重点营运车辆定位信息在路网运行状态识别中的应用分析
2016-04-20殷浩
殷浩
(江苏省交通运输厅公路局,江苏南京 210004)
重点营运车辆定位信息在路网运行状态识别中的应用分析
殷浩
(江苏省交通运输厅公路局,江苏南京 210004)
摘要:交通运输部《公路网运行监测与服务暂行技术要求》对于交通运行数据监测、指标体系和公路出行信息发布提出了明确要求,文中针对这一要求,在分析重点营运车辆(“两客一危”车辆)运行特征的基础上,通过设计数据清洗和计算方法、补充和调整判定阈值信息,探讨了重点营运车辆实时卫星定位信息在公路网运行状态识别中的应用,并在江苏省公路网进行初步实践,说明其应用效果。
关键词:公路交通;重点营运车辆;卫星定位;公路网;运行状态识别
交通运输部于2012年下发《公路网运行监测与服务暂行技术要求》(下文简称《暂行技术要求》),用于指导和规范公路网运行监测与服务系统建设,保障全国干线公路网稳定运行,提高公路交通突发事件应急处置能力和公共服务水平。其中路段平均速度是一项重要指标,基于该指标可以定义路段拥挤度,并根据判定阈值,通过红、橙、黄、蓝、绿5种颜色表征实时的路网运行状态。现阶段大多数路网平均速度的获取是通过布设各类车检器进行采集,建设与运营维护成本较高,虽然现在全国已分阶段开展建设,但在短时间内还难以全面覆盖到位。
近几年,随着政府对重点营运车辆(“两客一危”车辆,即从事旅游的包车、三类以上班线客车和运输危险化学品、烟花爆竹、民用爆炸物品的道路专用车辆)监管的加强,这类车辆都安装了GPS或北斗卫星定位设备,以将实时的位置与速度信息传输至交通监管部门。这类信息经过加工处理,是否可以参照城市内利用出租车分析路况的方法来弥补城市间路网运行监测设施布局不足的缺陷是值得研究的课题。该文通过分析“两客一危”车辆的运行特征,将其作为浮动车加以利用,设计路段平均速度估计模型,并基于江苏省公路网的运行实例,进一步优化路段运行状态判定阈值,为路网运行状态识别和分级提供参考依据。
1 重点营运车辆及其运行特征分析
由于“两客一危”车辆一旦发生事故容易引发群死群伤等恶性重大事故,交通运输主管部门将其列为重点监管车辆,强制要求其安装北斗或GPS等卫星定位设备,将车辆定位信息实时上传至交通运输主管部门,以便对其行驶线路和速度统一监管。
目前,许多城市利用出租车的卫星定位信息来判断市内交通状况,但不能将“两客一危”车辆简单地作为普通浮动车加以利用,因为这类车辆与路网中行驶的普通车辆不同,具有车型结构单一、行驶时间受限及运行路线固定等特征。为探讨如何利用其作为浮动车样本来分析路网运行状态,对其运行特征进行分析。
(1)车型结构单一。“两客一危”车辆的组成主要为大型客车和大型货车及少量中型客、货车。由于车型结构较为单一,运行速度仅能代表大中型车辆的行驶速度,缺乏小型车辆行驶速度,运行速度较低,不能代表路段的平均车速。但正是这一特点,这类车辆速度可以表征当前路段运行的最低车速,如果最低车速已达到畅通或基本畅通水平,则认为当前路段运行是畅通的,而且利用公路部门交通量统计分析数据可推算出路网的正常运行车速。
(2)行驶时间受限。大部分“两客一危”车辆行驶时间均在白天,根据国家要求,凌晨2—5点所有长途客运车辆和危险品车辆禁行,行驶时间段受限。如客运班线车辆一早由始发地前往目的地后,可能在下午较晚时才会启程返回;危险品运输车辆在完成单次运输任务后则可能存在相当长时间的停驶整备时段。但“两客一危”车辆行驶的时间正是路网运行的高峰时段,往往最容易出现拥堵缓行,此刻浮动车的样本是最有价值的。
(3)运行线路固定。绝大多数长途行驶的“两客一危”车辆都会有固定的行驶路线,部分车辆的行驶路线还需上报交通、安全监管部门报批备案。虽然行驶路线固定,但均是各省路网的主干线路,结合已建设的交通量调查站点、车检器,能代表路网的总体运行情况,而且固定的行驶路线有利于技术处理时车辆信息与路线的匹配。
通过以上分析,发现将“两客一危”车辆信息处理后,可以作为浮动车加以利用,而且可以反映路网的运行状态,为行业管理与公众出行服务。
2 利用“两客一危”车辆信息的公路运行状态识别方法设计
2.1 设计思路
根据《暂行技术要求》,路段平均速度是进行路段拥挤度(即路段运行畅通状态)判别的唯一要素,所以将“两客一危”车辆作为浮动车,利用其卫星定位数据(以下统称GPS数据)来分析识别公路运行状态应围绕车辆行驶速度数据的采集、处理等过程展开。设计思路如图1所示。

图1 利用“两客一危”车辆信息的公路运行状态识别设计思路
2.2 数据清洗
除坐标偏移跳动、数据不完整或数据失真等常规数据错误或无效性清洗外,由于GPS数据量较大,针对“两客一危”车辆运行特征,还需根据识别路段的具体位置对停驶车辆信息和区域外车辆信息进行清洗,以减轻后期数据分析和计算压力。由于停驶车辆不仅对公路运行状态识别无用,还容易造成道路拥堵误判,首先应根据车辆上传位置等信息开展停驶车辆信息清洗。一般只需将车速为零的信息剔除即可,以江苏省“两客一危”的实际数据为例,该部分数据占到上传数据的大半。其次是运行车辆位置的清洗,由于研究目标是分析城际间国省干线公路的运行状态,城市内行驶车辆对公路运行状态识别无用,可根据管养边界建立电子围栏,清洗所有城市道路上行驶的车辆信息。若仅需对普通干线公路运行状态进行识别,还需对高速公路上行驶车辆信息进行清洗。
2.3 车速计算
为了提高路段运行状态的识别准确度,通过数据融合方法将某路段上所有GPS浮动车的单车区间速度结果融合为多车区间速度,然后利用该路段所有GPS浮动车的全部瞬时速度估计多车瞬时速度结果,最后把多车区间速度结果和多车瞬时速度结果融合得到路段的平均速度(如图2所示)。

图2 路段平均速度估计方法
其中单车数据计算方法如下:单一浮动车经过路段i时,并不是恰好在路段起终点回传数据,而是在起终点间任意位置回传数据。因此,计算单一浮动车在路段i上的平均速度的计算公式为:

2.4 阈值调整
2.4.1 阈值表的补充
《暂行技术要求》关于“公路网运行状态监测与服务指标的测算”中对高速公路设计速度80、100、120 km/h和普通干线公路设计速度60或80、100 km/h的情况给出了运行状态速度判定标准,但对其他设计速度没有判定标准。可考虑使用前后阈值插值计算方式进行填补,并采用“满2.5进5”的形式取整。对于设计速度70 km/h的普通干线公路,则考虑使用原“80 km/h或60 km/h”标准代替。利用上述方法对标准进行补充后的完整判定标准如表1所示。

表1 公路网不同等级路段运行状态划分标准 km/h
2.4.2 阈值表的调整
浮动车判定标准可通过在现有判定标准上乘以一个调整系数的方式确定。首先通过交通量调查的历史统计数据分析得到初始调整系数,此后按照一定的时间根据实际调查或最新的统计数据汇总进行修正。通过对江苏省现有交通量调查站点或路网车检器历史车速数据进行分析,求得干线公路中“两客一危”车辆作为浮动车车型速度与平均车速的比值,进而得到初始调整系数(如表2所示)。

表2 “两客一危”浮动车判定标准初始调整系数
利用调整系数对现有状态判定标准进行调整并取整,即可得到“两客一危”车辆数据用于高速公路、普通公路运行状态识别的初始判定阈值标准(如表3所示)。

表3 基于“两客一危”浮动车数据的路段运行状态划分标准 km/h
将计算所得路段平均速度与表3中的划分标准进行比对,即可得到该路段当前的运行状态。
3 应用实例
3.1 数据清洗
浮动车GPS数据清洗主要针对停驶车辆。以江苏省2014年3月24—30日“两客一危”车辆上传的GPS数据为例,停驶车辆数据情况如下:
(1)零速度记录数305 021 489条,占70.84%。速度分布情况如表4所示,零速度记录分布情况如表5所示。
(2)全天速度为零的静止车辆平均每天约7.5万辆,占监测车辆总数的15.05%,相应的数据记录数量占10.81%(如表6所示)。
3.2 车速计算
使用式(1)对路段平均车速进行计算,得出判定车速值。以京沪(北京—上海)高速公路江苏段某日晚高峰19:00—19:05的GPS数据为例,数据处理结果如表7所示。

表4 车速数据分布

表5 零速度数据分布

表6 零速度数据和车辆分布
3.3 状态判断
利用表3和表7对京沪高速公路交通运行状态进行判定,结果如表8所示。

表7 路段车速数据处理结果 km/h
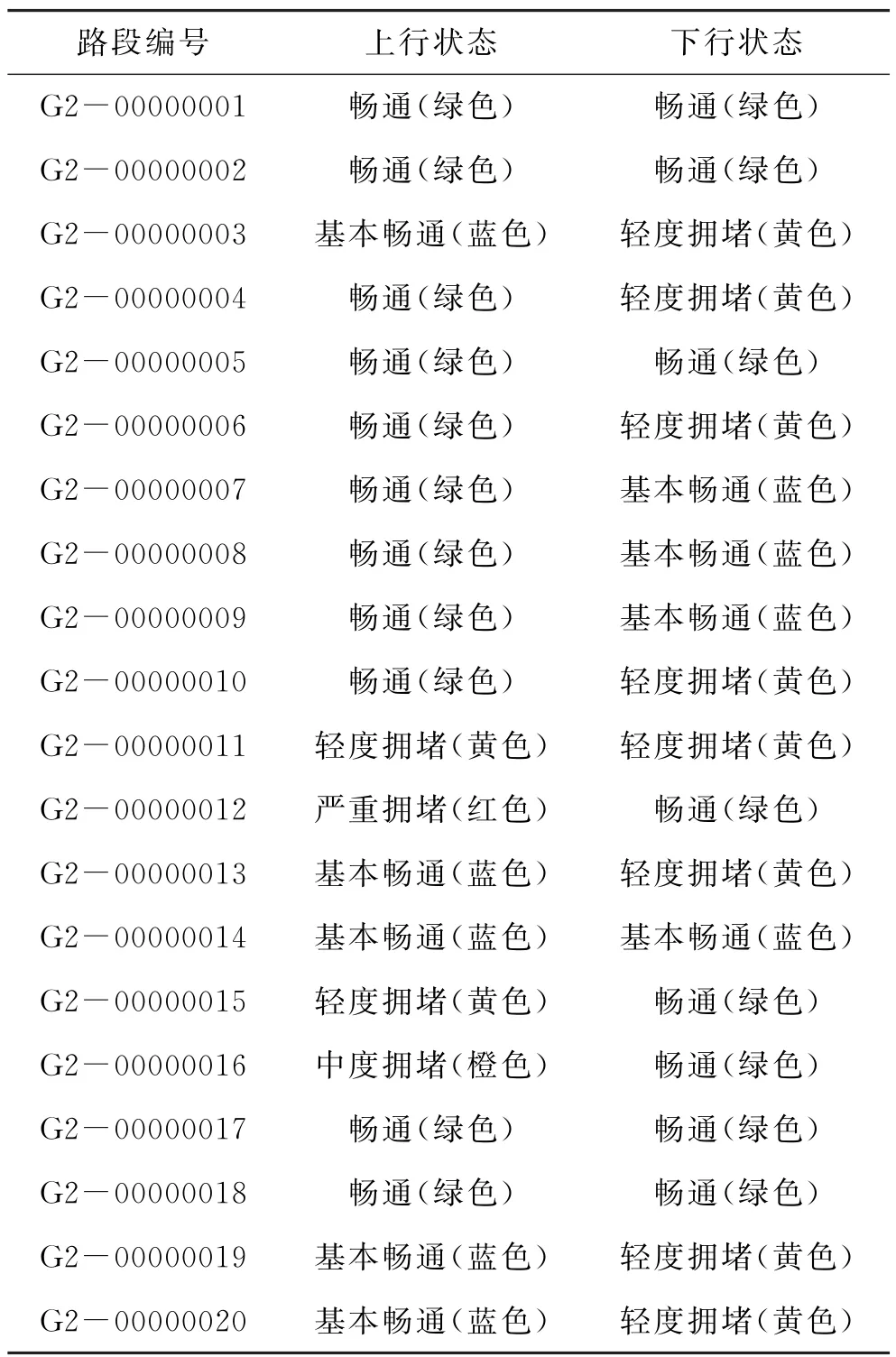
表8 路段交通运行状态判定结果
将表8所示路段运行状态结果与该时段视频监控结果进行比对,分析结果与实际运行状态基本一致,可见该方法在实践中是可行的。
4 发展与展望
利用重点营运车辆卫星定位信息进行公路网运行状态识别的方法目前已在江苏公路系统得到实际应用,很大程度上弥补了现阶段省内路网运行监测设施,特别是普通公路设施布设不足的缺陷,为路网运行状态的实时判断提供了有力的数据支撑。在今后的应用中还可在如下方面进一步探讨和优化:
(1)对数据的处理应根据实际数据量大小和处理时效要求灵活调整。目前,江苏省“两客一危”车辆5 min内的GPS数据实时上传量已达到10万条,如仅按每5 min更新的要求,所有GPS数据都要在5 min内完成所有的处理和计算工作,这就需要提升计算性能,优化计算策略。
(2)应根据未来数据的变化对阈值及时作出调整。由于交通量调查站点调查数据精度有限,且大多数位于普通国省干线公路,对全路网的代表性不足,后期,一方面应根据实际调查数据或其他精确数据对调整参数进行调整,另一方面可以根据“两客一危”的具体车型信息制作更加精确的分车型判定阈值表,提高状态判定精度。
参考文献:
[1]交通运输部2012年第3号公告,公路网运行监测与服务暂行技术要求[S].
[2]李华.加强干线公路网运行管理 提升公路智能化服务水平[J].中国公路,2012(9).
[3]周永兵,朱靖玉.“两客一危”GPS卫星定位系统车载终端设计[J].电子设计工程,2012,20(9).
[4]曹晶,李清泉.城市路网中浮动车数据和线圈数据的融合[J].交通信息与安全,2008,26(4).
[5]胡明伟.基于GPS的实时交通信息采集方法的研究[J].公路交通科技,2007,24(5).
[6]诸彤宇,郭胜敏.浮动车信息处理技术研究[J].中国图象图形学报,2009,14(7).
[7]王晓原,张敬磊,吴芳.交通流数据清洗规则研究[J].计算机工程,2011,37(20).
[8]包从剑.数据清洗的若干关键技术研究[D].镇江:江苏大学,2007.
[9]董均宇.基于GPS浮动车的城市路段平均速度估计技术研究[D].重庆:重庆大学,2006.
[10]姜桂艳,常安德,李琦,等.基于出租车GPS数据的路段平均速度估计模型[J].西南交通大学学报,2011,46(4).
[11]渐猛.基于浮动车的道路交通状态判别方法研究[D].淄博:山东理工大学,2013.
[12]余丰茹,单飞,张晓楠,等.基于全车牌识别数据的高速公路交通拥挤识别[J].公路与汽运,2014(3).
[13]吕篷.河北省高速公路视频联网监控系统构想[J].中国交通信息化,2014(1).
[14]刘贺楠.高速路网交通运行状态评价与判定方法研究[D].重庆:重庆交通大学,2010.
[15]王力,王川久,张海,等.基于浮动车的城市动态交通信息采集处理方法研究[A].第一届中国智能交通年会论文集[C].2005.
收稿日期:2016-01-08
中图分类号:U491.2
文献标志码:A
文章编号:1671-2668(2016)02-0026-05
