舰炮火控设备虚拟维修训练与考核系统*
2016-04-15傅茂聪陈维义
傅茂聪 陈维义
(海军工程大学兵器工程系 武汉 430033)
舰炮火控设备虚拟维修训练与考核系统*
傅茂聪陈维义
(海军工程大学兵器工程系武汉430033)
摘要为提升海军舰员级火控设备维修训练水平,利用虚拟维修技术手段开发了针对舰炮火控设备的虚拟维修训练与考核系统,设计确定了系统的基本功能以及软件结构,建立了设备的数据模型,应用状态机的方法对系统的主要功能加以实现,并结合具体实例对系统相关功能与界面进行了介绍。
关键词虚拟维修技术; 训练考核系统; 结构功能; 数据模型; 状态机
Virtual Maintenance Training and Assessment System of Warship Cannon Fire Controls Equipment
FU MaocongCHEN Weiyi
(Dept. of Weaponry Engineering, Naval University of Engineering, Wuhan430033)
AbstractTo promote the level of fire controls equipment maintenance training of marine crews, a training and assessment system of the warship cannon fire controls equipment which is to do the virtual operation and maintenance is developed by the means of virtual manufacturing technology. The basic function of the system and the soft-ware structure are designed and determined, so is the data structuring model. The method of state machine carries out the main function of system, the function and the interface are introduced with some concrete examples.
Key Wordsvirtual manufacturing technology, training and assessment system, structure and function, data structuring model, state machine
Class NumberTP391
1引言
随着中国海军现代化进程的不断推进,新型装备呈现出科技含量高、结构复杂、数量有限、价格高昂等特点。传统的、基于实装的维修训练模式会造成大量的零部件消耗,导致装备的严重磨损,影响装备的完好性,严重时还会引起安全事故[1~3]。同时,受到装备数量和维修场地等多种因素的限制,基于实装的维修训练无法大规模、常态化地开展,导致装备的直接操作者对于简单故障的实际修理能力较弱[4]。
近年来,虚拟现实技术快速发展,人们将其引入了装备维修领域,提出了虚拟维修的概念。虚拟维修是实际维修过程在计算机上的本质实现,它以信息技术、仿真技术、虚拟现实技术为支撑,通过协同工作的模式,实现产品维修性的设计分析、维修过程的规划与验证、维修操作训练与维修支持等产品维修的本质过程。其中,通过对维修训练过程仿真,在支持维修训练与维修的实施方面可以有效降低维修训练费用,提高维修的准确性与效率[5~6]。虚拟维修训练系统是用来支持实现虚拟维修训练的软硬件系统,为受训人员提供仿真操作和维修的环境。以便在装备维修训练时获取最佳的费效比和快速提高维修人员的维修知识和技能[7]。
舰炮火控设备作为火控系统的重要组成,主要完成信号和数据处理、辅助作战指挥、武器控制、操控跟踪器等基本任务。为有效提高舰员对舰炮火控设备操作及维修能力,同时配合并丰富海军水面舰艇舰员维修技能竞赛的比赛科目,针对组成舰炮火控设备的火控台、接口机柜、配电箱、输入输出机柜等进行了虚拟仿真开发,以辅助舰员对舰炮火控设备进行操作和维修,增强舰员的火控设备操作熟练度,提高火控设备维修能力,并最终为相关火控设备虚拟训练和维修平台的开发探索合适方法。
2系统功能与结构
2.1系统功能
随着虚拟维修技术的不断发展,其在军事装备领域的应用越来越多,但是目前大部分虚拟维修系统都是基于视景仿真、三维建模、碰撞检测等技术,以具体实装的机械零部件拆装过程为仿真对象进行搭建的。
本系统最大的特点是用软件的方法达到对硬件电子设备的模拟,通过系统后台数据和界面显示数据的分离,实现了将“虚拟训练”与“虚拟维修”两大功能在同一个硬件平台上的结合,以及操作训练和维修训练两大过程的统一,最终达到在操作过程中发现故障、修理故障的目的,在提高舰员操作熟练度的同时提升对于突发状况的处理能力。同时设备数据、故障设置可以通过编辑器随时进行扩展和添加,为系统后期各项功能的不断完善创造了条件。
系统的实现原理如图1所示。

图1 系统原理图
操作训练时,学员通过轨迹球、键盘、操作杆、触摸屏等与实装相同的人机交互设备进行操作,设备根据操作产生的逻辑数据确定设备的操作响应,完成后台运行数据修改,使系统状态发生跃迁。同时实时刷新设备状态显示界面,实现对用户操作响应结果的显示。通过不同参数的装定实现在不同环境、不同目标类型条件下对舰炮火控设备基本操作流程的模拟训练,使学员尽快熟悉相关操作流程。
维修训练时,教员通过设备故障数据编辑器生成故障数据,包括故障触发时机、故障触发条件、故障类型等内容。当学员对指定维修科目进行训练时,系统加载故障数据,用户操作满足故障触发条件时,系统将根据故障数据对设备的实时动态数据进行修改,显示故障现象。学员根据故障现象,在设备维修界面操作检查、测量等虚拟维修工具,确定故障位置并利用相应的虚拟工具对故障部件、面板进行更换。通过这种方法既可以实现对某一维修训练科目的练习,也可以完成对正常操作过程中突发故障的修理与排除,达到贴近现实,提升训练效果的目的。
2.2体系结构
本系统采用基于客户端/服务器(C/S)模式的三层分布式体系结构,将整个系统分成表示层、应用逻辑层和数据层三部分。系统具有逻辑相对独立,有较高的可维护性、可扩展性、可升级性以及安全性等特点[8~9]。另外还有交互性强,在出错提示、在线帮助等方面有较强功能等优势。
本系统具体分为虚拟训练教员台和虚拟训练学员台两个子系统,分别对应了结构中的服务端与客户端。其结构如图2所示。
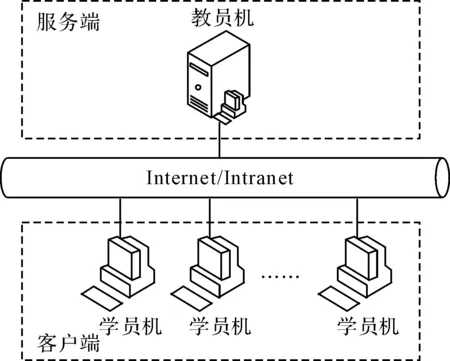
图2 系统体系结构图
依据体系结构将系统具体层次结构分为表示层、应用逻辑层和数据层,如图3所示。
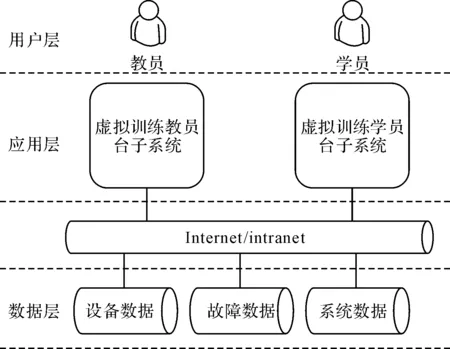
图3 系统层次结构图
教员台子系统面向的用户主要为教员和管理员,用于在训练和考核过程中相关设备数据的管理以及对学员考核成绩的管理,功能结构及相应的子功能如图4所示。

图4 教员台功能结构
学员台子系统面向的用户主要为学员,用于学员对设备仿真操作、维修训练和考核。功能结构如图5所示。两个子系统通过局域网与数据层实现数据交换。

图5 学员台功能结构
学员台中的操作维修训练模块包括操作训练和维修训练。训练模块主要用于学员对设备操作的自我练习。操作训练主要是用户通过虚拟设备操作界面进行操作并观察设备的操作响应,让学员熟悉系统设备的正常操作流程;维修训练主要用于学员对设备在故障条件下,根据操作的响应诊断故障的类型、位置,并完成维修过程。
操作维修考核模块包括操作考核和维修考核。考核过程中,用户操作方式及系统响应与训练模块基本相同,系统还将记录初始环境和用户所有的操作及相关参数,并以二进制格式存储到文件中。教员可以通过该文件查看学员的每一个操作步骤,以完成相应的考核评价。
3关键技术
3.1基于状态机思想的操作逻辑描述
本系统功能实现的逻辑思路是人员在对虚拟设备进行操作时,每操作一步系统都会根据当前状态、前置状态等约束条件决定系统将跃迁至的下一状态,再通过屏幕反馈给操作人员。而基于状态机模型的方法是解决软件中状态划分、状态迁移等问题的有效途径。
状态机也称为有限状态自动机(finite state machine,FSM),是具有离散输入和输出的一种数学模型。系统可以处于任意有限个状态,系统的状态概括了关于过去输入的信息,而这些信息是确定系统以后行为所必需的[10]。
传统的有限状态自动机(FSM)一般用一个五元组FSM=(Q,Σ,δ,q0,F)进行表示,其中Q为一个有限的状态集合,Σ为一个有限输入字母表,q0在Q中为初始状态,F⊆Q是终结状态集合,δ是转移函数,将Q×Σ映射到Q,即对于每个状态q和输入符号a,δ(q,a)是q将转移至的下一状态。这类状态机多应用于语言识别和语法分析等问题[11]。
本系统将状态机的思想与面向对象的程序设计方法相结合,通过对各模拟面板上不同控件的操作,触发相应的事件和方法,进入或退出状态,并执行相应的响应信息。从而使状态机的思想更好地适应软件开发的过程。
本系统中关于状态机模型的具体实现方法如下:将系统状态集合中的不同状态以ID号的形式进行索引,以便于状态机对于不同状态的快速识别,提高其响应速度。对系统的每一步操作都相当于向系统输入ID,指示将要进入的状态,系统依据前置状态信息、故障信息等内容进行判定是否执行相应的状态响应或故障响应。
现以火控设备的解题过程为例,结合状态机思想的应用对系统加以说明。图6中,为该过程涉及到的状态名称和ID编号,以及相互之间的状态转移关系和条件。

图6 火控设备解题过程状态转移图
其中,图中的各状态响应及状态转移条件如表1所示。
以上状态的退出响应均为将进入状态时修改的参数值直接设置为初始值。
另外,在应用状态机思想接进行相关开发过程中,还有一个环节十分重要,即进入或退出状态的实现方法。
如图7~图8所示,为进入和退出状态方法流程图。

表1 各状态响应及转移条件

图7 进入状态方法流程图

图8 退出状态方法流程图
与进入状态时一样,退出状态时,也主要经历状态检测、故障信息检测、触发准备退出状态事件等步骤,其不同点在于,当处于故障触发状态时,根据故障触发时机的不同,故障现象退出响应的触发时机也会发生变化。最后,每进入和退出一个状态后,对其相应的后置状态进行数据更新,确定下一步操作可能到达的状态。
以上为应用状态机模型实现系统功能的核心环节即:状态进入、状态退出、后置状态的更新以及状态信息和故障信息的检测等内容。通过上述方法实现了当系统接受并识别到不同的输入信息时,系统依据相应的约束条件进行状态的跃迁,并表现出不同的响应,操作人员则根据操作反馈,继续后续的操作和维修训练。
3.2设备数据模型的建立
本训练模拟系统采用的是用软件的方法对于实际硬件功能、逻辑包括故障信息进行模拟,需要使用不同功能、类型的数据对系统进行组织与管理,对系统的数据层建立设备的数据模型,更好地完成对设备的模拟与仿真。
将运行于系统中的相关数据组织分为三大部分,即:设备数据、逻辑数据和运行数据。
设备数据包含两部分内容:设备的资料数据主要为课件、音视频以及部分部件的说明信息和相关操作的提示信息;硬件结构数据主要为设备的结构树模型,其中以具体型号的设备为根节点,自顶而下各层依次为机柜信息、面板信息、部件信息和引脚信息。结构数据信息主要体现于与用户进行交互的界面层中,各结构主要以图片为表现形式,另外包括相应的名称、文字说明、字符串编码等内容。对于可以与用户进行交互的部分,则直接在图片相应位置用C#中自定义控件的方法添加控件,以完成对于用户操作的响应。
逻辑数据中则主要涉及状态机的相关应用,首先将系统操作或维修过程中的各个环节划分为相应的状态,确定不同状态之间转移的逻辑关系和转移条件,并根据实际情况设定各状态的操作响应,通过响应参数的设定,对相应控件的属性进行修改,以完成对不同操作的仿真。故障状态数据还包括了故障类型、触发时机、故障响应等信息,用于维修训练过程中的故障显示。
运行数据主要包括系统在运行过程中产生的数据,指修改界面显示和运行于后台的相关数据,主要以各种类型的数据变量为主。系统在运行过程中主要存在两个线程,当用户进行了某项操作后,其中一个线程用于将操作响应数据读取并存放入一个任务列表之中,而另一个线程则不断读取任务列表中的数据,对界面做不断地修改。同时应用数据锁技术以防止两个线程在读写过程中相互冲突。
4应用实例
基于以上结构功能以及关键技术,搭建完成了某型舰炮火控设备虚拟维修训练与考核系统。
图9所示为学员台上系统的模式选择界面。

图9 模式选择界面
图10为系统的主界面,由五个屏幕进行分别显示,其中设备状态显示界面和设备操作界面根据设备的不同而显示不同的内容。设备状态显示界面主要用于显示设备的操作响应和状态显示,如果有可操作部件,通过鼠标点击可以实现交互。设备操作界面为触摸屏,主要包括虚拟的操作按钮、开关等操作部件,通过触摸操作可以实现交互。设备操作界面旁还有手柄和摸球,手柄操作和实装相同,摸球和鼠标操作相同。设备的状态显示以及进行人机交互的输入设备与实际装备完全一样。维修操作界面以列表的形式显示不同的火控设备机柜,用于对设备结构观察、选择和操作,也可以对故障部件进行测量、更换等维修操作。综合显示界面则主要显示了训练或考核的相关信息、操作计时、设备信息等内容。
在对设备进行虚拟操作时,如果操作部件处于设备状态显示界面或设备操作界面,则在相应界面中直接操作,此时对在维修操作界面中对应的操作部件操作无效,如果操作部件不处于设备状态显示界面,则需要在维修操作界面中进行操作。

图10 系统界面显示

图11 维修训练模式示意图
5结语
本系统利用虚拟仿真技术,采用先进的软件总体技术,利用状态机模型思想对系统逻辑进行组织,建立了系统虚拟设备的数据模型,实现了舰炮火控设备的操作使用训练和维修训练的一体化,能够在操作使用中发现故障、排除故障,最大程度贴近装备实际。本系统的开发是在基于实际装备的基础之上,对部分功能(考核评价、教学提示等)进行扩展和提升,为有效降低训练成本、提高训练效益、降低训练的安全风险、更好地开展装备操作维修技能训练探索新的途径。
参 考 文 献
[1] 王强,宋建社,曹继平,等.复杂装备虚拟维修训练技术[J].兵工自动化,2009,28(12):1-3.
[2] 洪津,张万军,谢庆华,等.虚拟维修训练系统发展综述及其关键技术探讨[J].解放军理工大学学报,2000,1(1):63-67.
[3] 李星新,郝建平,叶飞,等.虚拟维修训练的基本问题与技术体系研究[J].微计算机信息(测控自动化),2010,26(6-1):30-32.
[4] 杨晓文,韩燮.虚拟维修训练系统关键技术研究与应用[J].计算机应用与软件2013,30(5):208-210.
[5] 郝建平.虚拟维修仿真理论与技术[M].北京:国防工业出版社,2008:19-20.
[6] 刘佳,刘毅.虚拟维修技术发展综述[J].计算机辅助设计与图形学学报,2009,21(11):1519-1533.
[7] 谭继帅.虚拟维修训练系统的交互设计研究[D].石家庄:军械工程学院,2007:8-13.
[8] 郑人杰,马素霞,殷人昆.软件工程概论[M].北京:机械工业出版社,2009:81-95.
[9] 石弋可,田康生,金宏斌.基于B/S模式的装备虚拟维修训练与考核系统设计[J].信息技术,2010,3:76-79.
[10] J.E.霍普克罗夫特,J.D.厄尔曼.自动机理论、语言和计算导引[M].北京:科学出版社,1986:28-35.
[11] 谭同超.有限状态机及其应用[D].广州:华南理工大学,2013.
中图分类号TP391
DOI:10.3969/j.issn.1672-9730.2016.03.024
作者简介:傅茂聪,男,硕士研究生,研究方向:武器系统运用与保障工程。陈维义,男,教授,博士生导师,研究方向:武器系统仿真与实验技术,武器系统总体与核心子系统设计,军用光电技术。
收稿日期:2015年9月7日,修回日期:2015年10月21日