机载脉冲多普勒雷达的自适应旁瓣对消实现方法
2016-04-26郝志梅
朱 明,郝志梅
(中航工业雷华电子技术研究所,江苏 无锡 214063)
机载脉冲多普勒雷达的自适应旁瓣对消实现方法
朱明,郝志梅
(中航工业雷华电子技术研究所,江苏无锡214063)
摘要:简要介绍了自适应旁瓣对消的基本原理。重点研究了自适应旁瓣对消在机载脉冲多普勒雷达中的工程实现方法,该方法打破了自适应旁瓣对消目前只能应用于采用低重脉冲重复周期的脉冲多普勒雷达的限制。通过对自适应旁瓣对消结果的分析,表明该方法完全能够满足现有机载脉冲多普勒雷达抗有源旁瓣干扰的需求。
关键词:自适应旁瓣对消,机载脉冲多普勒雷达,直接矩阵求逆,脉冲重复周期,DSP
0 引言
面对越来越恶劣的战场电磁环境,机载雷达抗干扰问题显得愈加重要,机载雷达抗干扰性能直接关系到飞机作战任务的完成效果。当雷达处于较强的有源干扰环境时,干扰信号从天线的旁瓣进入接收机的概率是极高的,现代机载雷达必须具有自适应抑制干扰的能力。抑制从天线旁瓣进入接收机干扰的一种方法是采用极低副瓣天线,但是极低副瓣天线的研制极为困难,成本太高,而且随着干扰技术的进步,干扰有效功率不断增强,只靠极低副瓣天线也难以有效地抑制较强的旁瓣干扰。因此,在实际应用中,可以采用自适应波束形成技术或自适应旁瓣对消技术来对抗强有源干扰。自适应波束形成技术需要较多的通道资源(硬件),而现有的机载脉冲多普勒雷达通道数目有限,较难实现。自适应旁瓣对消技术则可以利用现有的通道资源达到对抗旁瓣干扰的目的,不用增加额外的设备,只增加了一些运算量,易于实现。本文研究基于机载脉冲多普勒雷达的自适应旁瓣对消的工程实现方法,通过该方法的实时处理结果和实时保存数据的对比分析来说明该方法能够有效对抗有源旁瓣干扰。
1自适应旁瓣对消技术原理
自适应旁瓣对消(Adaptive Sidelobe Cancellation)系统的阵列天线按照一定的规则可以分为主天线和辅助天线,下页图1为主天线和辅助天线的接收方向图。主天线接收方向图的主瓣(主波束)增益较其旁瓣(副瓣)增益要高出许多倍。假设某雷达主天线按等副瓣设计,各个副瓣的增益相近,主瓣增益比副瓣增益高25 dB。在一定的小角度范围内可以假定辅助天线的增益与主天线旁瓣的增益相同。
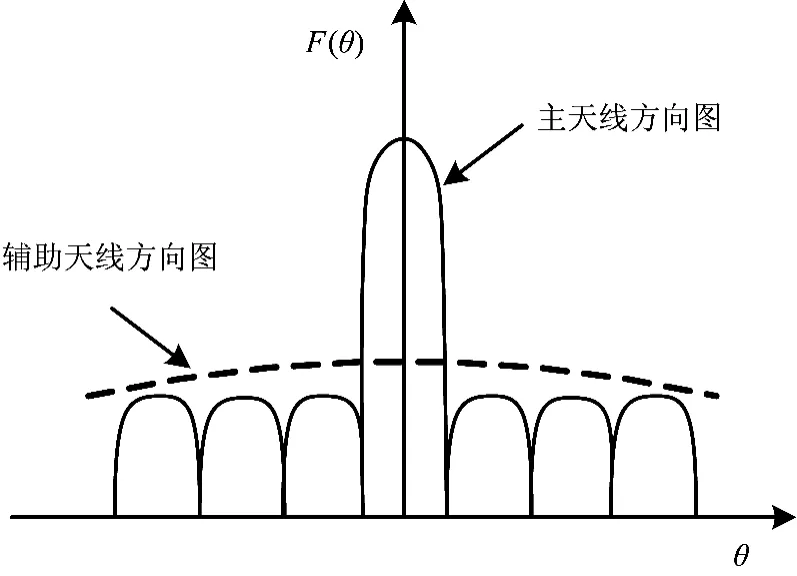
图1 主辅天线接收方向图
当有目标回波信号从主天线的主瓣进入接收机的主通道时,同时从辅助天线进入接收机的辅助通道的目标回波信号要小25 dB左右,也就是说进入辅助天线的目标信号对自适应旁瓣对消的影响可以忽略。当有干扰信号从主天线的旁瓣进入接收机时,通过自适应旁瓣对消处理后的主天线目标回波信号几乎没有损失,而通过主天线旁瓣进入的干扰信号被消除了,从而实现了旁瓣干扰抑制。图2给出了自适应旁瓣对消系统的原理图。
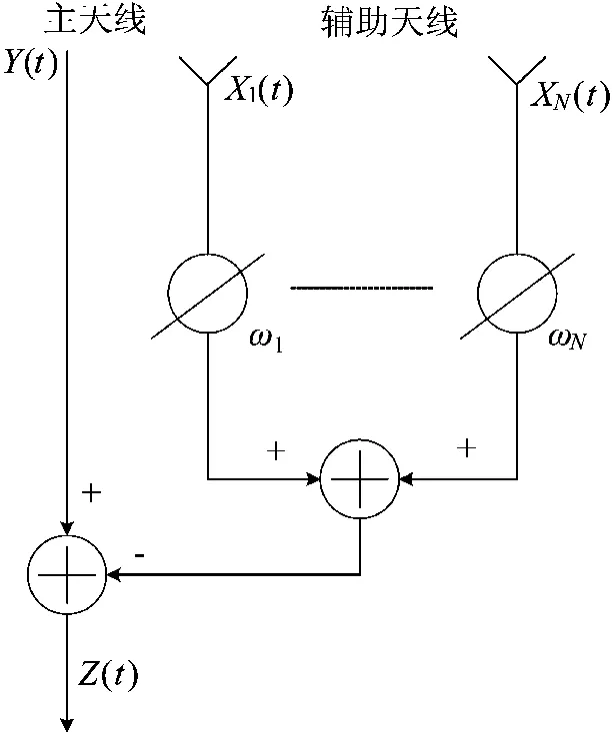
图2 自适应旁瓣对消原理图
设主天线的接收信号为:Y,N个辅助天线的接收信号为:X1,X2,…,XN,则加权对消后输出为:

如果对消输出信号中不含有任何从天线旁瓣进入的干扰信号,则根据正交投影定理,输出信号Z应与辅助天线的接收信号没有相关性,即:
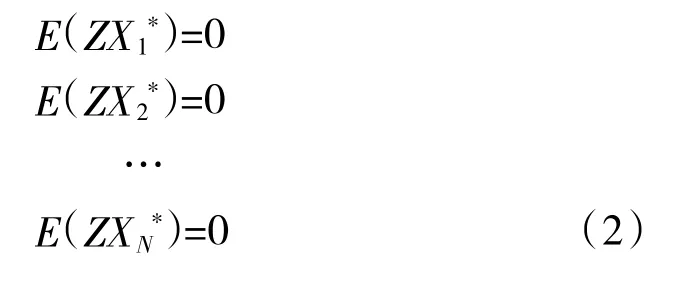
式中:加权系数ω1,ω2,…,ωN为复数。把式(1)代入式(2)中,得到:
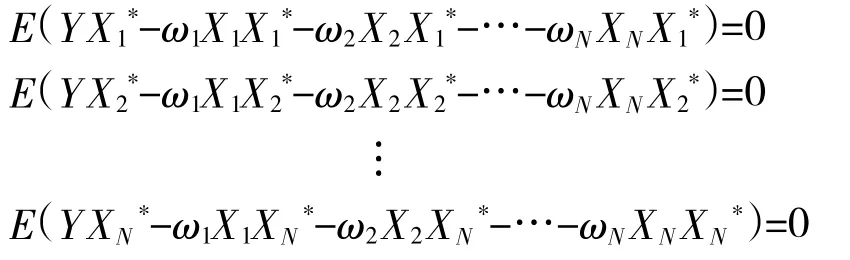
整理得:
若Xn=[X1,X2,…,XN]T,W=[ω1,ω2,…,ωN]T,则式(3)可以表示为:

设M=E[Xn*XnT]为辅助天线的自相关矩阵;R= E[YXn*]为主天线与辅助天线的互相关矩阵,式(4)可写成:

因此

式(6)为著名的Wiener-Hopf方程,满足Wiener-Hopf方程的W解,能保证自适应旁瓣对消系统输出信号不含有旁瓣干扰信号,使对消剩余功率最小。
自适应旁瓣对消处理可以分为两个过程:训练过程和工作过程。通过某种自适应算法对接收信号求得自适应旁瓣对消最佳权向量,此过程称为训练过程。从上面的推导可以看出,该过程是自适应旁瓣对消系统算法的核心部分。工作过程则是将该权向量应用到自适应旁瓣对消系统中,对雷达接收信号向量进行加权求和计算。
2实际工程实现方法
机载脉冲多普勒雷达的工作模式是在一个脉冲重复周期(PRI)中,先发射信号,发射完毕后开始接收信号并处理。为了叙述方便,假设在雷达接收信号的整个时间里,干扰是一直存在的,则雷达接收信号包括回波信号、干扰信号和噪声。回波信号可以是杂波和目标回波信号。如前所述,目标回波信号对自适应旁瓣对消的影响不大。当机载脉冲多普勒雷达下视的时候,形成的主杂波功率较高(可能和干扰一个量级),而且无方向性。如果其被包含在样本数据中参与自适应旁瓣对消权系数计算,根据自适应旁瓣对消性能分析,自适应旁瓣对消必定受影响。因此,在实际应用中,必须对选取的样本数据进行主杂波抑制。自适应旁瓣对消所需要的样本数据是通过对训练过程时间内的接收信号进行采样得到的。
假设主天线对准目标,干扰从其旁瓣进入。如果能够选取到没有回波信号而只有干扰信号的样本数据,则主辅天线的干扰相关性最强,根据自适应旁瓣对消性能分析,自适应旁瓣对消的效果最理想。文献[3-5]都提出将雷达的PRI分为工作期和休止期。在休止期,即雷达最大量程的末端取干扰样本数据,得到的干扰样本数据是“干净的”。理由是该距离段在雷达的威力范围之外,即不可能有回波信号在内,这样可以避免把回波信号选取到干扰样本数据中。文章所提不够全面,文中所提的PRI(低重波形)相对较长,距离不模糊,所以可以将PRI如此划分。但对于距离模糊的PRI(高重和中重波形)并不适用,也就是说在采用高重或者中重PRI的机载脉冲多普勒雷达系统中(在现有机载脉冲多普勒雷达中占多数),不存在前面所提“休止期”,而获得的样本数据始终包含回波信号和干扰信号,样本数据不“干净”,不能按照式(6)直接完成自适应旁瓣对消。另外一种情况是使用低重PRI,距离不模糊的情况下,如果遇到同步延时干扰,干扰信号与回波信号都出现在工作期,在休止期只剩下噪声,就不能获得干扰样本数据,无法完成自适应旁瓣对消。根据自适应旁瓣对消性能分析,即使作为样本数据的回波信号包含目标回波信号和杂波,只要干信比(干扰功率和目标信号功率之比值)足够大,通过本文的工程实现方法,自适应旁瓣对消的效果完全能够满足实际应用的要求。一般情况下自适应旁瓣对消对目标回波信号影响较小,所以常用干扰对消比来衡量自适应旁瓣对消性能。干扰对消比指的是自适应旁瓣对消前干扰功率和自适应旁瓣对消后干扰功率之比值。
实际工程实现中要求自适应旁瓣对消系统必须具有实时特性。实时特性指的是当前雷达帧计算得到的自适应旁瓣对消权向量应用于当前雷达帧的自适应旁瓣对消加权求和,这点对于波束捷变的相控阵雷达尤为重要。为了满足系统实时性的要求,自适应旁瓣对消算法必须快速收敛,因此,采取直接矩阵求逆(DMI)方法来计算自适应旁瓣对消权向量。雷达帧由若干个PRI组成,具体个数由雷达决策,从而决定了雷达帧时间长度。
自适应旁瓣对消工作时序如图3所示。在一个雷达帧内必须完成自适应旁瓣对消权系数计算和自适应旁瓣对消权系数应用。训练过程对应着自适应旁瓣对消权系数计算期,而工作过程对应着自适应旁瓣对消权值应用期。
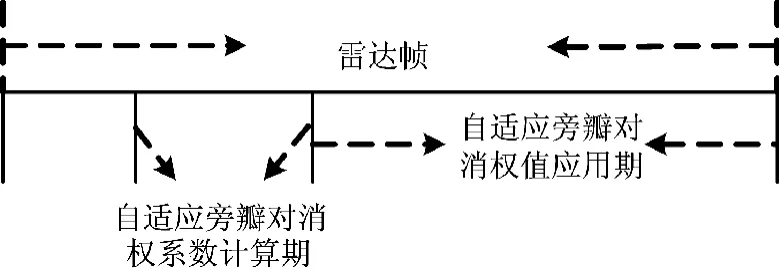
图3 自适应旁瓣对消工作时序
图3中,雷达帧刚开始的一段时间没有标注,其主要作用是保证上一雷达帧的回波信号不会出现在自适应旁瓣对消权系数计算期。自适应旁瓣对消权系数计算期主要是完成训练样本选取,主杂波抑制和权值计算。自适应旁瓣对消权值应用期是使用权值实时生成对消后的主通道数据,以便参与后续信号处理。机载脉冲多普勒雷达一般采取三通道处理,以和通道作为主通道的输入,差通道和保护通道作为两路辅助通道的输入,经过自适应旁瓣对消处理后输出新的主通道数据。
训练样本选取主通道和两路辅助通道的时域样本,主要考虑样本选取的脉冲数量,即最佳采样快拍数的选取。不同随机信号的最佳采样快拍数是不同的,随机性越强的信号,必须选取较大的快拍数,干扰对消比才能达到平稳,因此,其最佳采样快拍数较随机性弱的信号大。一般情况下,选取雷达积累点数的1/8就足够了。
主杂波抑制:为了使得干扰样本数据尽可能“干净化”,必须去除主杂波的影响。首先要估计出主杂波的多普勒频率fd,一般使用主杂波计算公式估计即可,见式(7)。

其中v为载机地速,ψ为雷达天线指向(视线)与平台运动方向之间的夹角,而θ表示方位角,φ为俯仰角。
估计出主杂波多普勒频率fd后,可以分别将主通道和两路辅助通道的训练样本搬移到零频附近。然后利用MTI中常用的二次对消器(即三脉冲对消),形成对主杂波的凹口滤波器,来消除主杂波对训练样本的影响。二次对消器公式如下:

权值计算:采用直接矩阵求逆(DMI)算法来获取最优权值,同时为了加快其收敛性,抑制自适应旁瓣对消后天线副瓣的抬高,采用了“对角加载”技术,即选取一个合适的正数α,用M+αI代替M,即M1=M+αI,I为单位矩阵。再进行矩阵求逆并由此计算得到最优权Wopt。

自适应旁瓣对消权值应用:自适应旁瓣对消的输入,Y代表主通道,X1代表辅助通道1,X2代表辅助通道2;Z是自适应旁瓣对消输出。

由于直接矩阵求逆(DMI)算法涉及的计算量大,如高阶矩阵求逆,所以采用数字信号处理器(Digital Signal Processor,DSP)来构成自适应旁瓣对消数字系统。DSP是专门用来实现各种数字信号处理算法,其特点是适合于数值计算密集型的应用。在自适应旁瓣对消系统中,采用通用的DSP以及FPGA来实现具有较强通用性的信号处理机平台,具有方便性、灵活性、可编程性强等特点。DSP采用AD公司的ADSPTS201,该芯片峰值浮点运算能力达到36亿次/s,有64位总线,有4对高速链路口,内部存储容量为6×4 Mbit,支持DMA传输方式。自适应旁瓣对消工程实现中的其他特点,诸如数据汇集量和运算量比较大,TS201都能很好地满足。而FPGA的主要作用是完成原始数据采样后放入RAM中,并通知TS201通过DMA方式获取原始采样数据。接下来由TS201完成自适应旁瓣对消的所有功能,见图4所示。
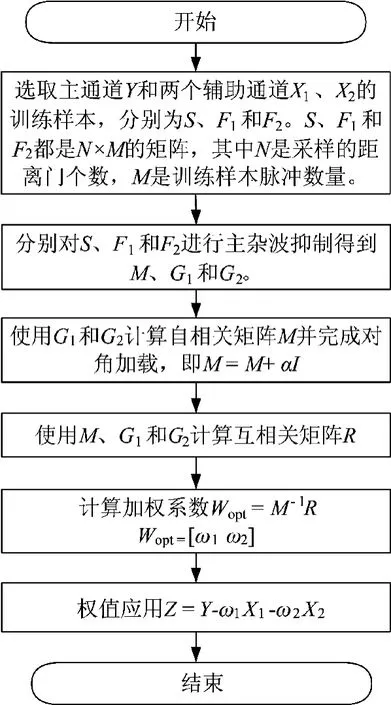
图4 自适应旁瓣对消软件实现流程图
3结果分析
通过某雷达自适应旁瓣对消系统的实时运行来说明其对有源旁瓣干扰的抑制能力。雷达稳定跟踪单目标后在天线旁瓣加入单个干扰源,自适应旁瓣对消系统不启动的情况下,雷达受到旁瓣干扰而无法稳定跟踪目标。而在自适应旁瓣对消系统启动后,同样实验条件下,雷达始终能够稳定跟踪单目标,说明自适应旁瓣对消系统有效抑制了干扰。为了便于更直观地对比分析,将自适应旁瓣对消系统雷达帧的主通道输入的时域数据和自适应旁瓣对消输出的时域数据转化为MATLAB数据格式文件(.mat文件)保存,通过MATLAB画出自适应旁瓣对消前后时域信号图和频域信号功率图。频域信号由对应时域信号相参积累后经FFT变换后得到。下页图5(a)为采用高重PRI,自适应旁瓣对消输入的主通道目标所在距离门时域信号图。经过自适应旁瓣对消系统实时处理后的输出见图5(b)。图5(c)为采用高重PRI的频域信号功率图,X轴代表归一化的频率门,Y轴代表信号功率(单位为dB)。从图中可以看出对消前主通道受到频域条带干扰,频域条带干扰最大功率(在图5 (c)标出)是96.19 dB,对消后对应最大频域条带干扰位置的功率(在图5(c)中标出)是63.31 dB,干扰得到有效抑制,频域条带平均干扰对消比达到29 dB。被频域条带干扰淹没的目标得以显现,即图5(c)中标出的X值为0.116 2的点。图6 (a)为采用中重PRI,自适应旁瓣对消输入的主通道目标所在距离门时域信号图。经过自适应旁瓣对消系统实时处理后的输出见图6(b)。图6(c)为采用中重PRI的频域信号功率图,X轴代表归一化的频率门,Y轴代表信号功率(单位为dB)。从图中可以看出对消前主通道受到频域条带干扰,频域条带干扰最大功率(在图6(c)中标出)是61 dB,对消后对应最大频域条带干扰位置的功率(在图6 (c)中标出)是33.04 dB,干扰得到有效抑制,频域条带平均干扰对消比达到28.5 dB。被频域条带干扰淹没的目标得以显现,即图6(c)中标出的X值为0.578 1的点。
4 结论
本文将自适应旁瓣对消技术应用于机载脉冲多普勒雷达系统中,同时对主杂波进行抑制以提高自适应旁瓣对消性能。从文中方法的叙述和结果分析可以得出,该方法能够有效地抑制有源旁瓣干扰,有较快的运算速度和较强的实时性,在实际工程中得到了应用。
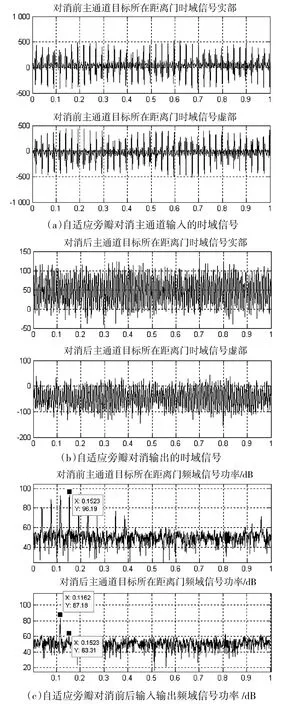
图5 高重PRI,自适应旁瓣对消输入和输出对比图
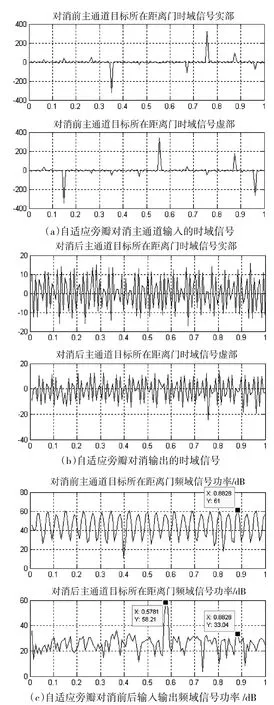
图6 中重PRI,自适应旁瓣对消输入和输出对比图
参考文献:
[1]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002.
[2]龚耀寰.自适应滤波[M].北京:电子工业出版社,2003.
[3]李波.自适应旁瓣对消在数字阵列雷达中的工程实现[J].电子科技,2012,25(4):97-98.
[4]马晓静,刘育才.自适应旁瓣对消技术及其在数字阵列雷达中的应用[J].雷达与对抗,2010,30(3):28-29.
[5]孟兵.相控阵雷达自适应旁瓣相消技术的研究[D].南京:南京理工大学,2008.
[6]李琪.某数字阵列雷达旁瓣对消系统设计与实测数据分析[D].西安:西安电子科技大学,2011.
One Adaptive Sidelobe Cancellation Method of the Airborne Pulse Doppler Radar
ZHU Ming,HAO Zhi-mei
(AVIC Leihua Electronic Technology ResearchInstitute,Wuxi 214063,China)
Abstract:This article briefly introduces basic principle of adaptive sidelobe cancellation and focuses on the research of one adaptive sidelobe cancellation engineering method of the airborne pulse doppler radar.This method breaks the limitation which is that adaptive sidelobe cancellation currently can only be applied to the pulse doppler radar with low pulse repetition interval.The analysis of adaptive sidelobe cancellation results shows that this method can completely meet the needs of the existing airborne pulse doppler radar against active sidelobe jamming.
Key words:adaptive sidelobe cancellation,airborne pulse doppler radar,direct matrix inverse,pulse repetition interval,Digital Signal Processor
作者简介:朱明(1982-),男,江苏无锡人,硕士,工程师。研究方向:雷达信号处理。
收稿日期:2015-02-25修回日期:2015-04-17
文章编号:1002-0640(2016)03-0140-05
中图分类号:TN957
文献标识码:A
