基于模糊PID控制的煤层气智能排采系统应用
2016-04-27高肇凌郭雪张少雷刘凯辉苏尚文许宏奇
高肇凌,郭雪,张少雷,刘凯辉,苏尚文,许宏奇
(河北华北石油荣盛机械制造有限公司,河北 任丘 062552)
基于模糊PID控制的煤层气智能排采系统应用
高肇凌,郭雪,张少雷,刘凯辉,苏尚文,许宏奇
(河北华北石油荣盛机械制造有限公司,河北 任丘 062552)
摘要:煤层气排采通常依靠人工进行排采制度调整,针对这种简单、低效、落后的工作方式,设计了能够满足煤层气排采实际工况需求的智能化排采系统,该系统能够根据煤层气井的井况和采油工程人员制订的排采制度自动、智能化地进行煤层气排采。为了保证系统的稳定性和抗干扰能力,采用了基于模糊控制的PID控制算法,通过在某煤层气排采现场的实际应用验证,整个系统有效、稳定、安全可靠。
关键词:模糊控制煤层气排采
Application of CBM Automatic Pumping System Based on Fuzzy PID Control
Gao Zhaoling, Guo Xue, Zhang Shaolei, Liu Kaihui, Su Shangwen, Xu Hongqi
(Rongsheng Machinery Manufacture Ltd., Huabei Oilfield, Renqiu, 062552, China)
Abstracts: Drainage process adjustment of CBM has been depending on manual operation. Contrapose to such a simple, inefficient and backward working mode, one intelligent pumping system to adapt to actual working condition of CBM drainage is designed. This system can drain automatically and intelligently based on CBM well condition and drainage schedule formulated by oil production engineering staff. Fuzzy control based PID control algorithm is applied to guarantee systems’ stabilization and anti-jamming ability. According to practical test result from one CBM drainage site, it is concluded the whole system is effective, steady, safe and reliable.
Key words:fuzzy control; coal bed methane; draining
煤层气又称煤层甲烷气,煤炭工业称之为煤层瓦斯,是在成煤过程中形成并储存于煤层中的一种非常规的天然气[1]。这种天然气大部分以吸附状态储存在煤岩基质中,少量溶解在煤层水中。煤的吸附性导致煤层气成藏机制和开发技术与常规天然气截然不同。
1煤层气排采工艺介绍
目前,在全球的煤层气工业界,已大量采用的成熟开发方式是压力衰竭法,即利用不同方法使煤层气由吸附态经过解吸变为游离态,游离态煤层气通过各种裂缝流入煤层气井,直至煤层中气体压力很低[2]。
通过多年的发展,排采工艺、排采设备出现了多种形式,但是有杆设备仍是众多排采设备中的主力。然而各煤层气井所选用的排采设备型号都普遍大于实际所需型号,存在严重的投资大、设备不配套、抽空、检泵周期短等诸多问题,严重影响了煤层气井的正常排采,直接降低了煤层气的投资效益,成为了煤层气商业化、规模化开发的瓶颈[3-8]。
针对该情况,笔者在深入研究煤层气排采工艺的基础上研发了1套智能化自动排采控制系统,针对每口煤层气井制订不同的排采制度,控制临界解析压力、液面高度,形成1套符合煤层气排采工艺的精确控制系统,使煤层气井按照排采规律长期高效的开采。
2煤层气智能排采控制系统
2.1基本组成与原理
煤层气智能排采系统是一套建立在煤层气井场的闭环排采系统,系统由抽油机、电动机、控制柜以及井下压力传感器组成。为了使控制系统便于管理和适应排采工况,需要对排采系统进行适当的人为干预,因而同时设计了1套远程监控系统。
智能排采系统根据远程控制系统中上位机站控系统下发的下降目标值、降液速率以及当前的井底流压值,做出智能判断,自动调整变频器运行频率,从而改变抽油机运行冲次,使得井底流压按照排采工艺制度变化,以实现整个排采过程自动控制,控制流程如图1所示。
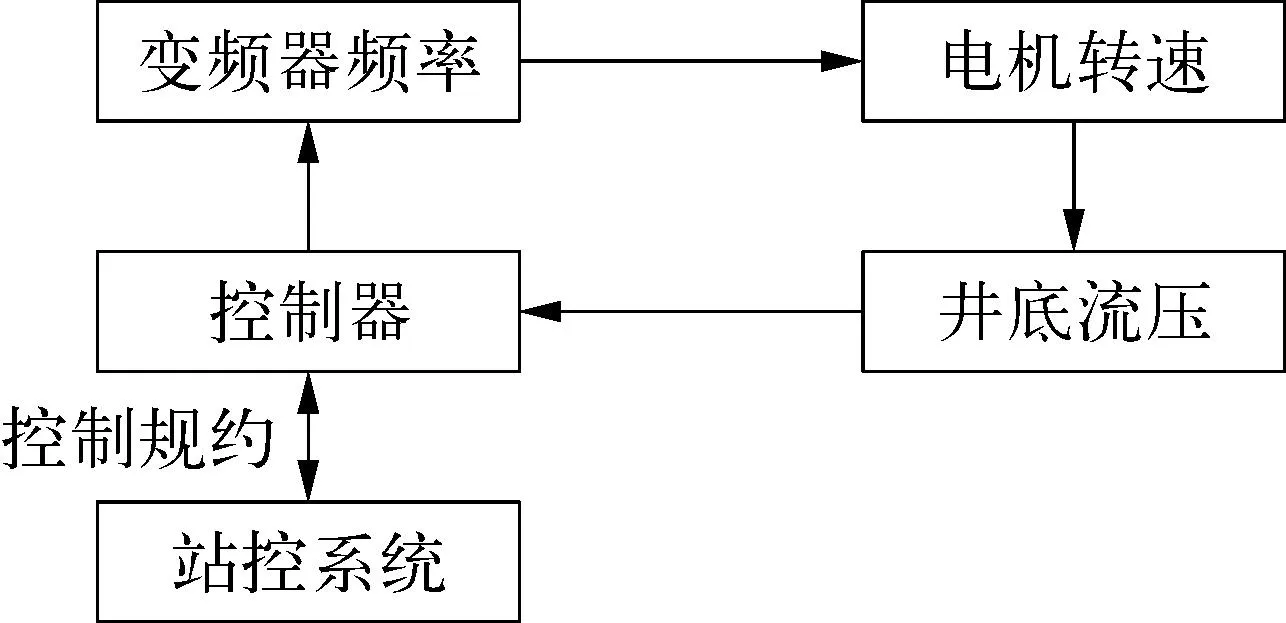
图1 控制流程示意
2.2模糊PID算法
除了系统硬件设计之外,控制算法是保证整个系统能够有效运行的关键,目前针对这种闭环
控制系统,工业控制中应用比较广泛的是PID算法。
传统PID控制原理简单、使用方便、适应性强,可以广泛应用于各种工业过程控制领域[9]。但是本文PID控制对象井底压力具有非线性、大时滞等特点,并且不同煤层气井参数差别变化非常大,系统环节干扰因素多,控制效果不理想。同时,控制器不具备自适应工况能力,不能满足在系统参数发生变化时PID参数随之发生相应改变的要求,严重地影响控制效果。
针对以上问题笔者采用了模糊控制PID方法,以保证系统的自适应性,符合煤层气排采实际工况的需要。PID控制系统结构示意如图2所示。

图2 PID控制系统结构示意
压力PID控制公式:
(1)
式中:KP——比例系数;PI——积分时间常数;PD——微分时间常数;p(t)——调节器输出;e(t)——偏差值。
模糊PID是在PID控制的基础上,总结设计人员知识和经验,找出PID参数与误差及误差变化率之间的模糊关系,建立合适的模糊规则,进行模糊推理,并查询建立的模糊矩阵进行在线PID参数的自整定,来满足不同的控制需求。模糊PID控制结构如图3所示。
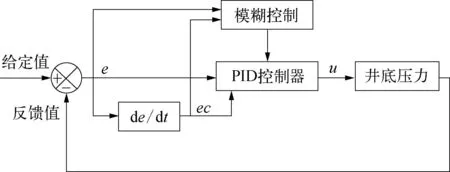
图3 模糊PID控制结构示意注: e——给定值与反馈值的差值;ec——偏差变化率;u——输出值
2.3模糊PID控制器设计
控制系统采用“双入三出”的模糊控制器。输入量为e,ec,KP,PI,PD。由图3可知,控制过程为控制器定时采样压力值和压力值变化后与给定值进行比较,得到e以及ec,并以此作为PLC控制器的输入变量,经模糊控制器输出KP,PI,PD给PID控制器进行调节[10]。
模糊控制器设计包括三部分内容,如图4所示。
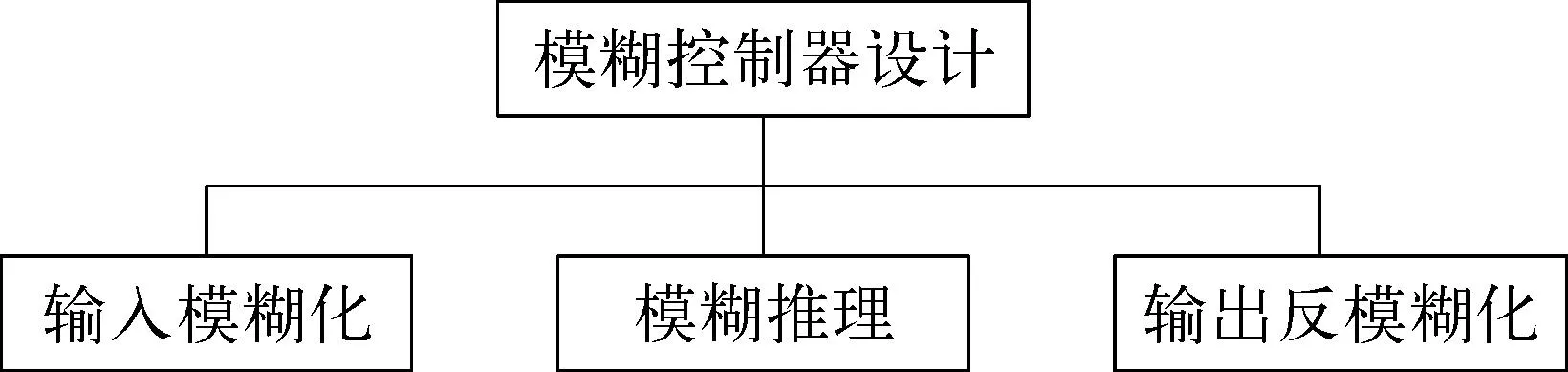
图4 模糊控制器设计
2.3.1输入模糊化
控制对象为井底压力。设定:“当前井底压力值”的论域区间为[500,2 000];“井底压力目标值”的论域区间为[500,2 000];e=当前值-目标值;则e的论域区间为[-1 500,1 500];ec根据变频器的频率和该煤层气现场工况可得其论域为[-5,5];量化级数公式选定为
(2)
式中:Y——量化级数;D——量化等级;a——论域区间左端点;b——论域区间右端点;n——绝对量化间隔,n=3。
根据量化公式可得:e和ec的论域等级为[-3,-2,-1,-0,+0,1,2,3];e和ec的模糊化子集为[NL,NM,NS,NO,PO,PS,PM,PL];PID的KP的论域为[0,10],PI论域为[0,10],PD的论域为[0,5]。因此,根据煤层气现场控制经验,采用专家经验法得出e,ec,KP,PI,PD的隶属度赋值见表1所列。

表1 隶属度赋值
2.3.2模糊推理
在PID控制中,KP控制变化速度,PI控制超调量,PD控制静态误差。根据多年的煤层气排采工况经验,制订了KP,PI,PD的模糊控制规则:KP为增益系数,过大的增益会造成曲线的震荡;PI为积分时间常数,积分时间越短,偏差得到修正就会越快,但是过短的时间常数会造成系统的不稳定;PD为微分时间常数,微分时间越长,输出的变化越快,微分使控制系统对干扰的敏感度增加,即误差的变化率越大,微分控制作用越强。以KP为例可以得到模糊规则,见表2所列。

表2 KP模糊规则表
由模糊规则可写成条件语句:Ife=Aiandec=Bi,thenKPorPIor PD=Ci;其中Ai,Bi、Ci是定义在e,ec和KD,PI,PD论域上的模糊集,每条规则Rij=(Ai×Bi)T×Cij,共有64条规则;根据e,ec模糊量化后的X,Y,可以计算出KP,PI,PD所对应的模糊控制表。以KP为例计算后的模糊控制见表3所列。

表3 KP模糊控制表
按照模糊控制规则和级化函数进行反模糊化计算后可得到实际的参数值。
2.3.3输出反模糊化
反模糊化的实现取决于输入量等级量化程序和模糊控制量查表程序的编制。
3模糊PID的程序实现
选择S7-200 PLC作为排采控制系统的控制器。把查询表元素存储在PLC相应的变址寄存器中。调用模糊控制算法,进行PID运算,得到模糊输出量控制输出值。PLC控制系统流程如图5所示。

图5 PLC控制系统流程示意
4实验结果
在该煤层气选择2口井验证基于PID模糊控制的煤层气自动排采系统,并且选择不同的液面下降速度验证整个排采控制系统的稳定性和实用性,在上位机站控系统软件设定降液目标值和降液速率,同时记录数据验证。
1) 井位HG46-3,降液时间24 h,设定目标值为2.685 MPa,速率为0.02 MPa/d(2 m/d),如图6所示。

图6 降液速度为2m/d时井底流压变化值
2) 井位HG46-1,降液时间24h,设定目标值为2.623 MPa,速率为0(即保持当前液面),如图7所示。

图7 降液速度为0时井底流压变化值
从图6,图7看出: 设定降幅在预定时间内完成,且稳定于设定压力。下降速率稳定,基本成线性。系统控制精度小于0.001 MPa,完全符合油田用户排采工艺要求。
5结束语
为了适应现场实际工况和外部扰动,笔者设计的智能排采系统采用了基于模糊PID的智能控制算法,并且在控制系统核心控制器上将算法
进行编程实现。在上位机站控系统上记录数据验证,选取了2口试验井,根据现场试验结果可以得出以下结论:
1) 基于模糊PID的智能控制算法能够减少外部扰动,提高系统运行的稳定性、可靠性。
2) 整个系统的控制精度小于0.001 MPa,完全满足油田用户的使用要求。
3) 煤层气智能排采控制系统的成功研发,为煤层气实现智能化和数字化油气田管理、提高劳动生产率、节能降耗提供了有力的保障,并且为未来油气田排采装备的发展提供了新的发展方向。
参考文献:
[1]赵庆波.煤层气地质与勘探技术[M].北京: 石油工业出版社,1999.
[2]石惠宁,马成宇,梅永贵,等.樊庄高煤阶煤层气井智能排采技术研究及应用[J].石油钻采工艺,2010,32(04) : 107-108.
[3]来军,程发兴,范樱花.抽油机变频控制器的应用与技术发展[J].石油机械,2003,31(10): 65-67.
[4]张建国,苗耀,李梦溪.沁水盆煤层气水平井产能因素分析[J].中国石油勘探,2010,15(02): 49-54.
[5]杨焦生,王一兵,王宪花.煤层气井井底流压分析及计算[J].天然气工业,2010,30(02): 66-69.
[6]童敏,齐明明,马培新,等.高气液比气井井底流压计算方法研究[J].石油钻采工业,2006,28(04): 71-73.
[7]娄剑青.影响煤层气井产量的因素分析[J].天然气工业,2004,24(04): 62-64.
[8]倪小明,王延斌,接铭训,等.煤层气排采初期合理排采强度的确定方法[J].西南石油大学学报,2007,29(06): 101-104.
[9]曾光奇.模糊控制理论与工程应用[M].武汉: 华中科技大学出版社,2006.
[10]汪小澄,方强.基于PLC的模糊控制研究[J].武汉大学学报,2002,35(03): 79-80 .
中图分类号:TP273
文献标志码:B
文章编号:1007-7324(2016)01-0046-04
作者简介:高肇凌(1981—),2008年毕业于燕山大学模式识别与智能系统专业,获硕士学位,现主要从事石油装备自动化、控制产品的研制工作,任工程师。
稿件收到日期: 2015-09-24,修改稿收到日期: 2015-11-28。
