工业铁路车辆位置跟踪方法
2016-04-12徐劲松
程 磊, 陈 峰, 徐劲松, 董 炜
(1.合肥工业大学 计算机与信息学院,安徽 合肥 230009; 2.马钢(合肥)钢铁有限责任公司,安徽 合肥 230000; 3.马鞍山钢铁股份有限公司 铁路运输公司,安徽 马鞍山 243021)
工业铁路车辆位置跟踪方法
程磊1,陈峰1,徐劲松2,董炜3
(1.合肥工业大学 计算机与信息学院,安徽 合肥230009; 2.马钢(合肥)钢铁有限责任公司,安徽 合肥230000; 3.马鞍山钢铁股份有限公司 铁路运输公司,安徽 马鞍山243021)
摘要:在企业内部的工业铁路运输中,车辆位置信息是运输组织调度的基础。为满足企业运输管理的自动化、信息化,文章以工业铁路运输物流智能调度系统生成的铁路运输行车作业计划为依据,提出了一种软件形式的车辆位置跟踪算法,实现了对工业铁路车辆位置的跟踪。
关键词:铁路运输;物流管理;智能调度;车辆位置跟踪
0引言
当前,我国冶金、石化、煤矿、港口、码头等重点行业领域物品的运输量非常大,铁路运输是这些大型企业内部运输的重要形式,而车辆位置信息是企业内部铁路运输组织调度的基础。目前对工业铁路运输车辆的位置跟踪采用的方法主要有以下几种:① 原始的人工管理方式,每天24 h不停地跟踪记录庞大的、动态变化的物流信息;但由于人为疏忽和误操作,经常不能实时、准确地掌握站场的物流信息,从而给下一步作业带来了困难,甚至使整个作业不能顺利继续进行[1-2];② 采用轨道电路的方式,依靠检测车轮造成轨道之间的短路来检测轨道上是否有车占用,但这种方式只能够检测轨道是否被车辆占用,无法检测出车辆的数量和具体是哪一辆或几辆车;③ 采用GPS全球定位系统[3],对于内部有数千辆车的较大型企业,这种方式投资较大,而且车载设备的供电问题较难维护,而GPS的民用定位精度不够精确,容易误判到其他股道,另外这种方式对于由路局进入企业的非本企业车辆无法定位;④ 安装采用射频识别技术开发的车号自动识别系统[4],在每辆车上加装RFID电子标签,在所有停放线股道两端安装车号自动识别系统[5],但这种方式投资巨大,一般企业很难承受。
因此,迫切需要一种技术以较低成本实现对工业铁路运输车辆及时准确的位置跟踪[6]。本文以工业铁路运输物流智能调度系统生成的铁路运输行车作业计划为依据,提出了一种软件形式的车辆位置跟踪算法,实现了对工业铁路车辆位置的及时、准确跟踪,而且实现方式简单,降低了生产成本。
1定位跟踪的系统设计
工业铁路运输物流智能调度系统提供了一种新的工业铁路运输车辆位置跟踪方法,该方法采用计算机、网络与通信、数据库等多种理论与技术,通过软件算法,以工业铁路运输物流智能调度系统生成的铁路运输行车作业计划为依据,实现对工业铁路车辆位置的跟踪定位。
1.1系统的物理拓扑结构
工业铁路运输物流智能调度系统由智能调度计算机、物流管理计算机、信号系统计算机、物流管理服务器、物流管理数据库、ERP接口数据库、铁路机车安控系统、车号识别系统等组成[7]。系统的拓扑结构如图1所示。
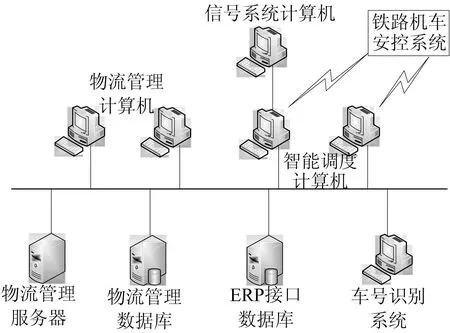
图1 系统的物理拓扑结构
智能调度计算机与信号系统计算机之间通过通讯线连接,采用RS232通讯;智能调度计算机、物流管理计算机、物流管理服务器、物流管理数据库、ERP接口数据库、车号识别系统等各计算机与服务器之间通过以太网通讯线连接;智能调度计算机与铁路机车安全监控系统通过无线方式通讯[8]。
物流管理计算机负责对车流和物流进行跟踪,维护现车与物流信息;智能调度计算机结合物流管理数据库的现车与物流信息、ERP接口数据库的各装卸进度信息、库房料场的信息以及信号系统计算机的作业计划完成信息自动生成调度作业计划,并传送给信号系统计算机和铁路机车安全监控系统;物流管理计算机负责进出厂作业、装卸车作业、基础数据维护、运输生产计划维护、统计、查询等;信号系统计算机负责按照智能调度计算机生成的调度作业计划开放进路,执行调度作业计划,并将执行结果反馈给物流管理计算机;铁路机车安全监控系统接收智能调度计算机生成的调度作业计划,并将其传送给机车司机与调度员,指导其进行作业,同时将机车安全监控系统计算机的车列长度信息传送给智能调度计算机和物流管理计算机,用于复核实际作业情况是否与调车作业计划相符;车号识别系统负责监测进出厂车辆的车号与时间。
1.2系统的逻辑功能结构
智能调度系统的逻辑功能结构如图2所示。
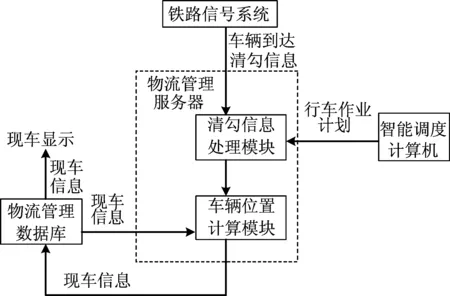
图2 系统的逻辑功能结构
由智能调度计算机生成的铁路运输行车作业计划的执行方式如下:将生成的铁路运输行车作业计划发送到信号系统计算机,由信号系统计算机根据接收到的铁路运输行车作业计划自动选排进路、开放进路,并根据车辆的行驶、到达情况自动实现清勾确认,并将确认信息反馈到清勾处理模块中。清勾处理模块接收铁路信号系统的车辆到达清勾信息,同时读取智能调度计算机生成的相应的行车调度作业计划,由车辆位置计算模块根据以上信息并结合实时的现车信息进行车辆位置的重新计算,生成最新的现车信息并更新物流管理数据库中的数据,显示到相关系统中,从而实现车辆位置的跟踪定位。
2定位跟踪算法
本文方法是根据行车作业计划及信号系统等进行车辆定位与跟踪,车辆位置跟踪需对每辆车皮确定一个车号,智能调度系统在系统启动时需要进行站场初始化工作,将当时站场中每个车辆在股道上的顺序位置录入到系统,这些车号信息供后续对车辆定位跟踪使用。在系统运行过程中还有进、出站的车辆,这些车辆的车号由安装在站场进出口的车号识别系统自动检测并上报给调度系统。
铁路信号系统将车辆到达股道的清勾信息写入物流管理数据库中,跟踪的实时现车信息也保存在物流管理数据库中。物流管理服务器以2 s为周期对行车作业计划清勾确认信息进行检测,当发现有未处理的信息时,通过定位算法对车辆位置跟踪,其中清勾处理模块接收铁路信号系统的车辆到达清勾信息,同时读取智能调度计算机生成的相应的行车调度作业计划,由车辆位置计算模块根据以上信息并结合实时的现车信息进行车辆位置的重新计算,实现车辆的位置跟踪,并生成最新的现车信息更新物流管理数据库中的数据,显示到相关系统中。其中,定位算法是车辆位置计算模块的核心。
2.1定位模型和数据结构
线性表是最基本、最简单、最常用的一种数据结构。线性表中数据元素之间的关系是一对一的关系,即除了第1个和最后一个数据元素之外,其他数据元素都是首尾相接的。线性表的逻辑结构简单,便于实现和操作[9],因此是广泛采用的一种数据结构。在实际应用中,线性表都是以栈、队列、字符串等特殊线性表的形式来使用的。
线性表是线性结构,它是一个含有n≥0个结点的有限序列,对于其中的结点,有且仅有1个开始结点,没有前驱但有1个后继结点;有且仅有1个终端结点,没有后继但有1个前驱结点;其他的结点都有且仅有1个前驱和1个后继结点。一般地,一个线性表可以表示成一个线性序列:k1,k2,…,kn,其中k1是开始结点,kn是终端结点。
工业铁路在运输调度过程中,不论是挂车操作还是摘车操作,都是在股道和车列的两端进行,不能隔车操作,因此调度可以模拟成类似线性操作,由此可以将车辆位置的跟踪问题转化为线性表的问题。
本文将股道和车列抽象为线性结构,车辆抽象为该线性结构中的组成元素。对于在股道上的车辆,从左到右其车辆的序号Seq从1~n以整数递增编号;对于车列中的车辆,若其在机车右侧,则从左到右车辆的序号Seq从1~n以整数递增编号,若其在机车左侧,则从右到左车辆的序号Seq从-1 ~-n以整数递减编号。股道与车组模型,如图3所示。
根据图3模型,设置2种车辆位置:① 股道上,以股道号表征其位置,包括装车线、卸车线、停放线、走行线、联络线等,不包括有岔区段等行车线路;② 车列中,以机车号表征其位置。车辆需要记录自身位置信息,包括位置类型RL(股道上/车列中)、位置RLid (股道号/机车号)和序号Seq。

图3 股道和车组模型
清勾处理模块接收物流管理服务器检测到的清勾信息,同时读取智能调度计算机生成的相应的行车调度作业计划,由车辆位置计算模块根据以上信息并结合实时的现车信息进行车辆位置的重新计算。清勾信息的数据结构见表2所列。

表2 行车作业计划勾包含的信息
其中计划勾中的作业方式分为3种不同类型,分别为:① 挂车作业,符号“+”;② 摘车作业,符号“-”;③ 通过作业,符号“○”。
2.2定位算法设计
设清勾信息为:机车号Lid,股道号Rid,作业方式W,作业车辆数Tn,作业方向Wd,摘勾方向Pd。假设Rid股道上有K(K>0)辆车,机车Lid左边带M(M>0)辆车,右边带N(N>0)辆车,定位算法设计思路如下:
(1) 当W==‘+’ 且Wd==‘左’,对于所有满足RL==‘R’且RLid==Rid,Seq≤Tn的车辆,改变车辆位置RL:=‘L’且RLid:=Lid,Seq:=N+Seq;对于所有满足RL==‘R’且RLid==Rid,Seq>Tn的车辆,改变车辆位置Seq=Seq-Tn。
(2) 当W==‘+’且Wd==‘右’,对于所有满足RL==‘R’且RLid==Rid,Seq>K-Tn的车辆,改变车辆位置RL:=‘L’且RLid:=Lid,Seq:=-M-(K-Seq+1)。
(3) 当W==‘-’且Pd==‘左’,对于所有满足RL==‘L’且RLid==Lid,Seq≤Tn-M的车辆,改变车辆位置RL:=‘R’且RLid:=Rid,Seq:=K+M+Seq+1。
(4) 当W==‘-’且Pd==‘右’,对于所有满足RL==‘R’且RLid==Rid的车辆,改变车辆位置Seq:=Seq+Tn;对于所有满足RL==‘L’且RLid==Lid,Seq>N-Tn的车辆,改变车辆位置RL:=‘R’且RLid:=Rid,Seq:=Seq-(N-Tn)。
3特点分析
由于物流运输量越来越庞大,目前的一些铁路车辆位置跟踪技术,均存在一定的问题,不适宜在企业内进行推广。现在的系统作业方式与以前的手工作业方式的对比说明如图4所示。

图4 特点分析
与其他车辆定位系统相比,本文提出的基于物流智能调度系统的车辆位置跟踪方案有以下几点改进:
(1) 进一步降低了企业铁路现场人员劳动强度。降低劳动强度、保障作业安全一直是我国企业铁路现代化所追求的目标,特别是实现物流信息的自动跟踪进一步简化了作业过程,并取代了部分人工作业环节,减少了人为因素对作业效率的影响。
(2) 实时、准确地跟踪车辆信息。通过自动化的智能系统代替手工作业,优化了综合自动化系统的结构,提高了信息的正确率和及时性,并且可根据需要实时统计全站各场及各股道的现车数,便于调度人员或车站值班员随时掌握全站车辆的动态信息。
(3) 不仅简化了企业生产运输的流程,实现了对业务流程的优化,更有效保证了运输生产过程的安全性和可靠性,实现了物流管理和物流的运输过程控制,使得企业铁路运输物流成为一个整体。
4结束语
本文在车辆位置跟踪的基础上,系统地通过物流管理计算机实现对管辖区域车辆的管理、车辆装卸作业的管理,根据实际作业进程实现对车辆状态的维护管理,及时、准确地实现铁路运输车辆位置的跟踪,为工业铁路物流运输组织提供调度基础。
该系统已经在马鞍山钢铁公司等多家冶金企业完成部署工作,并正式运行,有效验证了系统的可操作性和应用价值。
[参考文献]
[1]张红麟.铁路信息化建设的核心:TMIS[J].计算机系统应用,2003(7):9-12.
[2]王麟书.中国铁路信息化事业的发展[J].铁路计算机应用,2002,11(6):31-34.
[3]宋保林.基于GPS的货物跟踪系统的研究[D].西安:长安大学, 2008.
[4]万九生.车号自动识别系统在企业铁路运输中的应用探讨[J].山西冶金,2001(3):58-61.
[5]孟祥忠,张志刚,李宗明.基于RFID技术的矿井运输车辆定位跟踪监控系统研究[J].中国煤炭,2012, 38(4):61-64.
[6]韩富春.冶金企业物流系统现状分析及发展对策探讨[J].物流技术,2003(12):100-102.
[7]魏臻,侯前进,程磊,等.企业铁路运输物流自动跟踪系统的研究与设计[J].合肥工业大学学报: 自然科学版,2005,28(11):1365-1368.
[8]杨立民,胡庆新.铁路信号计算机联锁系统的研究与设计[J].微计算机信息, 2000(2):16-18.
[9]严蔚敏,吴伟民.数据结构[M].北京:清华大学出版社,2007:18-63.
(责任编辑胡亚敏)
Research on the method of tracking vehicle location of industrial railway
CHENG Lei1,CHEN Feng1,XU Jin-song2,DONG Wei3
(1.School of Computer and Information, Hefei University of Technology, Hefei 230009, China; 2.Ma’anshan Iron and Steel(Hefei) Co., Ltd., Hefei 230000, China; 3.Railway Transportation Company, Ma’anshan Iron and Steel Co., Ltd., Ma’anshan 243021, China)
Abstract:Vehicle location information is the foundation of the transportation organization and scheduling within the enterprise railway transportation. For the automation and informatization of enterprises’ transportation management, an algorithm to trace the vehicle position is proposed, which is based on railway transportation operation plan generated by intelligent dispatching system of industrial railway transportation. The vehicle location of industrial railway can be tracked by this algorithm.
Key words:railway transportation; logistics management; intelligent scheduling; vehicle location tracking
中图分类号:TP311
文献标识码:A
文章编号:1003-5060(2016)02-0190-04
Doi:10.3969/j.issn.1003-5060.2016.02.009
作者简介:程磊(1971-),男,安徽颍上人,合肥工业大学副研究员,硕士生导师.
基金项目:国家国际科技合作专项资助项目(2014DFB10060)
收稿日期:2015-01-17;修回日期:2015-12-15
