基于阶次分析技术的行星齿轮箱非平稳振动信号分析
2016-04-21王科盛左明健电子科技大学机械电子工程学院设备可靠性与健康管理实验室成都611731
王 况, 王科盛, 左明健(电子科技大学 机械电子工程学院,设备可靠性与健康管理实验室,成都 611731)
基于阶次分析技术的行星齿轮箱非平稳振动信号分析
王况, 王科盛, 左明健(电子科技大学 机械电子工程学院,设备可靠性与健康管理实验室,成都611731)
摘要:行星齿轮箱启动、停止和负载发生变化时,转速会发生变化并使得行星齿轮箱的振动信号具有明显的非平稳特性。行星齿轮箱复杂的结构特征导致了振动信号的复杂性,使得常规的频谱和解调分析方法难以识别时变工况下的行星齿轮箱故障特征频率。在行星齿轮箱故障特征频率的基础上,考虑转速变化特征,总结了行星齿轮箱太阳轮、行星轮及齿圈的故障阶次特征表。通过对行星齿轮箱变转速工况下太阳轮故障实验信号的阶次分析,实现了变转速情况下行星齿轮箱太阳轮故障诊断,并与传统的频域信号分析方法比较,体现了阶次分析技术在行星齿轮箱变工况故障诊断过程中的优势。
关键词:阶次分析;行星齿轮箱;非平稳;故障诊断
行星齿轮传动系统由太阳轮、行星轮、行星架以及齿圈组成。通常齿圈固定不动,太阳轮绕自身的中心轴旋转,行星轮绕自身中心轴自转的同时还绕太阳轮的中心轴公转,并且与太阳轮和齿圈同时啮合。
行星齿轮传动系统具有一系列的优点,如重量轻、体积小、传动比大、承载能力强、传动效率高等。这些优点使得其被广泛应用于工程机械、风力发电、航空、车辆等领域的机械传动系统中。由于经常工作在低速重载的恶劣环境中,齿轮的齿面承受着交变载荷的作用,使得其中的关键部件(太阳轮、行星轮、齿圈、行星架)经常发生磨损、裂纹和疲劳断裂等故障[1]。行星齿轮传动系统在变工况和稳定工况下的常见故障是基本一致的,然而,由于外部驱动或载荷的变化,故障信息尤其是早期故障信息更容易在变工况下凸显出来。但是,故障特征频率由于转速的变化会出现明显的频率模糊,故障特征在传统的时域和频域中很难辨识。
行星齿轮传动系统是典型的复合运动,其振动响应比定轴齿轮箱更为复杂,相应的故障诊断问题具有独特的特点和难点[1]。由于其自身结构的复杂性、故障传递路径的时变特性导致了其频率响应成分复杂、故障振动响应微弱;由于其工作环境可能存在载荷大范围瞬时波动导致其振动信号具有强烈的非平稳性。因此,有必要对非平稳运行状态下的行星齿轮箱故障诊断方法进行深入的研究。
目前,对于行星齿轮箱故障诊断的研究大多集中在太阳轮、齿圈、行星架等部件上,对于即公转又自转的行星轮的故障诊断问题研究很少;并且对行星齿轮箱故障诊断的研究大多借助于对定轴齿轮箱的研究方法[1]。如:Samuel等[2-3]利用谐波小波获得均方小波映射,对行星齿轮箱缺齿、剥落、裂纹3种故障进行了区分,并且利用正规化能量特征对行星齿轮箱进行故障诊断;Yu等[4]提出基于小波变换和时域平均的行星齿轮箱故障诊断方法;冯占辉等[5]提出基于希尔伯特-黄谱的啮合频率邻域内能量特征来诊断行星齿轮箱太阳轮断齿故障。
对于行星齿轮箱的故障诊断大多集中在平稳状态下的研究,而行星齿轮箱在变速过程中更能凸显出故障特征[6]。目前,风力发电机等具有行星齿轮箱装置的设备通常是在变转速过程中工作的,但是国内外对变速过程中的故障诊断方法研究还很少,并且都是在时域和频域中处理信号[7-8],而利用阶次分析来对行星齿轮箱进行故障诊断的研究报道极少。
行星齿轮箱的转速和负载等工况的变化将导致振动信号具有明显的非平稳特性。在这种情况下,各个齿轮的特征频率及其幅值也将具有时变特性。一般的傅里叶变换、包络谱分析等只适用于转速稳定的情况下进行故障诊断[9-13]。对于时变工况下的行星齿轮系统故障诊断则需要其它的方法。
由文献[9-13]可知,行星齿轮箱故障诊断的关键是识别出行星齿轮箱的各齿轮故障频率及其幅值变化。在变转速的时变工况下,行星齿轮箱的各个频率成分和转速直接相关;另外,负载变化引起转速也会随之变化,导致行星齿轮箱的特征频率成分发生变化。因此,抓住转速变化的特征识别行星齿轮箱故障隐患是实现时变工况下行星齿轮箱故障诊断的关键。
阶次分析是一种分析旋转或往复机械振动信号的有效手段,适用于分析转速随时间变化的振动信号[14]。通常来说,在频谱图上进行故障诊断关键是识别出特征频率,相对应的,在阶次谱上进行故障诊断就要识别出特征阶次。阶次分析的主要步骤是将时域的振动信号进行重采样得到角域信号。角域信号具有独立于转速变化的周期特性,将角域信号进行傅里叶变换得到阶次谱。信号的特征频率随着转速的变化而变化,但其对应的特征阶次不随转速的变化而变化,从而利用阶次分析有效地实施故障诊断。
因此,本文将针对时变工况下行星齿轮箱故障,利用阶次分析技术进行故障诊断研究。考虑转速变化的影响,在行星齿轮系统太阳轮、行星轮故障特征频率的基础上,分析和总结行星齿轮箱故障特征阶次。并通过实验数据,分析变转速情况下故障特征,对行星齿轮箱太阳轮故障进行故障诊断。
1行星齿轮箱阶次谱原理
1.1阶次分析基本原理
计算阶次分析法是由Potter[15]在1989年首先提出。其主要思想是通过信号处理算法, 将时域上等时间间隔采样信号转化为角域等角度采样信号, 即实现角域重采样[16-17]。
在阶次分析过程中,需要一个参考轴来进行等角度重采样,在用阶次分析技术对行星齿轮箱进行故障诊断时不仅可以以太阳轮轴作为参考轴,而且可以以行星架轴作为参考轴来进行分析,从不同的角度解析故障信息。本文将以太阳轮轴作为参考轴进行后续分析。计算阶次分析的主要步骤见图1。

图1 计算阶次分析步骤Fig.1 Procedure of computed order analysis
1.2行星齿轮箱太阳轮阶次谱
行星齿轮箱在正常工作过程中,由于启动、停止或者负载变化等影响,转速会随着时间发生变化,直接导致行星齿轮箱的振动信号的非平稳性。行星齿轮箱的结构和一般定轴齿轮箱有着显著差异,其振动响应信号也更为复杂,增加了行星齿轮箱故障诊断的难度。因此,对行星齿轮箱非平稳振动信号模型进行分析有助于对其进行故障诊断。
由文献[9-10]可知,行星齿轮箱拥有多种独特的故障特征频率。在转速变化的情况下,特征频率将随着转频的变化而变化,然而,各个特征频率对应的特征阶次是恒定不变的,找出故障的特征阶次就可以对行星齿轮箱进行故障诊断。
阶次分析的重要过程是将非稳态的时域信号转化成稳态的角域信号(如图1所示),因此,行星齿轮箱特征阶次谱应该与稳态的特征频率谱一致。以太阳轮局部故障为例,由文献[9-10]可知,行星齿轮箱的啮合频率为
(1)

太阳轮局部故障特征频率为
(2)
式中:N为行星轮个数。
假设行星齿轮箱输入轴即太阳轮轴的转速为n(t),则太阳轮的绝对旋转频率为
(3)
由式(1)和式(3)可以算出行星架的旋转频率为
(4)
行星齿轮箱的啮合频率为
(5)
太阳轮的故障频率为
(6)
通过上述计算以及阶次的定义,可以得到行星齿轮箱太阳轮局部故障时各个频率成分及其对应阶次,如表1所示。
和太阳轮局部故障特征频率和特征阶次类似,可以计算出行星轮局部故障以及齿圈局部故障的特征频率和特征阶次,如表2和表3所示。
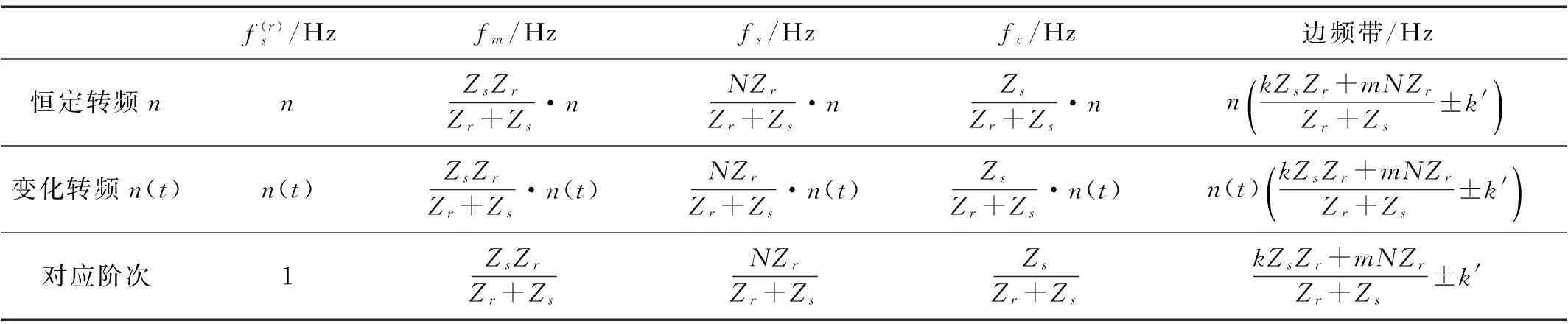
表1 太阳轮局部故障频率及对应阶次

表2 行星轮局部故障频率及对应阶次

表3 齿圈局部故障频率及对应阶次
表1~表3中,k、k′为正整数,m为在(-∞,+∞)上的整数,fp、fr分别为行星轮故障频率、齿圈故障频率,Zp为齿圈齿数。
从表1~表3可以看出,在转速恒定的情况下,行星齿轮箱中的各个频率成分是恒定的;在转速变化的情况下,行星齿轮箱的各个频率成分随着转速的变化而变化,然而,对应的特征阶次却是恒定的,可以用阶次分析进行故障诊断。
2实验信号分析
2.1实验说明
本实验数据采集于电子科技大学设备可靠性与健康管理实验室动力传动故障诊断综合实验台(DDS)(美国Spectra Quest(SQ)公司产品),实验平台见图2,行星齿轮箱参数见表4。表5为以太阳轮轴为参考轴时各个频率对应的阶次。为了模拟行星齿轮箱太阳轮局部故障,在太阳轮其中一个轮齿上加工了一个断齿,如图3所示。实验过程中,为了从横向和纵向对行星齿轮箱进行故障诊断,另外考虑采集到的振动信号的强弱以及传感器安装的难易,在行星齿轮箱的顶部和侧面安装了加速度传感器,采集行星齿轮箱横向和纵向的振动信号,见图2中4、5处;在驱动电机和负载处安装了脉冲传感器,采集输入轴转速脉冲和输出轴转速脉冲信号,见图2中2、8处。实验过程中,电机在20 s内转动频率由0 Hz加速到50 Hz,考虑到最大观测频率以及设备实际情况,将采样频率设为7 680 Hz,采集无故障齿时行星齿轮箱的信号和太阳轮有一个断齿时的信号。
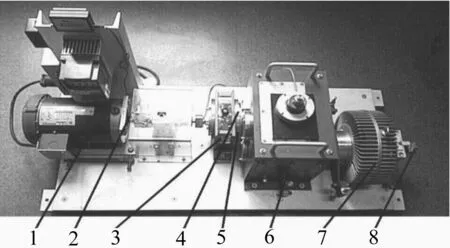
1.电机;2.脉冲传感器;3.行星齿轮箱;4,5.加速度传感器;6.直齿齿轮箱;7.负载施加装置;8.编码器图2 DDS实验台Fig.2 Experimental equipment of DDS

齿轮齿数太阳轮28行星轮36齿圈100

表5 行星齿轮箱对应阶次

图3 断齿太阳轮Fig.3 Sun gear chipped teeth
2.2行星齿轮箱振动信号分析
2.2.1无故障时加速信号分析
① 傅里叶变换分析
图4,5和6分别为正常行星齿轮箱加速过程采集的信号(振动信号和转速脉冲信号),频谱图以及转速图。由图6可见,振动信号转速在1 000 r/min~2 600 r/min之间,对应的行星齿轮箱的输入转频为16.6 Hz~43.3 Hz,根据表1和表4,可以计算出啮合频率在364.6 Hz~947.9 Hz之间。由图5(a)可见,在0 Hz~1 000 Hz之间,频率谱上广泛分布,无法分辨行星齿轮箱的特征频率;尤其是通过图5(b)可以看出,转速频率分布在16 Hz~50 Hz,很难作为故障诊断的依据。在行星齿轮箱故障诊断中,关键的是识别出各个特征频率,傅里叶变换频谱图上不能识别出特征频率,因此很难用来进行加速过程的行星齿轮箱故障诊断。
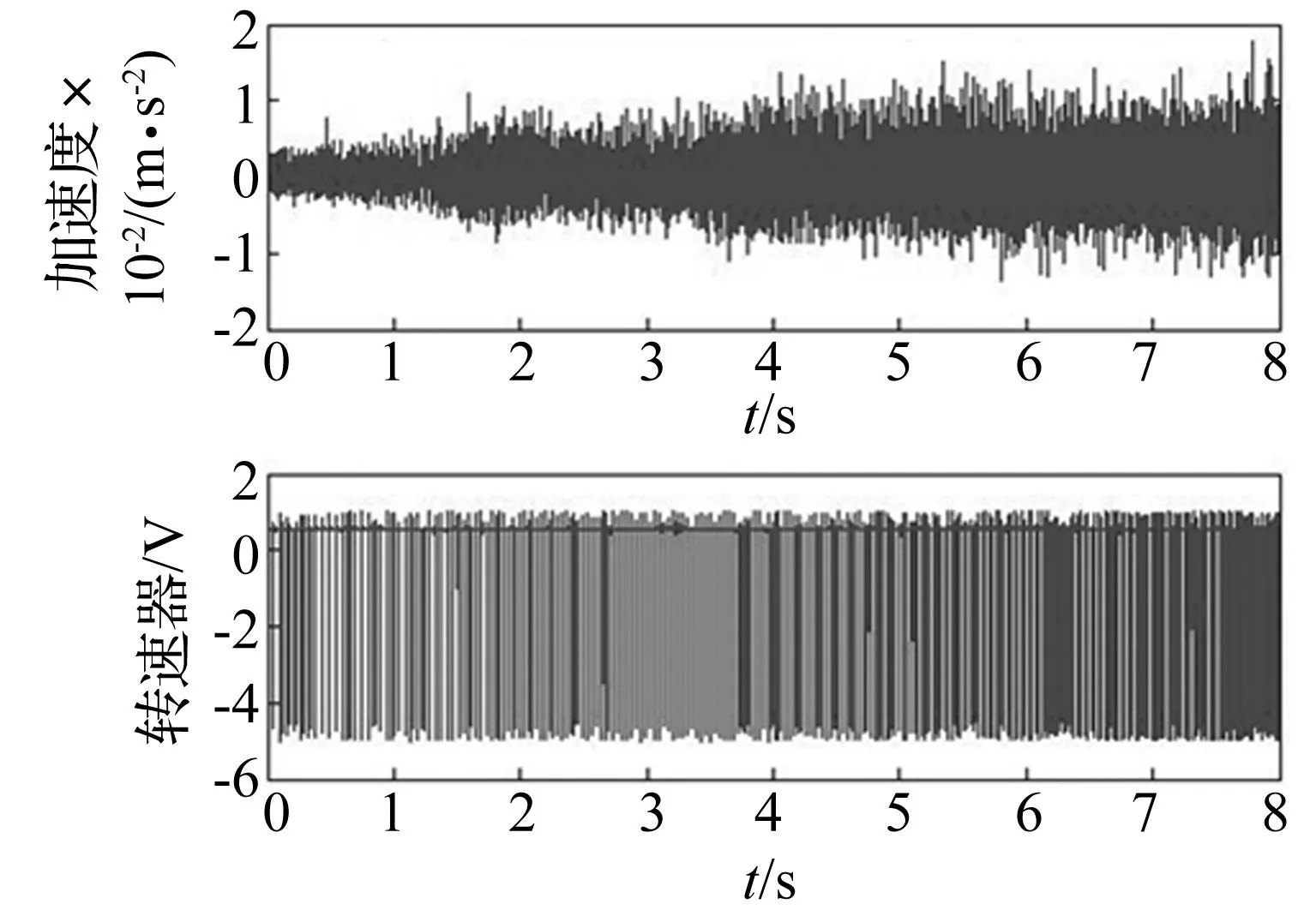
图4 无故障齿加速信号Fig.4 Acceleration signal of the normal gear

图5 无故障齿加速频谱Fig.5 Acceleration spectrum of the normal gear

图6 无故障齿速度Fig.6 Speed of the normal gear
② 阶次分析

图7 无故障齿加速角域信号Fig.7 Angle domain signal of the normal gear

图8 无故障齿加速阶次谱Fig.8 Order spectrum of the normal gear
图7和图8分别为等角度重采样的角域图和阶次谱。根据表1和4,可以计算出行星齿轮箱太阳轮局部故障各个频率对应的阶次,如表5所示。从图8(a)可以看出,信号的主要阶次为太阳轮旋转阶次1及其倍数n(n为正整数),由图8(b)可见,信号的阶次还包括行星齿轮箱啮合阶次Om,啮合阶次和行星架旋转阶次之和Om+Oc的成分。这些阶次成分符合表1中理论上基于正常信号的信号模型的预期结果。比较图5和图8可以发现在频谱图中很难发现的特征频率在阶次谱中可以很清楚的识别出对应各个特征阶次成分,因此阶次分析对变转速过程行星齿轮箱故障诊断具有明显的优势。
2.2.2太阳轮断齿加速信号分析
① 傅里叶变换分析
图9、10和11分别为太阳轮断齿行星齿轮箱加速过程中采集的信号(振动信号和转速脉冲信号)、频谱图和转速图。由图11可见,用于分析的振动信号转速1 100 r/min~2 700 r/min之间,即行星齿轮箱的输入转频在18.3 Hz~45 Hz之间,由表1和表4可以计算出行星齿轮箱的啮合频率在401.04 Hz~984.37 Hz之间,太阳轮的故障频率在57.29 Hz~140.63 Hz之间,行星架的转动频率在4.01 Hz~9.84 Hz之间。由图10可见,频率谱中虽然有峰值存在,但是各个特征频率随着转速的变化而变化,不能确认各个峰值对应的特征频率,与正常加速信号的图4、5、6相比,很难确定故障及其原因。
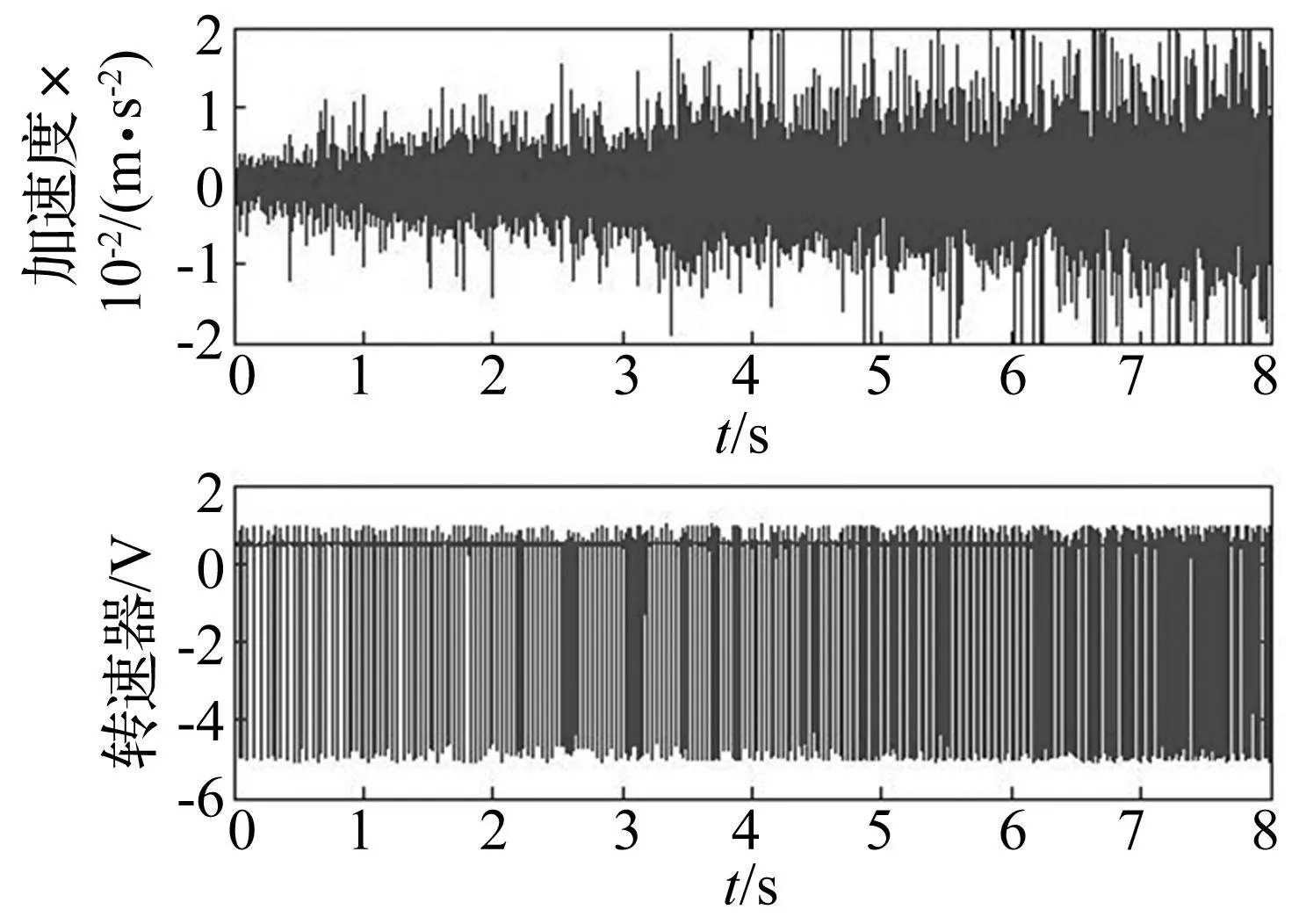
图9 断齿加速信号Fig.9 Acceleration signal of the gear with a chipped tooth
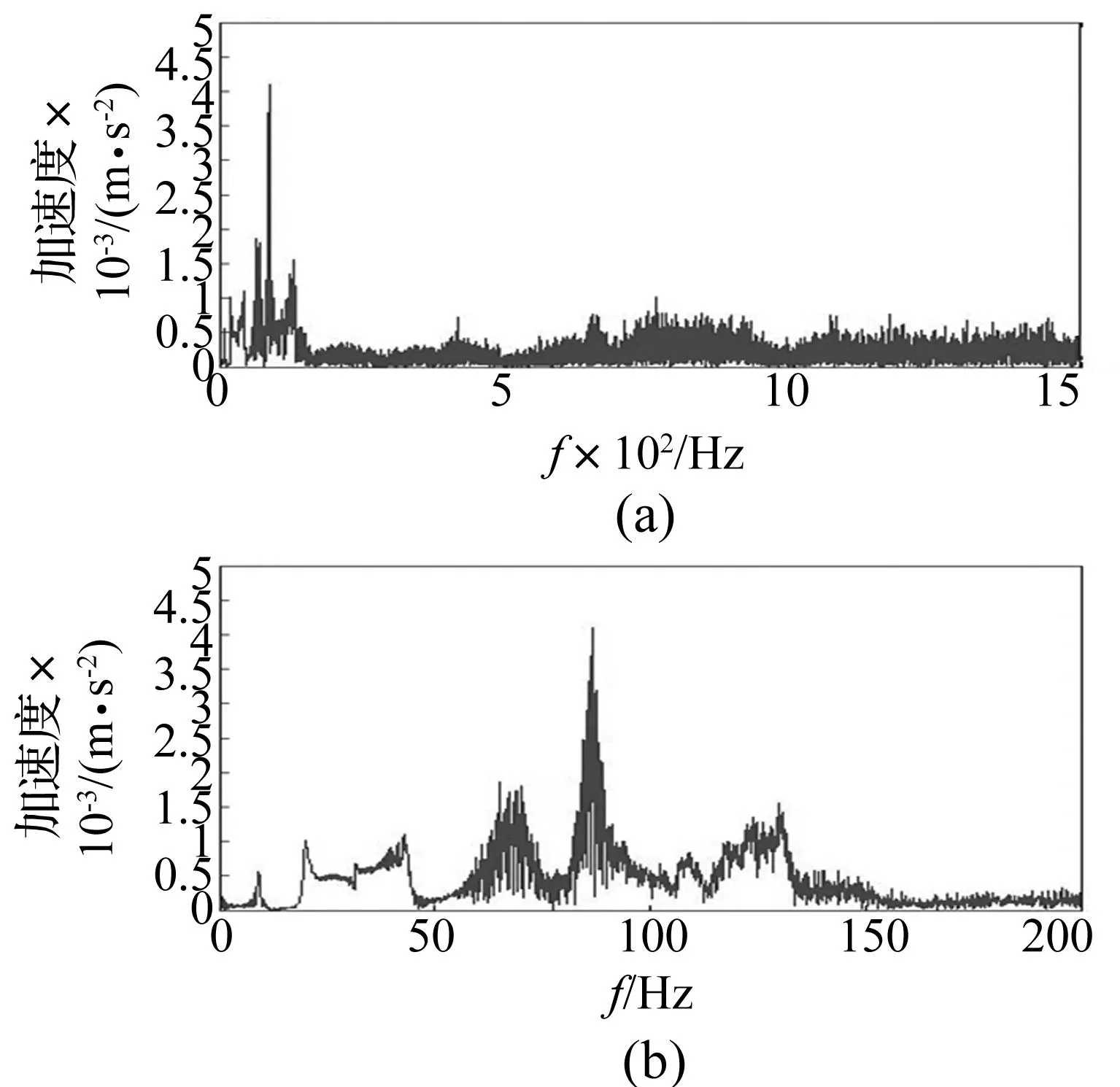
图10 断齿加速频谱Fig.10 Acceleration spectrum of the gear with a chipped tooth

图11 断齿速度Fig.11 Speed of the gear with a chipped tooth
② 阶次分析
图12和图13分别为等角度重采样角域图和阶次谱图。由图12可见,在重采样后的角域信号已经出现了明显周期特性,和信号时域图7相比,在角域图中已经可以判断出行星齿轮箱出现了故障,并且该故障在角域内是周期性出现的。在图13(a)中可以清晰地看到阶次谱中的主要阶次成分为太阳轮旋转阶次1及其倍数n(n为正整数),由图13(b)可见,信号中的阶次成分还包括啮合阶次Om,啮合阶次与太阳轮旋转阶次之和Om+Oc以及边带Om±Oc和Om+Os±Oc,啮合阶次与太阳轮故障阶次之差Om-Os等成分,这些阶次成分都表明了太阳轮出现了故障。对比图10和图13可见,阶次分析很清楚的识别出了特征阶次,而傅里叶频谱分析不能识别出特征频率,说明阶次分析对变转速情况下行星齿轮箱故障诊断十分有效。

图12 断齿加速角域信号Fig.12 Angle domain signal of the gear with a chipped tooth
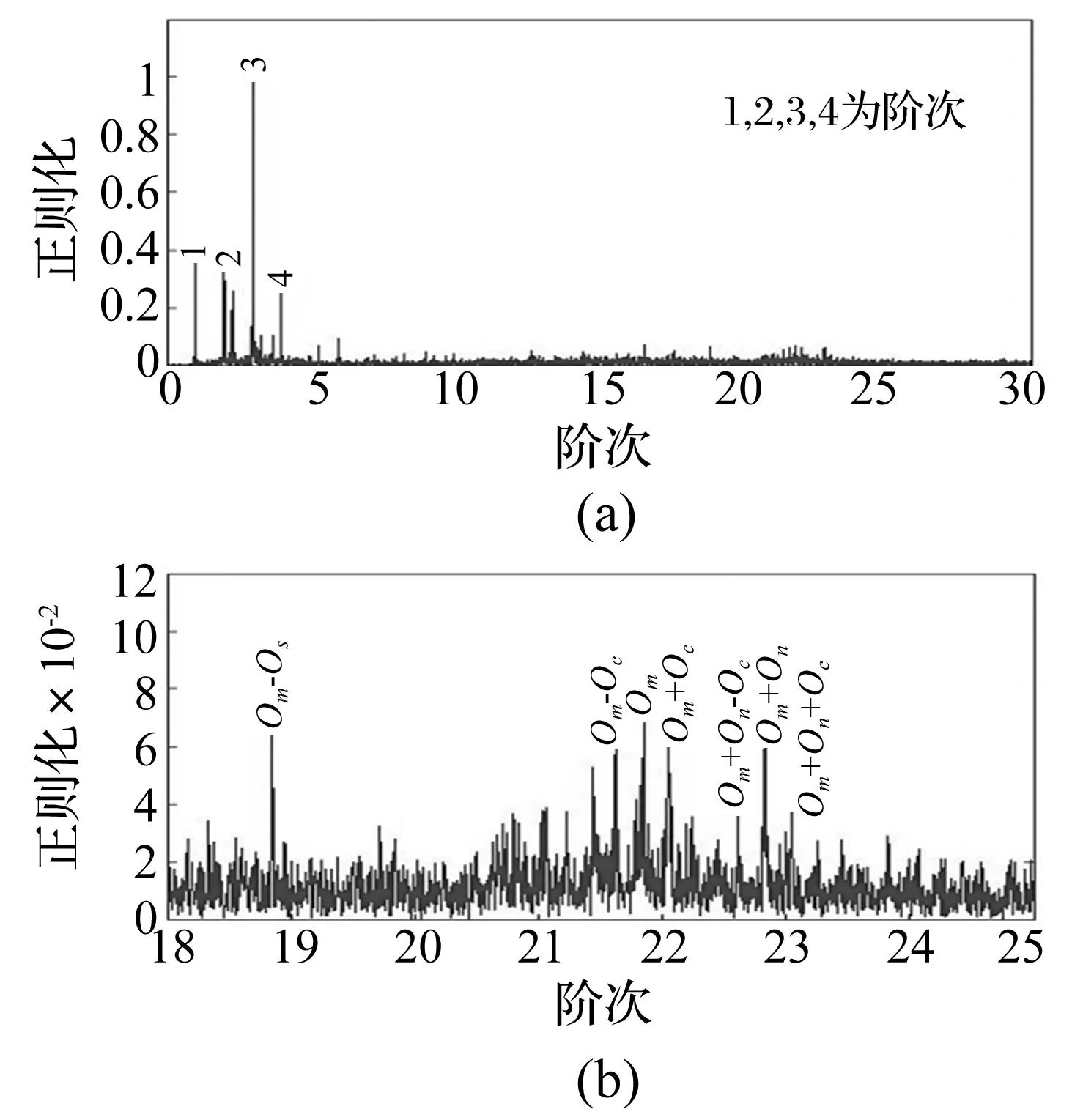
图13 断齿加速阶次Fig.13 Order spectrum of the gear with a chipped tooth
3结论
本文针对行星齿轮箱在时变工况下各个特征频率随转速变化这一非平稳性的特点,利用阶次分析在变转速旋转机械故障诊断方面的优势,分析和总结了时变工况下行星齿轮箱的各个特征阶次。并运用阶次分析技术,对变工况的行星齿轮箱故障进行了故障诊断。拓宽了变工况行星齿轮箱故障诊断研究的内容。
参 考 文 献
[ 1 ] 雷亚国,何正嘉,林京,等.行星齿轮箱故障诊断技术的研究进展[J].机械工程学报,2011,47(19):59-63.
LEI Ya-guo, HE Zheng-jia, LIN Jing,et al. Research advances of fault diagnosis technique for planetary gearboxes[J]. Chinese Journal of Mechanical Engineering,2011, 47(19):59-63.
[ 2 ] Samuel P, Pines D J. Health monitoring and damage detection of a rotorcraft planetary geartrain system using piezoelectric sensors[C]//Proceedings of SPIE, San Diego, CA, USA. 1997: 44-53.
[ 3 ] Samuel P D, Pines D J. Classifying helicopter gearbox faults using a normalized energy metric[J].Smart Materials and Structures,2001,10:145-153.
[ 4 ] Yu Jing, Yip L, Makis V. Wavelet analysis with time-synchronous averaging of planetary gearbox vibration data for fault detection , diagnostics , and condition based maintenance[C]//2nd International Conference on Mechanical and Electronics Engineering,August 1-3, 2010, Kyoto, Japan. IEEE, 2010: 132-136.
[ 5 ] 冯占辉,胡茑庆,程哲. 基于时频域状态指标的行星齿轮断齿故障检测[J]. 机械科学与技术,2010,29(6):701-704.
FENG Zhan-hui,HU Niao-qing,CHENG Zhe. Faultsdetection of a planetary gear based on condition indicatorin time-frequency domain[J]. Mechanical Science andTechnology for Aerospace Engineering,2010,29(6):701-704.
[ 6 ] 杨青乐,梅检民,肖静,等.Teager能量算子增强倒阶次谱提取轴承微弱故障特征[J].振动与冲击,2015,34(6):1-5.
YANG Qing-le, MEI Jian-min, XIAO Jing, et al. Weak fault feature extraction for bearings based onan order cepstrum enhanced with Teager energy operator [J]. Journal of Vibration and Shock,2015,34(6):1-5.
[ 7 ] 冯志鹏,范寅夕,Liang Ming,等.行星齿轮箱故障诊断的非平稳振动信号分析方法[J].中国电机工程学报,2013,33(17):105-110.
FENG Zhi-peng, FAN Yin-xi, LIANG Ming, et al.A nonstationary vibration signal analysis method for fault diagnosis of planetary gearboxes [J]. Proceedings of the CSEE,2013,33(17):105-110.
[ 8 ] 陈小旺,冯志鹏,LIANG Ming.基于迭代广义同步压缩变换的时变工况行星齿轮箱故障诊断[J].机械工程学报,2014:187-205.
CHEN Xiao-wang, FENG Zhi-peng, LIANG Ming.Planetary gearbox fault diagnosis under time-variant conditions based on iterative generalized synchrosqueezing transform[J]. Chinese Journal of Mechanical Engineering, 2014:187-205.
[ 9 ] 冯志鹏,赵镭镭,褚福磊.行星齿轮箱齿轮局部故障振动频谱特征[J].中国电机工程学报,2013,33(5):119-127.
FENG Zhi-peng, ZHAO Lei-lei,CHU Fu-lei.Vibration spectral characteristics of localized gear fault of planetary gearboxes [J]. Proceedings of the CSEE, 2013,33(5):119-127.
[10] 冯志鹏,褚福磊.行星齿轮箱齿轮分布式故障振动频谱特征[J].中国电机工程学报,2013,33(2):118-125.
FENG Zhi-peng,CHU Fu-lei. Vibration spectral characteristics of distributed gear fault of planetary gearboxes[J]. Proceedings of the CSEE, 2013,33(2):118-125.
[11] 冯志鹏,赵镭镭,褚福磊.行星齿轮箱故障诊断的幅值解调分析方法[J].中国电机工程学报,2013,33(8):107-111.
FENG Zhi-peng, ZHAO Lei-lei,CHU Fu-lei.Amplitude demodulation analysis for fault diagnosis of planetary gearboxes[J]. Proceedings of the CSEE, 2013,33(8):107-111.
[12] 冯志鹏,褚福磊.行星齿轮箱故障诊断的频率解调分析方法[J].中国电机工程学报,2013,33(11):112-117.
FENG Zhi-peng,CHU Fu-lei. Frequency demodulation analysis method for fault diagnosis of planetary gearboxes [J]. Proceedings of the CSEE, 2013,33(11):112-117.
[13] 冯志鹏,褚福磊.行星齿轮箱故障诊断的扭转振动信号分析方法[J].中国电机工程学报,2013,33(14):101-106.
FENG Zhi-peng,CHU Fu-lei. Torsional vibration signal analysis method for fault diagnosis of planetary gearboxes [J].Proceedings of the CSEE,2013,33(14):101-106.
[14] Zhao Xiao-ping, Kong Qing-peng, Guo Qing-tao. Study of time-frequency order tracking of vibration signals of rotating machinery in changing state[C]//Proc of International Symposiums on Information Processing,2008:559-563.
[15] Potter R, Gribler M. Computed order tracking obsoletes older methods[R]. SAE Technical Paper, 1989.
[16] Fyee K R, Munck E D S. Analysis of computed order tracking [J]. Mechanical System s and Signal Processing, 1997, 11 (2): 187-205.
[17] Bossley K M, Mckendrick R J. Hybrid computed order tracking [J]. Mechanical Systems and Signal Processing, 1999, 13(4): 627-641.
Fault diagnosis of a planetary gearbox based on order tracking
WANGKuang,WANGKe-sheng,ZUOMing-jian(Equipment Reliability, Prognostics and Health Management Lab,University of Electronic Science and Technology of China, Chengdu 611731, China)
Abstract:Planetary gearboxes starting, stoping and their load changes may cause variations of their rotational speed and their vibration signals with obvious non-stationarity. The vibration signals of a planetary gearbox are complex due to the complexity of its structure. The non-stationary vibration signals and their complex characteristics bring tremendous difficulties for a planetary gear box’s fault diagnosis. Here, the order tracking method was introduced into the planetary sun gear fault detection under speed variation conditions, the fault characteristic orders of a speed-varying planetary gearbox were summarized. Comparing the traditional frequency domain methods with the order tracking method was made experimentally. The results showed that the order tracking method is effective for fault diagnosis of a planetary gearbox under speed-varying conditions.
Key words:order tracking; planetary gearbox; nonstationary; fault diagnosis
中图分类号:TH17
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.05.022
通信作者王科盛 男,博士,副教授,1978年3月生
收稿日期:2015-01-13修改稿收到日期:2015-03-18
基金项目:国家自然科学基金项目(51305067;51375078)
第一作者 王况 男,硕士生,1990年3月生
