一种基于水声特征的辅助关联算法*
2016-04-15蒲勇
蒲 勇
(江苏自动化研究所 连云港 222061)
一种基于水声特征的辅助关联算法*
蒲勇
(江苏自动化研究所连云港222061)
摘要针对声纳探测特性,提取了几个有效的目标特征信息;结合水面水下目标运动规律,构建了短时位置预测模型;基于联合概率密度关联算法架构,提出了特征辅助的关联算法模型,基本实现了利用声纳特征辅助多目标进行关联融合,提高了复杂环境下的关联正确率。
关键词水声; 特征辅助; 预测; 数据关联
Data Association Method Based on Acoustic Feature
PU Yong
(Jiangsu Automation Research Institute, Lianyungang222061)
AbstractAimed at detection characteristics of sonar, some volid target feature information is extracted. Combined with surface and underwater targets move rules, target’s position prediction model for short time is designed. Based on joint probabilistic data association algorithm, featured-aided association method is provided. Simulation proves the method can use features to correlate and fuse of multi-targets, and improves correct fusion rate in complex situation.
Key Wordsacoustic, feature-aided, prediction, data association
Class NumberTP301
1引言
数据关联是在杂波或多目标背景条件下实现对目标进行稳定、正确跟踪的关键技术,检测过程中的随机虚警、由于邻近所关心目标的虚假反射或者辐射体产生的杂波、干扰目标、诱饵或其他对抗等使得量测与目标的正确关联变得异常困难。
经过国内外研究者数十年的研究,已经取得了一定的研究成果[1~4]。传统的数据关联都是基于目标运动学参数(如位置、速度、加速度等)进行的,即通过对目标运动模型进行递推获得关于目标当前的运动学参数预测值,再与传感器量测(或量测转换)数据进行关联。但在复杂应用条件特别是军事应用中,单纯基于运动学参数的数据关联面临着严峻的挑战:一是高度密集的杂波环境大大增加了传感器量测数据的不确定性,从而在增加关联算法复杂度的同时降低了关联结果的准确性;二是多目标(尤其是量测间断目标)环境数据关联的复杂性和不确定性,极易导致误跟、失跟现象。无论是在密集目标还是间断量测条件下,单纯通过目标运动学参数难以达到最佳的数据关联效果。
随着传感器技术的发展,除了能探测目标的运动信息之外,还能获得目标的一些特征信息,这些特征信息可能与运动学参数具有一定的相关性,也可能独立于运动学参数,但由于特征信息表征的是不同类型、个体目标所固有的独特属性,在减少可能关联量测数、降低关联配对的不确定性和维持复杂条件下对目标的稳定跟踪方面具有巨大的潜力,因此基于特征辅助的数据关联算法在近年来受到越来越多的关注。
2算法思路
特征辅助的数据关联是个较新的研究领域,其技术发展不过十多年的历史,但这一技术在复杂条件下的目标跟踪中却有着广阔的应用前景,尤其是对于水下复杂的声探测环境而言。已有文献提出了一些特征辅助关联方法[5~7],如利用目标的多普勒信息、目标的径向长度、检测信号的幅度等。其中一些方法将目标运动要素与特征联合处理,类似于状态方程一样构建特征方程,利用非线性滤波(如扩展卡尔曼滤波EKF)进行滤波处理。但是,构建的特征方程往往难以完全符合实际情况,引入的建模误差给跟踪性能带来了一定的影响。
另一种思路是将目标特征信息仅用来作数据关联,而特征信息的处理单独进行,采用专门的方法进行提取。也有相关的文献对此进行了论述,例如利用GPDA方法的特征辅助关联方法[8~9]。本文也采用该思路,主要思想是针对水声探测条件下断续、交叉等复杂情况,结合目标运动要素预测方法,在传统的多目标概率关联算法中,引入水声特征信息进行辅助关联,提高关联正确性。具体技术框图如图1所示。
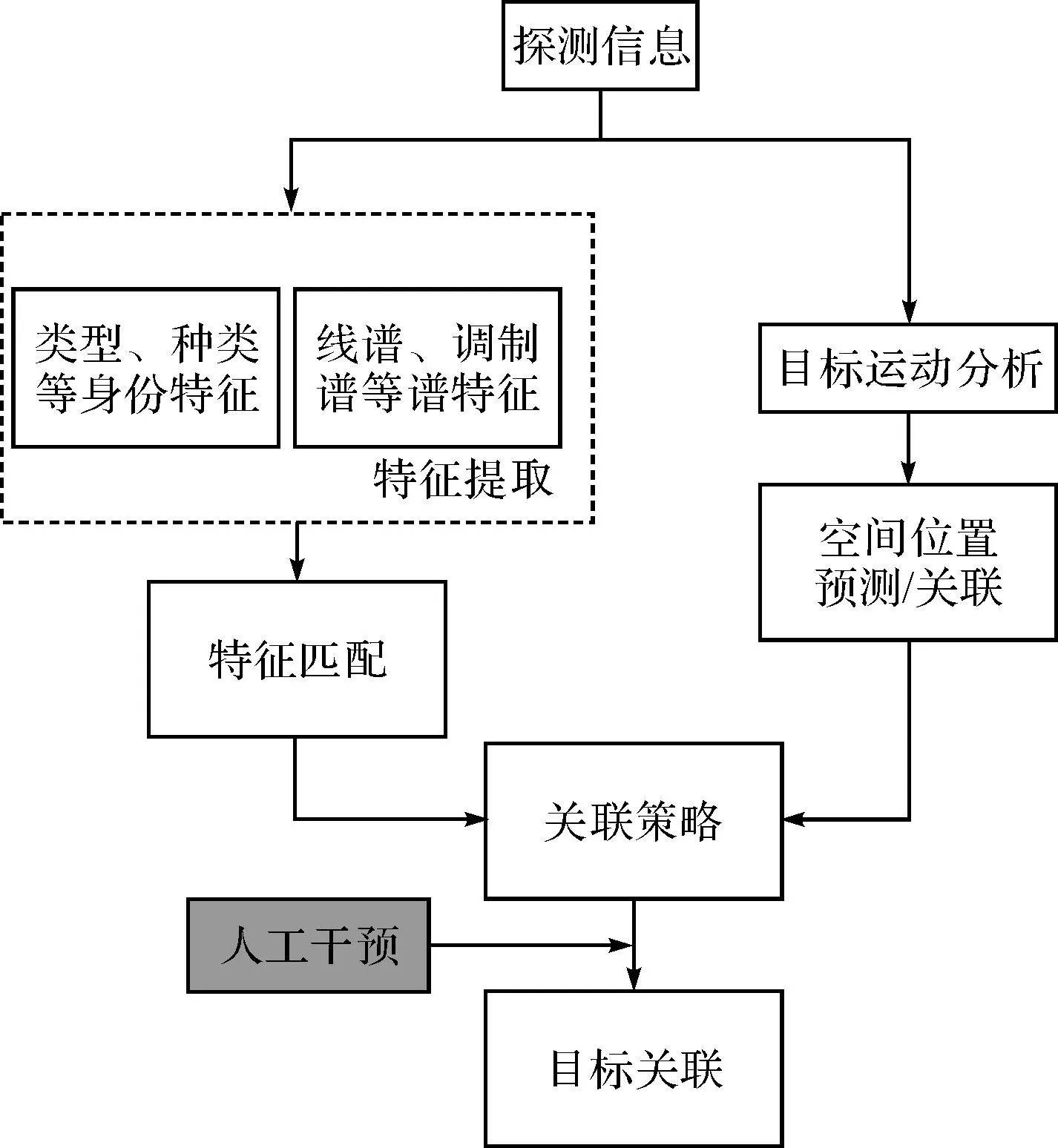
图1 特征辅助关联示意图
3水声目标特征
用于数据关联的目标特征信息需具有以下几个特点:
1) 获取性。这一类目标的特征信息是可以持续提取的;
2) 稳定性。目标的特征信息相对于目标的状态信息是不变的或者是缓变的;
3) 差异性。这一类的目标特征信息对于不同的目标是不一样的。
由于海洋环境的复杂性和水声信号通道的特殊性,要从舰船噪声信号中提取既能反映目标本质特征又能满足水下远距离探测要求的有效特征表示,一直是这一领域的难题。目前可以采用的特征信息主要包括:
1) 目标频率特征:表征了目标接近传感器平台的径向速度。
2) 目标幅度特征:表示了信号的强弱及其变化特性。
3) LOFAR谱特征:从时、频两个角度对信号进行描述,含有重要的舰船目标性质信息。
4) DEMON谱特征:可以获得诸如目标螺旋桨转速、螺旋桨叶片数等不变的舰船物理特性。
5) 混沌特征:船舶辐射噪声信号中存在混沌现象,而且不同类型的信号具有不同的分维特征[10]。
传统的水声特征主要是目标强度、频率、功率谱等,同一类目标之间的特征区分度不强,尤其是在多个相同类型密集目标之间的关联中无法有效支持目标与量测关联,现在随着传感器以及水声处理技术的发展,混沌特征等新的特征信息的出现,使得目标分类特征更加细致,更能表征目标的本质,其特征逐渐趋向个体化表征,可有效提高目标识别程度,并进一步增强关联的正确性,未来技术发展方向是持续不断地研究和提取能刻画个体目标本质的新特征。另外,随着水声传感器探测技术的进步和信号处理水平的提高,可能获得多种有效的特征信息。与单特征相比,多种特征信息可以进一步保证不同目标在某种/某几种特征信息相同/相似的情况仍有区分力,从而提高消除数据关联模糊的能力。因此,综合利用多种特征信息更好地辅助数据关联是今后技术发展的一大趋势。
4位置推算预测方法
通常情况下,水声探测都是被动探测,在一定时间内很难获得准确的目标运动信息,而目标方位信息具有非线性和非平稳的特点,在仅有方位信息情况下的预测比较困难,本文采用灰色系统理论对目标方位序列进行预测。预测算法简述如下:
假定原始序列为X(0)={x(0)(1)x(0)(2)…x(0)(n)},对原始序列进行累加生成序列X(1)={x(1)(1)x(1)(2)…x(1)(n)};对生成序列X(1)进行处理;而后对原始序列进行预测。算法步骤如下:
第一步:分析原始数据序列,剔除异常数据,得到预处理后的数据序列。
第四步:经典GM(1,1)模型处理。
第五步:残差检验。
5水声特征辅助关联方法
概率数据关联算法是最有效、最常用的关联方法之一,其针对所有量测和目标构建了统一的关联概率计算公式。在传统的概率关联算法的基础上推导利用特征信息辅助关联的概率计算。一般情况下,对多目标进行跟踪建模,目标t的状态方程描述为:
xt(k+1)=Ft(k)xt(k)+vt(k)
式中,xt(k)表示目标t在k时刻的状态向量;Ft(k)为系统的状态转移矩阵;vt(k)是过程噪声,假定为零均值高斯白噪声,协方差为Qt(k)。目标t的状态常常可以由直角坐标轴方向上的位置和速度来描述,如:
对于每个采样时间k,传感器得到的有效量测集为
Z(k)={z1(k),z2(k),…,zmk(k)}
其中mk为探测区域内的回波数;Z(k)中包含了目标回波和杂波。则量测的累积集合可表示为
其中目标t的状态量测方程可以描述为
其中Ht(k)为观测矩阵;ωt(k)是零均值高斯白噪声,协方差为Rt(k)。



在上式的基础上,引入特征信息,得到包含特征信息的关联概率。由于目标的特征信息与目标的状态信息假设是独立的或者是弱相关的,根据概率密度函数公式,引入特征信息后的事件θjt的概率密度函数可写为pjt,pjt为量测j与目标t之间的统计距离,可表示为



由多事件的条件贝叶斯公式及联合概率密度关联方法的定义,可得量测j与目标t的关联概率为
对应的状态更新及协方差更新为

根据该公式系就可完成对目标t的单次跟踪滤波。
6仿真分析
搭建仿真系统,仿真四批目标,进行交叉运动,并且在交叉过程中丢失3分钟量测,测试算法的处理性能。算法在运动要素关联和预测的基础上,结合目标水声特征,对出现量测间断情况下的多目标态势进行关联处理。
从图2可以看出,提出的水声特征辅助关联方法对于航迹断续的情况有着较好的关联效果,能实现目标间断量测情况下的有效关联,保持态势生成的一致性。因为特征辅助关联算法的效果与特征提取的准确性、特征与目标匹配的正确性以及各目标特征之间的区分性密切相关,因此在实际应用时,需要针对不同的态势,在计算关联概率的时候设置不同的系数,调节特征信息和运动要素信息在关联中的比重,可以结合特征提取方法进行自适应的调整,以达到更优的效果。
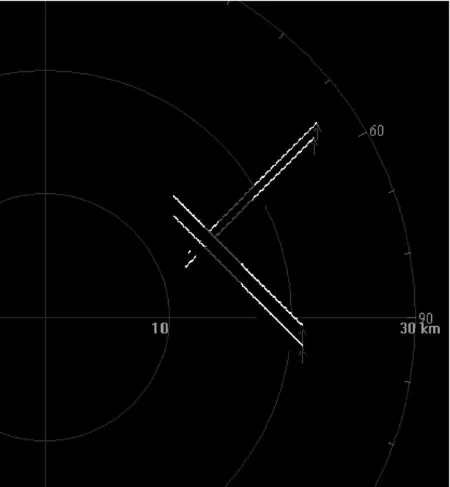
图2 特征辅助关联情况示意图
7结语
本文针对声纳探测特性,分析了可用于目标表征的特征信息,结合位置预测模型,在联合概率关联算法基础上,构建了特征辅助的关联算法,基本实现了利用水声特征辅助进行的多目标关联,提高了关联正确率。其性能和效果取决于特征对于目标表征的准确性、可区分性以及提取过程中的可靠性和稳定性。后续还需在挖掘目标特征信息方面进一步研究,优化辅助关联算法,提高复杂环境下的数据关联能力。
参 考 文 献
[1] Bar-Shalom Y, Kirubarjan T, Gokberk C. Tracking with classification-aided multiframe data association[J]. IEEE Trans. on Aerospace Electronic Systems,2005,41(3):868-878.
[2] Wang J G, Luo J Q, Lv J M. Passive tracking based on dataassociation with information fusion of multi feature and multitarget[C]//M Proc. of International Conference on Neural Networks and Signal Processing,2003:686-689.1999,27(3):136-139.
[3] 占荣辉,张军.特征辅助数据关联研究综述[J].系统工程与电子技术,2011,33(1):35-41.
[4] 赵峰.特征辅助的多目标数据关联算法研究[D].长沙:国防科技大学,2010.
[5] Wang X Z, Muíi cki D, Ellem R, et al. Enhanced multi target tracking with Doppler measurements[C]//M Proc. of Information, Decision and Control,2007:53-58.
[6] Pace D W, Mallick M, Eldredge W. Spectral feature-aided multi target multi sensor passive sonar tracking[C]//M Proc. of Oceans,2003:2120-2126.
[7] Song T L. Most probable data association with distance and amplitude information for target tracking in clutter[C]//Proc. of IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems,2008:360-365.
[8] 郭磊,唐斌,刘刚.基于辐射源信号特征信息的JPDA无源跟踪算法[J].电子科技大学学报,2007,36(1):27-29.
[9] 王杰贵,罗景青.基于多目标多特征信息融合数据关联的无源跟踪方法[J].电子学报,2004,32(6):1013-1016.
[10] 李亚安,徐德民,张效民.基于混沌理论的水下目标信号特征提取研究[J].兵工学报,2002,23(2):279-281.
中图分类号TP301
DOI:10.3969/j.issn.1672-9730.2016.03.037
作者简介:蒲勇,男,硕士,高级工程师,研究方向:指控系统和信息综合处理。
收稿日期:2015年9月12日,修回日期:2015年10月26日