基于PLC的低压舱控制系统
2016-04-13杨肖委卢剑锋李宜汀杨政通
杨肖委,卢剑锋,李宜汀,杨政通,孙 哲
(贵州大学机械工程学院,贵州贵阳550025)
基于PLC的低压舱控制系统
杨肖委,卢剑锋,李宜汀,杨政通,孙哲
(贵州大学机械工程学院,贵州贵阳550025)
摘要:为了实现低压舱舱内压力、升降速率、新风量的精确控制和连续作业的自动控制,系统采用西门子S7-200 PLC作为控制器核心,应用PID算法来自动调节真空泵频率、阀门开度等,并通过改变真空泵的变频调速,实现模拟控制舱内压力随海拔升降速度和高度变化的目的。通过研究表明,该控制系统控制准确可靠,有较好的节能效果,降低了操作人员的劳动强度和整个系统的噪声并提高了整个系统的安全性。
关键词:低压舱PLC变频调速模糊PID
0引言
低压舱是一种高原气压环境模拟舱,主要用于研究高原上生活的人体机理反应和人体抵抗力,并在登山、体育运动和临床医学等领域有科研和应用价值[1]。
早期的低压舱系统是通过对机械式调节阀的人工手动调节来实现控制的,其控制效果在很大程度上依赖于操作人员的熟练程度和操作经验,控制精度和稳定性较差,而且操作人员劳动强度大。
考虑到舱内试验人员的安全性,采用可靠性高的西门子S7-200PLC作为低压舱控制系统的核心控制器,该系统已成功应用于很多医学院的低压舱系统中。
1低压舱系统原理
低压舱原理如图1所示[1],其主体结构为一个密封舱,密封舱有两个外接管路,一个直接通大气,用于从外界吸入新鲜空气以保证舱内人员的顺畅呼吸;另一管路接到真空泵用于抽出舱内空气。真空泵1处于抽气端,用西门子MM440变频器来驱动和调速。进气端上设置有一个电动调节阀2,用于调节进气流量。当抽气量大于进气量时,舱内气体密度减少,舱内压力下降或者说舱内海拔上升。而当进气和抽气量平衡时,舱内压力将维持在某个值上不变,或者说舱内海拔高度不变。
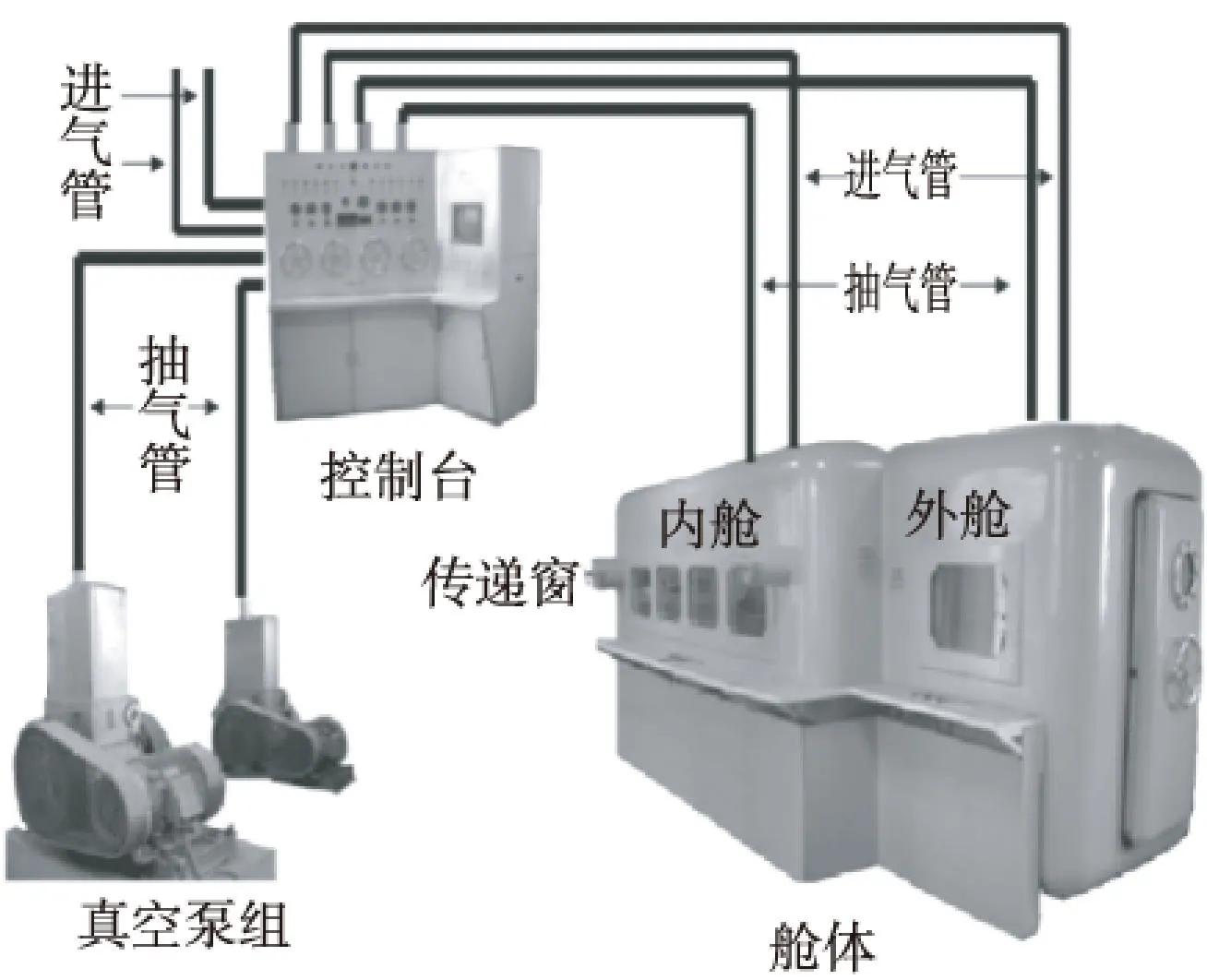
图1 低压舱系统原理图
2控制系统组成及工作原理
2.1低压舱模糊控制系统
低压舱模糊控制系统如图2所示: 低压环境实验舱自动控制系统是一个以西门子SIMATIC S7-200 PLC为核心的控制系统。控制系统对舱体的工作运行状态实施自动检测与控制,使海拔训练舱按照设计要求,完成升降压速度、维持高度、氧浓度、二氧化碳浓度、温湿度等指标的监测与控制,从而达到试验目的[2]。
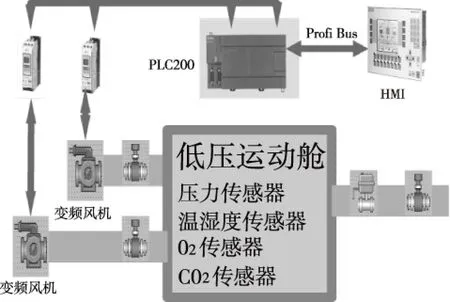
图2 低压舱控制系统图
2.2低压舱控制系统的工作原理
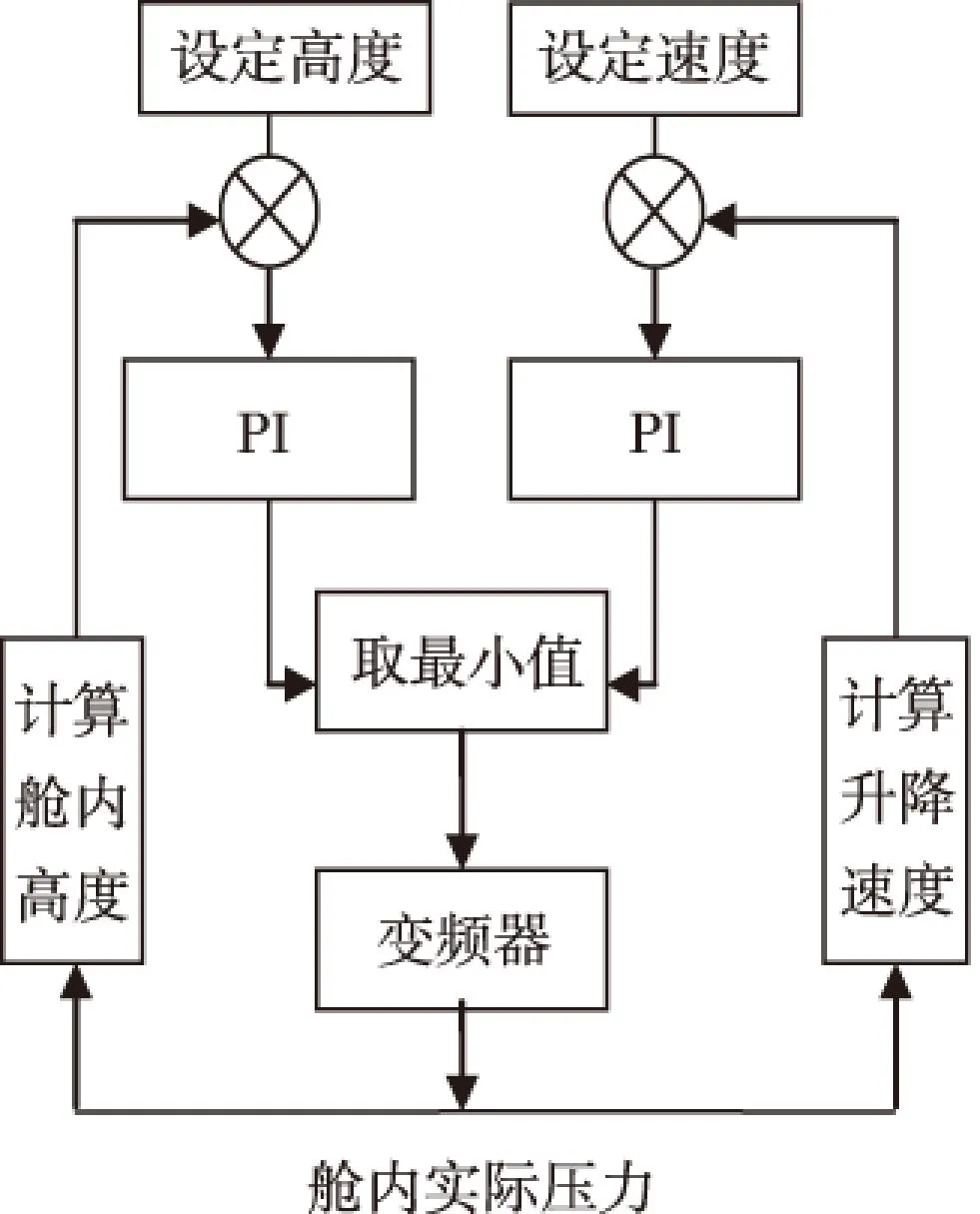
图3 低压舱控制原理图
升降速率和高度的超调会引起舱内人员不适甚至造成伤害,新风量如不足会影响舱内人员呼吸困难[3]。高度升降速度由实际的高度计算而得,其信号源是压力传感器,升降速度的控制由PI控制器进行闭环控制。因此,低压舱控制的关键是模拟高度、升降速率和新风量的控制。采用PI调节器来控制这三个关键参数。
低压舱控制原理如图3所示。
低压舱上升速度和高度的控制原理基本相同,均是从舱内压力变送器采集压力信号送入PLC,在PLC中经模数转换后得到舱内的实际压力值,实际压力值通过相应公式被转换为对应的实际的海拔高度并计算出升降速度,海拔高度和升降速度的实际值和设定值被分别送入各自的PI调节器,然后取两个PI调节器运算结果中的最小值用于设定真空泵的转速,从而可以控制舱内的实际海拔的升降速度和高度[4]。
3控制系统软件
控制系统上位机操作软件采用西门子WINCC编制,PLC控制程序采用STEP7 V5.3编制[5]。
控制系统软件可显示控制实验舱高度(压力)、高度升降速率、二氧化碳浓度、显示温度、氧浓度、湿度;可设置和控制高度(压力)、升降速率、新风量。系统可保存、输出30天的设备运行参数和趋势图形。
软件具备软手动与自动控制功能,自动控制时操作人员只需要在电脑人机界面上设置高度、升降速度和新风量等参数,系统会按所设置的参数自动运行并达到要求;软手动时操作人员在电脑人机界面上可分别单独控制真空泵(变频器)、电动调节阀等执行元件[6]。
上位机只具备参数显示与传输功能,具体控制过程均由PLC完成,确保上位机故障时不会影响设备的正常工作。
通过控制调节阀和风机的开启以及流量的大小来控制舱内的速度,压力,新风量等。控制布局如图4所示。

图4 控制布局视图
控制面板采用触摸屏,如图5所示,可以直观地设置控制参数,而且很容易的调节或者改变控制参数。
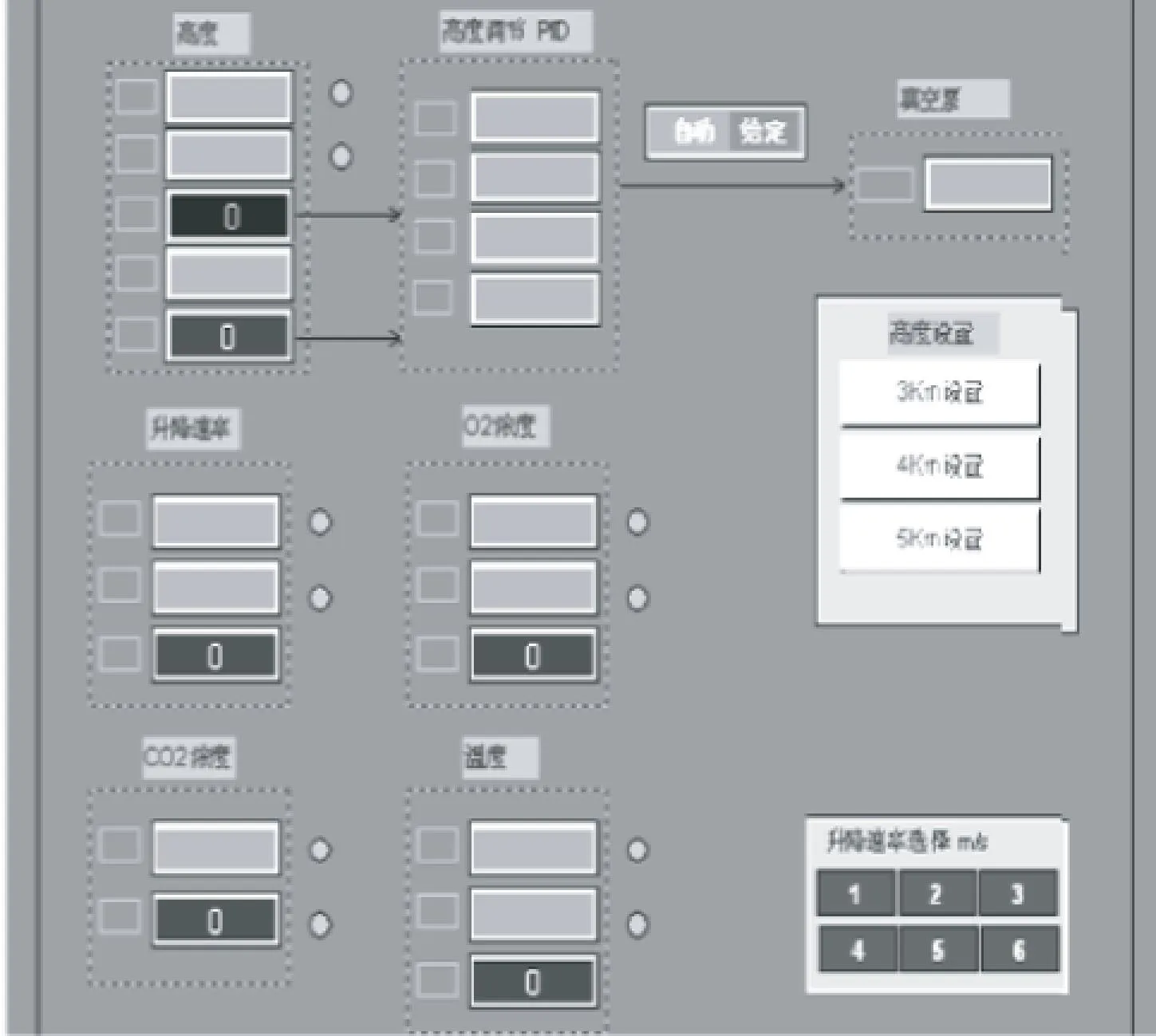
图5 控制面板视图
4系统安全性设计
保证舱内人员在示意过程中的安全至关重要,控制系统采用了以下安全措施。
1)舱内安全高度保护:可在人机界面上设置安全高度,当舱内高度超过安全高度时根据需要报警或停机;
2)安全下降速率和上升速率保护:可在人机界面上设置安全下降速率和上升速率,当舱内高度超过安全下降速率和上升速率时根据需要报警或停机;
3)对重要传感器采用冗余技术,以防止传感器失灵时对系统和人员产生伤害,控制程序中将能自动判别传感器是否失灵;
4)控制台上设置机械式的紧急停止按钮,遇到紧急情况,可以按下急停按钮,停止真空泵的运行和关闭各电动阀门,解除自动功能,保证舱内压力不变, 确保舱内人员的安全,然后再通过机械式阀门进行应急操作;
5)应用软件具有完善的口令安全保护功能,防止无关人员非法操作;
6)系统具有硬件自诊断功能:在系统启动时,可以检测硬件是否正常,防止设备带故障运行。
5结果
在海拔高度模拟的过程中,设定海拔高度的维持其实质上就是对绝对气压的维持。10 000 m以下的高度与气压的换算公式下:
式中H代表海拔高度,P为绝对气压。上式经整理后得出如下公式:

海拔高度与大气压力对照如表1。

表1 海拔高度与大气压力对照表
6结束语
控制系统实际的运行效果良好,实现了对舱内压力(高度)、升降速率和新风量的精确控制及连续作业的自动控制,控制稳定可靠,降低了操作人员的劳动强度并提高了整个系统的安全性。与早期的通过调节阀门开度来调节舱内压力的低压舱相比,本系统通过真空泵的变频调速来调节舱内压力,这种方式具有良好的节能效果,并减少了因阀门处节流而产生的噪声[7]。
参考文献
[1]韩文强,胡文东. 低压舱技术的发展及其应用[J].医疗卫生与装备,2009,30(9):37-39.
[2]徐斌,张方,孙新奇,梅丹,金连海.温控小动物低压舱的研制[J].空军医高专学报,1998(03).
[3]王忠明,许永华,黄泽阳,姜文亭,曹金军,杨自更,张东辉,耿西亮,许琴. 基于大型复合低压舱的模拟海拔高度系统研制[J]. 医疗卫生装备,2011(11)12-13.
The control system of hypobaric chamber based on PLC
YANG Xiaowei,LU Jianfen,LI Yiting,YANG Zhengtong, SUN Zhe
Abstract:In order to achieve accurate control of the pressure of hypobaric chamber, changing rate and the fresh air, as well as the autocontrol of continuous operation, using the Siemens S7-200 PLC as the key controller and PID algorithm, the automatic adjustment of the frequency of vacuum pump and valve opening is realized. Furthermore, the frequency control is changed in order to achieve the purpose that the pressure changes with the actual altitude's lifting speed and height in the analog control cabin. The study shows that the control system has high control precision and good liability, which can save energy, reduce labor intensity and the noise of the whole system, and enhances security.
Keywords:hypobaric chamber;PLC;frequency control;fuzzy PID
中图分类号:TP23
文献标识码:A
文章编号:1002-6886(2016)01-0069-04