行星齿轮机构运动演示教具设计与试验
2016-04-23鲍海峰苗剑飞肖景龙何金健
鲍海峰,苗剑飞,肖景龙,何金健,刘 坤
(安徽农业大学 工学院,安徽 合肥 230036)
行星齿轮机构运动演示教具设计与试验
鲍海峰,苗剑飞,肖景龙,何金健,刘坤
(安徽农业大学工学院,安徽合肥230036)
摘要:为帮助学生理解行星齿轮机构在不同工作状态下的运动形式,并验证行星齿轮机构的传动比公式,研究设计了一套包括机械机构和采集系统两部分的行星齿轮机构运动演示教具。行星齿轮机构由12V电机驱动,通过传感器及自编的LabVIEW数据采集程序实时获取机构的运动参数,计算出实际传动比,并与理论数据对比。试验表明,该教具设计合理,小巧便携,能够直观演示行星齿轮机构运动状态。
关键词:行星齿轮机构;演示教具;LabVIEW;采集系统
行星齿轮机构的转动轴线是不固定的,具有三条转动轴允许动力输入/输出,可实现多种传动形式,因此传动比计算也较定轴齿轮更为复杂。杨照山[1]等人曾对行星齿轮传动的特点做过详细的介绍。黄士扎[2]对自动变速器行星齿轮变速机构一体化教学进行过探讨,总结了行星齿轮在教学中的难点所在。但上述研究并未设计制造出具体的实物。
为便于教师上课讲解和学生理解,本文设计了一套行星齿轮机构运动演示教具。该装置以一套2K-H型行星齿轮机构为主体,并配有驱动电机,能够演示行星齿轮结构的两种运动形式。同时,利用齿轮转速传感器、USB数据采集器和基于LabVIEW软件编制的数据采集程序,可以采集并显示太阳轮和行星架转速,并根据所测数据自动计算传动比,同时与按公式计算出的理论值相对比,从而验证周转轮系传动比计算公式。
1行星齿轮机构运动演示教具的机械结构设计
1.1基本结构
行星齿轮机构可分为太阳轮、行星轮、行星架、齿圈四部分(如图1),行星轮安放在行星架上。太阳轮、行星架、齿圈均可作为主动件、从动件及固定件,因此根据机构中主动件、从动件、固定件的不同分配方式,行星齿轮机构共有6种运动方式[3]。该教具采取齿圈固定,再分别以太阳轮或行星架作为主动件的方式,演示2K-H型行星齿轮机构的2种运动状态。其传动比计算公式如下。
(1)
(2)
其中Z1和Z3分别为太阳轮和齿圈的齿数[4-5]。
装置主体机械结构包括行星齿轮机构、机架、底板、电机、测速齿轮等。行星齿轮机构齿圈外侧焊接有支架,支架通过螺栓固定于底座上,行星轮机构两侧分别有一个12V驱动电机,电机通过电机支架固定于底座上,A电机通过一根阶梯轴与行星架相连,B电机通过另一根轴与太阳轮连接。两轴上均安装有用于测量转速的齿轮,齿轮上方安装测速传感器。教具总体结构如图2所示。

图1 行星齿轮机构四部分图
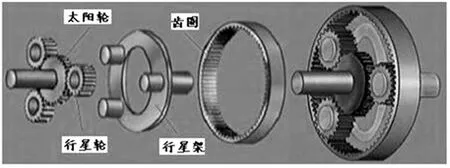
图2 教具结构示意图
2行星齿轮机构运动演示教具测控系统设计
2.1测控系统硬件设计
2.1.1硬件结构组成测试系统的功能主要是采集数据并对采集所得数据进行处理和显示。如图4所示,构建测试系统硬件结构。

图3 测试系统硬件结构
当接通电源时,两个测速齿轮会分别随各自轴转动,轮齿将切割传感器探头部位的磁场,由于磁通量的变化,测速传感器会连续发出脉冲信号,脉冲信号经转速变速器被转换为1~5V模拟电压,USB数据采集器采集该模拟信号,再输入PC端。
2.1.2数据采集系统硬件选型教具采用乐清佑科电气有限公司的SC12-20K型齿轮转速传感器,南京三盟公司SMGV60-100R型转速变送器,北京阿尔泰公司USB5936型USB数据采集器。各硬件具体性能参数如表1。
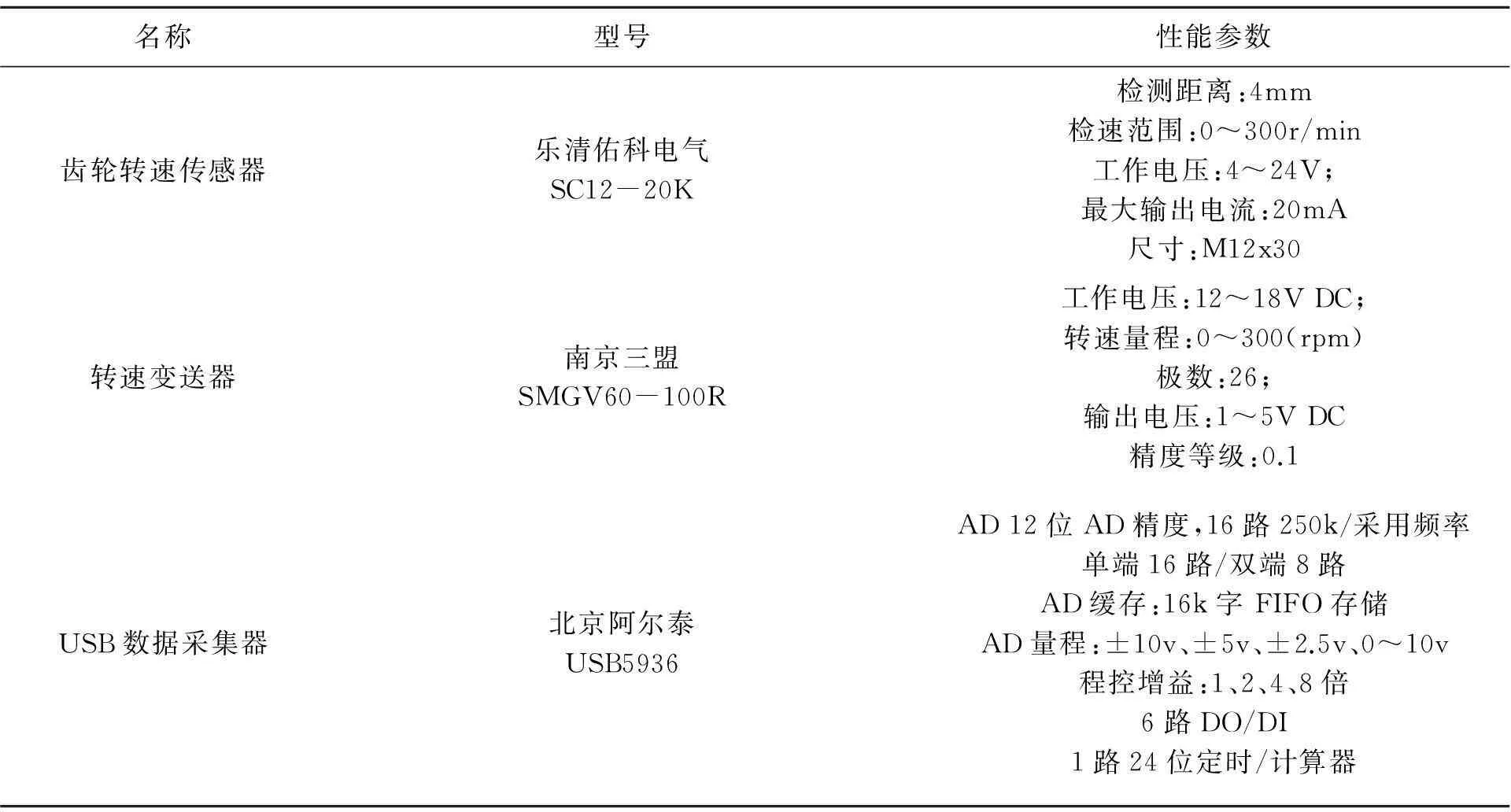
表1 硬件型号和参数
2.2数据采集程序设计
采集系统基于图形化编程语言LabVIEW编制,由于其GUI设计风格具有良好的人机交互式性,编出的界面精美实用,已经广泛的应用于测试与控制行业。图4为数据采集程序显示主界面。数据采集主程序能够使操作者在演示教具的时候,同时观察采集到的数据,并调整太阳轮或行星架的主动方式。操作者也可以在交互界面上输入所使用行星齿轮机构的具体参数,通过内置程序算法计算出理论传动比等数值[6]。
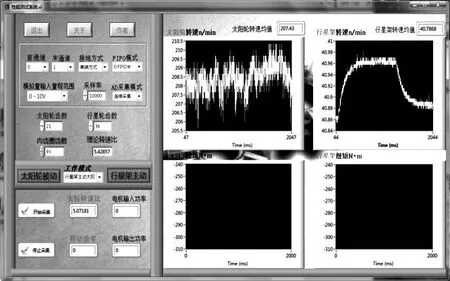
图4 数据采集界面图

图5 数据采集程序框图
数据采集程序的主要作用在于将采集到的模拟电压信号转换为真实的转速信号显示出来。北京阿尔泰公司为USB5936采集卡提供了大量的LabVIEW调用库函数节点(CLF)。在编制采集程序代码时,用户可以在该节点的配置对话框里,对USB5936采集卡的驱动函数和参数进行选取和设置,从而驱动采集卡完成数据采集,再利用LabVIEW表格读写工具函数编写程序,实现对数据的存储和读取。图5为编程框图。
3教具试验
按照以上机械结构、采集硬件、数据采集程序的设计方案,搭建了如图6所示的教具实物,并使用行星齿轮机构(齿圈齿数为93,太阳轮齿数为21,行星轮齿数为36)进行了试验。

图6 教具实物
试验通过采集程序获得两种工作状态下运动参数,并根据公式(1)和(2)分别计算两种运动状态的理论传动比,具体如表2所示。通过对比可见,装置误差较小,基本实现设计目标。

表2 试验数据
4结论
本文对行星齿轮机构运动演示教具的机械结构及测控系统进行了设计,并制作教具实物一件。该教具小巧便携,适合老师带入课堂进行现场演示。教具放在讲台上,在交换的演示过程中,可以演示行星齿轮机构两种不同的运动状态。装置与电子软件相结合,通过软件可直接准确的显示出输入、输出转速及传动比,进而可验证周转轮系传动比公式。
该教具适合机械类专业教学演示,趣味性强,对学生的学习将有一定帮助,同时可激发同学们的创新意识,因此具有较大的实用价值。
参考文献:
[1]杨照山,陈明.渐开线行星齿轮传动的研究现状及发展方向[J].中国纺织大学学报,1998,24(5):27-31.
[2]黄仕扎.自动变速器行星齿轮变速机构一体化教学探讨[J].广西教育C:职业与高等教育版,2012,15(4):146-147.
[3]东南大学机械学学科组.机械原理(第7版)[M].北京:高等教育出版社,1997.
[4]龚文资.单排行星齿轮机构的运动分析[J].制造业自动化,2011,33(21):154-156.
[5]刘开昌,叶仲和,蓝兆辉.机械原理学习指导[M].上海:上海交通大学出版社,2006.
[6]杨乐平,李海涛,赵勇.LabVIEW 高级程序设计(第2版)[M].北京:清华大学出版社,2003.
(责任编辑:李孟良)
Design and Experiment of the Demonstration Teaching Aids of Planetary Gear Mechanism Movement
BAO Hai-feng,MIAO Jian-fei,XIAO Jing-long,HE Jin-jian,LIU Kun
(School of Engineering, Anhui Agricultural University, Hefei 230036,China)
Abstract:In order to help the students to understand the movement of planetary gear mechanism in different working conditions, and to verify the formula of transmission ratio of planetary gear mechanism, we have researched and designed a set of demonstration teaching aids of planetary gear mechanism, including the mechanical structure and data acquisition system. The planetary gear mechanism was driven by motor for 12V. It was also accessed to the real-time motion parameters of the mechanism through the sensor and the LabVIEW data acquisition program of itself. This way, the actual transmission ratio is figured out compared with the theoretical data and then to be compared with the theoretical data. The experiment clearly illustrates that The teaching aids are reasonable in design, portable and intuitive in demonstration of the planetary gear mechanism movement.
Key words:The planetary gear mechanism;Teaching aids;LabVIEW;Data acquisition system
中图分类号:TH122
文献标识码:A
文章编号:1673-8772(2016)01-0061-04
作者简介:鲍海峰(1993-),男,安徽省长丰县人,在读本科生,主要从事机械设计制造研究。
基金项目:安徽省级大学生创新创业训练项目(AH201410364013)。
收稿日期:2015-07-01