基于VisVAP的过饱和交叉口群自适应控制评价
2016-04-14赵亚东吴其龙
赵亚东,吴其龙
(上海理工大学 管理学院,上海 200093)
基于VisVAP的过饱和交叉口群自适应控制评价
赵亚东,吴其龙
(上海理工大学 管理学院,上海200093)
摘要为了提高交叉口群的运行效率,以改进的TACOS模型为基础,提出了适应过饱和状态下交通流动态变化的自适应控制策略。该方法以交叉口的关键路径通过最大车辆和平均排队长度最小为目标,实时优化相位放行方案,并根据最大排队长度的车流方向放行绿灯进行实时控制。利用Vissim中VisVAP模块对过饱和交叉口群自适应控制策略进行多项指标评价分析,并与定时控制相比较。结果表明,该控制方法可有效降低车辆平均等待时间和车均延误,提高通行能力。
关键词交叉口群;自适应控制;相位切换;VisVAP;仿真评价
Evaluation of Oversaturated Intersection Group Adaptive Control Based on VisVAP Simulation
ZHAO Yadong,WU Qilong
(Business School,University of Shanghai for Science and Technology,Shanghai 200093,China)
AbstractAn adaptive control strategy based on the improved TACOS model for the supersaturated state of traffic flow dynamic change is proposed to improve the efficiency of intersection group of adaptive control intersection.This method offers real-time optimization phase release plan with the intersection of the critical path through the vehicle maximum and average queue length minimum as the goal and release the green light for real-time control according to the flow direction of the maximum queue length.The Vissim VisVAP module is employed for multiple index evaluation analysis of intersection group of adaptive control strategy,which is compared with the timing control.Results show that the adaptive control method can effectively improve traffic capacity by reducing the average waiting time and delay of motor vehicles.
Keywordsintersection group;adaptive control;phase-switching;VisVAP;simulation and evaluation
交叉口群[1]是地位位置相邻,具有强关联性的各交叉口之间相互影响制约的一个系统。目前在过饱和状态交叉口控制方面由于优化目标并不成熟,延误、饱和度等参数无法直接测量,交叉口又经常出现排队溢出等状况,所以无法按照稳态流的方法进行控制。针对过饱和状况下的交叉口群控制,高云峰等提出了交叉口微观交通状态的概念,将交叉口进口道分为3种状态并分别建立相对应的交通控制评价指标的实时计算模型[2]。徐洪峰等针对环形交叉口提出了一种所有进口道实时交通信号控制策略,融合让行规则控制和交通信号控制的技术优势,及时判断并消除环道“锁死”的可能性[3]。林晓辉利用Vissim进行建模比较实施全感应控制与定时控制,发现在高峰时段,延误、行程时间、排队长度均有所提高[4]。雷磊等建立了过饱和交叉口群系统优化数学建模,提出了优化模型的求解模型以达到全局最优化[5]。过饱和状态下交通控制优化的本质是通过调整绿灯时间,减少关键交叉口的排队长度,消除滞留排队防止排队溢出[6]。因此本文针对过饱和状态下交叉口群的交通控制优化,选取关键路径通过最大车辆和平均排队长度最小为目标,通过优化相位放行方案,快速确定最优相位并切换至最大排队长度的车流方向放行绿灯进行适时控制。
1改进TACOS模型的自适应控制
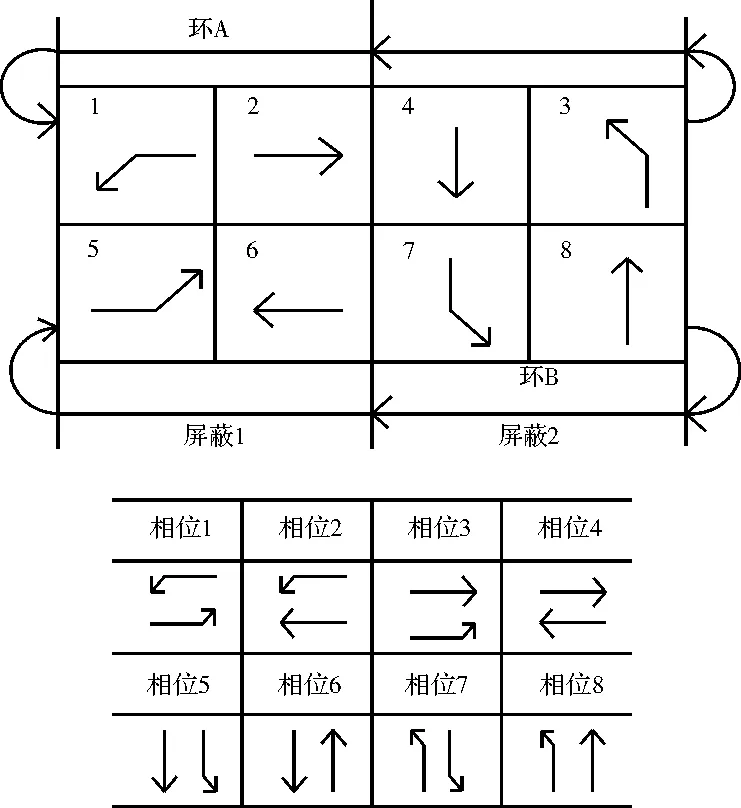
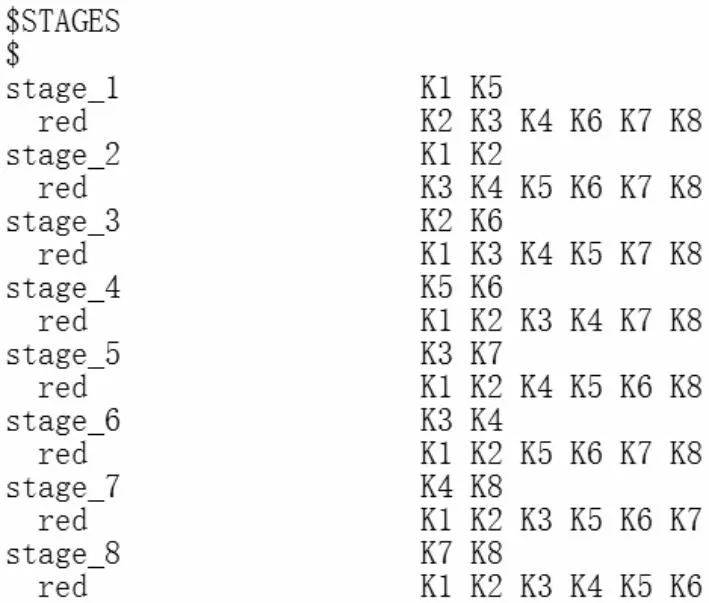
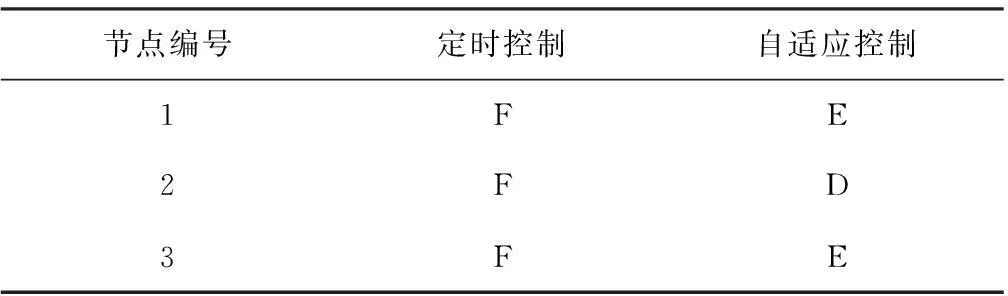
TACOS(Traffic Control for Over-Saturated Intersection)模型[7-11],规定在每条进口车道的停车线附近设置停车线检测器,而在每条渠化进口车道的展宽段开始位置设置上游检测器。当某一相位绿灯结束,将红灯相位中各进口道排队车辆等待时间>Tmax(一般取30~180 s)的相位作为备选绿灯相位,选择备选相位中的排队时间最长的相位作为下一绿灯相位;若所有红灯相位的排队时间均 步骤1计算备选相位关键车道的排队车辆数Np Np=max[max(Ni)M] (1) (Ni)=(Ni)-1+(Ni)1-(Ni)2 (2) 式中,M为相位p控制的车流;i为相位p的进口道编号,i=1,2,…;(Ni)M为当前信号周期,车流M、车道i的排队车辆数,单位为veh;(Ni)-1为上一信号周期,车道i的排队车辆数,单位为veh;(Ni)1为当前信号周期,到达车道i上游检测器的车辆数,单位为veh;(Ni)2为当前信号周期,通过车道i停车线检测器的车辆数,单位为veh。 步骤2计算相位p的绿灯时间Gp,Gp应保证相位p关键车道的排队车辆数以及后续到达的车辆能够不停车通过停车线 Gp=SULT+(Np+NAp)×Hdw (3) 式中,SULT为排队头车的启动延误,单位为s;NAp为相位p的绿灯启亮后,到达关键车道的车辆数,单位为veh;Hdw为饱和车头时距,单位为s/veh。 最理想的情况是上一相位绿灯结束时,最后一辆车通过停车线,这个绿灯时间即为最佳绿灯时间。假设将某相位内的车流分为两种形式,分别为主要车流(Np+NAp)和次要车流Ns,相位有效绿灯时间为 Ge=(Np+NAp+Ns)×Hdw (4) 步骤3校正绿灯时间Gp,为简化计算本文中没有考虑行人安全过街时间,只考虑了最小绿灯时间和最大绿灯时间[12]。 步骤4预测相位p的绿灯期间能够通过停车线的车辆数NDp (5) (NAi)M=Gp×(Ni)M/(ri)M (6) (NAi)M=NAp (7) 若(Ni)M不是相位p关键车道的排队车辆数,则为式(6),式中(ri)M为车流M、车道i的有效红灯时间;若(Ni)M是相位p关键车道的排队车辆数,则为式(7)。 步骤5计算相位p的进口道利用程度Ep Ep=(NDp×Hdw)/Gp (8) 步骤6重复执行步骤1~5,计算所有备选相位的进口道利用程度,并选出进口道最大车流作为主要车流,在可以与主要车流放行的两股车流中,排队车辆数较大的为次要车流,排队车辆数小的为备选车流。主要车流与次要车流组成关键相位,主要车流与备选车流组成次要相位。 步骤7计算关键相位绿灯时间,当前相位切换到关键相位。 步骤8根据关键相位当前放行绿灯时间计算主要车流剩余绿灯放行时间G,并比较G与Gi的大小。若G>Gi,则切换到次要相位;反之关键相位继续放行到相位绿灯时间结束。 图1 相位切换流程图 2仿真测试 2.1道路条件 本次仿真测试取自上海市某路段沿线3个交叉口组成的交叉口群,编号分别为1、2、3,在早高峰8:00~9:00进行分方向、分流向交通流量调查。进口道采用右侧展宽,最外侧进口道展宽段长度为50 m,展宽渐变段的长度为20 m。路段和进出口道的限制车速均为50 km/h,饱和流率为1 950 pcu/h。 2.2检测器的布设 一般把交叉口的车辆通行空间分为进口道、出口道、进口展宽段和展宽渐变段。为实时监测进口道的交通运行状态,要求布设进口道上游检测器、进口道停止线检测器,如图2所示,分车道实时获取排队长度。 图2 检测器的布局示意图 2.3相位方案设计 为简化计算,不考虑右转方向和行人流。根据双环结构[13]的原则:每环只有一个相位能够被激活,且被激活的相位必须处于同一屏蔽中。因此共有如下所示的8种情况,分别对应着8个相位。 图3 双环结构和相位方案 2.4仿真模型控制参数的设置 在Vissim里仿真时长为3 600 s,考虑到Vissim仿真开始时车辆并没有全部进入路网,不能反映真实交通情况,为确保仿真更符合实际路网运行状况,实验数据采集时段为600~4 200 s,以600 s为间隔进行统计。仿真实验总计进行6次,每次仿真运行选取的随机种子数分别为7,14,21,28,35,42。其他参数以Vissim默认的参数进行设置。 在VisVAP模块中,相位间隔文件pua中的相位间隔的持续时间为3 s,VAP文件中饱和车头时距h为2.25 veh/s,绿灯时间清空系数为1.2。如图4所示,当位于stage_1时,信号灯组1和5放行,信号灯组2、3、4、5、6、7、8处于红灯状态,以此类推,其他相位切换类似。VAP文件主程序如图5所示,Stage_active(i)表示相位i是否为绿灯状态,T_Green(i)表示返回指定信号灯组i的绿灯持续时间,gtime1为最小绿灯时间,由计算公式gtime1=q(i)×h×1.2,其中q(i)在子程序number中计算得到。 图4 相位切换方案 3分析评价 将调查得到的表1数据输入Vissim仿真软件中,利用VisVAP编程模块实现上述自适应控制策略,结合Vissim的评价功能并与定时控制进行对比分析。 表1 各交叉口交通流量调查表 pch/h 图5 VAP模块主程序流程图 3.1以行程时间为评价指标 本文在每个交叉口的每个进口道左转和直行方向布设行程时间检测器,每个路口8个,总共设置24个行程时间检测器。评价结果如图6所示。对比定时控制方案,除了第5组行程时间优化结果为-4%,其他行程时间均不同程度的减少了。从时间分布情况看,行程时间与流量输入相一致,从2 400~4 200 s,即8:30~9:00,行程时间比前半小时要多,这也与实际相符合。随着上班早高峰,人们出行量增大,必然造成道路的拥堵,行程时间也相应增大。 图6 行程时间评价 3.2以排队延误时间为评价指标 使用数据采集点可以进行单点数据采集,采用自动编组方式,采集多车道路段的相关数据。本文选取了排队延误时间作为评价指标,评价结果如图7所示。 图7 排队延误时间评价 3.3以节点为评价指标 通过Vissim自带的分析器报告功能采集了仿真过程中的平均排队长度、延误时间、最大排队长度、人均延误、车均停车延误、车均停车次数、服务水平LOS等7项指标,如图8所示。从节点评价结果看,除了节点1和节点3在最大排队长度稍逊于定时控制,其他指标自适应控制均表现良好的效果,各节点服务水平均有所提高。 表2 服务水平 图8 节点评价 3.4路网性能综合评价 路网性能评价可对仿真运行中整个路网的参数进行评价,本文主要选取平均延误时间、平均停车次数、平均速度、平均停车延误、总延误时间、总停车延误和总行程时间等7项指标。结果如图9所示,除了停车次数略微高点,其他各项指标均表现不错,尤其是出行者关心的延误、行程时间,说明过饱和交叉口群采用自适应控制改善了交通拥堵的状况,提高了交叉口的服务水平和整体运作效率。 图9 路网综合性能评价 4结束语 本文以过饱和交叉口群为例,基于VisVAP仿真评价研究,以行程时间、排队延误、节点评价以及路网性能总体评价进行分析,并与定时控制相比较。结果显示过饱和交叉口群实施自适应控制缩短了出行时间,提高了交叉口群整体的交通运作效率。目前阶段,过饱和状态交叉口群控制策略及优化目标并不成熟,本文只是做了初步探索,自适应控制实际投入运营维护费用高,决策者应该综合考虑各方面因素,做到因地制宜。 参考文献 [1]李岩,过秀成.过饱和状态下交叉口群交通运行分析与信号控制[M].南京:东南大学出版社,2012. [2]高云峰,胡华,陈红洁,等.交叉口群交通控制实时评价模型仿真研究[J].系统仿真学报,2007,19(24):5607-5612,5616. [3]徐洪峰,耿现彩,何龙.单进口轮流放行方式的四路环形交叉口交通信号控制[J].吉林大学学报:工学版,2014,44(4):953-962. [4]林晓辉.基于全感应控制的交叉口信号控制方法与模型[J].现代交通技术,2015,12(1):44-46,82. [5]雷磊,吴洋,刘昱岗.过饱和交叉口群系统建模及优化模型[J].计算机工程与应用,2010,46(4):26-28. [6]李岩,过秀成,杨洁,等.过饱和状态交叉口群信号控制机理及实施框架[J].交通运输系统工程与信息,2011,11(4):28-34. [7]Brandy H,Mark C.What have we learned about ITS? arterial management[M/OL].(2009-02-23)[2015-09-08]www.usdot.com.http://ntl.bts.gov/lib/jpodocs/repts_te/13319.pdf. [8]Li H,Prevedouros P D.Traffic adaptive control for oversaturated isolated intersections:Model development and simulation testing[J].Journal of Transportation Engineering,2004,130(5):594-601. [9]Crabtree M R,Henderson I R.MOVA traffic control manual application guide 44[M].Washington D C:TRL Limited,2005. [10]Dion F,Hellinga B.A rule-based real-time traffic responsive signal control system with transit priority:Application to an isolated intersection[J].Transportation Research Part B,2002,36(4):325-343. [11]徐洪峰,李克平.单点自适应控制策略回顾与展望[J].武汉理工大学学报:交通科学与工程版,2009,33(4):615-619. [12]道路与交通工程研究学会.交通信号控制指南:德国现行规范RiLSA[M].李克平,译.北京:中国建筑工业出版社,2006. [13]Trafficware Ltd.Traffic signal software-user guide:synchro studio 7examples[M].Washington D C:Trafficware Ltd,2009. 欢 迎 订 阅 2016 年《电子科技》杂 志 邮 发 代 号 52-246 中图分类号TP273+.2;U491.2+3 文献标识码A 文章编号1007-7820(2016)03-017-05 doi:10.16180/j.cnki.issn1007-7820.2016.03.005 作者简介:赵亚东(1990—),男,硕士研究生。研究方向:交通仿真等。吴其龙(1990—),男,硕士研究生。研究方向:交通信息工程及控制。 收稿日期:2015- 11- 06