车辆传动系道路负载模拟系统
2016-04-21李文礼石晓辉邹喜红重庆理工大学汽车零部件先进制造技术教育部重点实验室重庆400054重庆市科学技术研究院重庆轨道交通及汽车摩托车零部件研究中心重庆400054西南交通大学机械工程学院成都6003
李文礼, 石晓辉, 邹喜红, 郭 栋, 余 勇, 易 鹏(.重庆理工大学 汽车零部件先进制造技术教育部重点实验室,重庆 400054; .重庆市科学技术研究院 重庆轨道交通及汽车(摩托车)零部件研究中心,重庆 400054;3.西南交通大学 机械工程学院,成都 6003)
车辆传动系道路负载模拟系统
李文礼1,3, 石晓辉1, 邹喜红1, 郭栋1, 余勇2, 易鹏2(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室,重庆400054; 2.重庆市科学技术研究院 重庆轨道交通及汽车(摩托车)零部件研究中心,重庆400054;3.西南交通大学 机械工程学院,成都610031)
摘要:为了考核汽车传动系疲劳耐久性,利用汽车传动系道路模拟试验系统在室内重现车辆在真实道路上的行驶扭矩载荷谱。对载荷谱数据进行频谱分析,确定负载模拟系统载荷谱频带宽度。为了提高负载模拟控制系统对目标载荷曲线的跟随精度,设计了一种滑模变结构技术和迭代学习控制技术相结合的控制器,迭代学习控制通过重复执行同一任务来减少跟随误差,使系统输出尽可能逼近理想值,结合滑模变结构控制响应快,对参数变化及扰动不敏感的优点提高了模拟系统的鲁棒性。滑模迭代学习控制方法在学习10次后其控制精度(4.7%)比使用常规PID控制(8.3%)提高了3.6%,迭代后载荷响应误差可控制在5%以内,能够满足室内耐久性试验的要求。
关键词:负载模拟;传动系;滑模变结构控制;迭代学习控制
汽车传动系可靠性试验是考核和验证传动系耐久性的一种重要手段。汽车传动系处于复杂的随机变载荷工作状态,由于零部件的疲劳积累在实际上是非线性的、大小载荷的加载顺序对疲劳寿命是有影响的,因此在对汽车传动系进行试验时,用等幅循环载荷或静载荷进行加载试验是难以得到与路试相同的结果的。而实车动态随机载荷在室内台架上的复现需要较高的加载精度以使试验数据结果可靠,模拟精度不高,容易出现过试验和欠试验[1]。
近年来,室内道路模拟试验已被广泛应用于评价整车及零部件的疲劳耐久性能。为了提高随机波形再现的精度,国内外学者先后提出了远程参数控制方法、时域控制方法等,如MTS公司的远程参数控制(RPC)软件、Schenk公司推出的传递函数迭代补偿(ITFC)控制软件和LMS公司的TWR软件[2]。汪斌等[3]设计了基于平滑滤波器的迭代学习律,减小了不确定因素带来的误差。陈剑等[4]提出了一种基于模糊聚类算法的道路模拟试验控制方法; 刘成等[5]提出用多输入多输出CARMA模型描述多输入多输出试验系统在电液伺服道路模拟试验台上实现多点随机波形再现;于少娟等[6]利用模糊迭代控制使系统获得了良好的加载性能,提高了系统的精度。
本文使用用户实测传动系载荷谱数据,应用雨流计数方法对原始载荷进行压缩处理后,把实车随机载荷在室内台架上重现。为了达到较高的复现精度,采用迭代滑模方法控制台架加载系统,提高了控制系统的鲁棒性。
1数据处理
根据结构疲劳理论,汽车传动系部件的疲劳损伤主要是由循环载荷引起的,若汽车的输入载荷相同,那么它所引起的疲劳损伤理论上也应相同,汽车各部位所承受的载荷基本上与汽车的输入载荷信号成比例。基于这一原理,如果己知用户实际使用环境中汽车的载荷输入,就可以在室内台架上通过驱动电机或测功机对传动系部件施以一定的转速和扭矩重现这一载荷输入。由于载荷重现通常可在较短的时间内完成,因此可以达到试验加速的目的。
由于本文讨论的载荷谱编制方法是针对汽车传动系,其工况测试不仅与扭矩载荷有关,转速和档位信息对其疲劳损伤也有重要影响,因此在对载荷进行峰谷值检测和无效幅值去除处理过程中,在提取扭矩信息的同时把其时间位置信息记录下来,并用此时间位置信息去提取对应的转速和档位信息数据的预处理包括以下步骤① 伪读数的去除;② 平稳性检验;③ 峰谷值检测;④ 无效幅值的省略。
2台架负载模拟系统
2.1负载模拟系统动态特性需求分析
准确跟踪载荷谱是负载模拟系统的最终目标,负载系统的设计是与汽车传动系及其载荷谱密切相关的。通过对载荷谱中扭矩曲线的频谱分析可以获得加载的参考信息,确定加载电机跟踪目标载荷谱的频带宽度。图2是由图1传动轴扭矩曲线得到的频谱图,图中清楚地显示了载荷谱中扭矩载荷在各频率成分下的幅值,从中可以确定加载系统所要跟踪的扭矩载荷的频率上限,只要能够保证在这一频段内的系统动态跟踪性能,就可以达到负载模拟的目的。因为负载模拟系统包括了负载部分,其频宽受到负载机械谐振频率的限制,应该尽可能地提高负载模拟系统除负载本身以外的机械结构的频率特性,如联轴器的刚度等。同时,为了防止负载模拟系统在阶跃响应时的超调过大而对被试样机造成损害,应该对负载模拟系统的扭矩和运动扰动的阶跃响应超调量加以限制。

图1 实测传动系道路载荷谱曲线Fig.1 Road load spectrum Curve of Drivetrain

图2 载荷谱的传动轴扭矩频谱图Fig.2 The Torque load spectrum of drive shaft
2.2台架系统数学模型
针对道路载荷动态模拟要求建立的台架系统总体结构如图3所示,主要包括驱动电机、离合器、后驱变速器和联轴器、轴承座和永磁同步加载电机。总体控制方法是上位机把需要复现的扭矩载荷谱下载到实时控制器,由实时控制器控制变频器来驱动永磁同步电机精确跟踪目标载荷谱,同时发送指令给离合器踏板控制器和换挡机械手控制器来完成车辆实际运行道路载荷的模拟。
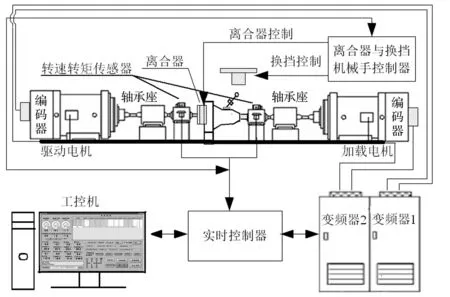
图3 台架系统总体结构图Fig.3 Setup of Vehicle Drivetrain Test Bench
根据图3中系统结构,驱动电机带动离合器、变速器和加载测功机运动,忽略编码器惯量等因素的影响,台架系统由牛顿定律得:
(1)
式中:Te为驱动电机输出扭矩;TL为加载测功机扭矩;Jf为飞轮及离合器转动惯量;Je为驱动电机转动惯量;Jt为各挡位下变速器转动惯量(文中均以三挡为例);Jc为联轴器、半轴和传感器转动惯量;Jd为加载测功机转动惯量;B为台架阻尼系数。进行拉氏变换得台架系统传递函数:
(2)
2.3负载模拟系统控制模型
其三,教育行政部门需要认识到教师情绪劳动作为劳动类型之一,不能被“忽视”,也不能被“敌视”,需要被合理考虑。因此,教育行政部门从意识上要重视教师情绪劳动的存在与管理,从策略上要全员关注、全程管理、科学优化,努力将对教师情绪劳动的模糊认知、判断、处理走向更加科学、合
(3)
PMSM转矩方程为:
(4)
PMSM运动方程为:
(5)
式中:ud,uq,id,iq,Ld,Lq分别为定子电压、电流和电感在d,q轴上的分量。R为定子电阻;J为转动惯量;Te、TL分别为电磁转矩和负载转矩;ψa为永磁体与定子交链磁链;ωe=npω;ωe为电机电角速度,ω为电机机械角速度;np为极对数;B为黏滞摩擦因数。

图4 负载模拟系统控制框图Fig.4 Load Simulation System control diagram
3滑模迭代学习控制
滑模迭代学习控制系统结构如图5所示,采样滑模函数和滑模函数变化率作为滑模控制学习的输入项,产生控制信号校正量,使系统快速收敛。

图5 滑模迭代控制框图Fig.5 The SM-ILC Control Diagram
定义永磁同步加载电机电磁转矩跟踪误差如下:
(6)

取加载系统的状态变量为:
(7)
(8)
(9)
设计转矩滑模面:
s=cx1+x2
(10)
式中:c为正增益。对s求导得:
(11)
高为炳[11]提出的指数趋律方法不仅能较好地减弱滑模抖振,而且控制量u的求取也比较简单直观,其形式如下:

(12)
由式得控制量iq的表达式为:

(13)
建立Lyapunov函数:
(14)
同时由Lyapunov稳定性理论可知,要使滑模变结构控制的系统稳定需要满足如下条件:
(15)


iq(k+1)=iq(k)+λe(k)
(16)
式中,iq(k)为第k个迭代周期的控制量,iq(k+1)为第k个迭代周期的输出量,并且作为下一个周期被控对象的输入存放在记忆存储器中。λ为控制器增益,系统误差e(k)可表达为:
(17)
从式(13)中电机扭矩与电流的关系可得:
Te=h(t)iq(t)
(18)

(19)
(20)
4试验结果分析
道路负载模拟台架如图3,考虑到前驱变速器两个半轴需提供两个负载电机,这样在扭矩控制过程中会出现差速等不稳定现象。本文通过传动比参数把实测半轴载荷谱转化到变速器输入端,利用输入端的驱动电机控制扭矩,变速器输出端电机为转速模式。被试变速器输入端由功率132 kW高带宽低惯量永磁同步电机加载,输出端连接交流异步电机提供驱动转速,同时在被试变速器输入输出端分别连接转速扭矩传感器用来采集反馈信号,两个电机的转速闭环回馈信号由安装在电机上的编码器获得。负载模拟电机内环为电流,外环为迭代滑模控制。系统上位机与实时控制器的通讯采用工业以太网标准的Modbus TCP协议,100M以太网的传输能力为每秒4 000个Modbus TCP报文。在试验台架控制系统中上位机PC选择ModBusTCP Master模式,实时控制器选择ModBusTCP Slave模式。实时控制器与变频器、离合器踏板控制器和换挡机械手控制器的通讯采用CANopen协议,它是一个标准的工业控制系统现场总线协议,最高通讯波特率可达1 Mbps。
图6是模拟系统迭代3次后的跟踪曲线和参考曲线,由于学习参考数据不足,系统的跟踪精度不高,但是从图7~图9中可以看出负载模拟系统在学习10次后的最大跟踪误差为4.7%,而在常规PID控制下的最大跟踪误差为8.3%,滑模迭代学习控制方法明显优于常规PID控制。图10与图11为滑模迭代10次后其频域幅值与参考曲线频域幅值对比,可以看出低频部分幅值相差很小,频率较大部分的幅值误差较大,这是由于系统惯量和控制器响应相对较慢的原因。当模拟系统迭代学习20次后其最大跟踪误差降到3.8%左右,这种跟踪精度达到了道路载荷模拟的要求。
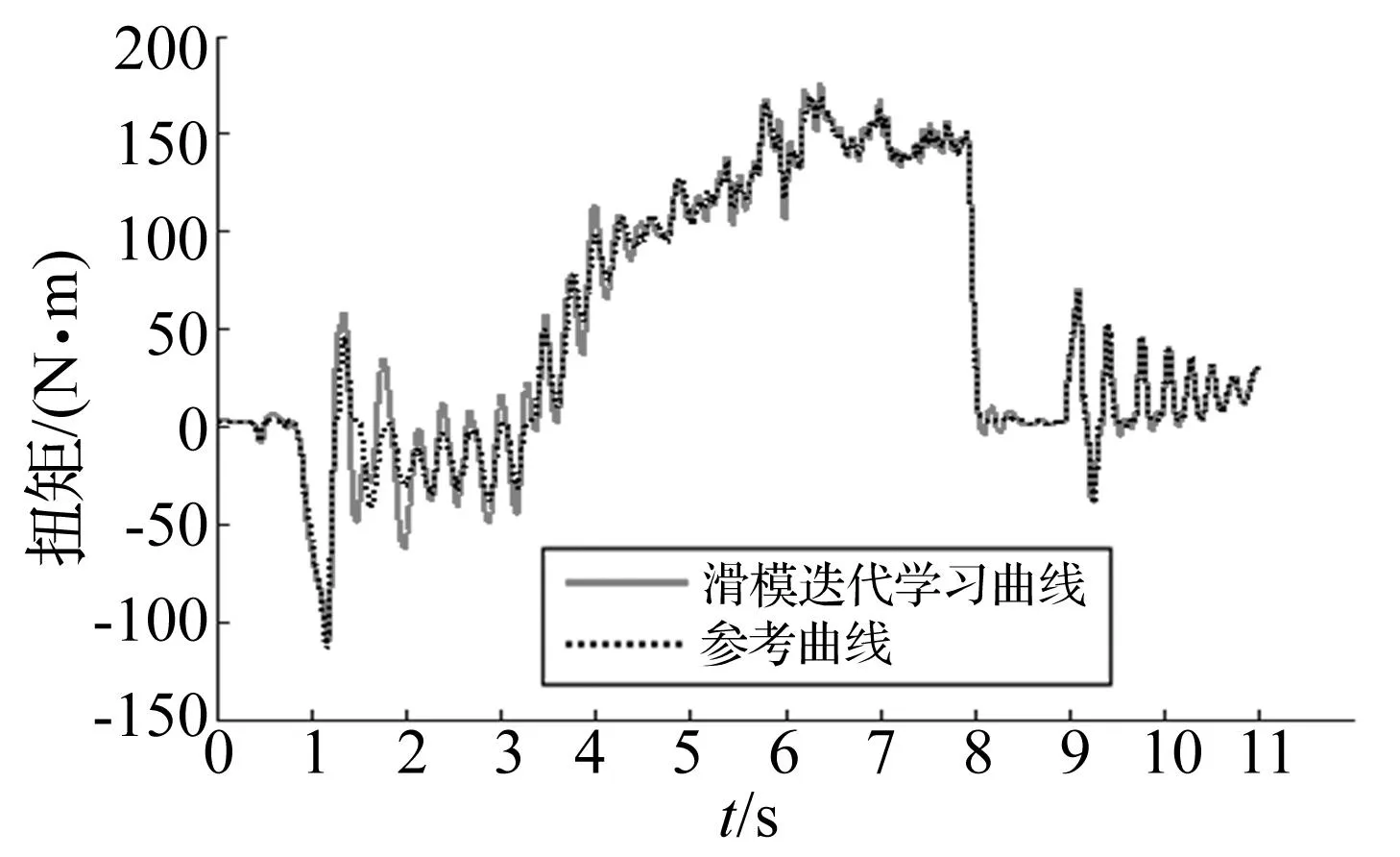
图6 迭代滑模控制3次迭代后Fig.6 The Curves of the SM-ILC Control (3 iterations)
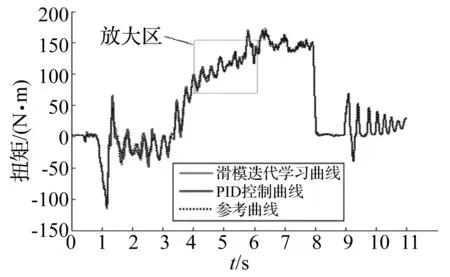
图7 迭代滑模控制迭代10次后与常规PID控制比较Fig.7 The Curves of the SM-ILC Control and PID Control (10 iterations)
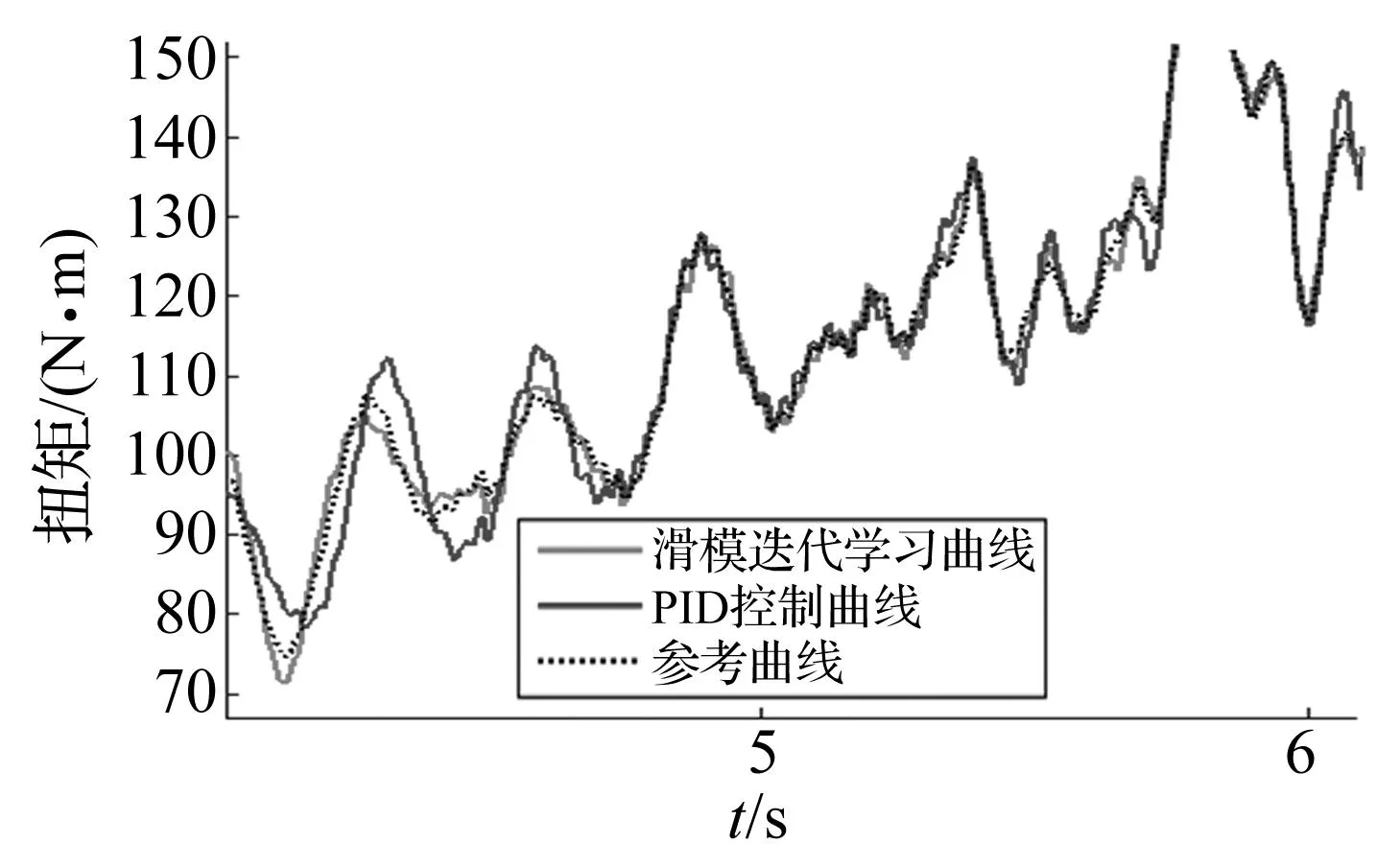
图8 迭代滑模控制迭代10次后与常规PID控制比较(放大)Fig.8 The Curves of the SM-ILC Control and PID Control (10 iterations)
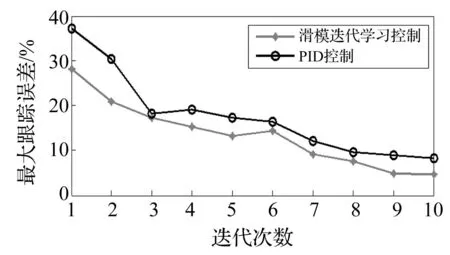
图9 迭代滑模控制迭代10次最大误差曲线Fig.9 The maximum error curves of the SM-ILC Control (10 iterations)
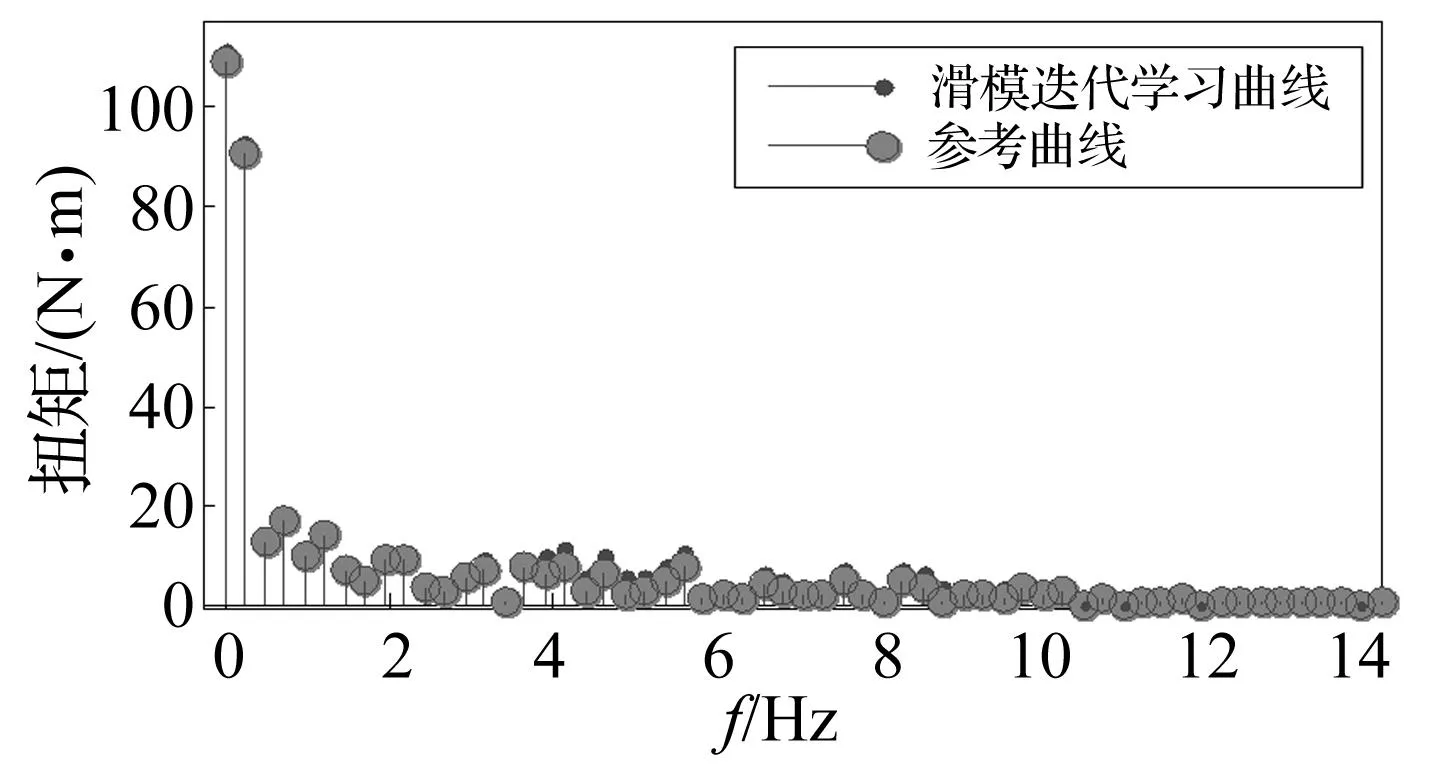
图10 迭代滑模控制迭代10次后频域幅值Fig.10 The frequency domain Amplitude of the SM-ILC Control(10 iterations)

图11 迭代滑模控制迭代10次后频域幅值(放大)Fig.11 The frequency domain Amplitude of the SM-ILC Control(10 iterations)
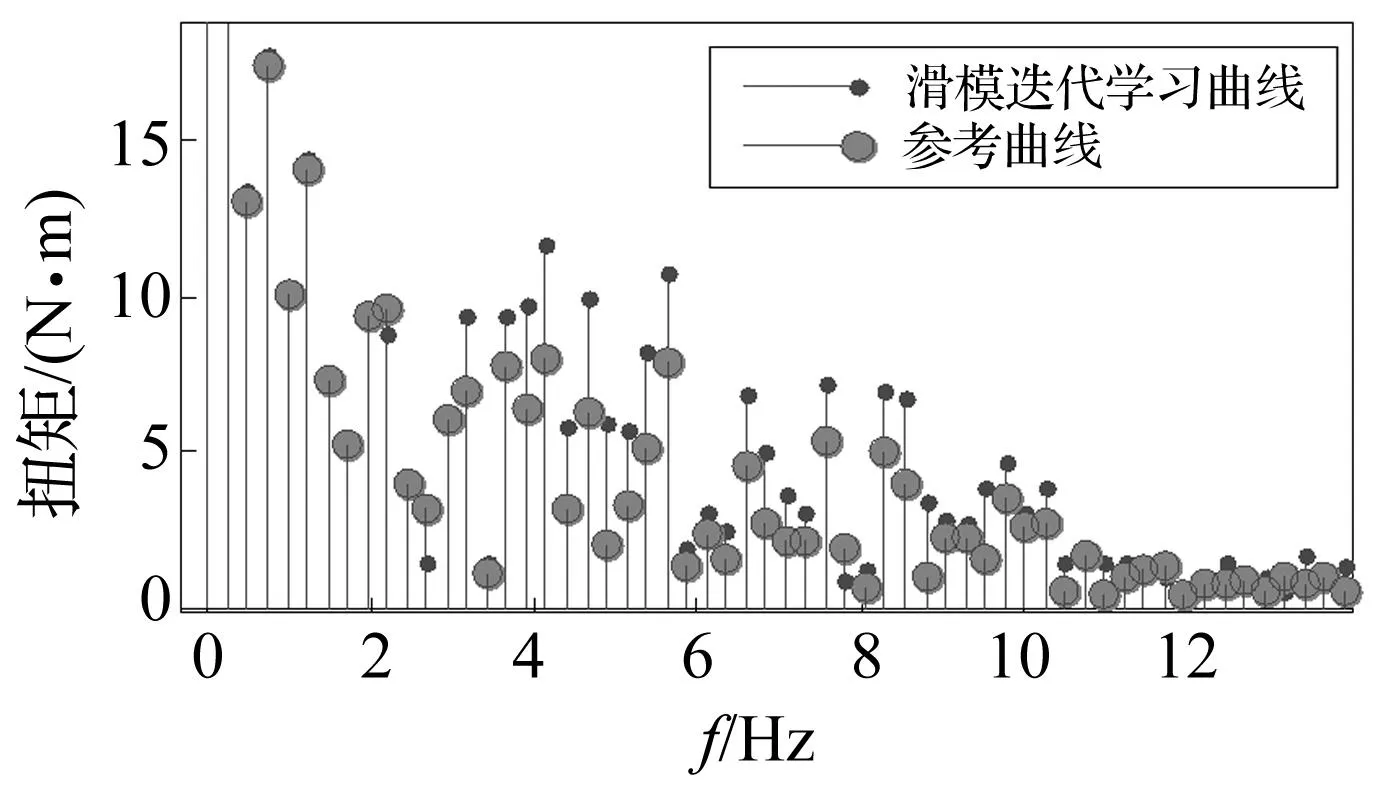
图12 迭代滑模控制迭代20次后Fig.12 The Curves of the SM-ILC Control (20 iterations)

图13 迭代滑模控制迭代20次最大误差曲线Fig.13 The maximum error Curves of the SM-ILC Control (20 iterations)
5结论
利用汽车传动系道路模拟试验系统在室内重现车辆在真实道路上的行驶载荷谱,为了提高负载模拟控制系统对目标载荷曲线的跟随精度,本文提出来一种滑模变结构技术和迭代学习控制技术相结合的控制方法。
(1) 迭代学习控制通过重复执行同一任务来减少跟随误差,是系统输出尽可能逼近理想值,结合滑模变结构控制响应快,对参数变化及扰动不敏感的优点提高了模拟系统的鲁棒性。
(2) 滑模迭代学习控制下系统学习10次后的最大跟踪误差为4.7%,而在常规PID控制下的最大误差为8.3%,滑模迭代学习控制方法明显优于常规PID控制,当模拟系统迭代学习20次后其最大跟踪误差降到3.8%左右,这种跟踪精度达到了道路载荷模拟的要求。
参 考 文 献
[ 1 ] 邹喜红,熊锋,余勇,等.摩托车车架多轴向多激励道路模拟试验方法研究[J].振动与冲击, 2014,33(5):170-174.
ZOU Xi-hong,XIONG Feng,YU Yong,et al.Multi-axial and multi-channel road simulation method for motorcycle frames[J]. Journal of Vibration and Shock, 2014,33(5):170-174.
[ 2 ] 胡毓冬,周鋐,徐刚.整车道路模拟试验台的控制算法[J].同济大学学报:自然科学版,2012,40(8):1244-1248.
HU Yu-dong,ZHOU Hong,XU Gang.Control algorithm of test rig for vehicle road simulation [J].Journal of TongJi University:Natural Science, 2012,40(8):1244-1248.
[ 3 ] 汪斌,过学迅,李孟良,等.基于迭代学习控制的道路模拟算法[J].汽车工程,2010,32(8):686-689.
WANG Bin,GUO Xue-xun,LI Meng-liang,et al.Road simulation algorithm based on iterative learning control[J]. Automotive Engineering, 2012,40(8):1244-1248.
[ 4 ] 陈剑,马文明,文智明.基于模糊聚类算法的道路模拟试验控制方法研究[J].中国机械工程,2010,21(18):2260-2263.
CHEN Jian,MA Wen-ming,WEN Zhi-ming.Research on road simulation control method based on fuzzy clustering algorithm[J]. China Mechanical Engineering, 2010,21(18):2260-2263.
[ 5 ] 刘成,李一兵,王仲范,等.多输入多输出试验系统的随机波形时域再现[J].汽车工程,2003,25(2):171-174.
LIU Cheng,LI Yi-bing WANG Zhong-fan,et al.The reconstruction of stochastic waveform of MIMO test system in time domain[J]. Automotive Engineering, 2003,25(2):171-174.
[ 6 ] 于少娟,彭昌,宋君君,等.双阀并联电液伺服力控系统的迭代学习控制[J],振动、测试与诊断,2013,33(2):247-251.
YU Shao-juan,PENG Chang,SONG Jun-jun,et al. Iterative learning control on double-valve parallel electro-hydraulic servo force control system[J].Journal of Vibration,Measurement & Diagnosis,2013,33(2):247-251.
[ 7 ] 张宏伟,余发山,卜旭辉,等. 基于鲁棒迭代学习的永磁直线电机控制[J].电机与控制学报,2012(16),81-86.
ZHANG Hong-wei,YU Fa-shan,BU Xu-hui,et.al.Robust iterative learning control for permanent magnet linear motor[J] .Eleetric Machines and Control,2012(16):81-86.
[ 8 ] 何熊熊,秦贞华,张端.基于边界层的不确定机器人自适应迭代学习控制[J].控制理论与应用,2012(29):1090-1093.
HE Xiong-xiong,QIN Zhen-hua,ZHANG Duan.Adaptive iterative learning control for uncertain robotbased on boundary layer[J],Control Theory Applications, 2012(29):1090-1093.
[ 9 ] 刘金琨.滑模变结构控制MATLAB仿真[M].第2版.清华大学出版社,2012.
[10] Singh M, Mohanty K B, Member S,et al.Sliding mode control of a feedback linearized induction motor using TS fuzzy based adaptive iterative learning controller[C]//9th IEEEInternational Conference on Power Electronics & Drive Systems, Singapore, Dec 5-8, 2011:625-630.
[11] 高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990.
A dynamic road load simulation system for vehicle drivetrains
LIWen-li1,3,SHIXiao-hui1,ZOUXi-hong1,GUODong1,YUYong2,YIPeng2(1. Key Laboratory of Advanced Manufacturing and Test Technology for Automobile Parts, Ministry of Education Chongqing University of Technology, Chongqing 400054, China;2. Research Center for Rail Transit & Automobile(Motorcycle)Parts, Chongqing Acaddemy of Science and Technology, Chongqing 400054, China;3.Mechanical Engineering College, Southwest Jiao tong University, Chengdu 610031, China)
Abstract:In order to study the fatigue durability of a vehicle drivetrain system, a new vehicle drivetrain road load simulation system was designed to return the load spectrum on an indoor testbench. The band widths of the load simulation system were obtained according to the measured data. Based on the iterative learning control(ILC), a sliding mode variable structure control(SMC) scheme was proposed for the road load simulation system to improve the accuracy of load spectrum tracking. ILC generally improved the system performance in performing repetitive tasks by using the information from previous iterations, SMC with advantages of fast response and being not sensitive to disturbances of parameters was a good solution to the problem of the system’s robustness. It was shown that compared with the conventional PID control, the control precision of the simulation system with ILC and SMC can be improved by 3.6%, the iteratived load response error can be controlled within 5%, the requirements of the indoor durability test can be met.
Key words:load simulation; drivetrain; sliding mode variable structure control (SMC); iterative learning control (ILC)
中图分类号:U467.523
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.05.026
收稿日期:2014-11-06修改稿收到日期:2015-03-16
基金项目:国家自然科学基金资助项目(51205432);重庆市科技攻关计划资助项目(CSTC2011GGB60010)
第一作者 李文礼 男,博士生,1983年生
