基于多分辨实体的交互一致性控制方法
2016-04-22杨慧杰
杨慧杰,谷 雨
(中国电子科学研究院,北京 100041)
杨慧杰(1984—),男,山西太原人,工程师,主要研究方向为信息系统建模与仿真、仿真支撑技术;
E-mail: yhj84@qq.com
谷 雨(1984—),男,河北高邑人,工程师,主要研究方向为综合电子信息系统建模与仿真。
工程与应用
基于多分辨实体的交互一致性控制方法
杨慧杰,谷雨
(中国电子科学研究院,北京100041)
摘要:多分辨建模是解决复杂系统仿真的重要手段,其关键问题之一是不同分辨率实体之间交互时的一致性控制。本文以多分辨率实体法为基础,提出了一种交互一致性控制的方法, 从多分辨率实体(Multi-Resolution Entity,MRE)建立、属性映射、并发交互控制三个方面来解决一致性控制问题。实际应用表明,该方法是可行和有效的。
关键词:多分辨率建模; 多分辨率实体; 一致性控制
0引言
由于现代战争的战场空间多维立体、参战力量多元、指挥关系复杂,不同军兵种之间还存在各种协同与联合,对战争仿真系统提出了更多更新的挑战。目前,多分辨率建模技术被认为是解决战争系统复杂性与计算资源有限性之间矛盾的有效途径。
多分辨率建模是指为同一个现象建立具有不同分辨率的一个模型、一族模型或者是二者的组合来共同描述被模拟对象的特征[1-2]。聚合解聚法[3]是多分辨率建模常用的方法之一,但是该方法在解决模型一致性问题方面存在较大的困难,同时也会带来链式解聚、网络拥塞等多种问题。
本文基于多分辨率实体法提出了一套交互一致性控制方法,从多分辨率实体的建立、属性映射、并发交互控制三个方面来解决多分辨率建模中的一致性维护问题。
1问题的提出
在战役级的作战模拟训练系统中,对战争的仿真是其核心功能。为了降低计算量,提高仿真效率,在满足应用需求的前提下,“坦克连”通常作为一个作战单元进行仿真,即低分辨率的聚合仿真,在这种情况下,聚合实体作为一个整体与其他实体和外部环境发生交互。然而,随着仿真的需要,聚合级的坦克连实体在某些情况下也需要以单车级的高分辨率实体进行计算。例如,当侦察机从空中对地面实施侦察时,需要详细获知每一辆坦克的位置和速度、当武装直升机发射反坦克导弹时也需要具体瞄准到一辆坦克而不是整个坦克连,这时,就需要将聚合级的坦克连进行解聚获得其中每一辆坦克的具体位置和速度。
实际情况是,在训练过程中,侦察、打击等需要进行解聚的情形出现的频率很高,如果采用传统的完全聚合解聚算法,频繁的进行聚合解聚计算,往往不能达到降低计算量的目的,反而会给系统带来更多的额外负担,同时,高分辨率的解聚实体并不需要被实际仿真和控制,而是仅仅具有某些属性特征即可,如可视性,能够被其他实体发现。因此,本文中采用了既可以满足仿真训练需求,计算量又相对较低的伪解聚算法,其基本思想是实体在聚合的低分辨率环境中被仿真和控制,并与其他实体发生交互,在解聚的高分辨率环境中仅仅被描述而不受控制。
2解决方案
本文所提出的一致性控制方法是基于多分辨率实体的,多分辨率实体法是指对同一仿真对象建立多个分辨率的模型,多个分辨率的模型同时存在[4]。以下以坦克连的建模为例,从多分辨率实体建立、属性信息的映射和并发交互控制三个方面描述该解决方案。
2.1多分辨率实体的建立
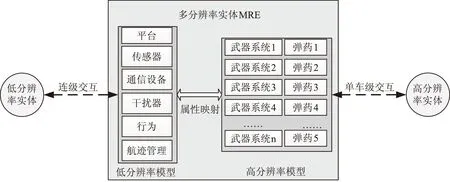
图1 坦克连MRE建立示意图
以坦克连整体作为一个多分辨率实体进行设计。基于组件化建模思想[5],坦克连MRE包括一个机动平台、一套探测系统、一套通信设备、一套行为模型和多套武器系统,在野战机动或指挥控制过程中作为连级低分辨率实体(Low-Resolution Entity, LRE)被仿真,在作为被探测目标、进行目标分配、射击过程中,则需将每套武器系统作为单车级的高分辨实体(High-Resolution Entity, HRE)进行仿真,由行为模型中的属性映射函数保证实现两个分辨率级别上属性的一致性。如图1所示为坦克连MRE的建立示意图,可以实现在低分辨率和高分辨率两个级别上分别被感知,MRE在任何情况下都可以提供这两个级别上的属性并保持一致性。当坦克连需要与高分辨率实体进行交互时,则以武器系统模型为基础,通过将平台模型、传感器模型等低分辨率模型的属性映射到高分辨率的实体上,满足高分辨率级别的交互需求。当需要与低分辨率的实体进行交互时,将各武器系统模型和弹药模型的属性映射到低分辨率的实体上(即坦克连),满足低分辨率的交互需求。
2.2属性信息映射
在多分辨率实体中,一个分辨率级别中的属性与另一个分辨率级别中属性的对应关系即为属性映射。为了实现高低两个分辨率级别中属性的相互对应,需要建立一对映射函数f1和f2。f1将低分辨率实体属性映射到高分辨率实体,f2则反向进行。
在本文的实现中,高低分辨率实体之间的属性及状态包括三类:非映射、直接映射和间接映射。
·非映射的属性及状态占所有属性和状态的很大部分,包括LRE实体名称、级别、上级实体名称、传感器属性、通信设备属性、探测结果、内部坦克队形、行为属性、毁伤模型属性、武器系统属性;
·直接映射的属性及状态包括坦克平台特征、速度;
·间接映射的属性及状态包括位置、弹药、自身毁伤情况、油料。
对于非映射的属性及状态,无需在LRE和HRE之间进行映射。毁伤模型的属性和武器系统属性描述了坦克武器性能及其对不同目标的杀伤能力,其他属性及状态描述了LRE的相关特征,在模型中不考虑坦克传感器和通信设备的损毁,同时坦克连各坦克之间的通信是一直畅通的。
对于直接映射,仅考虑同质实体的聚合,因此LRE和HRE的坦克平台特征和速度是一致的。平台特征包括平台的几何特征、光学特征、红外特征、电磁特征和抗打击特征,用于被感知和被打击时的计算。
间接映射中的弹药和自身毁伤情况描述了HRE坦克的属性和状态,则LRE的弹药数量和种类为当前可战斗的HRE坦克弹药之和,LRE的坦克数量为当前可战斗的HRE坦克数量之和。
间接映射中的位置映射是最重要的属性映射,即f1pos和f2pos的设计。从连级低分辨率实体位置属性到单车级高分辨率实体位置属性的映射按照队形控制算法进行[6],以左梯形队形为例,如图2所示。
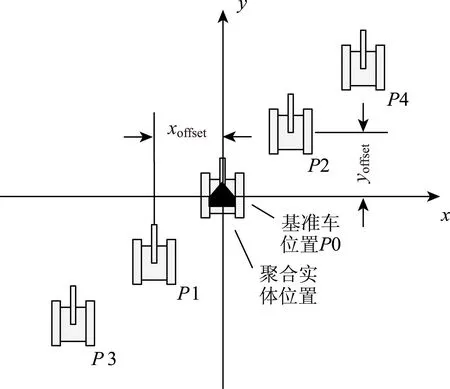
图2 左梯形队形示意图
第i辆车与基准车的相对位置Dioffset可以表示为:
(1)
通过坐标变换矩阵,将Doffset_i变换到地心第四坐标系中的相对位置
(2)
PECRi=PECR0+DECRioffset
(3)
计算位置点PECRi的高程信息,并将其修正为0,保证车辆位于地球表面,之后重新计算新的PECRi,即为第i辆车实际的位置。
而从单车级实体到连级实体的位置属性映射为取N个单车级实体位置的几何中心,即
(4)
其中,PM1(t)是在t时刻,连级高分辨率模型M1的位置,PEi(t)是t时刻,单车级高分辨率模型Ei的位置。
2.3并发交互控制
在本文的实现中,所有的交互都直接发生在低分辨率实体之间,涉及到高分辨率实体的交互(高低分辨率实体之间、高分辨率实体之间)则通过低分辨率实体间接进行。这样的交互控制规则保证实体按照时间的先后顺序逐条处理交互信息,避免不同分辨率级别上同时进行的交互产生相互影响,也就是说,在任何一个时间点,仅仅处理一条交互信息,只有将当前信息处理结束后才处理下一条信息,保证不同级别实体交互时间的一致性和交互内容的一致性。
以下从探测过程和射击过程来说明这类交互过程。
2.3.1探测过程中的交互
不同分辨率实体的探测过程示例见图3所示。坦克1连(TL1)和坦克2连(TL2)为具有多重分辨率级别的MRE,武装直升机Z为只有一个分辨率级别的MRE。
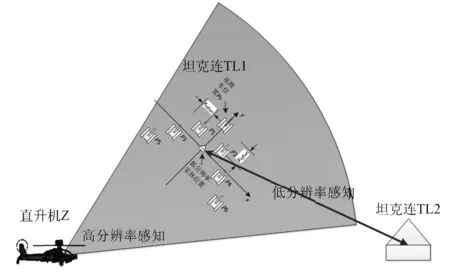
图3 不同分辨率实体的探测交互示意图
在同一仿真时间内,坦克1连对坦克2连采用聚合视角实现低分辨率感知,武装直升机Z对坦克1连采用解聚视角实现对每个单车级坦克的高分辨率感知。由于每个交互被一致地反映在所有分辨率上,所以MRE在时间上是一致的。MRE确定它感知另一MRE的分辨率级别,被感知的MRE能为感知MRE提供一致的观察视角。
如图3所示,是坦克1连发现坦克2连的过程。坦克1连LRE向坦克2连LRE发送探测交互,坦克2连需要向坦克1连提供实体内HRE的信息,因此根据需要提供的属性信息类型,调用基于队形控制算法的位置映射函数得到每个HRE的位置信息,调用其他属性映射函数得到其他参数信息,直接获取保存在实体中的位置信息,并将这写信息由坦克2连的LRE发送到坦克1连的LRE,坦克1连根据这些信息调用探测算法得到坦克2连各HRE的探测信息,完成一个完整的探测交互。
2.3.2射击过程中的交互
为了提高仿真可信度,使仿真结果更贴近真实的交战效果,以单车平台为基础的概率毁伤算法是较好的选择之一,因此坦克连实体的射击也必须以单车为基本分辨率进行,但是单车间的交互是通过连级低分辨率实体间接进行的。
如图4所示,坦克1连发现坦克2连之后,也就得到了目标单车级高分辨率实体的具体信息。类似于探测交互过程中坦克2连获取HRE属性参数的过程,坦克1连也通过映射函数等方式获取到自身每个HRE的属性信息,坦克1连的行为模型运行目标威胁评估和目标分配算法,为自身每个具备攻击能力的HRE分配一个最佳目标并射击。
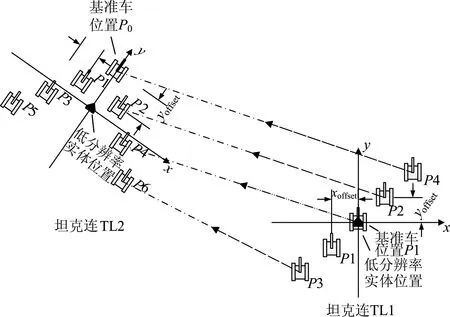
图4 坦克1连射击坦克2连示意图
每次射击交互发生后,自动启动毁伤模型,毁伤模型根据射击交互双方高分辨率实体的属性信息以及必要的环境信息,调用毁伤算法,确定目标的毁伤程度。
3结语
本文所提出的交互一致性控制方法,较好的解决了多分辨率建模中存在的问题。首先,由于没有聚合的过程,不会造成信息的丢失,因此也避免了聚合解聚过程中产生的一致性问题;其次,不同级别、不同分辨率实体交互时,不会产生新的实体,消除了链式解聚问题,同时也减少了仿真实体数量,降低了消息传输量。在某战役级作战模拟训练系统中,装甲兵、炮兵等主战兵种的仿真粒度为连,后勤、侦察等保障兵种的仿真力度为单车,基于本文的方法,可以在一台通用工作站上实现红蓝双方两个师的大规模仿真,未产生交互不一致的问题,验证了本文所提方法的可行性和有效性。
参考文献:
[1]赵小松, 李国辉. 一种基于并行存储的多分辨率建模方法[J]. 计算机科学,2012,39(5):151-155.
[2]David P.K. Bigelow J. Experiments on Multi-Resolution Modeling (MRM)[R]. RAND Corporation, 1998.
[3]郭齐胜, 杨立功, 杨瑞平,等. 计算机生成兵力导论[M]. 北京: 国防工业出版社, 2006. 180-188.
[4]谈亮, 蒋丹丹, 许大琴,等. 基于HLA的仿真系统多重表示模型集成[J]. 系统仿真学报, 2009, 21(2): 317-319.
[5]彭彰, 魏丽, 杨慧杰. 一种基于FLAMES框架的工程保障模型体系设计[J]. 系统仿真技术, 2015, 11(3): 242-249.
[6]杨慧杰. 基于战斗队形的坦克连多分辨率建模方法研究[J]. 中国电子科学研究院学报, 2013, 8(2): 134-137.

杨慧杰(1984—),男,山西太原人,工程师,主要研究方向为信息系统建模与仿真、仿真支撑技术;
E-mail: yhj84@qq.com
谷雨(1984—),男,河北高邑人,工程师,主要研究方向为综合电子信息系统建模与仿真。
Research on Interactional Consistency Control Based on Multi-Resolution Entity
YANG Hui-jie, GU Yu
(China Academy of Electronics and Information Technology Beijing 100041)
Abstract:Multi-Resolution Modeling is an important method in simulation of complex system. A key problem is the consistency control in interaction between different resolution entities. This paper proposed an interactional consistency control method based on multi-resolution entity form found of multi-resolution entity, attributes mapping and inactive control three aspects to resolve that problem. Application shows this method is feasible and effective.
Key words:multi-resolution modeling; multi-resolution entity; consistency control;
作者简介
中图分类号:TP39
文献标识码:A
文章编号:1673-5692(2016)01-094-04
收稿日期:2016-01-05
修订日期:2016-01-30
doi:10.3969/j.issn.1673-5692.2016.01.018