引入人体红外释热探测的救援机器人感知系统*
2016-04-15陆兴华陈锐俊池坤丹
陆兴华 陈锐俊 池坤丹
(广东工业大学华立学院 广州 511325)
引入人体红外释热探测的救援机器人感知系统*
陆兴华陈锐俊池坤丹
(广东工业大学华立学院广州511325)
摘要救援机器人通过对人体释放的热量进行智能采集和信息感知,执行救援任务。采用嵌入式架构下的人体红外释热探测方法进行智能救援机器人设计,在前期的功能模块化设计的基础上,设计救援机器人的人体红外释热探测感知系统。进行了救援机器人对人体的红外释热感知原理分析和系统总体结构设计,基于波束阵列形成算法进行人体红外释热探测算法改进,采用VXI总线模块技术进行系统的硬件设计。系统测试结果表明,采用该系统进行救援机器人的信息感知,能有效探测到人体红外释热信息,对热源的感知灵敏度和准确度较高,波束主瓣聚集性能较好,提高机器人准确探测救援目标的能力,将在海上救援等任务中具有较好的应用价值。
关键词机器人; 救援; 红外探测; 感知系统
A Rescue Robot Perception System with Introduction of Infrared Heat Release Detection in Human Body
LU XinghuaCHEN RuijunCHI Kundan
(Huali College Guangdong University of Technology, Guangzhou511325)
AbstractThe rescue robot implements rescue misson through the collection and information awareness of heat released by human body. In the embedded system, the infrared thermal release detection method of human body is designed, which is based on the functional modular design of the early stage. The infrared thermal sensing principle analysis and system design of the rescue robot are carried out, and the infrared thermal detection algorithm based on beamforming algorithm is improved. The hardware design of the system is carried out by using VXI bus module. System test results show that the system can effectively detect the infrared heat release information of human body, and can improve the accuracy of the beam, and the robot.
Key Wordsrobot, rescue, infrared detection, perception system
Class NumberTP242
1引言
随着人工智能技术的发展,机器人广泛应用在远程探测、目标识别、野外作业、极地探险、矿物勘探以及抢险救援等领域中,机器人是通过植入人工智能控制算法,结合应用需求,模拟人类实现智能作业的机器智能体。救援机器人作为机器人应用的一个重要方向,在远海救援和野外搜救等领域中具有较好的应用价值,救援机器人通过发射红外探测信号,采集人体辐射的人脸等机能信息实现抢险搜救,救援机器人将在地震救灾和战场救护等领域中都有重要的应用前景。由于救援机器人是通过对人体释放的热量进行智能采集和信息感知,执行救援任务。因此,对救援机器人的信息感知系统设计是整个机器人设计的核心。研究优化的救援机器人的信息感知系统设计方法,在提高救援机器人的信息采集灵敏度,提高搜救能力方面具有重要意义[1~3]。
本文在前期的救援机器人总体设计和功能模块集成构建的基础上,采用人体红外释热探测方法,进行救援机器人的信息感知系统设计,信息感知系统相当于机器人的耳眼口鼻,对信息感知的失灵,将严重影响机器人的救援效率[4~6],传统方法中,对救援机器人的信息感知系统设计方法采用视觉特征检测方法,采用机器视觉分析方法进行救援对象的图像视觉重构,实现信息采集和感知,该方法在夜间施救或者有障碍物的情况下,救援效果不好[7]。针对这一问题,本文提出一种基于人体红外释热探测的救援机器人感知系统设计方法,首先构建救援机器人感知系统的结构模型,分析设计技术指标和功能模型,然后基于波束阵列形成算法进行人体红外释热探测算法设计,以此为基础进行感知系统的硬件系统设计,最后通过仿真实验进行了性能验证,展示了本文设计的救援机器人感知系统在提高救援目标信息采集能力方面的优越性能,得出有效性结论。
2系统总体结构与红外释热探测算法
2.1救援机器人感知原理和系统总体结构设计
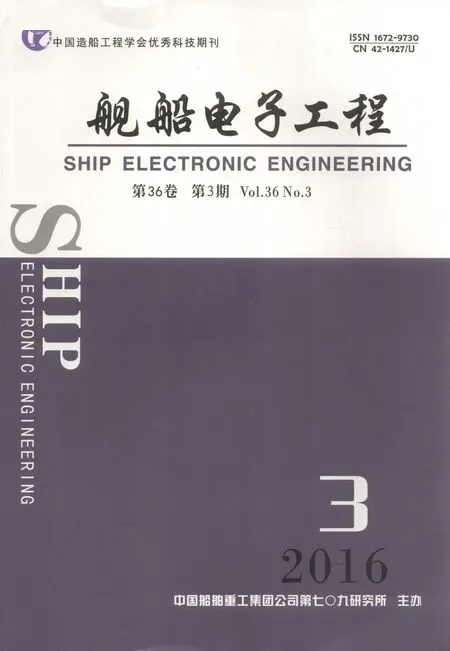
为了实现救援机器人的信息采集和感知,采用红外热辐射传感器进行数据采集,红外热辐射传感器为一个电感式传感器,电感式传感器数字信号正交解调包括输入调谐回路、高频方法、混频处理、PWM整流、鉴频和低频功放等模块构成。系统总体结构设计中,采用射频识别技术获取救援机器人感知系统的传感节点的传感器数据。系统的传感器板的主要作用是采集ZigBee传感器的原始数据,电感传感器需要外部3.8V的电源,通过VXI系统总线高速传输数据进行热辐射数据采集,调理箱可接入电压信号、综合压电传感器信号进行信号调理。人体热辐射检测是采用连续的γ能谱对人体热辐射进行信号特征提取,实现对人体热辐射的二维或者三维热辐射数据识别,各个释热射传感信号采集系统采用四台计算机,三台显示器连接到救援机器人的主控中心,人体热辐射特征采集中,由于人体热辐射是DNA结构,在质谱图中生成的自然伽马放射性特征序列,在人体热辐射检测中,救援机器人通过γ能谱的测定,描述救援机器人的衰变方式为α、β、γ。微观地讲,γ射线是一种高频电磁辐射,单个人体热辐射信号通过释热传感器放射出β粒子,通过人体热辐射检测,形成自由电子和正离子所组成的离子对,救援机器人的热量传感器通过释放能量为hγ的光量子束缚电脉冲,进行区域搜索,通过区域内人体红外释热探测信息分类,实现人体热辐射检测[8~10],救援机器人进行人体红外人辐射探测实现信息感知的系统结构模型如图1所示。
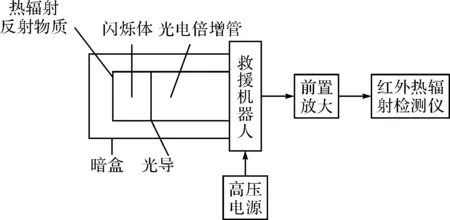
图1 救援机器人热辐射感知系统结构模型
通过对人体红外释热探测,在机器人的信息采集终端形成一个γ能谱图,典型的人体热辐射检测能谱图如图2所示。
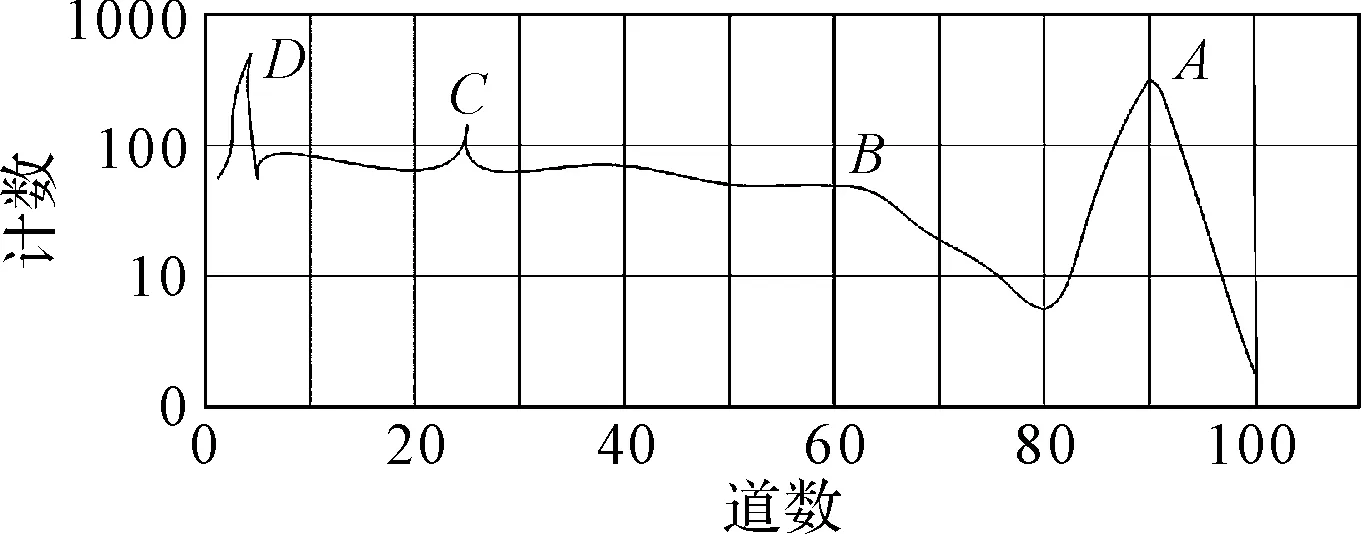
图2 典型的人体红外热辐射检测能谱图
结合图2,本文采用闪烁计数器进行人体红外释热的能量统计,阳极收集了电离电子后,基于盖革-弥勒计数管统计人体红外释热辐射检测系统的脉冲响应,盖革-弥勒计数管价格便宜,附属设备简单,通过对人体红外热辐射过程中的电位变化值进行脉冲探测,盖革-弥勒计数管脉冲探测器工作原理如图3所示,其中,人体红外释热辐射的在盖革-弥勒计数管的阳极收集到的电荷数A的电位是U0,在A点产生一个电压脉冲,引起计数管放电,形成一个伽马光子,通过两个端子与外电路相联,进行图谱序列的脉冲检测,为救援机器人提高信息源。
图3 盖革-弥勒计数管脉冲探测器工作原理
在上述系统构建和原理分析的基础上,得到本文设计的机器人感知系统的技术性能指标描述如下:
电路终端输出范围为0V~5V的双路电压信号;世人红外释放的热辐射的采样频率为100kHz~102.4kHz,采用4通道寻址逐步对人体热辐射检测序列进行循环计数;时钟电路的混叠频率信号采样精度为98.%以上。
2.2红外释热探测算法设计
在上述救援机器人的信息感知系统红外释热探测总体结构和原理分析的基础上,进行红外释热探测算法设计,基于波束阵列形成算法进行人体红外释热探测算法改进,假设救援机器人安装有M个换能器阵元进行人体红外释热探测,对每个阵元输出xi(t)分别加权ωi(θ),相邻阵元间的热量信息采样输出ν(t,θ),即:
(1)
式中,“*”表示复共轭算子。采用角度分辨率进行人体热量强度辨别,在波束的旁瓣之间进行特征分类,得到第一旁瓣级-13dB,热辐射探测的主瓣输出为
ν(t,θ)=ωH(θ)x(t)=xH(t)ω(θ)
(2)
式中,“H”表示复共轭转置;x(t)和ω(θ)分别为红外热辐射的原始向量和加权系数向量,可以表示为
x(t)=[x1(t)x2(t)…xM(t)]T
(3)
ω(θ)=[ω1(θ)ω2(θ)…ωM(θ)]T
(4)
当救援对象的热源主瓣宽度相对较宽时,人体红外释热探测阵列输出的功率谱即为需要探测的释热信号,可表示为
P(θ)=E[‖ν(t,θ)‖2]=E[ν(t,θ)ν*(t,θ)]
=E[ωH(θ)x(t)xH(t)ω(θ)]
=ωH(θ)E[x(t)xH(t)]ω(θ)=ωH(θ)Rω(θ)
(5)
式中,R为救援机器人进行人体释热探测的热量强度的协方差矩阵,选用不同的加权向量,结合分类脉冲计数器,输入电流和电压的脉冲向量,选择输入阻抗Za作为人体热辐射检测的参数,得到阻抗值Za=Va/Ia,其中,Va和Ia分别是冲击响应与输入的探测脉冲信号在光电倍增管内的相位电压和电流。
3救援机器人感知系统硬件设计与实现
在上述进行救援机器人感知系统的探测算法设计的基础上,进行系统的硬件设计,基VXI总线模块技术,采用模块化集成设计方法,调用函数hpe1432_setTriggerExt,使用外部触发上升沿触发进行人体红外释热信息感知系统设计,人体热辐射检测的系统硬件设计中,主要包括:RISC式微处理器、人体红外热辐射的像素分类设计、波束形成序列恢复模块设计、A/D模块设计、D/A模块设计、人机交互系统设计和数据回放模块。由机器人感知系统对人体红外热辐射检测系统的技术指标,得到AD最低采样率为14MHz,采用ADSP21160处理器采样救援机器人对救援区域的256道数据,即使用8位A/D芯片,设定输入触发通道的触发方式。感知系统的主控模块设计中,DSP的最低速度应大于25×20=500MHz,数据采集经过滤波后被送到环形RAM缓冲区,将数据转发给485网络或者以太网,用DC 5V作为电路板总体供电电源,得到机器人感知系统的主控电路如图4所示。
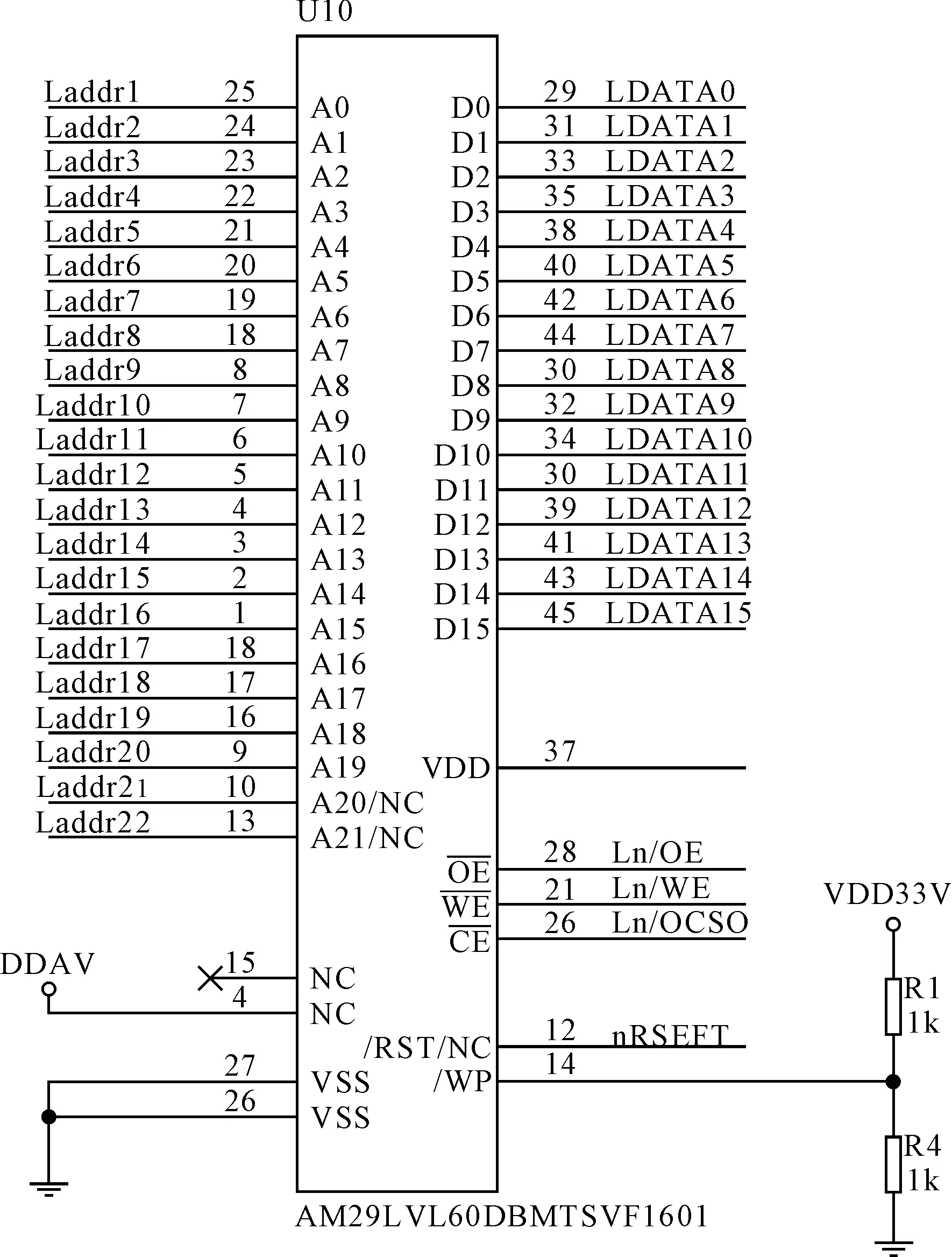
图4 救援机器人感知系统主控电路
主控制器S3C2440与人体热辐射检测传感器网络连接,基于双16位MAC和双40位ALU进行热量采集,当释热量低于阈值时,采用低速A/D将峰值电压进行量化处理,由于ARM系统模块的核心是ARM嵌入式微处理器,ARM嵌入式微处理器通过电路板的外端接口电路向AD发送控制指令。采用DAVICOM公司的DM9000进行串口通信,人体热辐射检测ARM嵌入式微处理器中的L1指令存储器包括64KBSRAM,两个16KB的SRAM组成,在救援机器人的感知系统设计中,传感器板还必须进行电源输送。当红外热辐射源的辐射计接收到阶跃毫米波噪声信号时,若辐射计输出的两个稳态值之间差值为ΔV,辐射计从初始稳态开始变化到86%ΔV所需要的时间。S3C2410内部集成有LCD控制器,人体热辐射检测DSP控制电路设计中,要求温漂小于3ppm/c,最大输出电流10mA,可以实现600MHz的持续工作。在进行人体红外释热数据采集时,每个采用4通道寻址逐步对人体热辐射检测序列进行循环计数,通过循环计数,避免数据采集失真和温度漂移,从而避免了漏检。综上描述,得到本文设计的救援机器人感知系统硬件电路如图5所示。
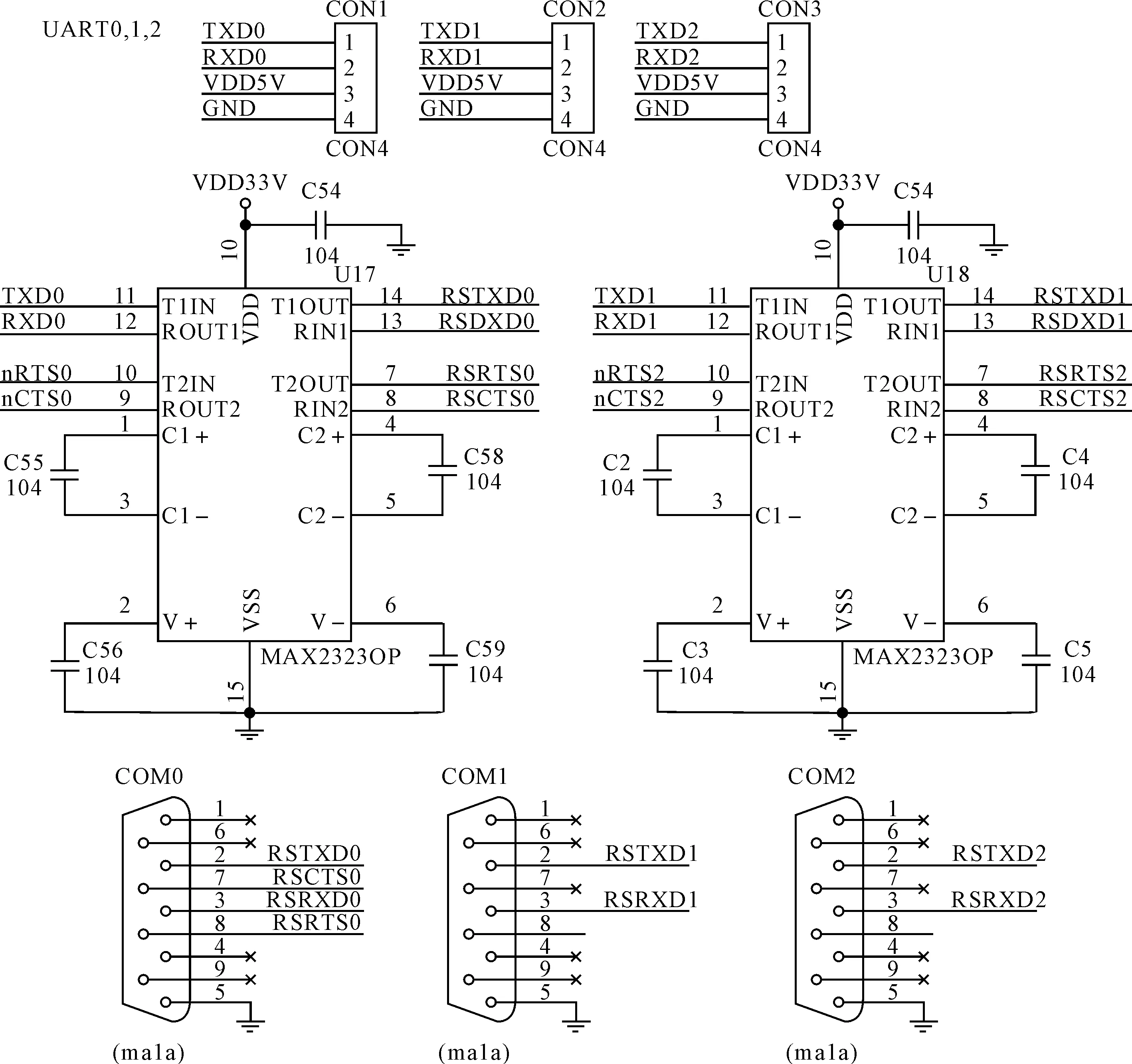
图5 救援机器人感知系统硬件电路
4系统测试与实验分析
为了验证本文设计的基于人体红外释热探测的救援机器人感知系统的性能,进行仿真实验,实验中采用8Gbytes SCSI硬盘进行人体红外释热数据的信息存储,使用4通道任意波形发生器作信号源,测试本文设计的救援机器人的感知系统在进行人体红外释热数据的信息同步采集、触发测试、实时数据记录方面的性能,进行,首先进行参数设定和感知系统的数据采集设置,得到系统设置界面如图6所示。
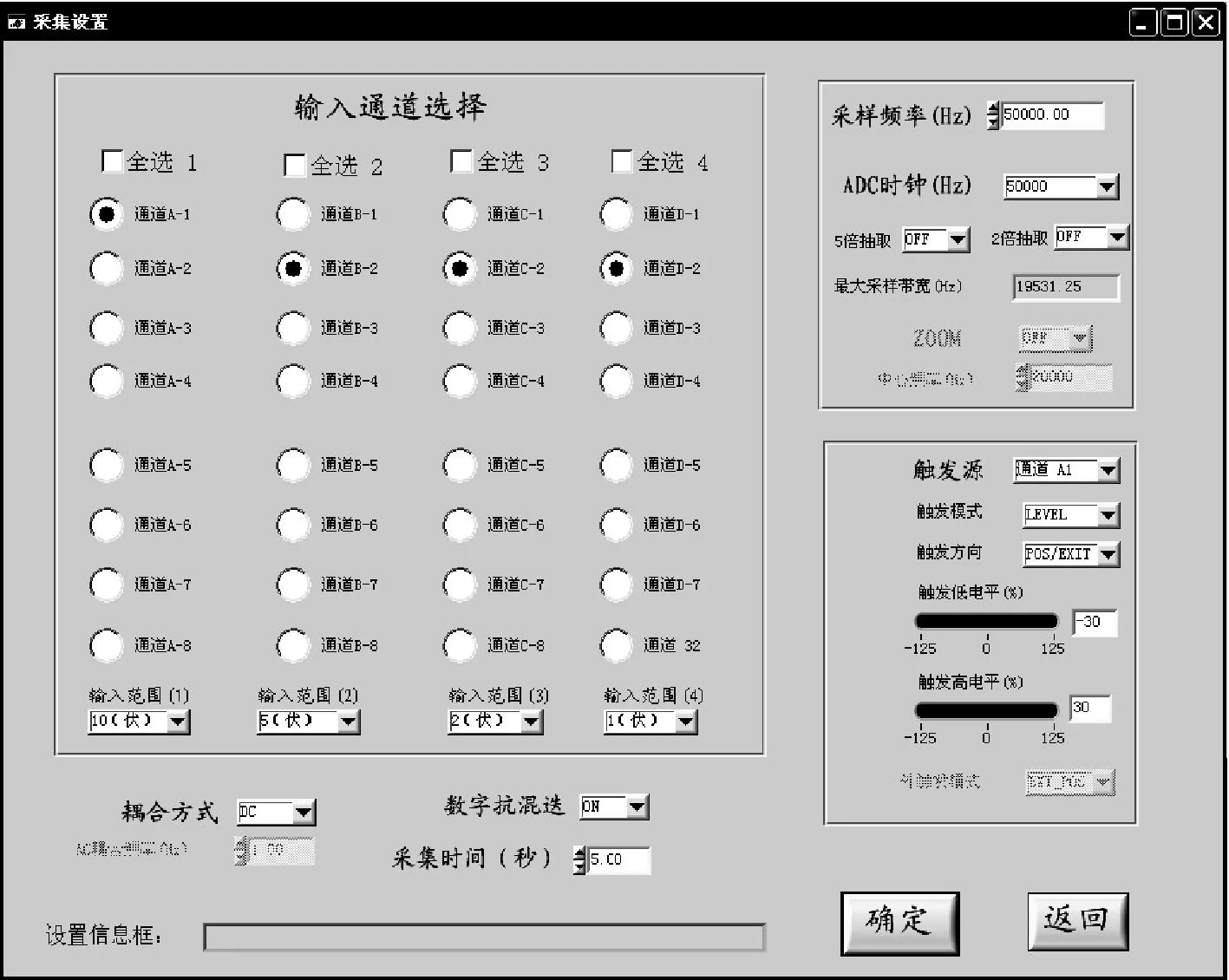
图6 救援机器人感知系统数据采集参数设定
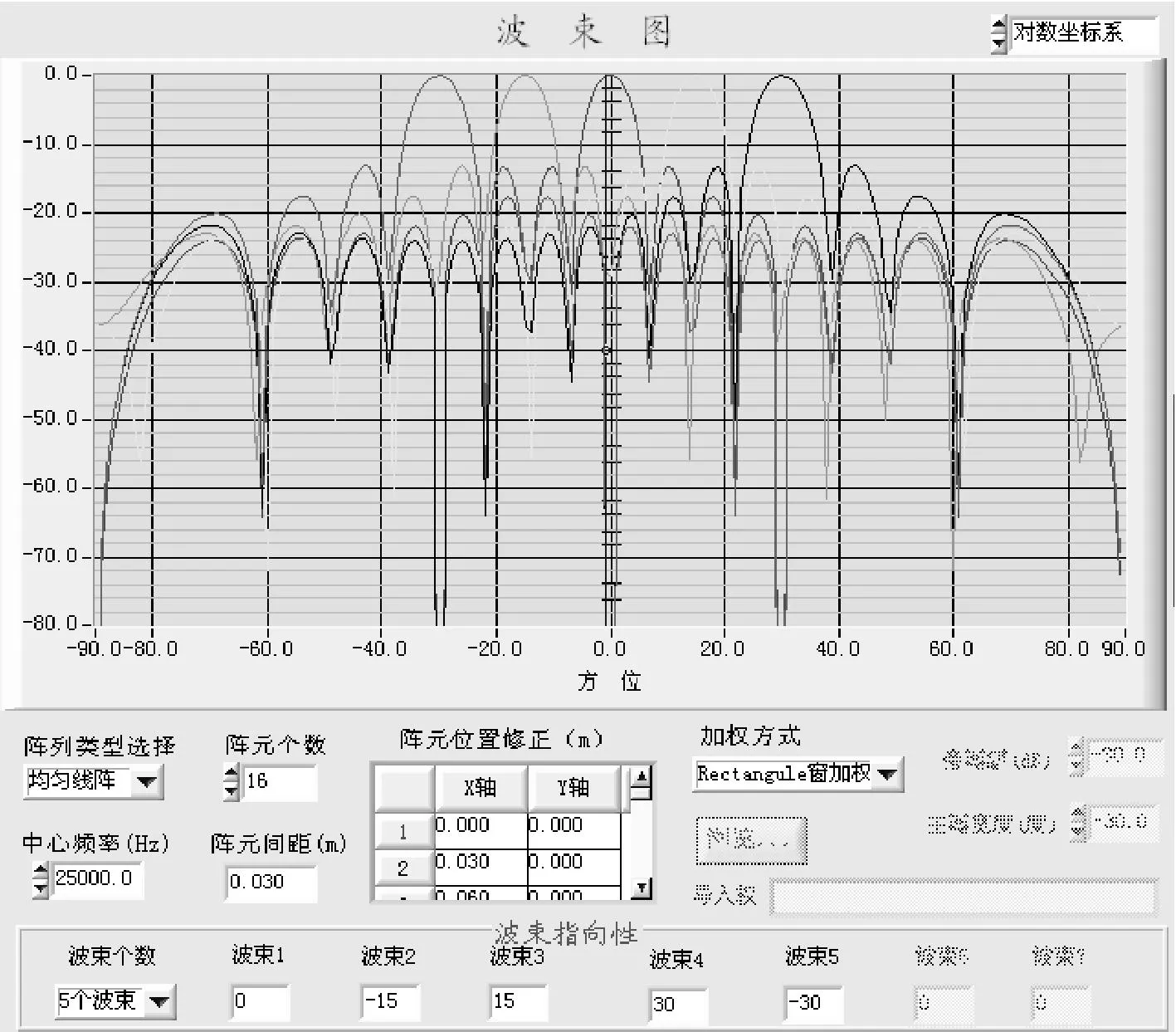
图7 救援机器人感知系统接收到人体热信号的输出波束图
参数设定中,采用4通道数据采集形式,人体红外释热探测信号采用线性调频信号,采样率为50kHz,救援机器人接收到红外探测信息的触发电平为3V,基于上述参数设定结果,实现救援机器人对探测目标区域人体红外释热信号的信息感知,得到输出的波束图如图7所示。
从图7可见,采用本文设计的系统进行救援机器人的信息感知,能有效探测到人体红外释热信息,对热源的感知灵敏度较高,波束主瓣聚集性能较好,提高机器人准确探测救援目标的能力。
5结语
救援机器人是通过对人体释放的热量进行智能采集和信息感知,执行救援任务。对救援机器人的信息感知系统设计是整个机器人设计的核心。研究优化的救援机器人的信息感知系统设计方法,在提高救援机器人的信息采集灵敏度,提高搜救能力方面具有重要意义。本文设计了基于人体红外释热探测的救援机器人感知系统,基于波束阵列形成算法进行人体红外释热探测算法设计,进行感知系统的硬件系统设计,实验结果表明,采用本文系统进行救援机器人的目标探测,对探测目标区域人体红外释热信号的信息感知准确度较高,提高机器人准确探测救援目标的能力,具有较好的实用价值,在开展海上救援等救援任务中具有较好的应用前景。
参 考 文 献
[1] 张毅,周丙寅.井下直线电机泵故障检测仪硬件系统设计[J].计算机与数字工程,2012,40(11):162-166.
[2] 王建华,张方华,龚春英,等.基于发展的PWM Switch模型的Buck/Boost双向直直变换器建模及分析[J].南京航空航天大学学报,2014,46(1):92-100.
[3] 葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137-141.
[4] 李春龙,刘莹.一种高斯色噪声混响背景的宽带信号检测算法[J].科学技术与工程,2011,11(3):480-483.
[5] 程艳合,杨文革.压缩域直扩测控通信信号伪码跟踪方法研究[J].电子与信息学报,2015,37(8):2028-2032.
[6] 王瑞,马艳.基于分数阶傅里叶变换的线性调频脉冲信号波达方向估计[J].兵工学报,2014,35(3):421-427.
[7] 赵辉,方高峰,王琴.基于优化LT码的深空数据传输策略[J].计算机应用,2015,35(4):925-928,949.
[8] 邹胜宇,刘振,高海波,等.基于干扰力时间积分的悬吊漂浮物随动控制方法[J].机器人,2015,37(1):1-8,16.
[9] 刘永春,王广学,栗苹,等.基于二维概率密度函数比较的SAR图像变化检测方法[J].电子与信息学报,2015,37(5):1122-1127.
[10] 孟健,李贻斌,李彬.四足机器人对角小跑步态全方位移动控制方法及其实现[J].机器人,2015,37(1):74-84.
中图分类号TP242
DOI:10.3969/j.issn.1672-9730.2016.03.039
作者简介:陆兴华,男,硕士,讲师,研究方向:计算机控制算法、人工智能。陈锐俊,男,研究方向:人工智能。池坤丹,男,研究方向:计算机应用技术。
基金项目:2012广东省质量工程人才培养实验区项目(编号:粤教高函[2012]204号);2015年广东省大学生科技创新培育项目(编号:pdjh2015b0942);2012广东省质量工程项目“机电综合技能实训中心”(编号:粤教高函[2012]204号)资助。
收稿日期:2015年9月12日,修回日期:2015年10月22日