基于多源信息融合的行人航位推算室内定位方法
2016-04-13刘春燕
刘春燕
(福建省测绘产品质量监督检验站,福州 350001)
基于多源信息融合的行人航位推算室内定位方法
刘春燕
(福建省测绘产品质量监督检验站,福州 350001)
传统行人航位推算(Pedestrian Dead Reckoning, PDR)定位技术存在严重的误差累积问题。针对因航向偏差引起的误差累积,提出一种借助建筑几何信息实现行人航向的实时补偿方案,通过提高定向精度来抑制定位误差的累积传递。分析利用外源绝对位置改善PDR定位结果,试验一种自适应模型噪声的扩展卡尔曼滤波(Extended Kalman Filter, EKF)滤波算法,实现PDR与WIFI定位源的滤波融合。通过实验对比分析,基于改正航向的PDR相较于传统PDR,有效抑制了误差的累积,将整体误差控制在5 m左右;传统PDR与WIFI源滤波融合,比单纯传统PDR提高了82.8%的精确度;航向改正PDR与WIFI源相融合,则比单纯传统PDR和航向改正PDR分别提高了90.2%和49.5%的精确度。结果表明:补偿改正航向和借助外源绝对位置滤波融合均可有效控制传统PDR的误差累积,根据条件约束可知航向改正PDR及其与WIFI源融合方案较适用于规则室内环境,而原始航向PDR与WIFI源融合方案则不受室内结构影响,在多次滤波后逐渐提高行人定位精度,从而可满足行人室内定位精度需求。
行人航位推算定位;几何信息;航向补偿;WIFI定位源;滤波融合
随着人们对各大型室内场景位置服务的需求日渐迫切,室内定位技术成为当前的研究热点。微机电系统(Micro-Electro-Mechanical System, MEMS)的迅速发展促使惯性传感器逐渐向小型轻质化发展。MEMS传感器具有功耗低、成本低等优势,使其成为室内行人导航定位技术的一种可靠选择[1]。通过惯性传感器实时测量行人的线运动、角运动等信息,建立室内行人航迹推算系统实现位置估算[2]。该项技术根据原理不同,可以分为根据惯性导航机制的连续积分定位和行人航位推算 PDR定位:前者对惯性测量单元(Inertial measurement unit, IMU)的传感器精度要求高,不适用于行人定位;后者则可直接利用用户自带移动智能设备中内置的传感器件,通过识别步数、计算步长和确定行进方向,即可实现基本的行人位置计算。
相关研究表明现有的步频检测及步长计算方法已相当成熟,在一定条件下平滑区域检测[3]、零点交叉检测[4]、峰值检测[5-6]及自相关法[7-8]等均可获取高准确率的步态识别,将加速度数据的某些统计值,如最值、方差、周期等利用线性模型或非线性模型即可获取满足航位推算需求的行人步长值。传统航位推算方法因航向、步长及步态等估算误差的传递,通常存在严重的误差累积问题,文献[9]特别指出航向是影响 PDR定位误差累积的关键因素。
针对误差累积问题,本文从过程融合和结果融合两种方法讨论研究对传统PDR定位的改善补偿应用:一是考虑规则建筑的几何信息鲜明,可充分利用几何信息实现对航向的补偿改正,从而达到PDR位置计算的纠正;二是虽 WIFI定位系统稳定性较差且定位精度偏低,但无线网络的普及使其实现简单,且获取的是绝对位置坐标,因此设计一种顾及行人运动信息的卡尔曼滤波器,将WIFI定位结果与PDR位置信息作融合运算,提高行人室内定位的稳健性与可靠性。
1 行人航位推算PDR定位
借助行人智能终端中传感器件的 PDR室内定位技术是一项完全自助式的连续定位技术,具有短时间精度高、自主性强的特征[10],它是利用智能手机内置的加速度计、方向传感器以及陀螺仪组合成测量单元,利用下式计算移动终端的位置:

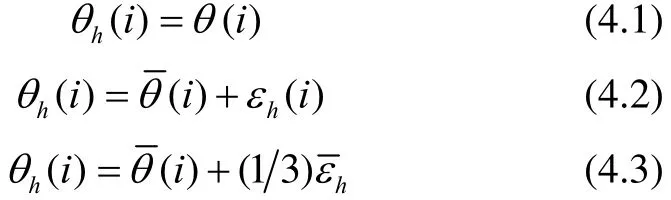
式中,(N, E)表示位置点坐标,L表示步长,θh表示航位角。
PDR由步态检测、步长估计和航向估算三步骤组成[11-12]。本文涉及的步态识别采用简单参数多重约束的波峰-波谷检测模型[5],该模型避免复杂参数的筛选与训练学习,步频检测准确性达 99.2%。步长计算采用具有稳定运算性能的线性模型(2),以计算距离与真实距离之间的绝对差值作为评价指标,经多组实验验证,该线性模型平均绝对距离差为0.93 m,方差为0.61 m2,其精度与稳定性均满足PDR运用。

1.1 方向传感器原始航向信息
智能设备内嵌的方向传感器返回三轴角度数据,包括θ、δ和α。θ表示方位角度,通常以接近水平状态下的θ作为原始航向值,对整周步态内的原始航向求均值作为行人的步态航向与α分别是设备x 轴、y 轴与水平面之间的夹角值,当设备保持水平稳定时,两者的变化基本可保持在[-5°, 5°]之内。
方向传感器直接输出的方向值θ是由磁罗盘计算得到的,而磁罗盘极易受到环境或平台所带来的磁干扰,因此原始输出航向值往往与真实航向存在一定偏差。如图1所示,最大偏差将近30°,其中,图1(b)中虚线表示建筑物廊道的几何方向值,为行人真实航向。
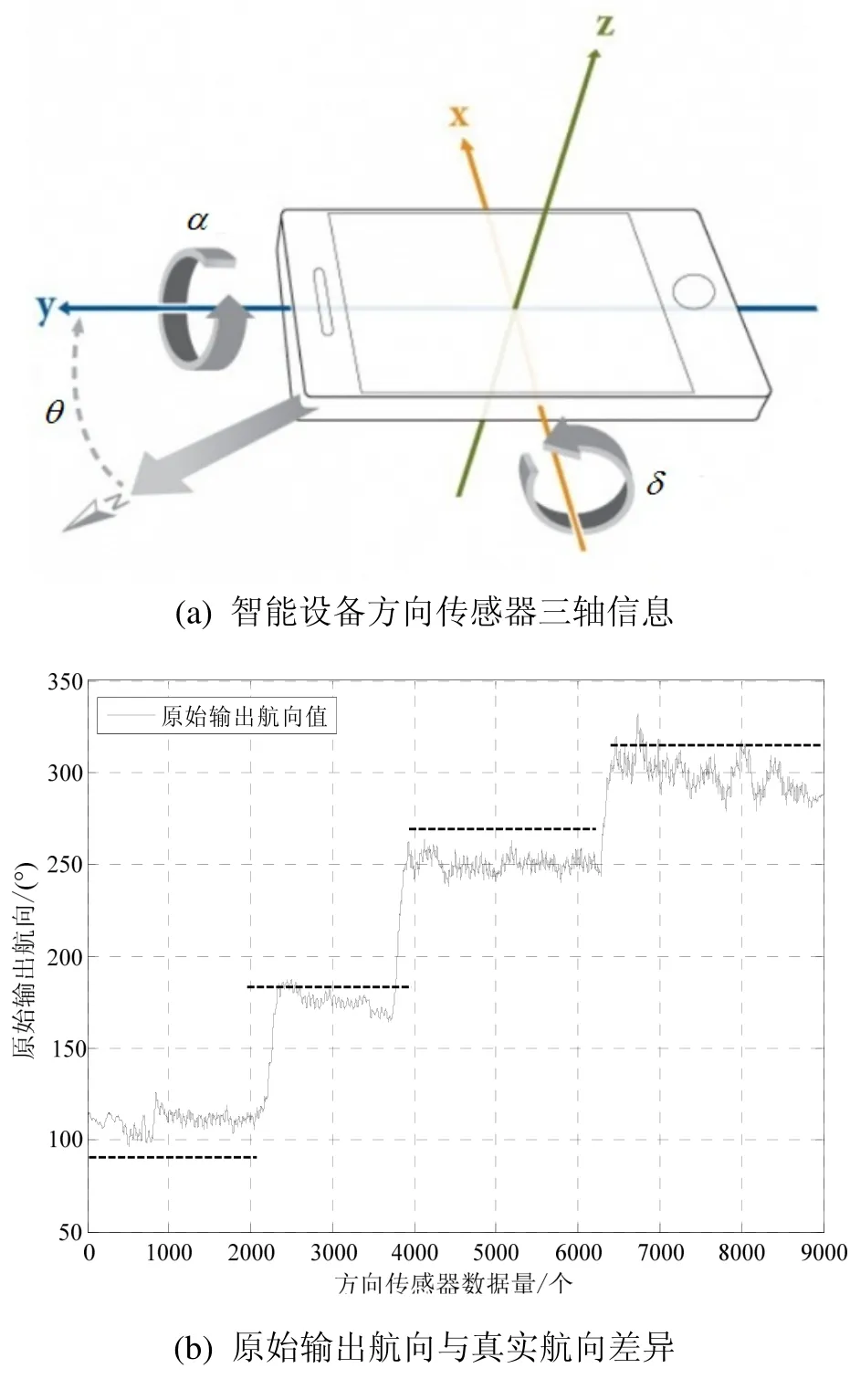
图1 智能设备内嵌航向信息获取Fig.1 Course information acquisition by embedded smart devices
1.2 几何信息实时补偿航向
磁罗盘所受干扰将产生各种误差,包括可预测误差和不可预测误差两大类,文献[9]表示源于环境干扰的不可预测误差往往难以规避,但可预测误差却可通过静态校准或动态补偿来消除。该误差包括磁偏角、软硬铁效应、比例因子和固定偏置、平台倾斜、安装未对准和移动行人身体抖动等7种[13],依各自特征均可建立相关模型。文献[9]提出一个包含所有可预测误差的统一模型,并对其作简化处理得到公式(3)的近似航向误差 hε模型:

在试验场,中国矿业大学环测学院三楼设计相应的实验对以上航向补偿模型进行验证:行人手持设备沿图3箭头方向的走廊中线前进,按照建筑的地理几何方向,航向的变化情况是90°转至180°转至270°转至360°。计算得到原始平滑航向与实时补偿航向结果如表1所示。行人实时航向的具体补偿估算流程如图2所示,其中,
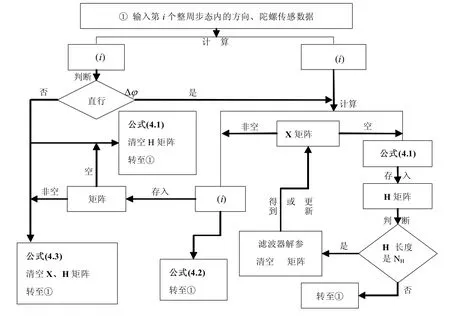
图2 实时补偿航向估算流程图Fig.2 Flow chart of real-time compensation course estimation
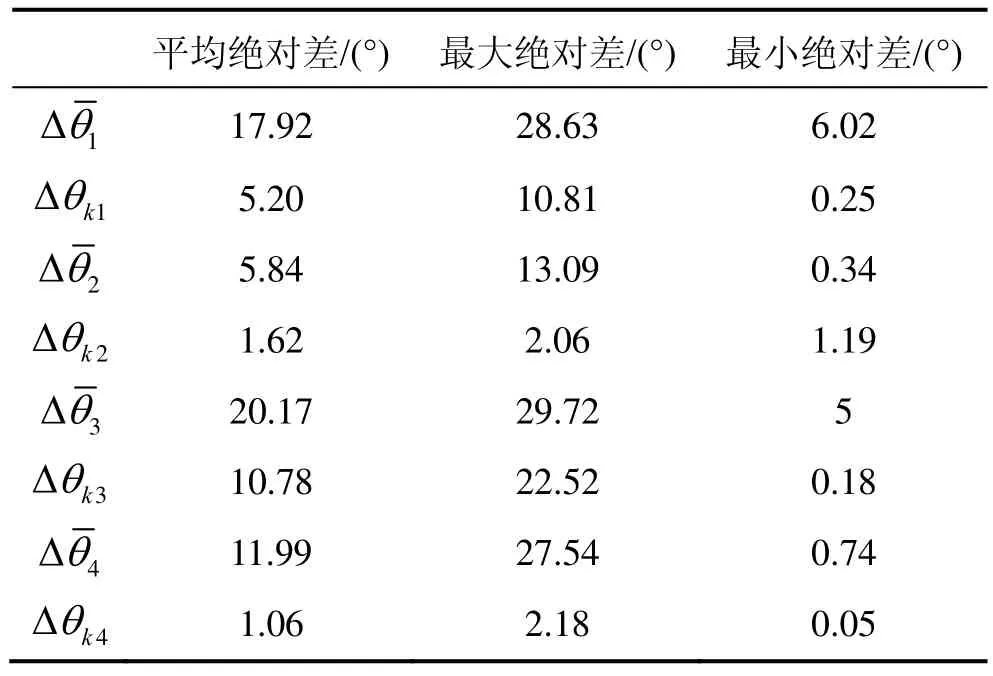
表1 不同方法确定航向误差的对比分析Tab.1 Comparative analysis for heading estimation errors based on different methods
将不同方法获取的行人航向用于行人定位运算,分别以原始平滑航向、规则建筑几何方向信息θrg和实时补偿航向θh设计三种 PDR定位方案,得到行人的运动轨迹如图3所示。
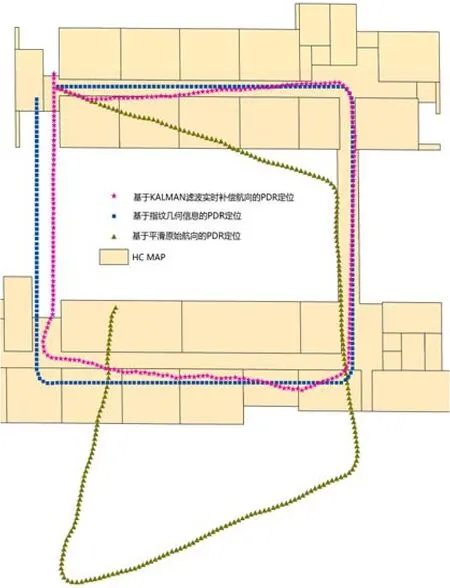
图3 基于不同航向信息的PDR定位结果Fig.3 PDR positioning results for different course information
1.3 自适应模型噪声的EKF滤波融合定位
按照卡尔曼滤波融合原理,本文设计一种顾及运动信息的自适应确定动态模型噪声的扩展 KALMAN滤波器,将具有绝对定位功能的WIFI定位源与PDR定位相融合,实现更高精度与稳定性的室内定位。以位置误差和移动距离值差、航向偏差作为滤波器系统的状态变量,即系统状态向量为

当WIFI系统位置更新时,以WIFI与PDR两系统的位置差作为系统观测值,即:

EKF状态方程可表示为
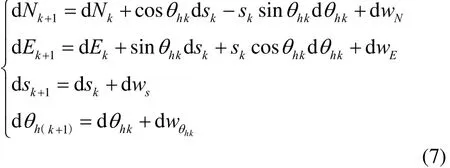
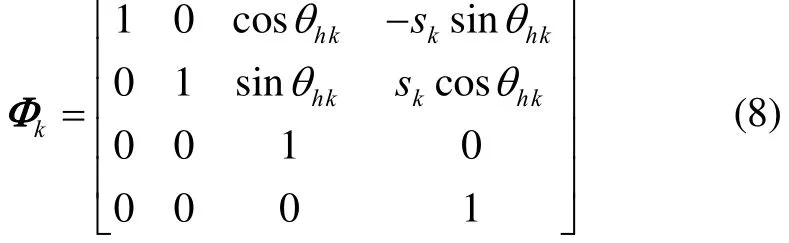
状态转移矩阵为
观测矩阵为

对于滤波过程所需的动态噪声序列和观测噪声序列,结合大量的定位结果数据,对WIFI和PDR两系统定位的误差统计特性分析得到经验数值,动态噪声矩阵为

当低频输出的 WIFI位置未更新时,将系统预测坐标与PDR观测坐标之间的差值作为系统观测变量,其他不变,进行递推纠正PDR的位置计算。

式中:
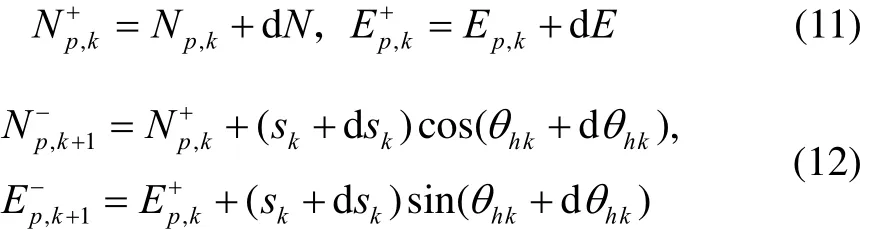
公式(11)是利用滤波得到的位置误差,更新当前时刻的行人位置,也是融合模型计算得到k时刻的最终位置,并用滤波误差值对下一时刻k+1进行位置预测(公式(12))。
2 试验与结果分析
2.1 试验设计
中国矿业大学环测学院四楼已搭建WIFI网络系统(如图4所示),已有WIFI定位系统定位频次根据设备对 WIFI信号更新识别的频次自动设定,正常情况下是每间隔 1 s至 2 s给移动用户发送一次位置信息。选用三星Galaxy Note3作为定位测试设备,设备内嵌传感器数据采样频率设置为 50 Hz,对每一个新输入的传感数据作相应的步态检测、步长计算和航向估算。在融合过程中,以 WIFI信号采集定位时间戳为基准,将WIFI定位结果与航位推算PDR定位结果作EKF滤波融合处理。根据数据分析得知当用户以正常速度步行前进时,2 s时间内将跨出4~5步(如图4 (b)所示),平均移动距离为3.5 m。
本文的试验设计是,用户沿环测学院四楼走廊中线行走,从B区西端出发,以常速沿着走廊经过A区走向C区最西端。在此过程中,行人基本保持水平保持设备,总步行316步。通过计算各种定位方案的点位误差以及误差分布情况,评定各方案的定位性能。WIFI定位系统采用现有 WKNN算法[15]实现位置计算,得到平均误差为3.73 m,最大误差为16.95 m。在起始点以WIFI定位系统的多次平滑结果作为PDR初始位置信息,设计以下4种方案:
方案1:基于步态原始平滑航向的PDR定位方法,标记OHPDR;
方案2:以几何信息实时滤波补偿航向的PDR定位方法,标记AHPDR;
方案3:基于自适应模型噪声确定的扩展卡尔曼滤波实现WIFI与OHPDR融合定位,标记EKFWOHP;
方案4:基于自适应模型噪声确定的扩展卡尔曼滤波实现WIFI与AHPDR融合定位,标记EKFWAHP。
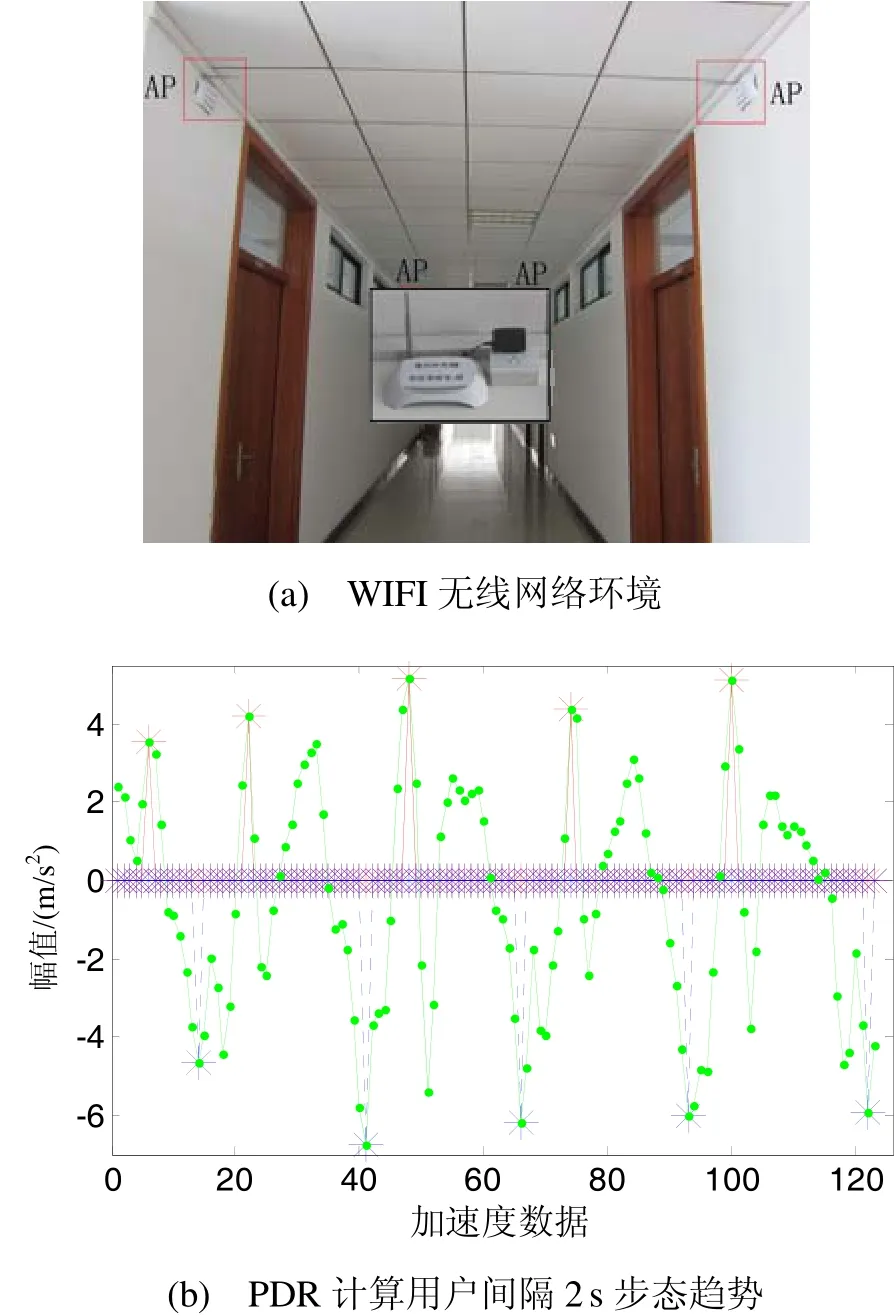
图4 试验环境Fig.4 Test environment
2.2 试验结果与分析
根据不同方案得到的定位结果如下所示:表2和图5以图表形式给出了各方案定位误差情况,图 6展现了不同方案的定位轨迹。
图表结合对各方案进行具体分析得到:
方案 1随着时间的增长,定位误差不断变大。误差值从初始的3.78 m逐渐累积到44.95 m,定位航迹完全偏离真实轨迹。
方案 2在航向补偿改正的基础上,PDR定位误差控制在5 m左右,最大误差是 5.39 m,说明这种航向改正型的 PDR 定位方案有效解决了误差累积问题。但由于WIFI定位系统提供的初始位置本身存在 3.78 m误差,导致在第一次转弯后便偏离真实轨迹,在不同直行廊道上均表现以不同距离平行间隔。因此步态识别与步长计算满足条件的情况下,该方案的定位精度基本由起算点位置的准确度起决定性作用。
方案 3以原始平滑航向推算行人航位,加入WIFI系统的绝对位置,采用自适应模型噪声的扩展卡尔曼滤波进行融合计算。就平均定位误差而言,比原始航向 OHPDR定位精度提高了 82.8%。根据航迹显示分析,该方案同样很好地抑制了原始航向OHPDR的误差累积,且随着绝对位置融合次数的增多,逐渐将偏离的点拉回到真实轨迹方向,由此说明随着 WIFI定位信息的更新,可逐渐补偿传统PDR的定位精度,以满足行人室内定位使用。从航向估算来看,该方案可用于无法使用建筑几何改正航向的不规则室内环境定位运用。
方案4将WIFI定位结果与航向改正型AHPDR采用自适应卡尔曼滤波进行融合计算,试验结果表明其不仅解决了原始PDR的严重误差累积问题,还很大程度提高了定位精度,相较前3个方案,最小误差分别降低了93.7%、92.8%和29.4%,平均误差分别降低了90.2%、49.5%和43.1%,最大误差比第1和第3个方案降低了87.4%和28.3%。与独立航向改正方案2相比,方案4很好地解决了由初始位置误差引起的全程传递问题。
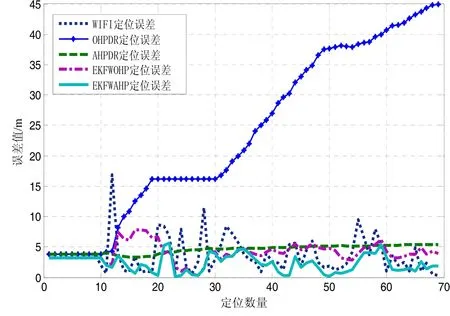
图5 不同方案定位误差分析Fig.5 Positioning error analysis for different solutions
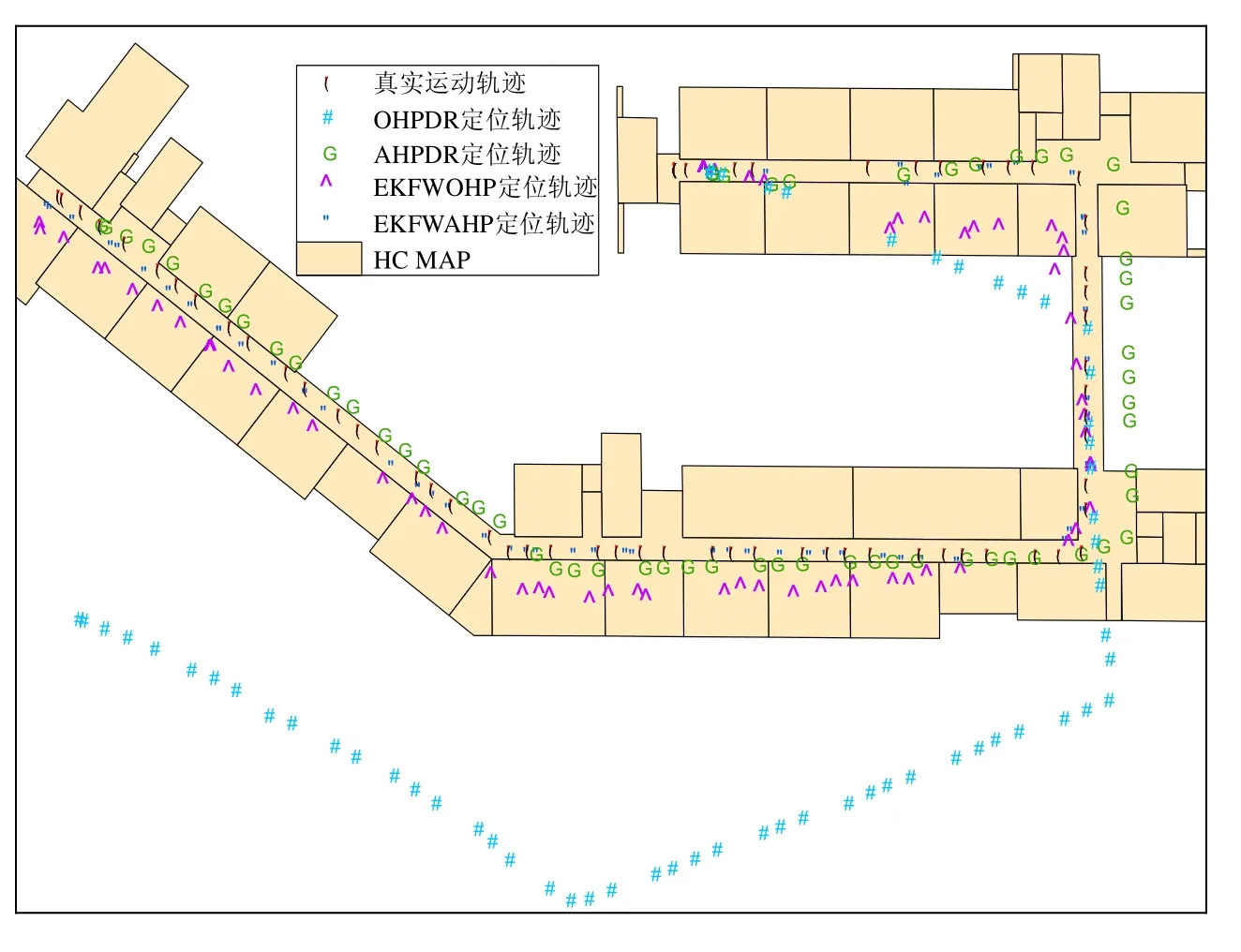
图 6 与PDR 相关的不同方案定位轨迹分析Fig.6 Positioning trajectory analysis for different solutions associated with PDR
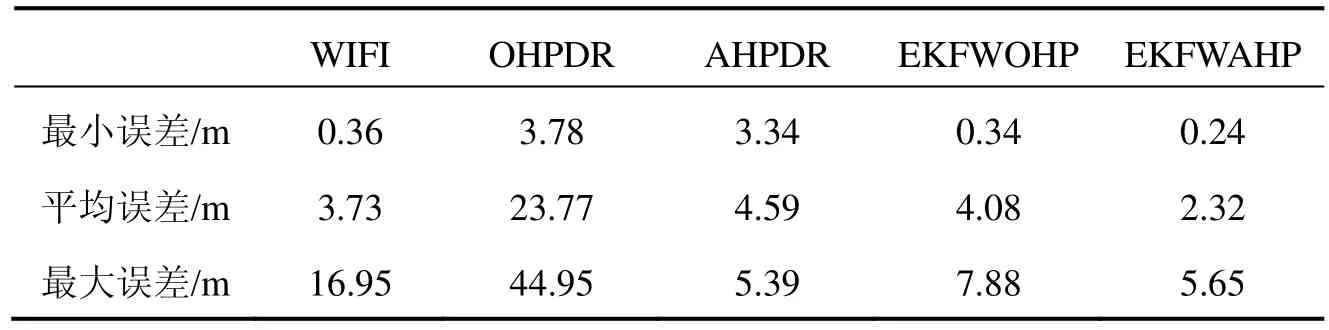
表2 不同方案定位误差分析Tab.2 Positioning error analysis for different solutions
综上,在以PDR 技术实现室内定位导航时,首要问题是解决定位误差的累积效应,可通过改正行人航向或者利用外源绝对位置信息适时对 PDR结果进行滤波校正得以解决处理。特别是,在航向修正的基础上,以WIFI系统的定位结果与PDR作融合处理,能够获得2.5 m范围内高精度室内定位结果,很好地满足行人室内导航定位要求。另外,这种融合定位方法,对 WIFI独立定位系统同样存在很好的校正作用,平均误差提高了37.8%,最大误差降低了11.3 m。
3 结 论
针对传统PDR误差累积无法长时间精确定位问题,提出了两种方法实现定位误差累积的抑制:一是借助规则建筑物的几何方向通过卡尔曼滤波估算航向误差修正参数,通过补偿航向信息提高定位精度,与原始平滑航向定位精度相比提高了80.7%。二是顾及行人运动属性,建立自适应模型参数的EKF模型,实现WIFI定位源的绝对位置信息与PDR定位结果的融合。第二种方法首先有效解决了传统PDR定位误差累积,通过与原始平滑航向PDR方案经过多次融合计算的结果,可满足于不规则的室内环境定位运用,平均定位精度可达 4.08 m,与航向改正型 PDR方案相结合,解决了由初始位置误差引起的误差传递问题,并定位精度整体提高了49.5%。由此,将WIFI与PDR多源定位结果融合,能够满足用户室内高精度定位应用需求。
(References):
[1] 孙立宁, 周兆英, 龚振邦. MEMS国内外发展状况及我国 MEMS发展战备的思考[J]. 机器人技术与应用, 2002(2): 2-4. Sun Li-ning, Zhou Zhao-ying, Gong Zhen-bang. The status of MEMS development inside and outside and the develop strategic considering in our country[J]. Robot Technology and Application, 2002(2): 2-4.
[2] Fischer C, Gellersen H. Location and navigation support for emergency responders: A survey[J]. IEEE Pervasive Computing, 2010, 9(1): 38-47.
[3] Cho S Y, Park C G. MEMS based pedestrian navigation system[J]. Journal of Navigation, 2006, 59(1): 135-153.
[4] Beauregard S, Haas H. Pedestrian dead reckoning: a basis for personal positioning[C]//Proceedings of the 3rd Workshop on Positioning, Navigation and Communication. 2006: 27-35.
[5] Wang J, Hu A, Liu C, et al. A floor-map-aided WiFi/ Pseudo-odometry integration algorithm for an indoor positioning system[J]. Sensors, 2015, 15(4): 7096-7124.
[6] 陈国良, 李飞, 张言哲. 一种基于自适应波峰检测的MEMS计步算法[J]. 中国惯性技术学报, 2015, 23(3): 315-321. Chen Guo-liang, Li Fei, Zhang Yan-zhe. Pedometer method based on adaptive peak detection algorithm[J]. Journal of Chinese Inertial Technology, 2015, 23(3): 315- 321.
[7] Weimann F, Abwerzger G, Hofmann-Wellenhof B. A pedestrian navigation system for urban and indoor environments[C]//Proc. 20th International Technical Meeting of the Satellite Division of the Institute of Navigation ION GNSS. 2007: 1380-1389.
[8] 陈国良, 张言哲, 杨洲. 一种基于手机传感器自相关分析的计步器实现方法[J]. 中国惯性技术学报, 2014, 22(6): 794-798. Chen Guo-liang, Zhang Yan-zhe, Yang Zhou. A realization method of pedometer with auto-correlation analysis based on mobile phone sensor[J]. Journal of Chinese Inertial Technology, 2014, 22(6): 794-798.
[9] 陈伟. 基于GPS和自包含传感器的行人室内外无缝定位算法研究[D]. 合肥: 中国科学技术大学, 2010. Wei Chen. Research on GPS/self-contained sensors based seamless outdoor/indoor pedestrian positioning algorithm [D]. Hefei: University of Science and Technology of China, 2010.
[10] 张世哲. 基于惯性传感器和WiFi的室内定位系统的设计与实现[D]. 北京: 北京邮电大学, 2012. Zhang Shi-zhe. Indoor positioning system design and implementation based on inertial sensor and WIFI[D]. Beijing: Beijing University of Post and Telecommunications, 2012.
[11] Yim J. Introducing a decision tree-based indoor positioning technique[J]. Expert Systems with Applications, 2008, 34(2): 1296-1302.
[12] Li F, Zhao C, Ding G, et al. A reliable and accurate indoor localization method using phone inertial sensors[C]//Proceedings of the 2012 ACM Conference on Ubiquitous Computing. ACM, 2012: 421-430.
[13] Chen W, Chen R, Chen Y, et al. An adaptive calibration approach for a 2-axis digital compass in a low-cost pedestrian navigation system[C]//Proc. IEEE I2MTC. Austin, TX, USA, 2010: 1392-1397.
[14] 刘春燕, 王坚. 基于几何聚类指纹库的约束KNN室内定位模型[J]. 武汉大学学报(信息科学版), 2014, 11: 1287-1292. Liu Chun-yan, Wang Jian. A constrained KNN indoor positioning model based on geometric clustering fingerprinting technique[J]. Geomatics and Information Science of Wuhan University, 2014, 11: 1287-1292.
Indoor localization method based on pedestrian dead reckoning aided by multi-source fusion
LIU Chun-yan
(Fujian Provincial Quality Supervision and Inspection Station for Surveying and Mapping Products, Fuzhou 350001, China)
In view that traditional PDR localization technology has serious error accumulation problem, andthe accumulated error is caused by course deviation, an improved course estimation solution is proposed by using geometric information to compensate and enhance the pedestrian course. We make such analysis that the exogenous absolute location is used to improve the positioning result of pedestrian dead reckoning(PDR), then an evolved EKF filtering algorithm with adaptive model noise is proposed, which realizes the PDR and WIFI positioning sources’ filtering fusion. Experiment results show that, compared with traditional PDR, the PDR with enhanced-course can effectively restrain the error accumulation, and the total errors are controlled to about 5 m. The accuracy of original-course PDR adaptive filtering with WIFI location is improved by 82.8%, compared with the pure original-course PDR’s one. And when fusion with enhanced-course PDR and WIFI location, the accuracies are improved by 90.2% and 49.5% respectively compared with the pure original-course PDR’s and enhanced-course PDR’s. These results show that enhancing course and fusion with exogenous absolute position can both effectively restrain the error accumulation. Considering the constraint conditions, the improved-course PDR schemes are applicable to a regular indoor environment. However, the original-course PDR and WIFI fusion scheme is not affected by the indoor structure, and its results with couple filtering calculation can meet the accuracy requirements for pedestrian indoor positioning.
pedestrian dead reckoning localization; geometric information; course compensation; WIFI positioning source; filtering fusion
U666.1
A
1005-6734(2016)02-0208-07
10.13695/j.cnki.12-1222/o3.2016.02.013
2015-12-10;
2016-03-18
国家863计划项目(2013AA12A201)
刘春燕(1990—),女,硕士,助理工程师,从事室内定位研究和测绘产品质量检验。E-mail:lcy_sia@163.com