磁悬浮惯性稳定平台方位轴控制与实现
2016-04-26叶涛丁楠于啸男丁祝顺
叶涛 丁楠 于啸男 丁祝顺
【摘 要】磁悬浮惯性稳定平台利用磁悬浮轴承使方位内框悬浮在惯性稳定平台,消除了机械接触。针对磁悬浮无机械接触的特点,改进原传统机械轴承的驱动设计。介绍磁悬浮稳定平台的系统组成,就磁悬浮方位轴端摩擦随机力矩小等特点,设计了方位轴端的三闭环控制回路。使用无刷直流力矩电机作为系统的传动装置,避免有刷电机电刷和换向器带来的干扰。采用无接触式的光栅尺作为方位轴的测角装置,模拟无刷电机的换向器。通过稳定精度测试,验证方案具有较高的稳定精度。
【关键词】磁悬浮稳定平台;驱动设计;控制回路;光栅尺
Realization And Control for Azimuth Axis of magnetic levitation inertial stabilization platform
YE Tao1,2 DING Nan2 YU Xiao-nan2 DIGN Zhu-shun2
(1.School of Information and Communication Engineering, North University of China, Taiyuan Shanxi 030051, China;
2.Beijing Aerospace Control Institute, Beijing 100039, China)
【Abstract】Maglev intertial stabilization platform utilizes magnetic bearings to make orientation within the frame suspended in inertial stabilization platform, eliminating mechanical contact. For maglev no mechanical contact characteristics, improved drive design traditional mechanical bearings. Introduced maglev system intertial stabilization platform composed of inertial stabilization platform on manegnetic levitation bearing shaft friction torque characteristics of small random designed bearing shaft of three closed-loop control circuit. Brushless DC torque motor as a transmission system to avoid interference brush motor brush and commutator brought. Using the non-contact grating ruler as bearing shaft Angle measuring device,simulation of the brushless motor commutator. By steady accuracy test, verification scheme has higher stable precision.
【Key words】Magnetic levitation stabilized platform; Draven design; Control circuit; Grating ruler
0 引言
稳定平台系统是航空遥感系统重要组成部分[1],其主要的作用:隔离载体运动对遥感相机的干扰;实时提供遥感相机的时间、位置和姿态等信息;为遥感相机保持对地垂直及方位保持。而磁悬浮稳定平台则是利用磁悬浮轴承使得方位内框悬浮在稳定平台内,消除机械接触,以避免摩擦力矩所产生的随机干扰,提高了定轴精度[2],在高精度的航空遥感平台中由广阔的应用前景。本文先介绍了磁悬浮稳定平台的工作原理及组成结构,在结合磁悬浮稳定平台中方位轴悬浮的特点,设计了磁悬浮稳定平台方位轴三闭环控制回路和硬件控制系统,在三框架三轴稳定平台上能够实现了较高的稳定精度。
1 磁悬浮稳定平台工作原理
磁悬浮稳定平台系统主要由惯性稳定平台、磁悬浮轴承、有效载荷、POS(高精度定位定向系统)、外部解算系统组成。POS平台系统和有效载荷安装在方位轴上,方位轴和惯性稳定平台的连接是通过磁悬浮轴承无机械接触式连接,惯性稳定平台通过减震器安装在飞行器上。
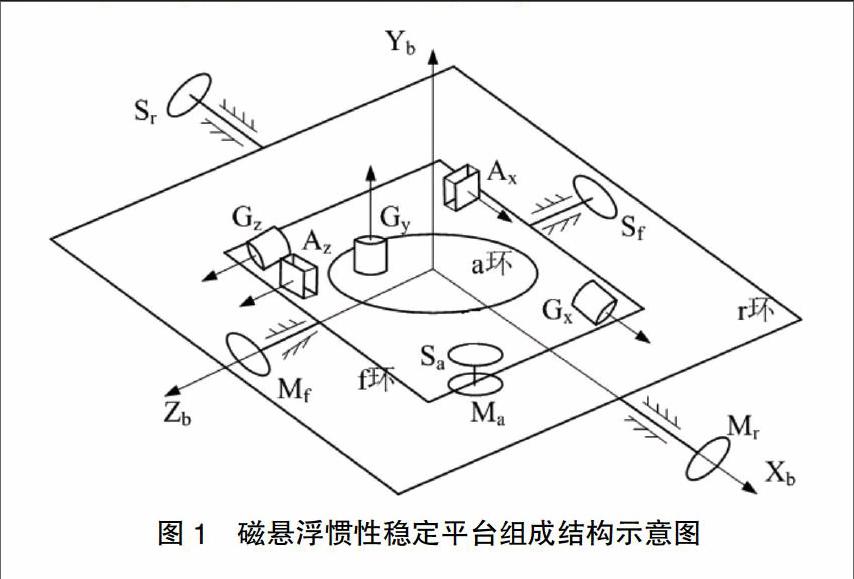
磁悬浮稳定平台三轴框架结构:方位框架、俯仰框架、横滚框架。其示意图如图1所示。有效遥感载荷和POS系统安装在平台的方位框内,通过磁悬浮轴承与稳定平台的俯仰环连接。俯仰环和横滚环的连接方式则是通过机械轴承连接。稳定平台俯仰环和横滚环作用是抑制飞行载体俯仰和横滚运动对遥感相机产生的干扰,保持遥感相机光轴与当地地垂线重合。方位内框的作用是抑制飞行载体偏航角运动对遥感相机的干扰,保持遥感相机对准某一航向。
图1 磁悬浮惯性稳定平台组成结构示意图
俯仰环和横滚环是传统的机械轴承连接,因此在电机驱动设计通过旋转变压器测量平台的旋转角度,FPGA利用角度信息模拟霍尔信号,产生换向表。在DSP计算控制环路产生PWM实现电机的驱动控制。然而由于方位框架作为磁悬浮轴承的转子,和轴端无机械接触,因此在其控制回路的设计和方位轴旋转角度的测量等都需要更加深入的研究。
2 方位轴控制原理
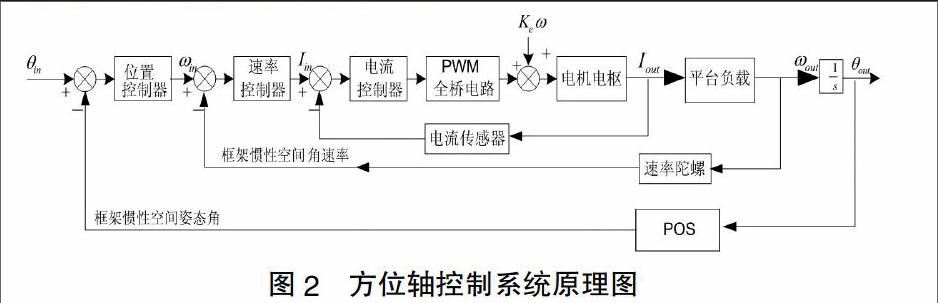
根据磁悬浮无机械接触,摩擦力矩小,定轴精度高等特点,因此电机的控制系统采用三闭环控制回路,即电流环、速率环和位置环的控制结构。其控制原理图如图2所示。
图2 方位轴控制系统原理图
电流回路通过电流传感器获取电枢电流信号,与电流给定值进行动态比较,以抵消负载转矩作用以及惯量变化所带来的影响[3]。
速率回路通过速率陀螺获取框架运行的角速率,得到的转速信号作为速率环控制器的负反馈,与转速参考值进行比较,产生适当的电流参考值来控制后续闭合的电流环。其主要目的是隔离基座干扰角运动。
位置环是整个伺服系统设计的关键,主要是利用POS获取遥感相机的姿态信号,得到的姿态信号作为位置控制器的负反馈,位置控制器输出的值与陀螺测量值进行复合,通过电流控制器产生驱动电流,使力矩电机带动相机框架进行相应补偿运动,调整相机姿态。其主要目的是驱动平台跟踪参考航向。
3 方位轴控制系统硬件设计
由于方位轴的无接触的特性,因此为避免有刷电机电刷带来的干扰,本文选用的是永磁同步无刷直流电机。无刷电机换向表的产生,采用角度传感器获得位置信息,通过位置信息模拟电机的霍尔换向表。角位置传感器采用无接触式的光栅尺。而速率、姿态角的测量则是通过安装在方位框内的MEMS陀螺和高精度的POS系统测量,电流反馈量的测量是通过安装在电机上的电流传感器获取。然后在DSP中进行控制环路的计算,产生电机控制的PWM波,经功率放大后与换向表共同控制无刷直流电机。
3.1 FPGA测角系统
磁悬浮稳定平台方位轴的测角装置采用光栅尺位移传感器,其输出为数字脉冲信号,具有检测范围大、检测精度高、响应速度快、无物理接触等特点。光栅尺主要是由读数头、主尺和接口组成。主尺安装在方位轴上,通过摩尔条纹原理测量方位轴端角位移[4]。光栅尺选用英国Renishaw公司的增量式RGH22系列,其光栅尺栅距为20μm,通过数字细分后可以实现数字分辨率达到1μm。
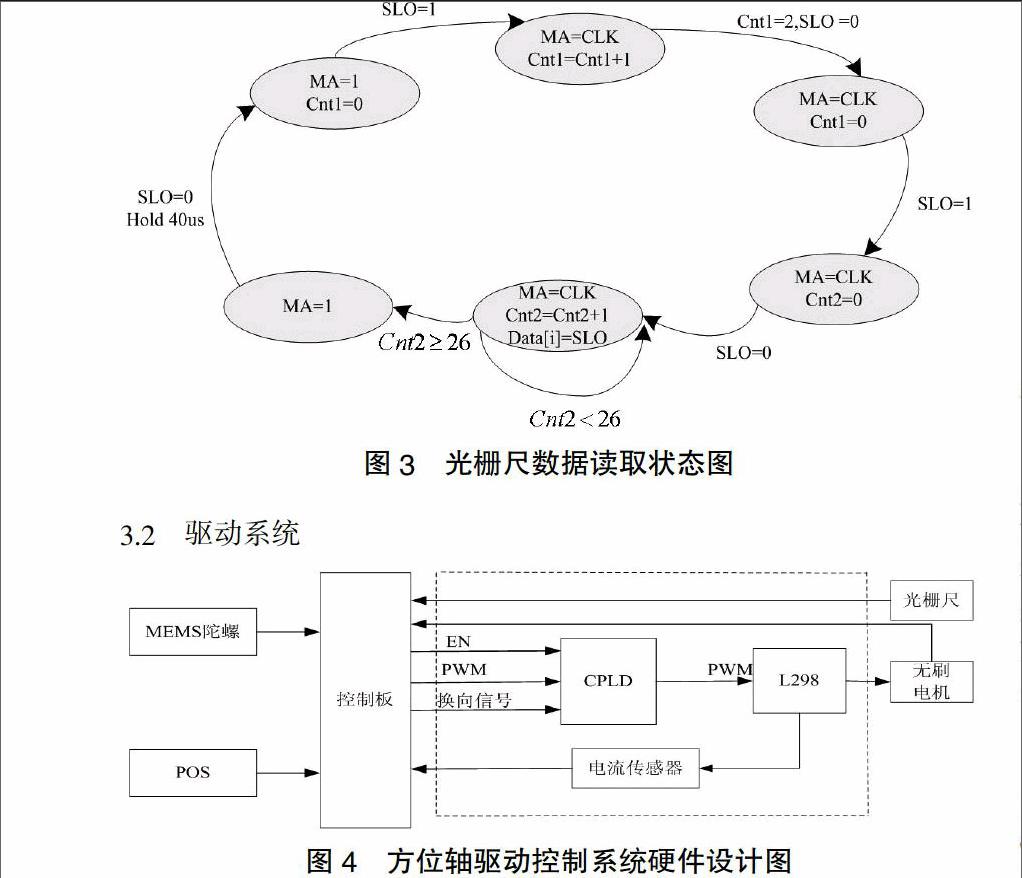
光栅尺一般采用BiSS-C串行通信协议进行编码。BiSS协议是为了从编码中器获得位置数据一种快速同步串行通信协议。该通信波特率可以达到10Mbps,它是由两对差分信号线组成:MA和SLO[5]。MA是主机给从机的时钟信号;SLO是从机到主机传输位置数据,同步于MA。因此在硬件电路设计时可以采用差分转化芯片Max3290,转成FPGA可使用的TTL电平信号。图3为FPGA读取光栅尺的状态转化图。取MA的时钟信号为2MHz,Cnt1为CLK赋值给MA时开始计数MA上升沿次数;Cnt2和i的取值相同。此状态转换读取位置量为18位、1位错误位、1位警告位和6位CRC校验位,数据读取结束后需保持40us的低电平,才能进行下一次数据的采集。
图3 光栅尺数据读取状态图
3.2 驱动系统
图4 方位轴驱动控制系统硬件设计图
方位电机驱动系统设计方案如图4所示。控制系统以CPLD为核心器件,接收控制板发来换向信号、PWM和使能信号EN,发送给电机驱动芯片L298实现无刷电机的换向和转速的控制。
控制板FPGA通过电流传感器采集电机电枢电流信号、通过MEMS陀螺采集方位轴的旋转角速率信号、通过POS平台系统采集到有效载荷的姿态角信息、通过光栅尺采集方位轴旋转的角度信号根据角度信号。FPGA将采集到的电流、速率、姿态等信息,通过并口发送给DSP,通过串口发送给上位机。DSP运算稳定回路的控制运算,得到控制电机的PWM信号,实现回路的稳定控制。上位机将采集数据进行直观的显示。
3.3 软件系统开发
方位轴控制系统的软件开发分为FPGA和DSP两部分的进行.FPGA采用的是Xilinx公司的ISE9.1设计,DSP采用的是TI公司的CCS3.3进行软件开发。具体的开发流程图如图5所示。
(a)FPGA软件开发流程图 (b)DSP软件开发流程图
图5 系统软件开发流程图
4 结论
本文首先介绍了三轴磁悬浮稳定平台的系统组成,然后就磁悬浮无机械接触、摩擦力矩小、定轴精度高等特点,设计了磁悬浮稳定平台方位轴端的三闭环控制回路,轴端驱动电机选择永磁同步无刷直流电机,减少机械电刷带来的干扰,无刷电机的换向需要位置信号模拟霍尔换向表,其中位置的测量装置采用无机械接触的光栅尺。最后描述方位轴的控制系统的硬件设计方案。该方案的设计能够满足系统的任务指标。
【参考文献】
[1]沈颖凡,赵嫔娅,陈祖金.航空吊舱稳定平台结构设计[J].航空兵器,2010(3):61-64.
[2]宋玉旺,韩邦成,魏学敏,房建成.大中型磁悬浮控制力矩陀螺的框架优化设计方法研究[J].载人航天,2012,18(4):1-7.
[3]王丽博.机载光电吊舱控制系统的研究及应用[D].河南科技大学,2011.
[4]姜礼杰,王勇,徐建,刘建华.基于STM32微处理器的光栅信号处理方法的研究[J].机床与液压,2014,42(7):56-58.
[5]肖鲲,王莉娜.基于FPGA的BiSS协议关电编码器通信模块设计[J].电子测量技术,2008,31(7):188-191.
[责任编辑:王楠]
