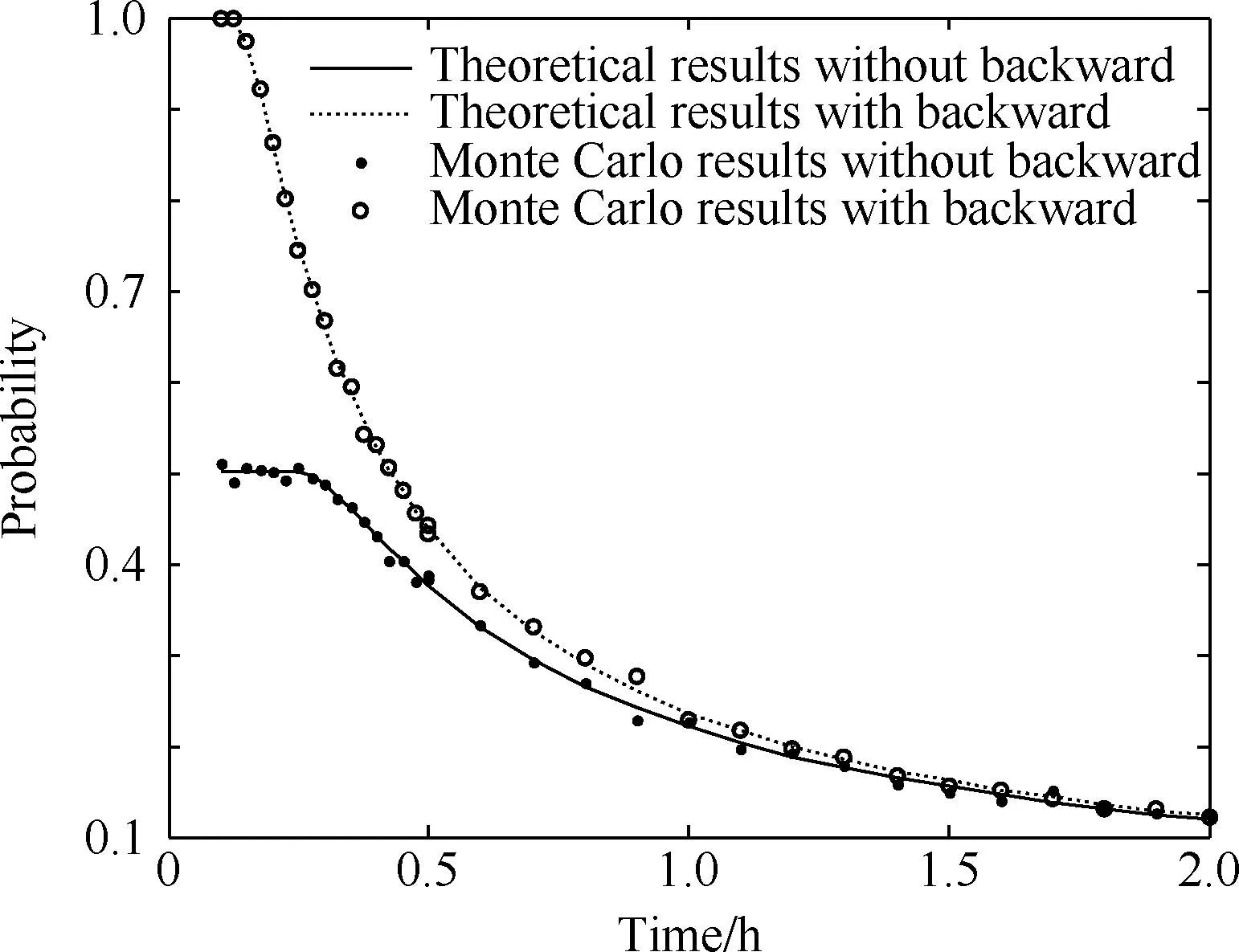
图6用蒙特卡罗模拟对数学模型进行验证
Fig. 6Verification of mathematical model by Monte Carlo simulation
3一般巡检任务的讨论
由2.1节的讨论可知,可以忽略r/d,延续2.1节对概率密度均匀分布的假设,则单个无人机单程任务的概率由式(11)和式(12)给出。通常的无人机巡检方案可以拆分成3种任务模式的组合,分别是单架无人机多次巡检、多架无人机多次巡检和多架无人机分段多次巡检。下面分别讨论这些一般情形的任务模式。
3.1单架无人机多次巡检任务
考虑单个无人机在x∈[0,d]和t∈[0,T]范围内进行N次匀速往返巡检:包括2N个单程,每个单程内x∈[0,d],时间t∈[0,T/2N];前2N-1个单程的检出概率为P0,coh,最后一个单程的检出概率为P0,如图7所示。事件检出概率为
(16)
式中:
(17)
此任务下无人机的巡航速度应该达到
(18)
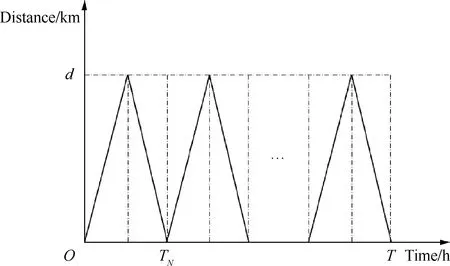
图7单个无人机执行N次巡检任务
Fig. 7Scheme of single UAV patrolling N times
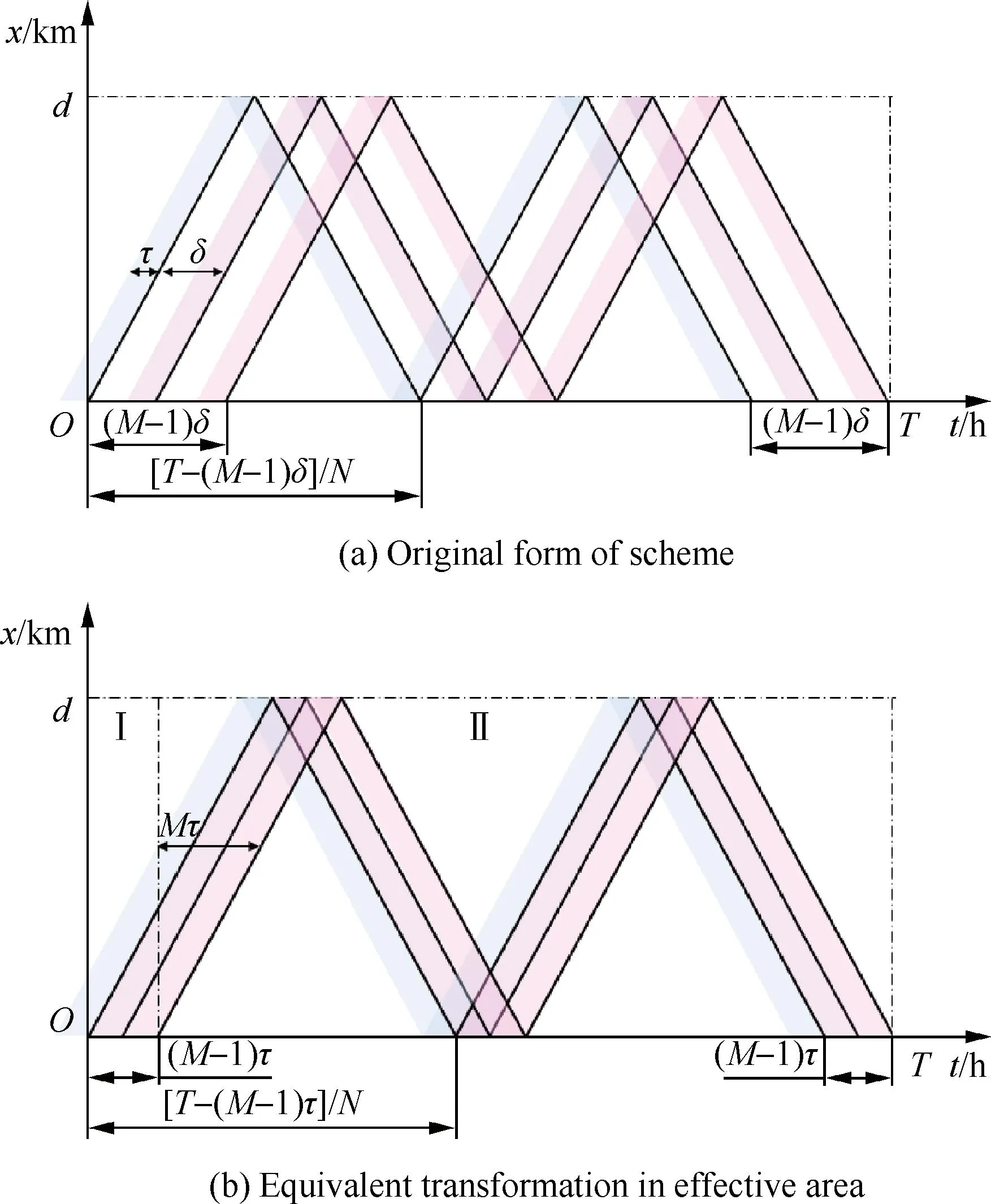
图8M架无人机执行N次巡检任务
Fig. 8Scheme of M UAVs patrolling N times
3.2多架无人机多次巡检任务
考虑M架无人机以等间隔δ出发往返N次进行巡检,第一架无人机在t=0时刻出发,最后一架无人机在t=T时刻收回,巡检范围x∈[0,d]。当δ>τ,即每架无人机的巡检有效面积之间有间隙时,减小δ直至δ=τ,不会改变有效面积大小,如从图8(a)变为图8(b),且在d相同的情况下图8(b)有更小的巡航速度,故在本文的M架无人机任务中,一律令δ=τ。若T过小,δ=τ会使第M架无人机第一次往返的去程与第一架无人机第二次往返巡检的返程干涉,此时减小δ使干涉恰好消失,则计算模型仍然成立。即:δ≤τ,且δ尽量取大,可得到M架无人机最大检出概率。
图8所示模型的概率可分为两部分计算,其总面积分别为SI和SII,有效面积分别为SeI和SeII。第一部分的有效面积为
(19)
式中:T″=T′/2N-τ;T′=T-(M-1)τ;k=2Nd/T′。第二部分有效面积形式上和单个无人机多次巡检模式相同,可利用单架无人机巡检的结论,即
SeII=PN(N,T′,Mτ)dT′
(20)
得出总概率为
(21)
由式(19)~式(21)可得,M架无人机进行间隔为δ的N次往返巡检任务的检出概率为
(22)
(23)
3.3多架无人机分段多次巡检任务
设∑Mi架无人机将0~d的距离范围划分成了Q段,第i段长度为di,该段内执行Mi架无人机往返Ni次巡检任务,检出概率为Pi,如图9所示。
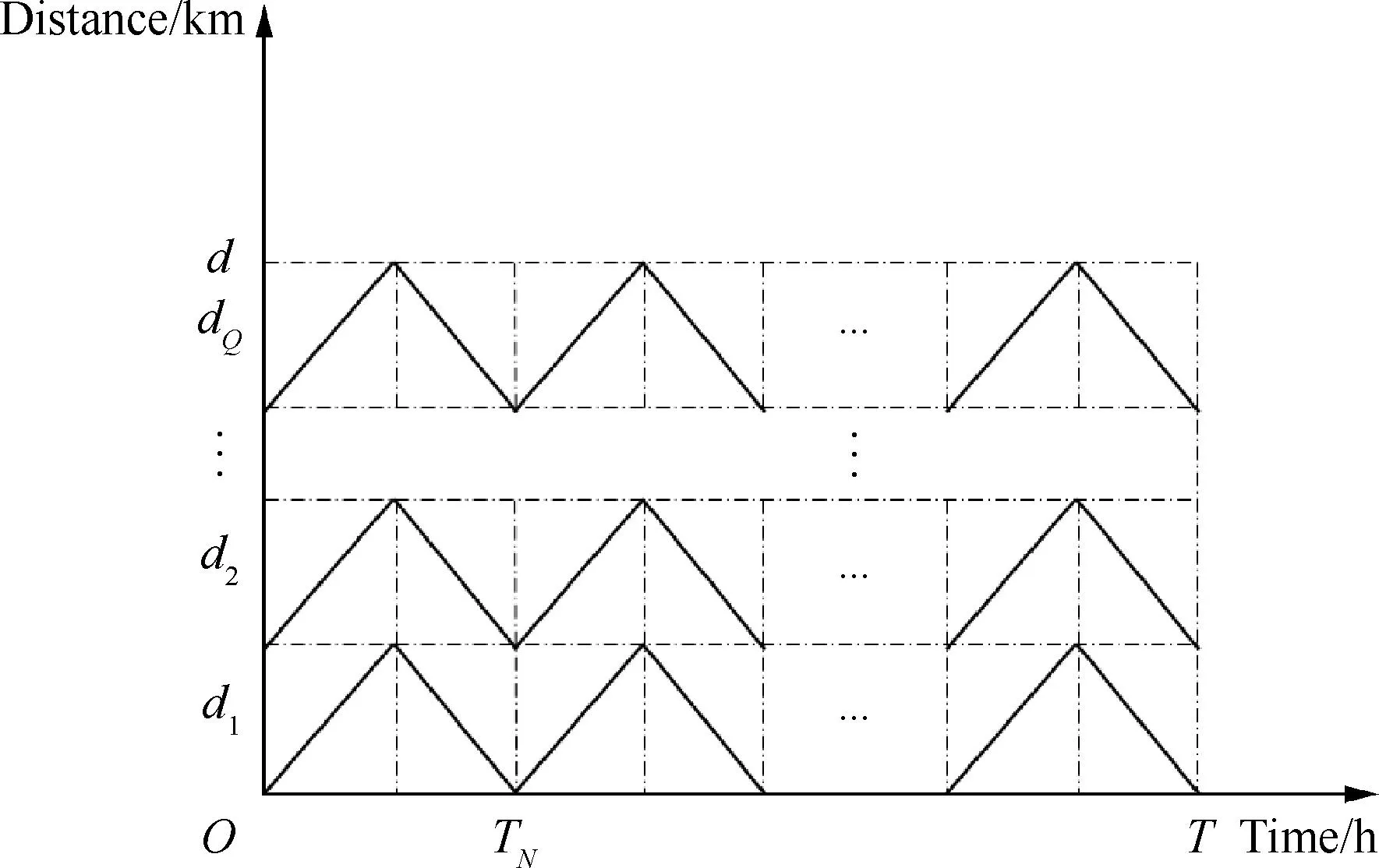
图9Q个任务段下M架无人机执行N次往返巡检任务
Fig. 9Scheme of M UAVs round-trip patrolling N times with Q scheme segments
事件检出的概率为
(24)
式中:
(25)
每个任务段的巡航速度为
(26)
3.4小结
在巡检范围x∈[0,d]和巡检时间t∈[0,T]内,无人机一般巡检任务有如下结论:
1) 单架无人机往返N次巡检,检出概率PN(N,T,τ)见式(16),巡航速度vN见式(18)。
2)M架无人机往返N次巡检,每架次间隔δ≤τ,且δ尽量取大,检出概率P(M,N,T,τ)见式(22),巡航速度vM见式(23)。
3)x∈[0,d]分为Q段,每段内检出概率由小结1)和小结2)计算出为Pi,则总检出概率PQ见式(24),巡航速度vQ i见式(26)。由式(24)还可知,若分段后每个任务段巡检模式完全相同,则分段不改变检出概率,相当于不分段采用相同的巡检模式,但巡航速度会有所改变。
4基于事件检出概率的巡检方案设计
第1~3节建立了事件检出概率的数学模型,对于给定的巡检时间T、任务模式(M,N),能够计算出事件检出概率P。一方面,巡检时间T和任务模式(M,N)的选取与无人机的性能(如航时、巡航速度等)紧密相关;另一方面,无人机初步设计的依据又来自于巡检任务。总体设计和方案设计紧密关联。本节主要介绍考虑总体设计结果后,基于事件检出概率设计出最优方案的方法。
4.1方案设计总体思路
1) 分析任务明确需求,进行无人机概念设计,提出大致的初始设计参数。
2) 通过质量平衡和功率平衡迭代分析,得出起飞重量,完善总体设计参数,估算无人机航时TUAV。
3) 根据航时设计合理的巡检范围T,利用第1~3节的数学模型计算事件检出概率P,基于事件检出概率挑选合理任务模式。
4) 根据总体设计结果和性能计算,得出无人机巡航速度v,代入第3)步给出的合理任务模式计算巡检范围d,从而给出完整的合理任务模式。
5) 对所有合理任务模式进行对比分析,挑选出适用于不同情形的最优方案,完成方案的优化设计。
有关无人机总体设计的第1)和第2)步将在第5节阐述,本节进一步阐述前3节的事件检出概率模型,并将其应用于方案设计,即第3)和第4)步。第6节给出了该两步的实际算例。第5)步的方案优化设计方法也将在本文第6节中通过实际算例进行介绍。
4.2合理方案的制定
由上文讨论可知,当认为r/d为一小量而忽略不计时,检出概率只与τ/T有关。τ可通过管线范围内历史盗油案件统计值得到,这里按τ=0.25 h计算。T的选取要从两方面考虑,对于整个任务Tsys,应该覆盖盗油案件可能的全部时间范围,没有统计数据下取为24 h;但对于单个任务组Tm,则应该根据无人机总体设计和当前能源方式而确定。对于低空巡航且采用常规能源的无人机,通常难以达到昼夜持续飞行的航时,即Tm 根据管道的风险管理评估,一般可以人为给出一个概率值Pd,要求保证在无人机巡检任务期间,一旦盗油案件发生,则被检出的概率P应满足P>Pd,从而确定给定T和Pd下的所有合理任务模式(M,N)|T,Pd 图10给出了在T=24 h下不同任务模式的检出概率。图11给出了这些任务模式中,达到不同风险管理规定给出的Pd且往返次数N最小的任务模式。 图10反映出当无人机数量M过小时,概率曲线随每架往返巡检次数N的增长缓慢,达到期望检出概率Pd所需N过大,可行性较低。而当无人机数量M过大时,概率曲线随M增加而产生的变化减小,再过分增加M收益变小。故M的取值应合理。 当Pd确定时,(M,N)组合曲线可查出,以Pd=0.90为例,(M,N)组合如表1所示。 图10T=24 h下不同任务(M, N)的检出概率 图11T=24 h下的不同要求概率Pd下的任务(M, N) 表1T=24 h、Pd=0.90下的合理任务(M,N)|T,Pd Table 1Reasonable scheme (M,N)|T,PdwithT=24 h, Pd=0.90 M12345678N673322171412109MN6766666870727072 从表1可以看出,给定T和Pd下的合理任务模式中,当M增大时N趋于减小,但MN的变化趋势是不确定的。并且,评判一个方案不能单纯从MN的大小出发,应考虑任务效能和效率等多个因素,具体分析将在第6节介绍。 4.3巡检范围的确定 确定任务模式(M,N)及巡航时间T后,可以根据无人机巡航速度v确定巡检范围d,确定其关系的数学依据为式(23),所得结果如图12所示。 图12不同任务(M, N)下巡航速度v和巡检范围d的关系 由式(23)可知,v随d的变化虽然是线性的,但其斜率同时受M、N、T和τ的影响,斜率的变化在M增大时是不确定的。 同时还可以发现,由于时间T=24 h取得非常大,使得MN很大且在很小的巡检范围d时巡航速度v就达到很高的值,对于小型无人机,如果T=24 h,d很难超过30 km,否则无人机速度将达到150 km/h以上。这也说明适当减小单组任务范围,对过长距离、过长时间跨度的巡检任务进行分段在方案设计中具有重要意义。 在保证给定的Pd下T最大能取多少,不同T对应的巡检范围d应定为多少,将和无人机总体设计相互联系考虑。 5管线巡检无人机总体设计 本节介绍无人机总体设计。总体设计最初依据来自任务本身,设计结果又返回任务的方案设计,总体设计将给出方案设计最主要的约束。 5.1无人机总体参数初取 管线巡检无人机执行的任务特殊性要求其应具有一定的隐蔽性,考虑到其设计巡航速度不高、巡航高度较低的具体情况,在选择能源类型时应该避开振动、噪声较大的内燃机和各种涡轮发动机。同时,低碳经济和环保意识是当今全球能源日益紧张局势下的必然趋势[13-14],因此对于执行管线常规巡检任务的无人机,本文采用电能。 电能的获取有多种途径,常见的有蓄电池、燃料电池和太阳能。我国管线覆盖范围十分辽阔,盗油案件发生时间又极为不确定,因此在保证期望事件检出概率的基础上应追求尽可能大的覆盖时间和空间范围。单纯的高空长航时太阳能无人机可以达到昼夜不停地飞行,但其高度决定对摄像设备的要求非常高,而在低空受气候影响较大,其可靠度非常低。因此,现有技术下,蓄电池和燃料电池,或两者混合使用将是管线巡检无人机能源上的最好选择。 当前技术下,电池供电的无人机功率很难超过内燃机和涡轮发动机,能源方式的选择确定了单个或单组无人机不应追求过分高的航时航程,定位为中小型号,起飞质量m在十几kg左右,总体设计中初始估计为m=15 kg。 无人机的任务剖面非常简单,基本只有起飞、巡航和降落3个环节,对机动性较低的要求和航时航程尽量大的思路确定了无人机应达到中上水平的升阻比,侧重低速性能。在总体设计中,升阻比K初估为15,展弦比λ初估为15。 在没有较多执行类似任务的特殊布局无人机提供经验数据的情况下,本文暂定无人机为常规布局,近似矩形机翼,展长l=3 m,巡航升力系数控制在CL=0.8左右,巡航高度H在500 m之内或略高于此,大气密度ρ取1.167 kg/m3。 5.2无人机总体设计 总体设计采用功率平衡和质量平衡循环迭代的方法。 1) 功率平衡 由已经得到的质量估算值计算飞机所需功率,根据平衡方程计算能源系统所提供的功率,修正原功率估算值。 飞机平飞状态下重力mg和升力L平衡,推力F和阻力D平衡,有 (27) 则巡航需用功率为 (28) 考虑到式(27)及λ=l2/c(c为弦长),平飞需用功率Plev可表示为质量和概念设计阶段参数的函数,即 Plev=m1.5Cplane (29) 式中: (30) 则平飞时推进装置输出的功率为 (31) 式中:ηprop为推进装置的效率,由于齿轮减速和部件摩擦等因素,ηprop<1。 设机载设备(摄像设备、通讯和自动驾驶等)消耗的功率为Pload,则平飞巡航时能源系统提供的总功率为 (32) 式中:ηload为载荷设备的效率,由于电路降压和元件阻耗等因素,ηload<1。 巡航状态下近似认为式(27)~式(32)的参数稳定不变,因此巡航总能量为 Eelec=PelecTUAV (33) 2) 质量平衡 由已经得到的各功率和能量参数,通过数学模型或统计模型估算无人机各部分质量,其中能源系统和推进系统根据其输出功率和能量值估算质量。最终修正质量估算值。 无人机起飞质量可表示为 m=mstru+mload+mpower+mprop (34) 结构质量mstru:对于几kg级别的无人机,结构质量占起飞质量的比例fstru=mstru/m为0.25~0.35[13, 15],随着m的增大,fstru普遍具有减小趋势[15],故对于本文讨论的15 kg左右的无人机,取fstru=0.25。 载荷质量mload:主要包括任务载荷和飞行设备载荷。任务载荷在本文中为摄像设备,取为2 kg;飞行载荷取为1 kg。因此mload=3 kg。 能源系统质量mpower:能源系统规模与其提供的功率和总能量正相关,通过建立模型或数据统计,一般可以建立能源系统质量的估计方法, 即 mpower=fpower(Pelec,Eelec,T) (35) 式(35)的具体计算方法将在5.3节讨论。 推进系统质量mprop:与上类似,一种精度不高但可行的估算方法为[16] mprop=kpropPelec.prop (36) 式中:参数kprop=0.008 kg/W。由式(34)~式(36)可根据功率估算质量。功率和能量依次计算循环迭代,直至得到收敛的起飞质量。 5.3能源系统质量估计方法 本节对于燃料电池和蓄电池分别给出式(35)的具体计算方法。由于不是本文重点,本节将只给出结论并注明引用出处。 1) H2燃料电池 H2燃料电池分为两大部分:储气罐和燃料电堆。储气罐储存H2并输出,与外界空气混合后输出给燃料电堆;燃料电堆负责将化学能转换为电能。一般而言,储备越多质量H2,所需储存设备的规模越大,储气罐质量越大,因此,储气罐质量与H2质量相关,即与释放总能量Eelec相关;同理,燃料电堆的质量与释放能量速率,即功率Pelec相关。文献[17]给出了千瓦级别燃料电池质量和功率的关系,文献[13]对数据进行拟合给出了如式(37)所示的关系。 (37) 储气罐质量估计为 (38) 因此采用燃料电池时,能源系统的质量为 mpower=mstack+mH,tan (39) 对于十几kg级的无人机,氢气消耗量约为几十g[13],燃料质量的变化非常小,可以忽略。故认为燃料系统质量不变。 2) 蓄电池 根据试验数据绘出蓄电池的Ragone图[16],得到单位质量的蓄电池在时间t内能释放的能量e和该段时间内平均功率σ的关系曲线e=f(σ),再画出e=Tσ直线,两者交点即给定航时T下电池的参数e(W·h/kg)和σ(W/kg)[18],于是采用蓄电池时,能源系统的质量为 (40) 实际中还可采取两种电池混合使用的方法,本文主要讨论基于事件检出概率的方案设计和无人机总体设计之间的关系,故不在此多讨论,为简明起见,采用H2燃料电池作为唯一能源,能源系统质量由式(37)~式(39)计算。 5.4起飞质量和航时的确定 首先假定一个航时TUAV,给定初始质量m0,由式(29)~式(39)可迭代计算H2燃料电池供能下的无人机质量m。若迭代不收敛,则表明无法达到给定航时,这是由于飞机总体参数、升阻比等性能参数、电池性能和质量关系曲线等共同影响,从而导致m迭代算法中的参数不合适,迭代发散。 由式(29)~式(39)可以写出最终的迭代表达式为 (41) 式中: (42) 需要注意的是,一般情况下式(41)是不能写成显式表达式的,本文中纯H2燃料电池供能下,式(29)~式(39)均有明确的表达式,且fstru为常数,故能写出显式表达式。另外,若由于无人机、电池参数不合适,可能使得式(41)无解,这就是上文所述的迭代不收敛的情况。 逐步改变TUAV最终得到可以收敛的稳定起飞质量m,则T-m曲线表明了一系列可行的航时、起飞质量方案。通过T-m曲线还可以找出当前设计下的单机最大航时TUAV,max。 对于本文讨论的情况,迭代结果如图13所示。 图13无人机航时和起飞质量迭代结果 迭代收敛的条件为:无人机航时TUAV≤4.66 h,即无人机最大航时为TUAV,max=4.66 h,该值也是单个或单组无人机执行任务能够覆盖时间范围T的最大值。在收敛范围内,每个TUAV对应两个质量m1和m2(m1>m2),且当TUAV→TUAV,max时,m1和m2趋于相同的值:16.45 kg。即,起飞质量为16.45 kg时无人机航时达到最大,为4.66 h。 6算例:巡检方案设计、优化及分析 6.1方案设计 第5节通过现有能源系统和无人机概念设计参数得出单个无人机最大航时TUAV,max,无人机群覆盖的巡检时间范围T与无人机架数M有关:Tm≥TUAV,Tm,max≥TUAV,max。将保守值TUAV,max作为设计巡检范围,代入第4节所述方法中确定巡检方案。 假定期望检出概率Pd=0.9,T=TUAV,max=4.66 h得可行方案(M,N)如图14所示。 图14T=4.66 h下不同任务(M, N)的检出概率 由式(27)得到总体设计给出的巡航速度为 (43) 与第4节图12方法相同,做出可能方案下巡航速度v与巡检范围d的关系图如图15所示。为满足给定巡航速度vcur,不同方案(M,N)对应不同的距离d。 图15T=4.66 h下不同要求概率Pd下的任务(M, N) 至此,已经给出满足要求的完整备选方案组如表2所示,这些方案同时满足如下条件:①每个无人机航时TUAV、巡航速度v均满足当前总体设计和能源系统,平飞巡航下质量方程和功率方程平衡;②事件检出概率P在巡检范围x∈[0,d]、时间t∈[0,T]内大于要求检出概率Pd;③无人机航时TUAV达到最大值。 表2算例中根据总体设计和概率模型得出的合理方案 Table 2Reasonable scheme according to conceptual design and probabilistic model in example MNMNd/km1141414.373271427.206351535.929441642.213531552.685631849.086732145.488832441.889921857.4351022052.034 6.2方案优化及分析 进一步做出方案对比分析图像。图16反映了不同任务下平均每架无人机巡检范围(PDU)和平均每架次无人机巡检范围(PDS),用以反映方案效率和经济性;图17直接反映了不同方案巡检的总距离,从中可以直接选出最大巡检距离的方案。 图16单位无人机及单位无人机总架次下的巡检范围 图17最大巡检距离和总架次数与无人机总架数的关系 最终可以选出4种优化方案:t∈[0,T] ① 功效型(巡检范围最大方案),9架无人机,每架2次往返巡检。此方案适合布置于大范围均匀盗油发生的区域内,以覆盖尽量大的面积为目的。 ② 综合型(每架次巡检范围最大方案),5架无人机,每架3次往返巡检。此方案综合性较强,以单位架次无人机获得最大巡检效果为目标。 ③ 针对型(每架巡检范围最大方案),1架无人机,巡检14次。此方案巡检范围最小,但需要无人机数目最少,适合用于盗油案件高频发生的某些特殊小区域重点防护。 ④ 经济型(总架次数最小方案),5架无人机,每架3次往返巡检。此方案着重考虑方案实行的经济性,以尽可能减少无人机起落、增多标准巡航模式所占比例。 在本文给出原始数据的计算中方案④恰巧和方案②重合。4种方案各自优劣势对比如图18所示。 图18不同类型最优方案的雷达图 无特殊要求时,可选取综合型。5架无人机每架往返3次,可在4.66 h(约4 h 40 min)内巡检约52.7 km长的管线,在巡检时间空间范围内只要有盗油案件发生,便有至少Pd=90%的检出概率。 以上布置为一个工作组,若实际需要巡检的时间大于4.66 h或空间大于52.7 km,可以布置多个工作组以保证完全覆盖。例如,对于夜间盗油高发、长约100 km的管线范围,应布置至少2个工作组,并为每个工作组设置工作站用以传回监控视频,供工作人员监视管线安全。 7结论 1) 由于盗油案件的特殊特点,设计无人机巡检系统只需考虑高频发生位置附近一定距离范围[0,d]、高频作案时间附近一定时间范围[0,T],在此范围内发生盗油案件的概率分布可视为均匀分布。 2) 无人机往返巡检,事件检出概率P只与巡检视野与巡检距离范围之比r/d、盗油所需时间与巡检时间范围之比τ/T有关,通常r/d可忽略,P随τ/T增大而增大直至趋于常数。 3) 在距离[0,d]、时间[0,T]内的无人机巡检系统可以由3种任务模式组合而成:单机多次巡检(N)、多机联合巡检(N、M)、多机分段巡检(Q)。通常需要3种模式组合的复杂方案才能实现总无人机数最少情况下实现要求,方案需要科学的方法进行设计和优化。 4) 无人机概念设计以任务需求为背景。在一定能源能力和初始概念设计参数下,通过质量平衡和能量平衡迭代的总体设计,可以给出无人机能力范围内的航时TUAV和巡航速度vcur。 5) 于事件检出概率模型,由无人机航时TUAV可以制定出满足检出概率要求Pd的合理方案(M,N),再根据巡航速度vcur可以制定合理的巡检范围d。 6) 对合理方案进行对比分析,可以筛选出最合理的4种类型的最优方案,分别是功效型(巡检范围最大方案)、综合型(每架次巡检范围最大方案、每架巡检范围最大方案)和经济型(总架次数最小方案)。 7) 针对不同的任务需求、能源系统能力和无人机概念方案,可以根据本文所述方法,结合总体设计结果,在基于时间检出概率的基础上给出无人机管线巡检方案设计,并得出不同类型的最优方案以供斟酌采纳。 参考文献 [1]LI L J, AN J Y, ZHOU L. The study and realization of grading modeling risk assessment for buried gas pipline[J]. Advanced Material Research, 2014, 945-949: 2944-2953. [2]李炜, 朱芸. 长输管线泄漏检测与定位方法分析[J]. 天然气工业, 2005(6): 105-109. LI W, ZHU Y. Leakage detection of oil and gas pipelines by transient model[J]. Natural Gas Industry, 2005(6): 105-109 (in Chinese). [3]HUANG Y, ZHOU Z, JIA X. A leakdetection method based SCADA system[C]∥Proceedings of the 4th International Symposium on Measurement Techniques for Multiphase Flows (ISMIMF’2004). Beijing: China Academic Journal Eelectronic Publishion House, 2004: 627-632. [4]ELLIS N. Inspection of power transscheme lines using UAVs[D]. Toowoomba: University of Southern Queensland,2003: 1-29. [5]BRUGGEMANN T S, FORD J J, WALKER A R. Control of aircraft for inspection of linear infrastructure[J]. IEEE Transactions on Control Systems Technology, 2011, 19(6): 1397-1409. [6]孙泽民, 王建宏. 长输管道管理现状分析及其对策[J]. 安全、健康和环境, 2007(9): 37-38. SUN Z M, WANG J H. Current states analysis and counter-measures of long pipeline management[J]. Safety Health & Environment, 2007(9): 37-38 (in Chinese). [7]陈振友. 输油管线打孔盗油作案的特点分析及防范措施[J]. 石油库与加油站, 2010(3): 12-14. CHEN Z Y. Analysis on the features of oil stealing crime by drilling hole on pipeline and discussion on the prevention measures[J]. Oil Depot and Gas Station, 2010(3): 12-14 (in Chinese). [8]赵述合, 张权, 叶辉. 浅谈管道打孔盗油形式及防范[J]. 今日科苑, 2009(2): 86. ZHAO S H, ZHANG Q, YE H. Briefly discussion of the form of oil stealing by drilling hole and its protection[J]. Today’s Families, 2009(2): 86 (in Chinese). [9]常文见, 孟凡辉, 王仓, 等. 无人机遥感技术在长输管道中的应用探讨[J]. 价值工程, 2013(32): 197-198. CHANG W J, MENG F H, WANG C, et al. Application of UAV remote sensing technology in the long-distance pipeline[J]. Value Engineering, 2013(32): 197-198 (in Chinese). [10]李器宇, 张拯宁, 柳建斌, 等. 无人机遥感在油气管道巡检中的应用[J]. 红外, 2014(3): 37-42. LI Q Y, ZHANG Z N, LIU J B, et al. Application of UVA remote sensing in oil and gas pipeline inspection[J]. Infrared, 2014(3): 37-42 (in Chinese). [11]夏国清, 陈红召, 王元慧. 基于闭排队网络的飞机出动架次率分析[J]. 系统工程学报, 2011(5): 686-693. XIA G Q, CHEN H Z, WANG Y H. Analysis of aircraft sortie generation rate based on closed queueing network model[J]. Journal of System Engineering, 2011(5): 686-693 (in Chinese). [12]SARMA V V S, RAMCHAND K, RAO A K. Queuing models for estimating aircraft[J]. IEEE Transactions on Reliability, 1977, 26(4): 253-256. [13]李延平. 太阳能/氢能混合动力小型无人机总体设计[D]. 北京: 北京理工大学, 2014: 3-12, 60-65, 101-104. LI Y P. Conceptual design of solar/hydrogen hybrid powerd samll-scale UAV[D]. Beijing: Beijing Institute of Technology, 2014: 3-12, 60-65, 101-104 (in Chinese). [14]张秦岭, 黄建, 刘晓倩. 长航时太阳能无人机总体设计方法和分析[J]. 空军工程大学学报: 自然科学版, 2014, 15(2): 12-15. ZHANG Q L, HUANG J, LIU X Q. General design method and analysis of long endurance solar powered UAV[J]. Journal of Air Force Engineering Unversity: Natural Science Edition, 2014, 15(2): 12-15 (in Chinese). [15]RAYMER D P. Aircraft design: A conceptual approach[M]. Reston: AIAA Inc., 1992: 12-14. [16]NOTH A. Design of solar powered airplanes for continuous flight[D]. Suisse: Ecole Polytechnique Fédérale de Lausanne, 2008: 20-29, 37-63. [17]OFOMA U C, WU C. Design of a fuel cell powered UAV for envirnomental research[C]//AIAA 3rd“Unmanned Unlimited” Technical Conference, Workshop and Exhibit.Reston: AIAA, 2004: 7-8. [18]刘斌, 马晓平, 王和平, 等. 小型电动无人机总体参数设计方法研究[J]. 西北工业大学学报, 2005, 23(3): 396-400. LIU B, MA X P, WANG H P, et al. Design analysis methodology for electric powered mini UAV[J]. Journal of Northwestern Polytechnical University, 2005, 23(3): 396-400 (in Chinese). 王翔宇男, 博士研究生。主要研究方向: 飞行器设计。 Tel: 010-82327539 E-mail: wangxyflying@163.com 王跃男, 学士。主要研究方向: 飞行器设计与工程。 E-mail: 1054657138@qq.com 鲍蕊女, 博士, 副教授, 博士生导师。主要研究方向: 飞行器结构完整性。 Tel: 010-82314957 E-mail: rbao@buaa.edu.cn 蒋崇文男, 博士, 讲师。主要研究方向: 飞行器气动布局设计、高超声速空气动力学。 Tel: 010-82315396 E-mail: cwjiang@buaa.edu.cn 万志强男, 博士, 教授, 博士生导师。主要研究方向: 飞行器气动弹性、飞行器总体设计、飞行器结构设计。 Tel: 010-82338723 E-mail: wzq@buaa.edu.cn Received: 2015-09-09; Revised: 2015-10-12; Accepted: 2015-10-26; Published online: 2015-11-0417:21 URL: www.cnki.net/kcms/detail/11.1929.V.20151104.1721.002 html Foundation items: Fundamental Research Funds for the Central Universities (YWF-14-HKXY-006); “Fanzhou” Educational Funds Conceptual design for long-distance pipeline patrolling UVA based on detection probability of patrolling scheme WANG Xiangyu, WANG Yue, BAO Rui*, JIANG Chongwen, WAN Zhiqiang School of Aeronautic Science and Engineering, Beihang University, Beijing 100191, China Abstract:The frequent occurrence of man-made oil-stolen events is one of the most severe threats for the security of pipelines. The unmanned aerial vehicle (UAV) patrolling system is able to monitor long-distance pipelines with high efficiency and flexibility despite the various terrain. Therefore, a probabilistic model on mathematics is established to quantify the factors that affect the detection probability. Methods that can boost the detection probability is proposed. Detection probabilities in different modes of patrolling scheme and of its combination are figured out. The method of scheme designing based on the task of mission is summarized with the cooperation of the UAV conceptual design. Finally, the optimal scheme is devised based on the detection probability. Key words:pipeline; detection probability; probabilistic model; UAV conceptual design; schematic design *Corresponding author. Tel.: 010-82314957E-mail: rbao@buaa.edu.cn 作者简介: 中图分类号:V37 文献标识码:A 文章编号:1000-6893(2016)01-0193-14 DOI:10.7527/S1000-6893.2015.0286 *通讯作者.Tel.: 010-82314957E-mail: rbao@buaa.edu.cn 基金项目:中央高校基本科研业务费专项资金 (YWF-14-HKXY-006); “凡舟”教育奖励基金 收稿日期:2015-09-09; 退修日期: 2015-10-12; 录用日期: 2015-10-26;网络出版时间: 2015-11-0417:21 网络出版地址: www.cnki.net/kcms/detail/11.1929.V.20151104.1721.002.html 引用格式: 王翔宇, 王跃, 鲍蕊, 等. 基于巡检方案事件检出概率的长距管线无人机总体设计[J]. 航空学报, 2016, 37(1): 193-206. WANG X Y, WANG Y, BAO R, et al. Conceptual design for long-distance pipeline patrolling UVA based on detectable probability of patrolling scheme[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 193-206. http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn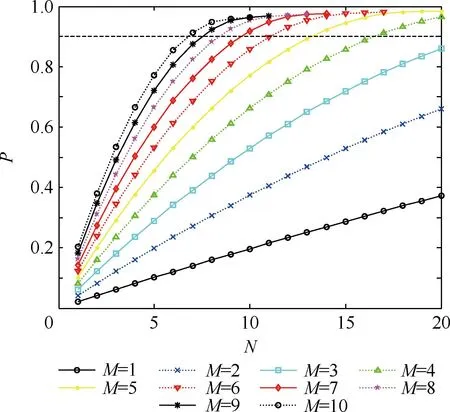
Fig. 10Detection probability of various scheme (M, N) under T=24 h
Fig. 11Scheme (M, N) under various design prabobility Pdfor T=24 h
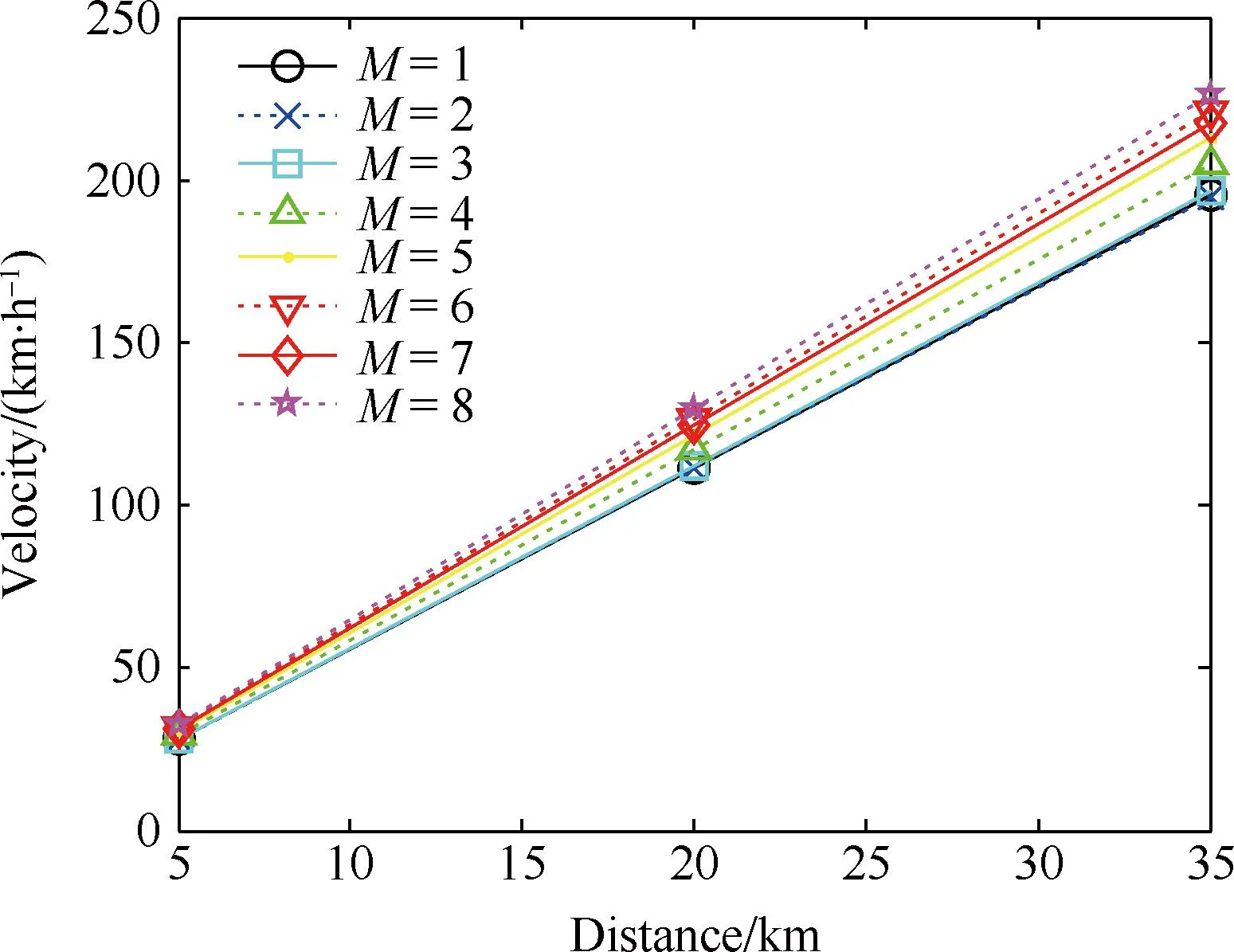
Fig. 12Relationship between cruise velocity v and patrolling distance d with different scheme (M , N)

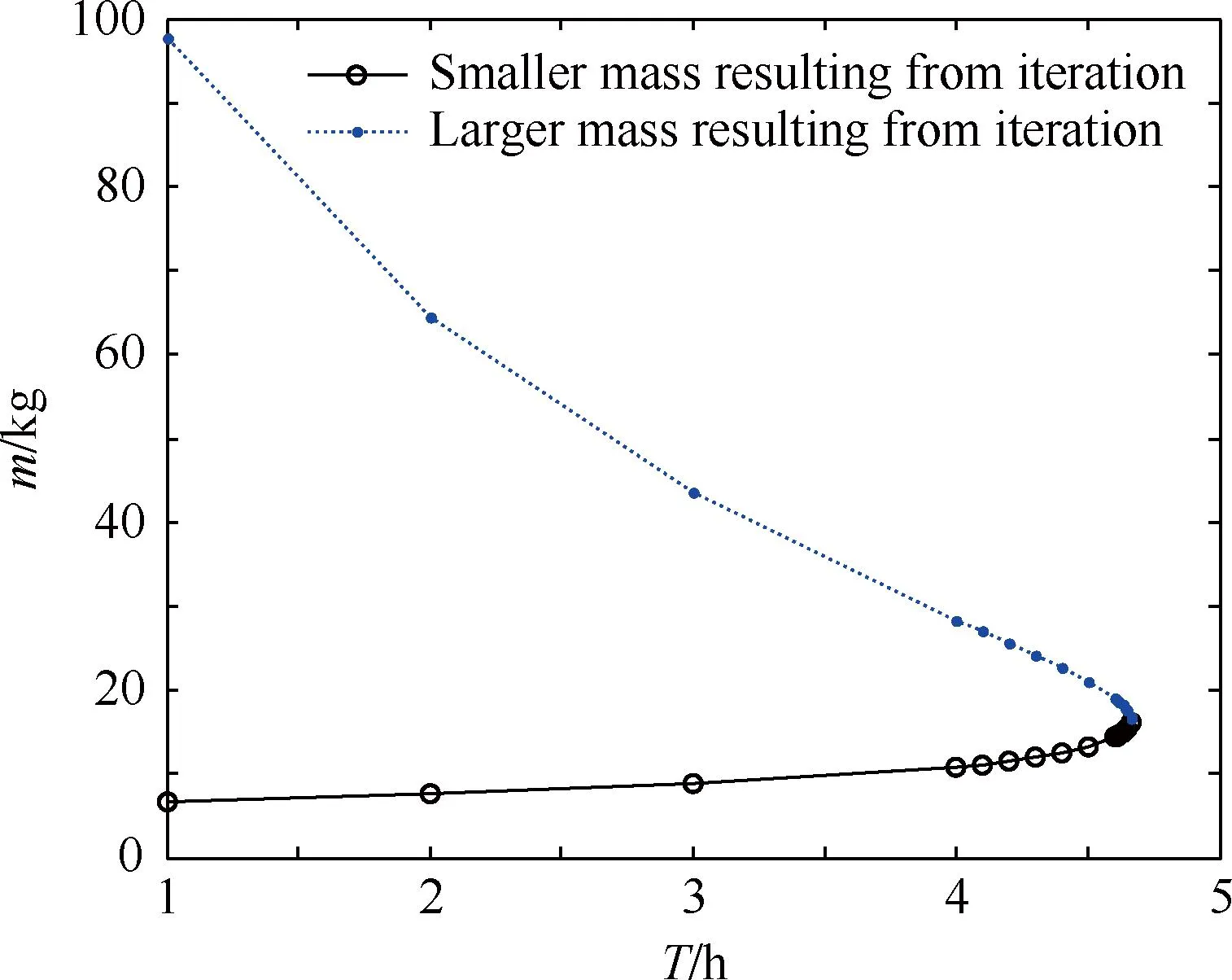
Fig. 13Iteration results of UAV endurance and
take-off mass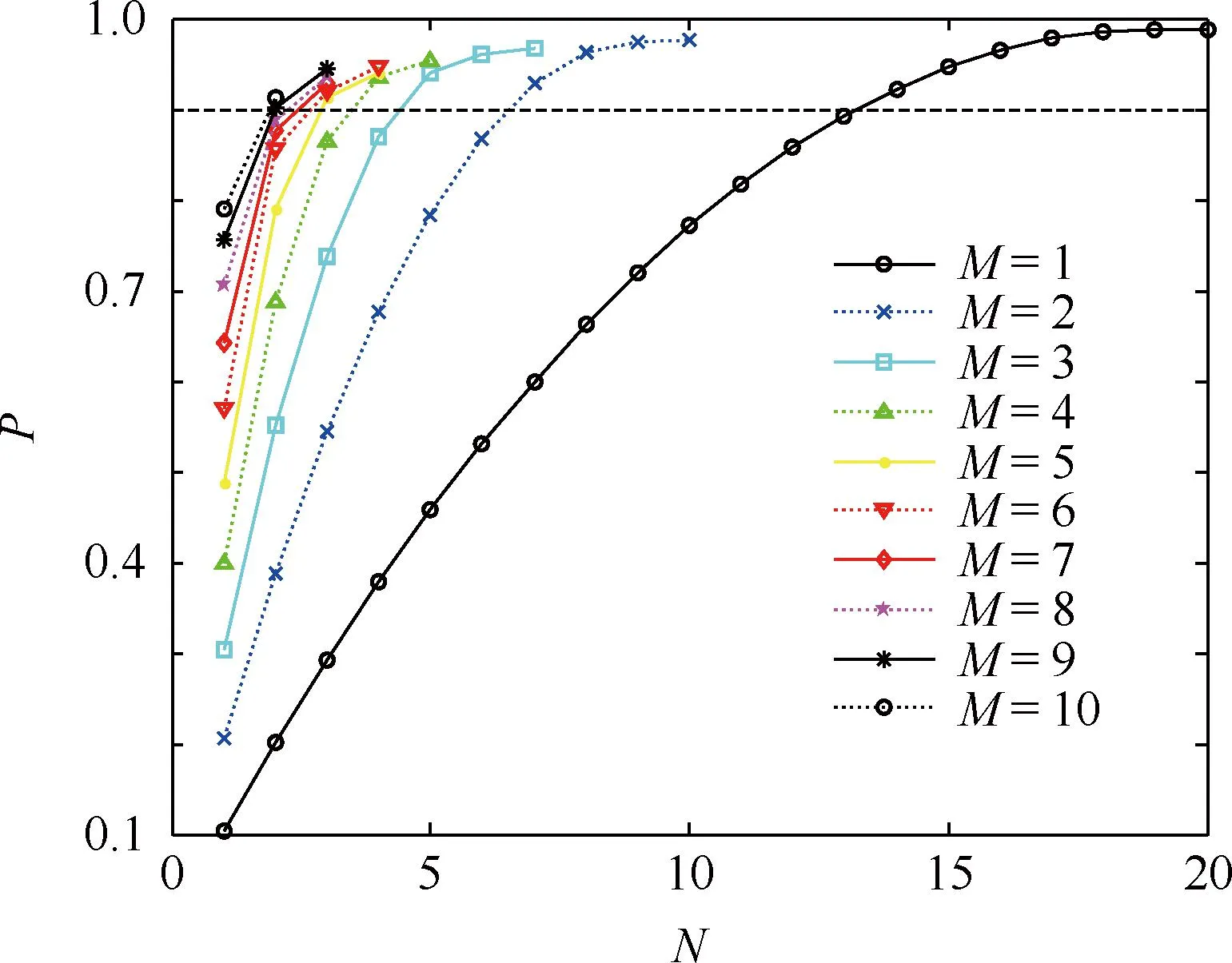
Fig. 14Detection probability of various scheme (M, N) under T=4.66 h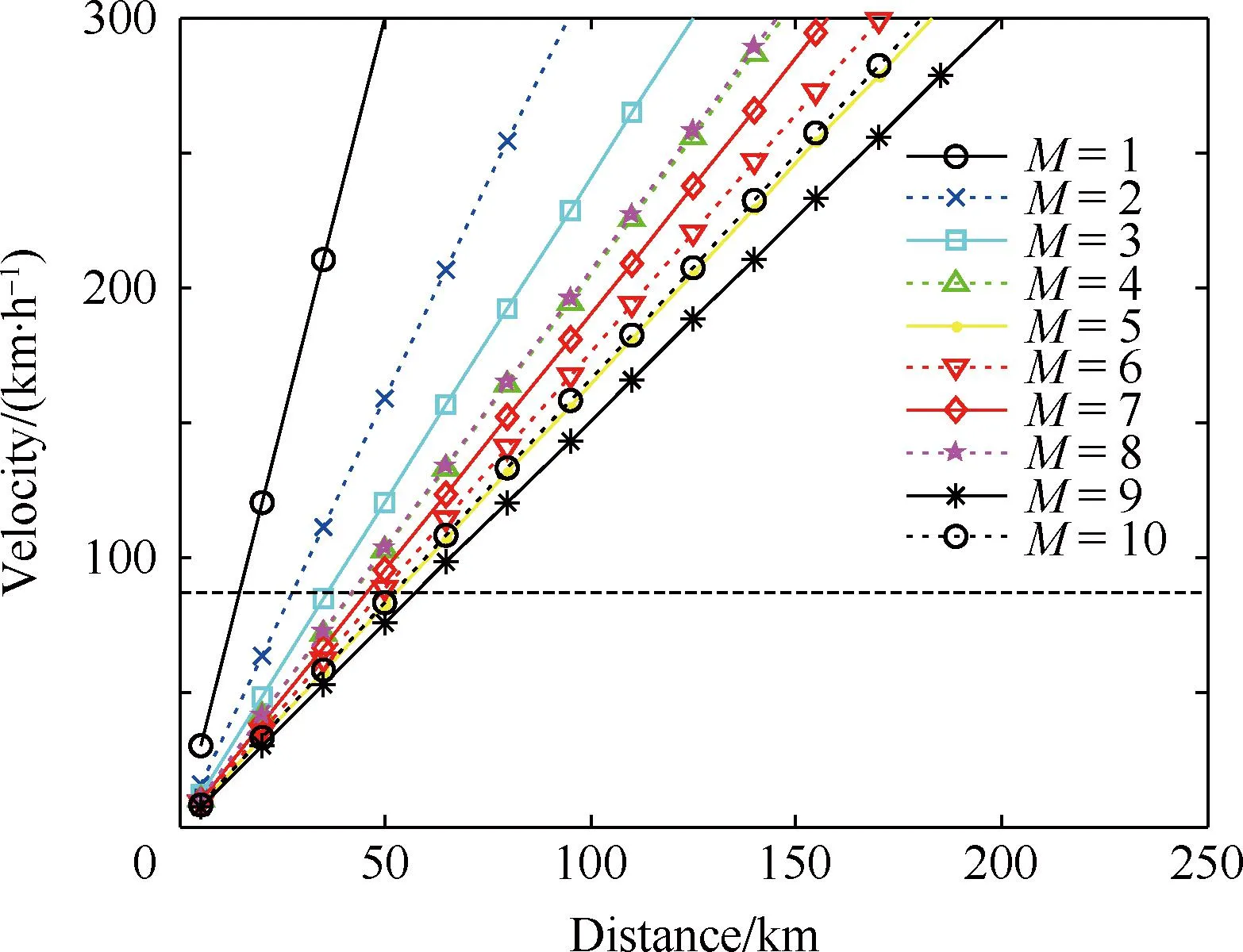
Fig. 15Scheme (M, N) under various design prabobility Pdfor T=4.66 h

Fig. 16Patrolling distance per UAV and per sortie
Fig. 17Variation of maximum patrolling distance and
total sorties with quantity of UAVs
Fig. 18Radar of different types of optimal scheme
