基于MEMS和WSN的室内定位系统的研究*
2016-04-15吴宇
吴 宇
(海军驻上海地区通信军事代表室 上海 200333)
基于MEMS和WSN的室内定位系统的研究*
吴宇
(海军驻上海地区通信军事代表室上海200333)
摘要随着城市化进程的快速推进,室内定位的应用前景广阔,尤其在一些特定场合的实时性和必要性已经日趋显著,其研究意义非常大。通过对现有室内定位技术的比较,提出了基于MEMS和WSN技术相融合的应急室内定位系统方案,从系统架构、硬件实现、软件算法等方面进行阐述。基于MEMS和WSN技术相融合的室内定位系统不依赖于现有的Wi-Fi系统,能够在突发事件发生后快速架设、硬件通用性好、能够通过不断优化软件算法持续提高系统性能,是未来室内应急定位的一种有效手段。
关键词MEMS; WSN; 室内定位
Indoor Positioning System Based on MEMS and WSN
WU Yu
(Navy Representative Office of Communications in Shanghai, Shanghai200333)
AbstractWith the rapid progress of urbanization, the indoor positioning technology has a brilliant prospect in application. In particular, the real time and necessity of some particular scenes have become more and more significant. Based on the comparison of existing indoor positioning technology, this paper puts forward the indoor positioning system operation based on MEMS and WSN. This paper elaborates on the system architecture, hardware implementation, and software algorithm and so on. This system which is based on MEMS and WSN doesn’t rely on the Wi-Fi system. This system can set up quickly after the incident, and it can improve the system performance by optimizing the software algorithm. This operation will be an effective method for the indoor positioning technology in the future.
Key WordsMEMS, WSN, indoor positioning
Class NumberTP393
1引言
随着经济的高速发展,城市规模不断扩大,高楼大厦林立,给人们带来了现代生活的便利,同时也提出了新的安全课题:如何针对结构布局复杂楼宇,实现室内人员的快速定位,特别是发生紧急情况时快速找到室内的被困人员尤其重要。
针对这些需求室内定位技术应运而生,随着技术的不断完善,市场拓展空间越来越大,应用范围也将越来越广泛,尤其是在复杂环境下,如图书馆、体育馆、地下车库、货品仓库等对人员以及物品的快速定位需求更为迫切。目前常用的室内定位技术主要有以下几种: 1) 基于超声波定位技术; 2) 基于红外线的定位技术; 3) 基于超宽带的定位技术: 4) 射频识别定位技术(WLAN、Zigbee)等。但是上述的室内定位系统或多或少存在跟踪设备复杂、易受环境影响、后台处理能力要求高、设备通用性差等缺陷,而且这些室内定位系统主要是针对固定场所正常情况下的定位与导航,需要提前预装,对于临时应急救灾的应用场合就无能为力了,其不能完全适用于室内救灾情况。
因此,本文就针对一些特殊的需求,融合MEMS和WSN技术设计出应急救灾的室内救灾定位系统。
2基于MEMS和WSN技术的室内定位系统的系统框架设计
目前,在室内定位的诸多系统中,主要采用的是Wi-Fi的方式来进行定位的,而随着微机电系统(MEMS)和Zigbee的快速发展,运用MEMS惯性传感器和Zigbee节点进行定位已然成为了一种可能,而且,将两者技术进行融合定位,不仅能够提升定位的精度,同时,也为室内定位提出了一种新的解决方案。本文的主要思路就是借助于MEMS惯性传感器与WSN来实现两者的联合定位,其中MEMS实现精确定位,WSN则在数据传输的基础功能之外辅助MEMS传感器实现移动目标位置的定时校准。
根据上述思想,本文提出的基于MEMS和WSN技术的室内定位系统的整体设计框架有外部客户端及相关的外部网络、MEMS惯性传感器定位以及WSN联合定位设备等部分组成,系统组成框图如图1所示。

图1 系统框架图
1) Zigbee节点:在本方案中,Zigbee节点可以分为两种:终端Zigbee节点和汇聚Zigbee节点。
终端Zigbee节点不仅能与便携式MEMS定位设备进行通信,而且这些节点之间还可以进行自组网,进行数据的通信,当这些节点组网后,信标节点之间的信息实现了共享,那么就可以通过某种机制来实现更优化的定位算法;汇聚Zigbee节点在本框架中主要负责从终端Zigbee节点传送过来的数据进行融合、转发给客户端以及负责把客户端处理好的数据发送给终端Zigbee节点。
在本系统中,由于特定的需求,终端Zigbee节点和汇聚Zigbee节点的通信半径是不同的,一般地,汇聚Zigbee节点的通信半径能够覆盖整个室内,而终端Zigbee节点的通信半径则相对小很多。
2) 便携式MEMS定位设备:该设备会通过自身携带的MEMS惯性传感器进行实时的定位,同时,其还将会通过Zigbee协议与WSN中的Zigbee节点进行数据通信,以及通过GPRS/3G协议负责与外部客户端进行数据的传送。
3) 客户端:外部客户端主要负责数据的分析、处理和反馈。
3硬件设计
3.1便携式MEMS定位设备
在本方案中,便携式MEMS定位设备的功能主要有:
1) 在MEMS器件中,预先嵌入相关的定位算法,这样消防员就可以通过MEMS模块来获取到自身的位置和行驶的里程数;
2) 该模块要能够实现与节点之间的数据通信,WSN中的节点要能够将其自身的节点信息传输给便携式MEMS定位装置;
根据便携式MEMS定位设备的功能需求,在本方案的硬件设计中,便携式MEMS定位设备包含电源模块、MEMS惯性传感器模块、Zigbee模块和ARM处理模块,设备的组成框架图如图2所示。
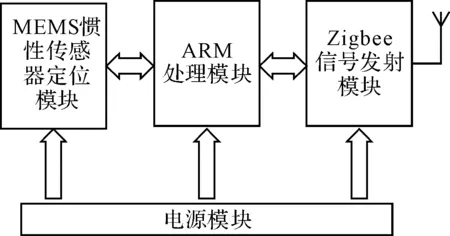
图2 便携式MEMS定位设备框架图
1) 电源模块:实现对设备各个功能模块进行供电,同时考虑低功耗设计。
2) MEMS惯性传感器模块:采用成熟的MEMS惯性传感器芯片,并嵌入能够实现定位以及位移计算功能的算法。
3) Zigbee模块:实现节点坐标信息的点对点的通信,在实施的时候,需要给其配置终端节点的相关参数,从而使得其在系统中完全充当终端节点的作用,这样其就可以根据其自身的功能或者需求进行工作,在本方案中的Zigbee模块的组成与WSN中的Zigbee终端节点是相同的。
4) ARM处理模块:负责便携式MEMS定位设备相关外围模块正常工作的控制系统。
3.2WSN中Zigbee节点
在本方案中,由于WSN是自组网的,Zigbee节点可根据不同的需要分配不同的角色,能够实现如下功能:
1) 要能够发起这些Zigbee节点自动组网;
2) 这些Zigbee节点要能够通过多跳将相关的数据包传送给自身通信范围外的其他节点;
3) 其中充当汇聚节点的Zigbee节点要能够通过GPRS/3G协议实现与外部客户端进行通信;
4) 充当汇聚节点的Zigbee节点要能够将从外部客户端接收到的坐标信息通过语音的形式将其广播出来;
5) 充当汇聚节点的Zigbee节点要留有功能拓展接口,以方便其他功能模块的接入与实施。
根据Zigbee协议可知,在使用Zigbee节点来组建WSN时,这些节点分为三种角色:协调器、路由器和终端节点。
协调器是网络的第一个开始的设备,协调器节点选择一个信道和网络标志符(也叫PAN ID),然后开始建立一个网络。协调器设备在网络中可以使用,比如建立安全机制、网络中的绑定的建立等等。
路由器实现多跳路由、允许合法设备加入网络、并辅助子节点完成通信。
终端节点实现基础数据的采集等相关的功能,一般直接使用电池供电即可。
在本方案中,将WSN的网络模型设计为网状结构,这样可以增强自组织网络的深度和复杂度,以实现更大的数据共享。按照上述的三种角色对WSN中的Zigbee节点进行划分,首先,由于在该网络中,这些节点并不需要采集周围环境的相关信息,该网络的重点是要实现数据包的相互传输,因此,在设计这些节点的角色时,本方案就抛弃了终端节点,这样网络中只存在协调器和路由器。基于Zigbee的WSN的网络模型图如图3所示。
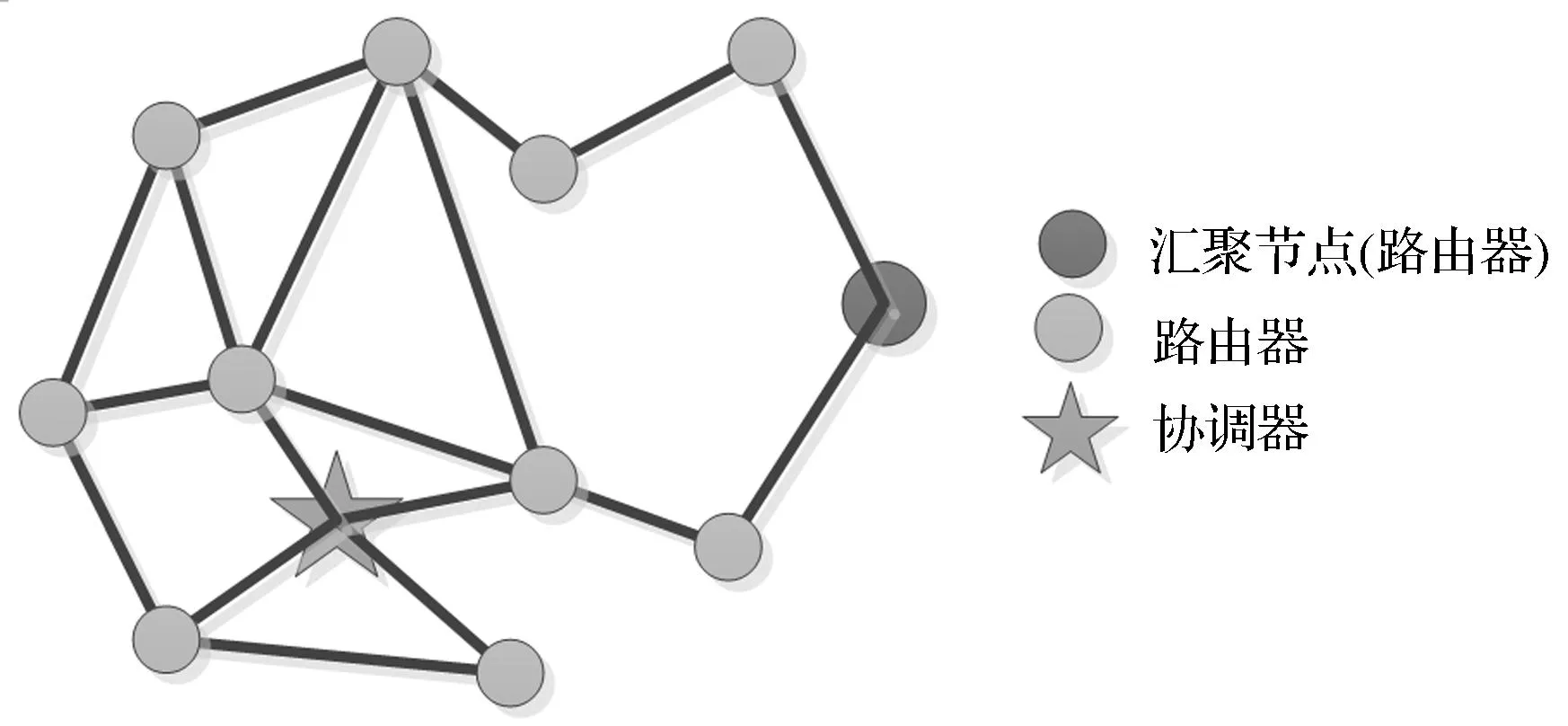
图3 基于Zigbee的WSN网络模型图
在本系统中,通过给室内的入口处的Zigbee节点配置协调器的相关参数,这样就使得网络中产生了一个能够发起组网的协调器,使得网络中其他的节点都能够加入到该自组织网络中,在本方案中,其他的节点都配置路由器的相关参数,使得这些节点都能够在网络中自由地接收和转发数据包。由于这些节点没有其他的特殊功能要求,因此,这些协调器和路由器的硬件框架图和方案一中的WSN中Zigbee节点的硬件组成框架图一样。
此外,网络中存在一个汇聚节点,当然该汇聚节点也是配置为路由器,使得其能够接收和转发数据包,除此之外,该汇聚节点还将具备以下模块:
1) GPRS/3G通信协议接口模块:由于在本地定位系统中,便携式MEMS定位设备没有与外部客户端进行通信,因此,汇聚节点需要有GPRS/3G的无线通信协议,以便将本地的测量的数据发送给外部客户端进行处理,同时,也能够通过该接口将外部的处理结果接收回来;将从外部客户端获取到的坐标信息广播给所有的消防员,以方便消防员之间的协作执行任务;
2) 坐标信息接收模块:为了便于节点用户之间的协作,对于外部客户端发送回来的坐标信息,在该汇聚节点上要能够以语音的方式获得到坐标的信息;
3) 其他的功能扩展模块,在实际的处理消防任务过程中,可能还需要一些其他方面的需求,诸如:室内的烟雾浓度采集、室内视频的采集、行驶的路线采集等;
4) ARM处理模块,该处理模块必须负责外围模块正常工作的控制系统,一般地,ARM处理模块可以采用ARM9处理器来构建该模块。
如图4所示,为汇聚节点的硬件组成框架图。
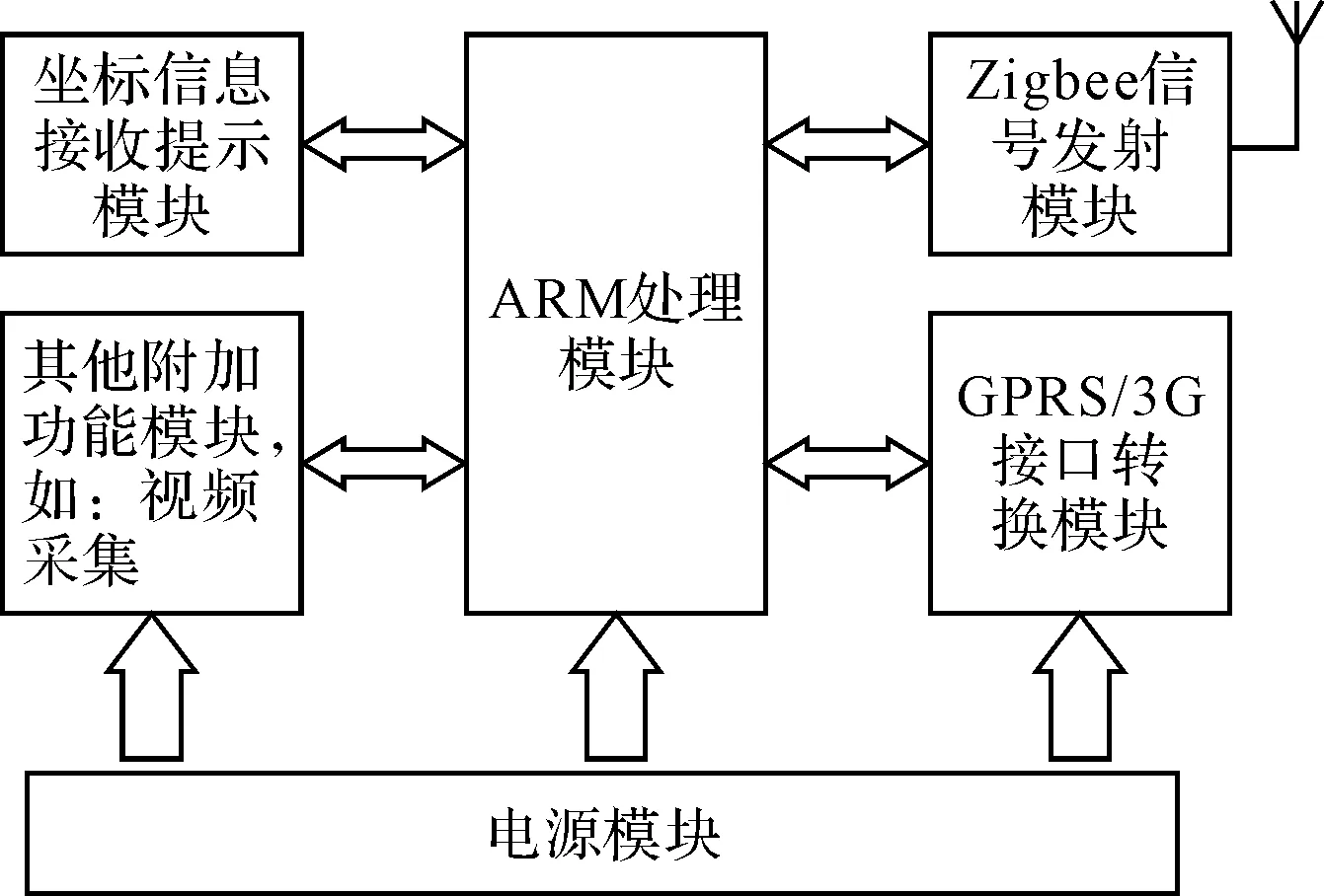
图4 汇聚节点硬件组成框架图
4算法设计
系统实现主要包含两类算法,MEMS模块的嵌入式定位算法和系统的定位机制算法。
4.1MEMS模块的嵌入式定位算法
惯性导航(Inertial Navigation)是依据牛顿惯性原理,利用惯性元件(陀螺仪和加速度计)来测量运载体本身的加速度,经过积分和运算得到速度和位置,从而达到对运载体导航定位的目的。惯性导航的优势在于给定了初始条件后,不需要外部参照就可确定当前位置、方向及速度。其精度和性能很大程度取决于传感器精度,传感器的小误差会随时间累积成大误差。高精度、高带宽和快速响应姿态求解算法,静态误差小于1°。陀螺仪零漂去除算法,使得姿态不随温度等环境漂移。本文采用自适应滤波器动态消除加速度计和陀螺噪声,采用动态子校准方法消除软磁和硬磁的影响,保证姿态和方向计算精度。传感器数据融合算法采用基于四元数的扩张卡尔曼算法进行数据融合,互补不同传感器优劣势,如图5结构所示。
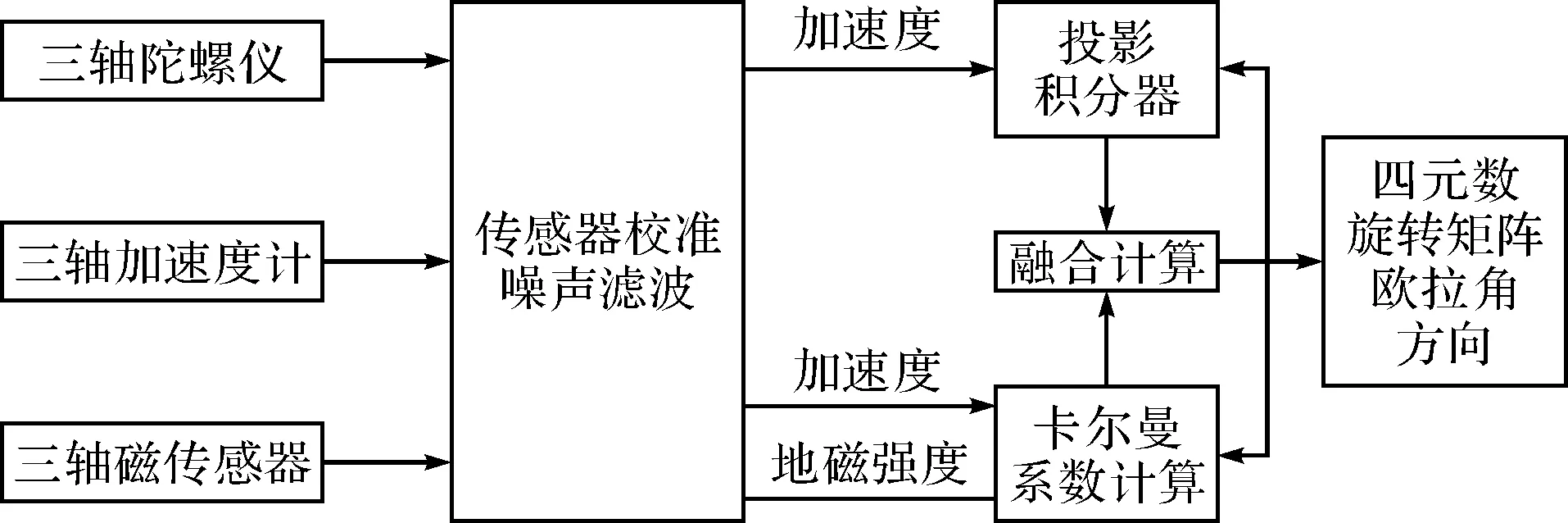
图5 传感器数据融合算法结构图
融合算法支持输出欧拉角、旋转矩阵和四元数。欧拉角到旋转矩阵的转换的公式:

旋转矩阵到欧拉角的转换公式:
四元数到旋转矩阵的转换公式:
4.2系统定位机制算法
本文的算法具有一个基本的模型,如图6所示,在该定位模型下,所有的Zigbee节点的坐标信息都是一致的,也就是说,这些传感器节点实际上充当的是锚节点的角色。
这个模型可以做出如下解释:
步骤一:部署Zigcbee节点;
步骤二:操作人员携带MEMS定位装置,并开启MEMS定位装置,开始定位;
步骤三:操作人员进入室内,并与入口处的Zigbee形成之间通信,此时就将此节点处的坐标信息传输给MEMS系统,并进行初始化;
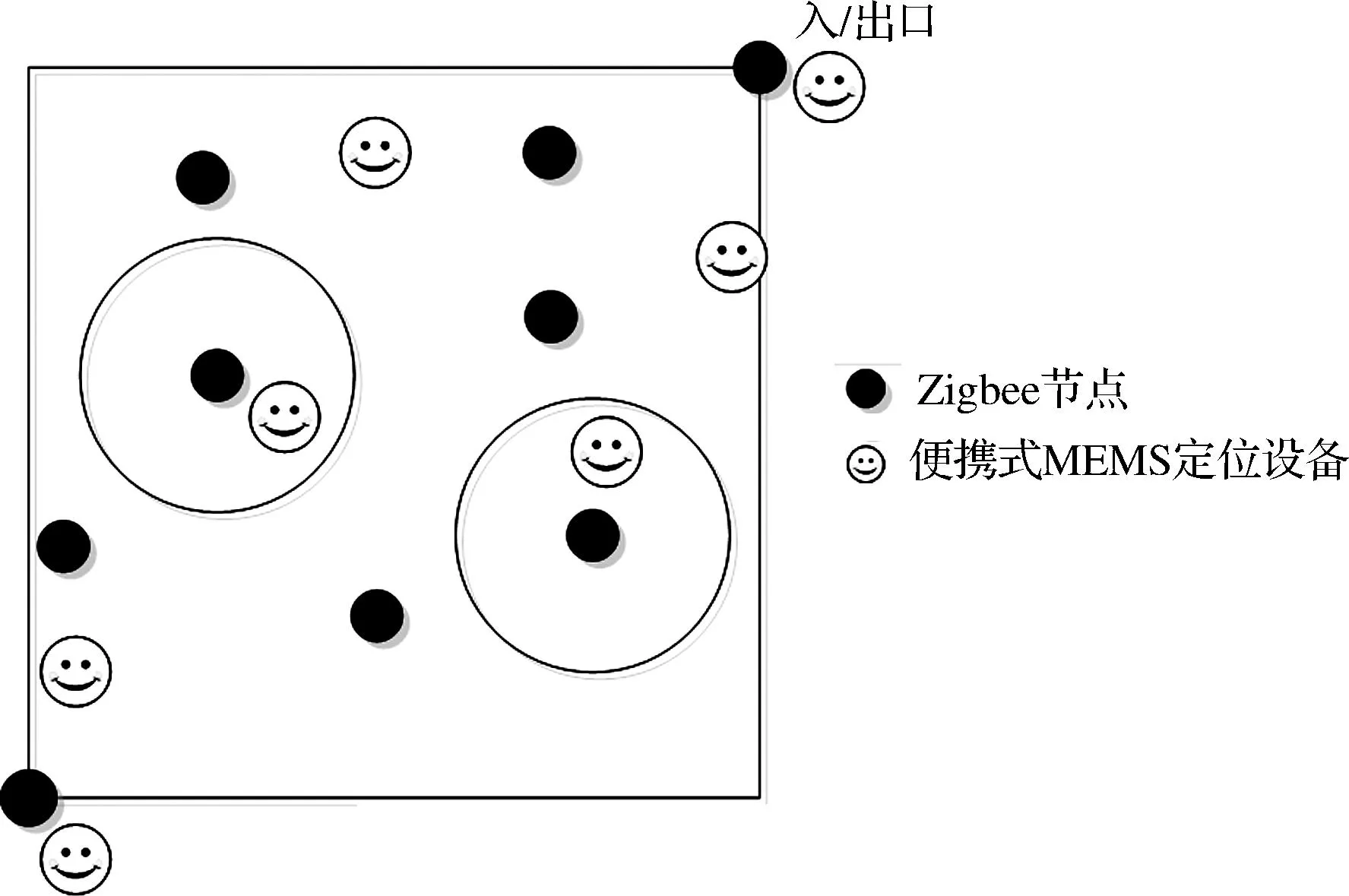
图6 算法的基本模型图
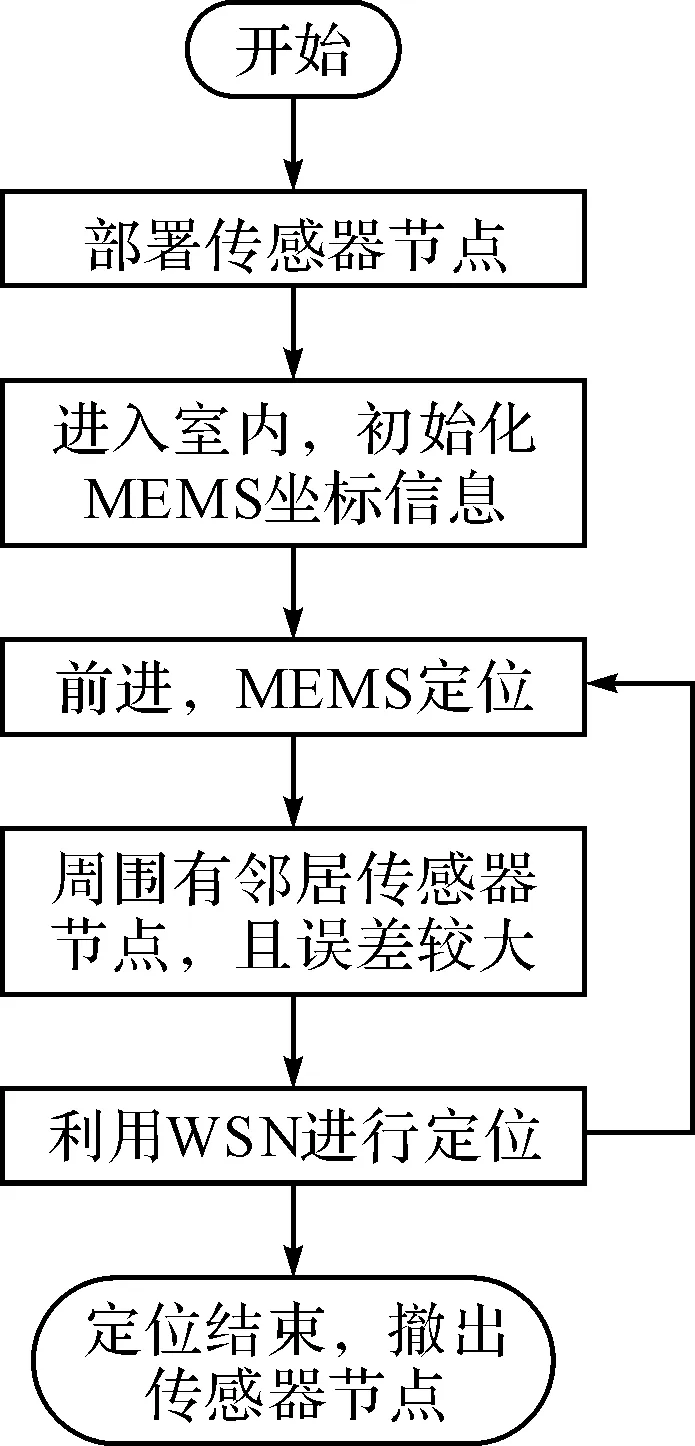
图7 算法整体流程图
步骤四:消防员继续前进,如若在前进的过程中,能够与已部署在室内的传感器节点构成直接通信系统,若此时,因为MEMS定位出来的误差比较大,则此时运用WSN进行辅助定位,如此往复循环;
步骤五:操作人员处于出口处,则整个救援工作结束,定位也就结束,关闭定位装置,同时,撤出所有的Zigbee节点。
根据本系统的整体设计思路,其算法的整体流程如图7所示。同时系统根据基于WSN节点独立式和WSN节点自组网这两种情况,分别设计出了相应的算法。
5结语
本文针对没有WIFI等无线环境的应急场合下,需要进行室内定位的实际需求出发,提出采用MEMS和WSN技术相融合的室内定位系统方案,系统由通用成熟硬件模块组成,通过不断优化软件和算法提升系统性能。根据MEMS和WSN的特点设计的室内定位系统,不依赖于现有的WiFi网络,架设时也不需要事先进行大量的测量,适合临时应急任务时的快速架设。无线定标、MEMS精调能够规避单一手段引起的位置积累误差和干扰影响,大大提高系统定位精度,而自组网方式的数据传输系统架构,能够有效提高系统的抗毁性。
参 考 文 献
[1] 罗屹洁.第三代短波通信技术及其发展趋势[J].电信快报,2011(1):30-32.
[2] 吕良,邓中亮,刘玉德,等.基于MEMS技术的汽车传感器研究进展[J].电工技术学报,2007(4):21-23.
[3] 李金凤,王庆辉,刘晓梅,等.基于MEMS惯性器件的行人室内定位系统[J].计算机测量与控制,2014(11):33-35.
[4] 黄洪加.基于惯性传感器的室内惯性导航与定位系统[J].单片机与嵌入式系统应用,2015(2):25-27.
[5] 孙凤,施伟斌,黄灵凤.基于无线传感器网络的室内定位技术的研究[J].电子技术应用,2013(10):38-40.
[6] 王琦.基于SSI测距的室内定位技术[J].电子科技,2012(6):17-19.
[7] 马帅.基于Zigbee的WSN室内定位技术研究[D].合肥:安徽大学,2012.
[8] 于波.基于Zigbee的WSN定位技术的研究[D].长春:长春理工大学,2014.
[9] 贺茂平.基于Zigbee网络室内定位系统设计与实现[D].武汉:武汉理工大学,2012.
[10] 李万昌.基于Zigbee的WSN定位技术研究[D].太原:太原理工大学,2011.
[11] 陈庆章,毛科技,何文秀,等.基于共面度和分层结构的WSN三维定位算法[J].电子测量与仪器学报,2012(8):43-45.
[12] 姜立娣.基于WSN定位技术的研究与实现[D].上海:华东师范大学,2007.
中图分类号TP393
DOI:10.3969/j.issn.1672-9730.2016.03.014
作者简介:吴宇,男,工程师,研究方向:无线通信。
收稿日期:2015年9月1日,修回日期:2015年10月16日
