微型飞行器的设计原则和策略
2016-05-05昂海松
昂海松
南京航空航天大学 微型飞行器研究中心, 南京 210016
微型飞行器的设计原则和策略
昂海松*
南京航空航天大学 微型飞行器研究中心, 南京210016
摘要:为了探索微型飞行器(MAV)总体设计方法,在简要介绍微型飞行器的概念与技术难点的基础上,笔者根据多年的MAV研究和试验,提出了对微型飞行器设计原则的思考,阐述了研究性和实用性MAV以及固定翼、扑翼和旋翼等不同类型MAV的设计特点。通过MAV设计的矛盾与协调关系、设计方法和优化问题说明了MAV设计的特殊性。最后,展望了微型飞行器设计的发展方向,为微型飞行器总体设计研究提供了参考思路。
关键词:微型飞行器; 总体设计; 技术难点; 设计原则; 设计策略
微型飞行器(MAV)是20世纪90年代开始提出的新概念技术。自1997 年美国国防高级研究计划局(DARPA)正式启动微型飞行器基础技术研究到现在十多年时间,受到各国许多著名大学和研究机构的热情响应和探索研究。美国与欧洲等举办多次微型飞行器的表演与比赛,出现了多种形式、大小不同、形状新颖的微型飞行器试验机。
目前,微型飞行器技术向基于两个不同目的的方向发展。
一类是研究性MAV的发展。以大学为主要研究力量,仍然苦苦追寻着DARPA于1996年讨论的“15 cm尺寸”的目标[1],研制出各种各样探索性的微型飞行器,如图1所示,有固定翼、扑翼和旋翼3类微型飞行器[2]。从各国微型飞行器的表演与比赛作品可以看出,其形式多样,但多数还是遥控飞行表演,少数具有一定的自主飞行控制与导航能力。美国Florida大学已研制出新型的15 cm微型飞行器并成功飞行,处于15 cm尺寸微型飞行器研制的领先水平。微型共轴双旋翼飞行器和四轴螺旋桨微型飞行器,以其可在空中悬停而引起很多人的兴趣。一大批科技工作者苦苦研究和探索,寻找新的突破口,因此才有美国加州大学伯克利分校研制的25 mm大的“机器苍蝇”(Micromechanical Flying Insect)和哈佛大学研制的30 mm大的“Flying Robotic Insects”,尽管目前它们只是无控制地扑动“飞行”很一小段距离。
另一类是实用性MAV的发展。DARPA和军方同时把注意力投向军事实用性。自2001年起,美国国防部将MAV列入先期概念技术演示(Advanced Concept Technology Demonstration)计划。虽然DARPA曾提出150 mm 的研制计划,但目前难以应用于实际。由于军事上需求较迫切,在众多探索性微型飞行器中,2006年,美国DARPA和军方选择一些实用可行性更大、但尺寸也更大的微型飞行器作为微型空中侦察装备,进入“演示验证”和战场上试用, 如图2所示[2]。

图1研究中的15 cm或更小的微型飞行器[2]
Fig. 115 cm or less micro air vehicle under research[2]

图2美国应用于军方的微型飞行器[2]
Fig. 2MAV applied to US military[2]
美国航空环境(AeroVironment)公司最早研制的“黑寡妇”(BlackWidow)MAV采用固定翼方案。其第一代和第二代产品(150 mm)于2000年通过试飞实验,曾名喧一时。其中第二代“黑寡妇”MAV,质量为80 g,可连续飞行30 min,后因承载能力太弱而停止研制。公司改为研制“黄蜂”系列(WASP)MAV,其中WASP I型翼展为330 mm,WASP II型翼展为410 mm。该公司还研制了由燃料电池驱动的“大黄蜂”(Hornet),该MAV翼展为380 mm。2006年12月,美国空军和海军陆战队选择美国航空环境公司研制的MAV“黄蜂”中较大尺寸的WASP II型(质量为273 g)和WASP III型(质量为430 g),计划作为美国“战场空中目标侦察系统”进行研制。
美国霍尼韦尔公司(Honeywell)为DARPA研制了一种与之前的微型飞行器完全不一样的涵道风扇式MAV,涵道直径为330 mm,高约为600 mm,质量为16 lb(1 lb=0.453 592 4 kg),由于采用多油箱汽油发动机驱动,承重大,可悬停。2006年,DARPA将其正式列入军事用途的先期概念技术验证计划。2007年,该型MAV已部署到伊拉克进行试用,用于从空中识别临时爆炸装置(IED)。
1微型飞行器的技术难点
由于微型飞行器是新概念技术,成熟的设计方法和设计资料很少,在笔者十几年来对数十种微型飞行器的研制和探索中,深刻体会到MAV设计、研制和试验中的一系列技术难点[3-4]。
1) 低雷诺数气动特性引起的不稳定
雷诺数Re是表征流体惯性力和黏性力之间相互关系的无量纲数,Re=ρVL/μ,其中:ρ为大气密度;V为飞行速度;L为飞行器特征长度;μ为黏性系数。
由于MAV尺寸小、速度低,呈典型的低雷诺数气动特性。微型飞行器飞行时因低雷诺数,其表面的层流附面层难以维持,十分容易发生“分离”,而导致小迎角也会出现MAV表面气流的不稳定,如图3所示[5]。
2) MAV的非线性、非定常力学特征

图3烟风洞中低雷诺数层流附面层发生分离的实验[5]
Fig. 3Low Reynolds number laminar boundary layer separation experiment in smoke wind tunnel[5]
微型飞行器外形布局与常规无人机有很大不同。固定翼MAV的小展弦比单翼布局、扑翼MAV的复杂运动翼、旋翼MAV的升力与速度控制的耦合等,使得其气动和飞行力学呈强烈的非线性和非定常特征。因此,MAV的构型与运动形态以及其飞行控制必须作特殊设计(参见图4,图中:t为时间;T为周期;α为迎角;fflap为扑动频率)。
3) MAV质量小、抗阵风能力弱
MAV质量小(典型的小于200 g),在有风或大气紊流的情况下不但难于维持稳定,甚至有在强风作用下坠毁的可能。这无疑给复杂环境和较远距离的自主飞行控制带来极大的困难。图5反映了阵风作用下固定翼微型飞行器升力系数CL和阻力系数CD的波动明显[5],图中:f为阵风脉动频率。
4) MAV承载能力小、续航时间短
由于MAV尺寸小升力有限,因此其承载能力很小。为了保证MAV的结构、系统和任务载荷的功能,系统的重量和尺寸必须要超微型化。而且动力与能源的重量也有限制,要具备一定的续航时间,这无疑是设计的难题。

图4扑翼升力与推力的非定常变化[5]
Fig. 4Variation of unsteady flapping wing lift and thrust[5]

图5阵风对MAV升力和阻力的影响[5]
Fig. 5Effect of gust on MAV’s lift and drag[5]
5) 高度集成的系统电磁干扰问题
MAV不得不对重量要求“苛刻”并对内部系统要求高度集成,在十几厘米范围内,要布置动力系统、能源装置、飞行控制与导航系统、信息传输系统和任务装置,所以对各个“分系统”不能不“以克计较”并减少设计接口。由于微弱的信号和高密度电路所产生的内部电磁干扰问题,是MAV精确控制和信息传输的难关。
2微型飞行器设计的原则
对于微型飞行器设计的特殊性,国际无人机协会主席Michelson在论文“微型飞行器系统设计概述与集成”[1]中有较深刻的理解:“……15 cm以下尺度的微型飞行器并不是大尺寸飞行器的简单缩小,因为物体运动所受到的空气动力作用随着物体尺寸的减小而改变。……更严重的气动设计问题是微型化、能源和非尺度问题。”
微型飞行器的设计对航空工程师提出了新的挑战,不能不寻求不同于常规无人机设计传统程序的新思路。
1) 研究性微型飞行器
直到目前为止,微型飞行器还是探索类的新概念飞行器。微型飞行器能小到什么程度?能完成什么样的功能?什么样的构型比较适合?尚需要长时间的研究,因此,研究性微型飞行器的探索是必要的。这类MAV的研究(不论是理论研究还是飞行器试验机的研制)不一定有明确具体的实用目标。研究的目的主要是探索微型飞行器的尺寸效应、构型与布局、动力与能源、飞行控制方法、承载能力、执行任务功能、系统的超微型化、避障功能等。为此,以微型飞行器小尺寸来推动各种形式的MAV设计,以及与之相适应的微型器件的设计与制造和智能控制方法仍然是MAV研究的发展方向。
2) 实用性微型飞行器
鉴于微型飞行器具有体积小、重量轻、隐蔽性好、灵活性强以及适于近距离细节侦察等特点,其正在成为一类新型作战模式和特殊环境(如城市、山林、海上登陆、机降作战和反恐等)下的特种装备或“蜂群”式作战装置。研制当前需求的实用微型飞行器也非常必要。
由于现阶段在材料、微细加工、系统模块、动力、能源、任务装置等方面的微型化和重量的局限性,要想使微型飞行器执行一定的实用功能(飞行距离、续航时间、承载能力、自主能力和执行任务),必须放宽对原来有关微型飞行器的技术要求,尤其是对尺度的放宽,以保证能承载足够的重量、满足续航时间要求的能源和足够的抗风能力。
3) 微型飞行器类型的选择
在微小尺寸的限制下研制出多种多样的飞行器构型,也是MAV外形设计与常规无人机布局的很大不同。从飞行原理角度将现有的MAV分为固定翼微型飞行器、扑翼微型飞行器和旋翼微型飞行器3类[5-6]。
① 固定翼微型飞行器
固定翼微型飞行器是目前几种MAV中飞行速度最快的一种,而且阻力小、耗能小,但不能悬停。即使是固定翼微型飞行器也与常规无人机有所不同,通常不但设计为单翼式,而且受最大尺寸限制机翼为小展弦比,如图6所示。
② 扑翼微型飞行器
仿鸟或昆虫的扑动飞行模式是微型飞行器目前独特的形式之一[7]。扑翼微型飞行器在空中飞行时酷似鸟,如图7所示,因此隐蔽性好。由于目前的扑翼驱动多半为机电机构,尚不能实现生物肌肉驱动,因此能耗较大。随着扑动机构的改进和智能化,扑翼微型飞行器将是很有发展前途的MAV。
③ 旋翼微型飞行器
旋翼微型飞行器是指主要通过旋翼(包括螺旋桨)获得升力和前进力的微型飞行器,有单旋翼型和共轴双旋翼型,目前发展迅速的是多旋翼型,如图8所示。
旋翼微型飞行器的最大特点是可以在空中悬停,但相对耗能大、速度慢。
由于目前微型飞行器的实用产品较少,所以尚不宜像常规无人机那样以使用性能来分类,而是根据使用要求来选择和设计适合类型的微型飞行器。
4) 微型飞行器的技术要求

图6南京航空航天大学研制的部分固定翼微型飞行器
Fig. 6Parts of fixed wing MAVs developed by Nanjing University of Aeronautics and Astronuatics (NUAA)

图7南京航空航天大学研制的部分扑翼MAV
Fig. 7Parts of flapping wing MAVs developed by NUAA

图8南京航空航天大学研制的部分多旋翼MAV
Fig. 8Parts of multi-rotor MAVs developed by NUAA
与其他无人机一样,微型飞行器的技术要求也涉及到:任务使命、环境适应性和隐蔽性、飞行性能(速度、高度、续航时间、控制半径、起降方式和飞行控制等)、 使用性要求(可用性、可靠性、维修性、安全性和便携性等)和经济性要求。
然而,微型飞行器更强调隐身、适应特殊环境、狭小空间飞行、使用便捷和低成本等特殊要求。对微型飞行器具体技术指标的确定,必须进行精心的综合设计与协调,经过反复修改才能达到所期望的技术要求。
3微型飞行器设计的策略
1) MAV设计的矛盾与协调
微型飞行器体积微小且高度集成,改变任何一个技术指标值,都会牵一线而动全身。因此微型飞行器不能像大型无人机那样,对外形、气动、结构、动力、控制系统、信息系统、任务装置各自进行独立设计,必须采取综合设计、反复协调的策略。
① 尺寸、有效载荷和续航时间的协调
微型飞行器的尺寸限定了最大有效载荷,如果尺寸大小确定,要增加有效载荷必然会消耗更大的能源,而在能源重量不变的情况下,那只能减少续航时间。但在一定微小尺寸范围内,并不是尺寸越大,承载重量越大。这是因为尺寸增大,阻力增大,所耗能源增大,因此单纯增大尺寸,在续航时间不变时,并不一定能增加有效载荷重量。因此,在微型飞行器尺寸一定的情况下,必须对有效载荷和续航时间的指标进行协调。
② 升力、动力和能源的协调
无论是固定翼、旋翼、还是扑翼微型飞行器,升力的大小取决于提供的动力大小。然而,增加动力,必然会增加能源的消耗。但在其他性能指标不变情况下,能源加大则增加了飞行器重量,因而,原有的升力就不够了。目前,微型飞行器多数采用电动机,通常电池重量要占到飞行器总重量的1/3左右,高能重比的电池选取很重要。目前聚合物锂电池重量减轻的空间已有限,如果没有其他能源替代,那么电池重量、电动机耗电率、承重升力必须反复进行协调。
③ 尺寸、质量和控制的协调
常规尺寸的无人机,其尺寸大小与飞行控制之间并没有直接关系。微型飞行器则不然,因为微型飞行器尺寸越小,其低雷诺数的气流特性越明显。低雷诺数的气流容易在飞行器表面产生气流分离,从而引起飞行的不稳定。另一方面,在小尺寸下要保证提供升力的机翼面积,就只能设计为小展弦比(甚至展弦比接近1),而小展弦比机翼的非线性飞行力学特征较突出(见图9[5])。同时,小尺寸和小质量的微型飞行器还易受大气紊流的干扰。低雷诺数、非线性、非定常的空气动力学特性给飞行控制带来很大的困难。微型飞行器的尺寸与质量的指标和控制方法的设计必须反复进行协调。
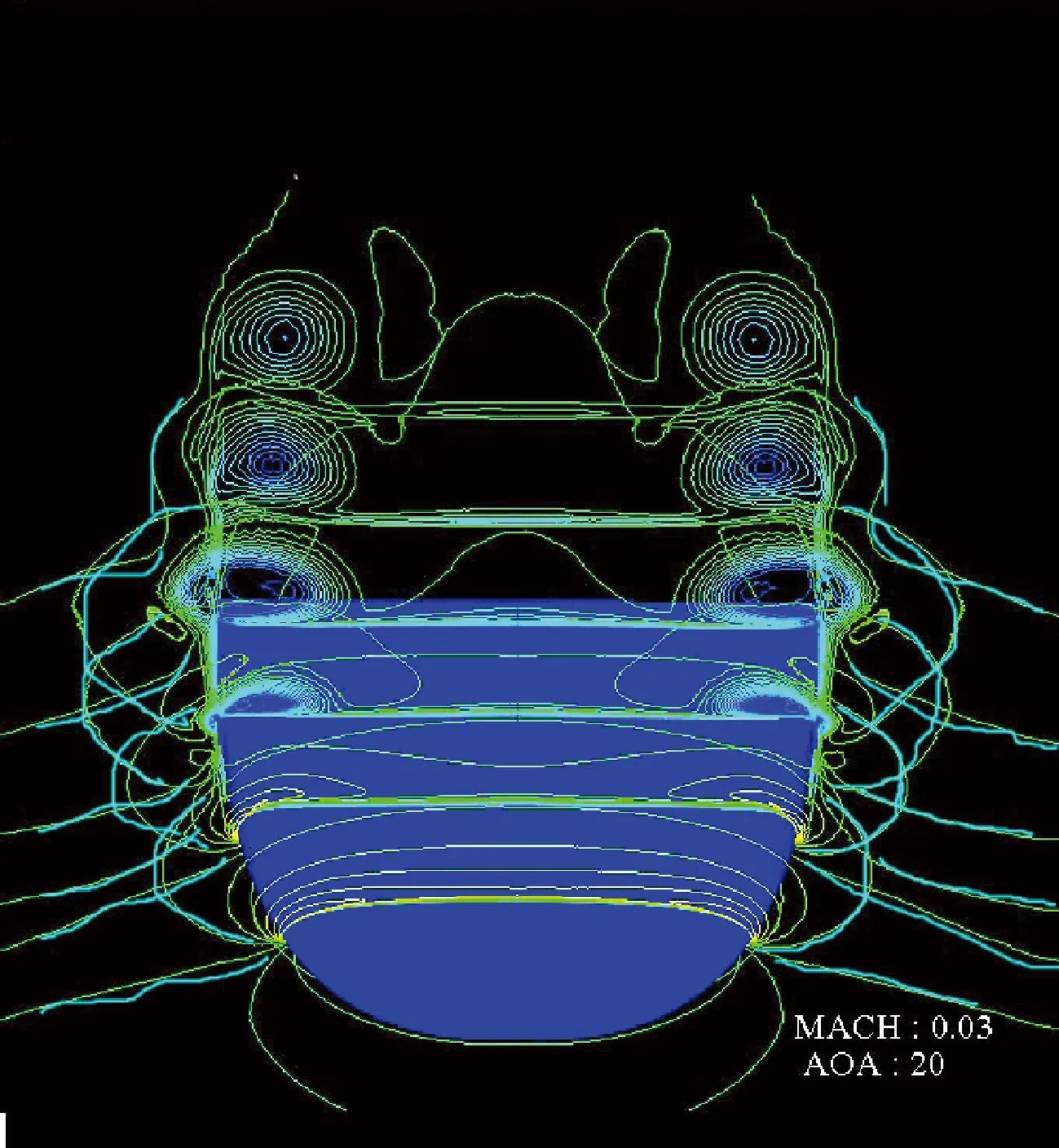
图9固定翼MAV的非线性涡[5]
Fig. 9Nonlinear vortex of fixed wing MAV[5]
④ 高集成性、尺寸和电磁干扰的协调
系统的高集成性是先进微型飞行器设计所必需的。而小尺寸的微型飞行器机体,给各种电器(动力系统、能源装置、伺服舵机)、电子设备(控制与导航系统、信息传输系统、任务设备)留有的空间很小,因此,高密度电路、电器和电子器件对微系统微弱信号所产生的内部电磁干扰问题,一直是微型飞行器电磁兼容设计的难关。因此在强调高集成性的同时,必须精心布置各种电器、电子设备的位置并进行电磁屏蔽设计。
微型飞行器的特点就在于小,而小尺寸给微型飞行器的设计和研制带来一系列的矛盾。这些矛盾又密切相关,不是单一改变总体尺寸就能解决的问题。“为减轻飞机的每一克重量而奋斗”是飞机设计者的座佑铭,对微型飞行器设计来说,更是成功与否的关键。微型飞行器系统每一个零部件必须“克克计较”。与常规飞行器相比,微型飞行器的尺寸要求与功能性要求的协调存在更大的困难性,这主要受制于现有微小型器件的技术水平。如果希望微型飞行器完成某系列技术指标的性能要求,同时又严格限定其最大尺寸,有时会矛盾到“不可能”。由于微型飞行器本身就很小,变化余量小,使用部门必须与有经验的设计部门仔细讨论研究,反复协调技术指标要求方可。
2) MAV设计方法的特殊性
① 特殊的气动设计方法
由于 MAV的非线性、非定常力学特征,线性空气动力学计算方法已不适合用于微型飞行器设计。为此,需要求解非定常Navier-Stokes流体动力学方程,即
(1)
式中:W=[ρρuρvρwρe]T为守恒变量;F(W)和Fv分别为对流通量和黏性通量,守恒变量对原始变量的雅克比矩阵为
(2)
对微型飞行器求解式(2):一要解决适应低雷诺数问题,如用预处理方法;二要求解随时间边界变化的非定常空气动力学问题,如用预处理双时间步推进法[5]。
对于具有大幅边界运动的扑翼气动特性计算,还必须要设计求解非定常流场的良好动态网格生成技术,如文献[5]提出的一种动态嵌套网格分层管理的思想和双重Delaunay图映射的动态网格生成方法,如图10所示,解决了既有部件大幅运动又有结构变形的柔性扑翼的非定常流场计算问题,揭示了仿鸟与仿昆虫扑翼由于附着涡的延迟脱落而产生高升力和柔性扑翼产生“反卡门涡街”的尾流作用而形成推力的机理(见图11),解释了鸟没有螺旋桨或喷气机而能前进飞行的原理[5]。

图10动态嵌套网格[5]
Fig. 10Dynamic nested grid[5]

图11扑翼涡高升力机理与柔性扑翼反卡门涡街[5]
Fig. 11High lift mechanism of flapping wing and anti Carmen vortex of flexible flapping wing[5]
② 材料与结构
要减少微型飞行器结构重量,必须用复合材料。目前,MAV多半采用比模量、比强度高的碳纤维树脂复合材料。为了减少着陆碰撞损伤,也有将着陆部分结构用芳纶纤维复合材料的。
固定翼MAV结构通常设计为翼身融合有空腔的整体结构。为了减缓阵风作用,固定翼MAV也有设计成柔性单壁面结构(如图12所示)的,经实验验证[5],柔性结构翼有明显的减缓阵风干扰的作用。扑翼的结构一定要设计成有弦向柔性变形的形式。因为扑翼在上下主动扑动的同时,只有通过柔性结构的惯性力而产生弦向“扑动”,才能产生前进的推力(见图11)。多旋翼微型飞行器通常设计有沿径向伸出的支臂。为了便于携带,南京航空航天大学微型飞行器研究中心将其设计为支臂可折叠形式,如图13所示[6]。

图12柔性固定翼结构[5]
Fig. 12 Flexible fixed wing structure[5]
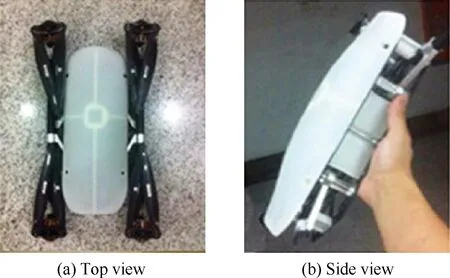
图13四旋翼折叠形式[6]
Fig. 13 Folding form of four-rotor wing[6]
智能材料结构也是微型飞行器新型结构发展的一个方向,如哈佛大学研制的“飞行昆虫”试验机(见图1),就是设计一种电致变形材料驱动机构来产生120次/s的翼拍动。
鸟与昆虫用很小的能量可以飞行很长时间,要远远小于现在用电机带动机械机构进行扑翼运动所消耗的能量。生物专家研究发现,由肌肉的伸缩来带动骨骼运动是一种极省能量的驱动方式,而肌肉的伸缩是由肌肉中存在的两种纤维状的蛋白质“肌动蛋白”和“肌球蛋白”相互滑动产生的,从而才有了对外做功的机械能。两种纤维状蛋白质的运动是由动物所摄取的食物转化的化学物质在神经指令下的化学作用结果。有专家研究用电致伸缩聚合体人造肌肉(ElectrostrictivePolymerActuatedMuscle,EPAM)来驱动扑翼“骨骼”,无需电动机、减速齿轮等复杂机械装置而实现扑翼机械运动[8]。
③ 微机电系统(MEMS)传感器
微型飞行器系统要尽可能设计的重量轻和体积小,因此,所用传感器必须超微型化,目前主要采用的是MEMS传感器。
MEMS是微电路和微机械按功能要求在芯片上的集成,芯片尺寸通常在毫米或微米级。MEMS传感器是采用微机械加工技术制造的新型传感器。
微型飞行器所用传感器主要分两类:一类是飞行控制导航所用传感器,如陀螺和加速度计(如图14所示[5])、磁强计、气压计、温度传感器、卫星导航接收机等,以及微处理计算机芯片(如图15所示[5]);另一类是对外探测传感器,如微型可见光摄像机、热成像仪、红外探测仪、超声波测距仪、激光测距仪等。无论何种传感器,想做到微型化都离不开MEMS技术,有的还需要将原来的电路板模块研制成集成芯片。

图14MEMS陀螺和加速度计[5]
Fig. 14MEMS gyroscope and accelerometer[5]

图15微型飞行控制模块(南京航空航天大学)[5]
Fig. 15Micro flight control module (NUAA)[5]
由于原理、结构设计和加工工艺方面的限制,微型传感器的精度通常较低,测量信息中有时误差比较大,对误差进行分析和建模是提高器件特性的有效手段。进一步对微型传感器进行误差补偿(如图16所示)以提高MEMS器件的使用精度[6]。

图16MEMS陀螺滤波前后Allan方差图对比[6]
FIG. 16Comparison of Allan variance diagram before and after wave filtering of MEMS gyroscope[6]
④ 智能控制方法
由于MAV质量小,易受阵风干扰而呈强烈的非线性和大幅度的非定常飞行动力学问题,无人机常规的比例-积分-微分(PID)控制方法已不适用,必须根据不同的微型飞行器类型、甚至不同的特定MAV对象,来建立智能飞行控制方法。
文献[9]中提出了一种在线神经网络动态逆自适应控制方法(如图17所示),结合时标分离的思想,设计了慢变量和快变量动态逆,同时引入在线神经网络自适应补偿逆误差,神经网络通过权重的在线调整,可以重构多种原因所引起的逆误差,动态消除逆误差对整个系统的影响,并通过伪控制补偿器适当改变参考模型输出信号,避免了自适应神经网络与作动器之间的交互影响,从而使系统始终保持稳定。试验结果表明:神经网络动态逆有较强的鲁棒性、稳定性、抗阵风干扰能力和指令跟踪能力,显著提高了微型飞行器控制自适应能力。
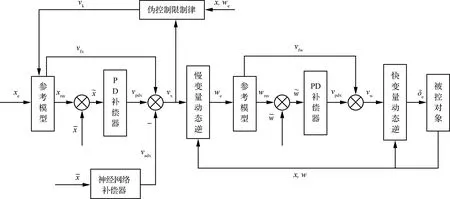
图17在线神经网络的自适应控制系统结构[9]
Fig. 17Structure of adaptive control system of online neural network[9]
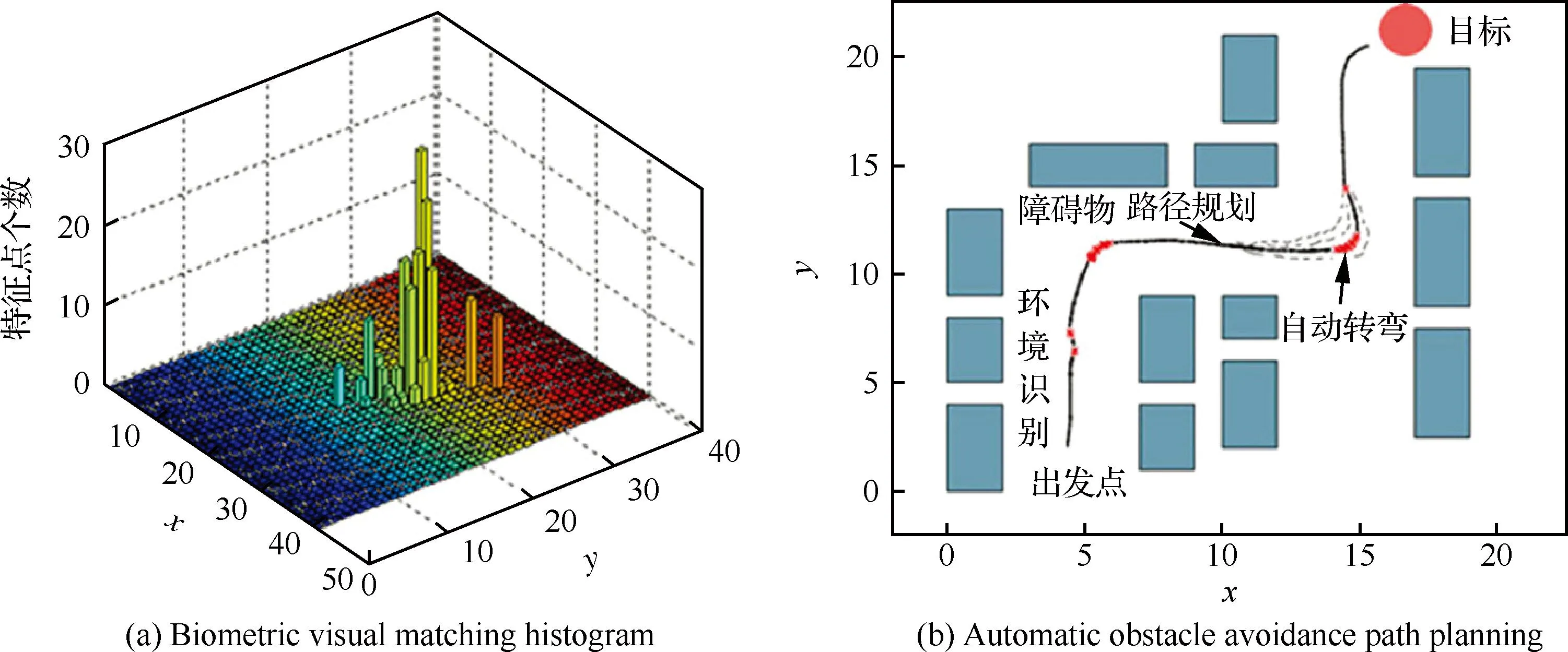
图18基于生物视觉匹配的全自主识别环境方法[6]
Fig. 18Methods of fully autonomous recognition of environment based on biological visual matching[6]
要实现微型飞行器室内自主控制飞行,单纯的基于惯性导航的智能软件控制方法还不够,GPS卫星导航因室内无信号而无法使用,因此要识别室内环境、避开障碍物飞行,还需要增加其他传感器及控制方法。南京航空航天大学微型飞行器研究中心创建了一种无卫星导航、自主识别环境和自动避障的全自主微型机载控制系统。提出一种无GPS导航、无需遥控或地面站通信,集视觉、超声波、激光、惯性、磁传感器的机载全自主飞行控制与导航技术,建立了环境特征识别、障碍位置估计、走廊深度透视分析、运动轨迹优化的环境自主识别方法,提出了基于生物视觉匹配方法对目标的跟踪与定位技术(如图18所示[6]),建立了一套微型飞行器自动识窗入室、自动避障、自动规划的机载全自主飞行控制导航系统。近来利利用昆虫对光流敏感的避障原理,设计的基于光流传感器的MAV飞行控制方法[10],也是一种有意义的探索。
此外,扑翼MAV的升力控制与推力控制耦合问题、多旋翼MAV的姿态控制与轨迹控制耦合问题,都需要建立特殊的控制模型和控制方法。
3) 微型飞行器系统设计的优化
从上述分析可知,要设计出较满意的微型飞行器,对设计进行细致的优化,无疑是十分必要的。然而,微型飞行器尺寸小、重量轻、系统高度集成,使得单方向优化设计行不通。协调综合优化设计是微型飞行器必需的途径,仅就尺寸和续航时间问题就涉及到飞行器总体设计、空气动力学、动力、能源、电子、自动化、机电制造等学科,这也是微型飞行器需要多学科设计综合优化的原因。
多学科设计优化(MDO)方法是近年来发展起来的一种可以解决复杂工程系统和多学科动态影响的优化设计方法,通过充分利用各个学科之间的相互作用所产生的协同作用,以获得系统的整体最优解。
只有采用多学科优化设计方法才能有效得到“最佳”设计结果。如,以最小重量为目标的MDO,包括几何外形、结构、内部系统重量与布置的设计。当然,MDO依赖于各个子系统的分析方法是否有效。笔者先后对MAV机翼气动外形设计、增大航程优化设计、扑翼的气动设计、承重能力设计、抗阵风干扰设计进行了MDO研究,取得了一定的效果。从科学意义上来说,微型飞行器技术正是在小尺寸下“逼”出来的新技术。必须设计新的布局以及柔性结构来适应低雷诺数气动特性和大气紊流的干扰;必须研究小到0.2g(甚至更小)的MEMS传感器和其他电子器件,以及如何设计成高度集成、重量很轻的内部系统;必须研制能产生足够功率而重量微小的动力装置;必须研究新型的比能高、供能时间长的轻型能源;必须研究与现在不同的材料结构和舵面驱动方法;必须研究完全不同于无人机各种动翼型的飞行器原理,以实现小尺寸而满足性能要求的新型MAV。
4结束语
微型飞行器技术从正式计划进行基础研究到现在仅十几年时间,其仍然属于起步阶段的新概念技术。根据国外和笔者研究的情况,要研制尺寸更小、性能好、实用性强的微型飞行器,在新型MAV型式探索、力学与控制原理、微型器件、动力、微电子技术等方面需要大量的研究[11-14]。
各种微型飞行器类型与系统技术的发展还刚刚开始,人们心目中的微型飞行器,希望更微小、更灵巧和更智能化,能够像自然界各种各样的鸟类一样自由飞翔,像蜜蜂、蚊子一样隐秘潜行,具有像蜜蜂一样的视嗅觉与灵感、像飞行生物一样吃几粒谷就能飞几十公里的能力。
因此,微型飞行器系统技术的发展,不仅要创新更多构形的MAV,还要发展更微小的动力装置、能重比更大的微型新能源和转化技术、更轻和具有主动力感知与控制的智能材料、生物量级的传感器、仿生物神经智能控制技术、仿生物对环境的感知识别技术、更微型化的信息传输技术、超微型特种功能装置等。反过来,微型飞行器的研究不仅推动无人飞行器的发展,也必然促进微系统技术的发展,促进生物和多学科交叉技术的发展。
参考文献
[1]DAVIS W R. Micro UAV[C]//23rd Annual AUVSI Symposium. Brussels: Unmanned Vehicle Systems, 1996:15-16.
[2]MICHELSON R. Overview of micro air vehicle system design and integration issues[M]//Encyclopedia of Aerospace Engineering: Part 34 Micro Air Vehicles, Chapter 345. Reston: AIAA Inc., 2011: 4253-4264.
[3]昂海松. 微型飞行器与无人机不同的概念与特点[J]. 无人机, 2006(6): 20-24
ANG H S. MAV and the UAV concept and characteristics of different[J]. UAV, 2006(6): 20-24 (in Chinese).
[4]昂海松. 微型飞行器的技术难点及其突破途径[C]//2008尖兵之翼——中国无人机大会论文集. 北京: 航空工业出版社, 2008: 546-549.
ANG H S. MAV technical difficulties and solutions[C]//Procceding in Chinese UAV Conference. Beijing: Aviation Industry Press, 2008: 546-549 (in Chinese).
[5]昂海松, 肖天航, 郑祥明, 等. 微型飞行器设计导论[M]. 西安: 西北工业大学出版社, 2012: 1-285.
ANG H S, XIAO T H, ZHENG X M, et al. Introduction to the design of micro air vehicle[M]. Xi’an: Northwestern Polytechnical University Press, 2012: 1-285 (in Chinese).
[6]昂海松, 周建江, 曹云峰, 等. 微型飞行器系统技术[M]. 北京: 科学出版社, 2014: 1-326.
ANG H S, ZHOU J J, CAO Y F, et al. The MAV system technology[M]. Beijing: Science Press, 2014: 1-326 (in Chinese).
[7]ANG H S, XIAO T H, DUAN W B. Flight mechanism and design of biomimetic micro air vehicles[J]. Science in China Series E: Technological Science, 2009, 52(12): 3722-3728.
[8]COLORADO J, BARRIENTOS A, ROSSI C, et al. Biomechanics of smart wings in a bat robot: Morphing-wings using SMA actuators[J]. Bioinspiration & Biomimetics, 2012, 7(3): 1-16 .
[9]蔡红明, 昂海松. 基于自适应逆的微型飞行器飞行控制系统[J]. 南京航空航天大学学报, 2011, 43(2): 137-142.
CAI H M, ANG H S. MAV flight control system based on adaptive inverse[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2011, 43(2): 137-142 (in Chinese).
[10]FRANCESCHINI N. Biomimetic optic flow sensors and autopilots for MAV guidance[M]//Encyclopedia of Aerospace Engineering l: PART 34 Micro Air Vehicles, Chapter 353. Reston: AIAA Inc., 2011: 4347-4362.
[11]BENEDICT M, WINSLOW J, HASNAIN Z, et al. Experimental investigation of micro air vehicle scale helicopter rotor in hover[J]. International Journal of Micro Air Vehicles, 2015, 7(3): 231-256.
[12]MISHRA S, TRIPATHI B, GARG S, et al. Design and development of a bio-inspired flapping wing type micro air vehicle[J]. Procedia Materials Science, 2015, 10: 519-526.
[13]VERBOOM J L, TIJMONS S, DE WAGTER C, et al. Attitude and altitude estimation and control on board a flapping wing micro air vehicle[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ: IEEE Press, 2015: 5846-5851.
[14]PAULOS J, YIM M. Flight performance of a swashplateless micro air vehicle[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ: IEEE Press, 2015: 5284-5289.
昂海松男, 教授, 微型飞行器研究中心主任。主要研究方向: 飞行器设计。
Tel: 025-84896205
E-mail: ahs@nuaa.edu.cn
Received: 2015-08-11; Revised: 2015-10-21; Accepted: 2015-11-22; Published online: 2015-11-27 09:22
URL: www.cnki.net/kcms/detail/11.1929.V.20151127.0922.002.html
Foundation item: Open Project of State Key Laboratory of Mechanics and Control of Mechanical Structures (1001-IZD15001-1505 MCMS-0415G01)
Design principles and strategies of micro air vehicle
ANG Haisong*
Research Center of Micro Air Vehicle, Nanjing University of Aeronautics and Astronautics, Nanjing210016, China
Abstract:In order to explore the overall design method of micro air vehicle (MAV), this paper briefly introduces the concept and technical difficulties of the MAV based on the author’s years of MAV research and test, it also proposes some thoughts on MAV design principle, discusses the research MAV and the practical MAV. The design features of different types of MAVs such as fixed wing, flapping wing and rotor MAVs are described. The strategies of MAV design are given and the special characteristics of MAV design are illustrated in terms of the contradiction and coordination of MAV design method and optimization problem. Finally, the development trend of MAV design is prospected, which provides the reference for the overall design of MAV.
Key words:micro air vehicle; overall design; technical difficulties; design principles; design strategies
*Corresponding author. Tel.: 025-84896205E-mail: ahs@nuaa.edu.cn
作者简介:
中图分类号:V211.3
文献标识码:A
文章编号:1000-6893(2016)01-0069-12
DOI:10.7527/S1000-6893.2015.0314
*通讯作者.Tel.: 025-84896205E-mail: ahs@nuaa.edu.cn
基金项目:机械结构力学及控制国家重点实验室开放课题 (1001-IZD15001-1505 MCMS-0415G01)
收稿日期:2015-08-11; 退修日期: 2015-10-21; 录用日期: 2015-11-22; 网络出版时间: 2015-11-2709:22
网络出版地址: www.cnki.net/kcms/detail/11.1929.V.20151127.0922.002.html
引用格式: 昂海松. 微型飞行器的设计原则和策略[J]. 航空学报, 2016, 37(1): 69-80. ANG H S. Design principles and strategies of micro air vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 69-80.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
