永磁同步电机控制系统仿真与试验
2016-04-11林加堃涂群章段克军
林加堃,涂群章,段克军,陆 凯,邹 珊
(1.解放军理工大学 a.野战工程学院; b.训练部,南京 210007;
2.南京军区浙江省军区 73237部队,宁波 315000)
永磁同步电机控制系统仿真与试验
林加堃1a,涂群章1a,段克军1a,陆凯2,邹珊1b
(1.解放军理工大学a.野战工程学院; b.训练部,南京210007;
2.南京军区浙江省军区 73237部队,宁波315000)
摘要:以电传动工程机械用永磁同步电机为研究对象,运用现代控制理论、永磁同步电机矢量控制和弱磁控制策略实现对电机的控制,建立仿真模型,构建了电机测试台架,利用该测试台架进行了试验。仿真和试验结果表明,该电机控制系统具有良好的动、静态特性,为研究电传动工程机械用永磁同步电机高性能控制奠定理论和试验基础。
关键词:电传动工程机械;永磁同步电机;仿真模型;测试台架;性能测试
Citation format:LIN Jia-kun, TU Qun-zhang, DUAN Ke-jun, et al.Simulation and Experiment of Permanent Magnet Synchronous Motor Control System[J].Journal of Ordnance Equipment Engineering,2016(2):150-153.
在工程机械领域,随着对机械结构底盘空间布置、控制精确度、能源利用率以及维修保养等方面的要求越来越高,相比于传统的机械传动形式,电传动技术越来越凸显其优势,采用高性能的电传动结构和伺服电机系统成为工程机械发展的一个必然趋势[1]。作为电传动工程机械的核心之一,永磁同步电机具有体积小、质量轻、转子无发热问题的特点,同时电机内含的永磁体提供励磁,没有励磁损耗,具有效率高、功率密度大、控制精度高等优点,因此,从当今世界电传动的研究情况[2]和电机发展水平[3]来看,永磁同步电机是电传动工程机械的最佳选择。
本研究运用PID控制理论[4]和永磁同步电机矢量控制原理[5-6],构建速度-电流双闭环系统实现对电机的调速控制。通过在MATLAB中建立永磁同步电机控制系统的仿真模型,对电机控制系统进行仿真分析,在构建的电机测试台架上对电机控制系统进行性能测试,以此来检验永磁同步电机控制性能,为研究该类电机高性能控制提供了依据。
1控制系统仿真模型的建立
对电传动工程机械用永磁同步电机控制的要求是:基速以下工作在恒转矩工作区,基速以上工作在恒功率工作区。因此控制方案采用磁场定向矢量控制与弱磁控制[7],即电机在基速以下运行时,使定子电流的励磁分量isd=0,通过控制直流量isq来控制转矩;超过基速时,负向增大isd的电流值,在保持电机的输出电压不变的情况下调速。
在Matlab中,利用Simulink和SIMSCAPE的块图模型建立永磁同步电机控制系统的仿真模型。本研究主要以正弦波永磁同步电机为研究对象,电机控制系统主电路由模块直流电源DC、逆变器和永磁同步电机组成[8],反馈回路为具有速度调节和电流调节的双闭环回路,仿真模型如图1所示。

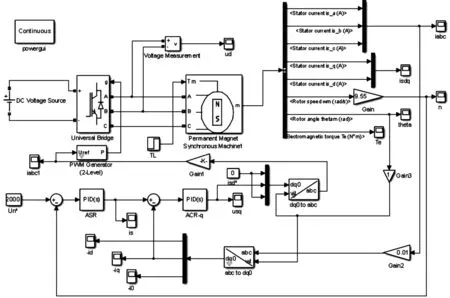
图1 永磁同步电机控制系统仿真模型
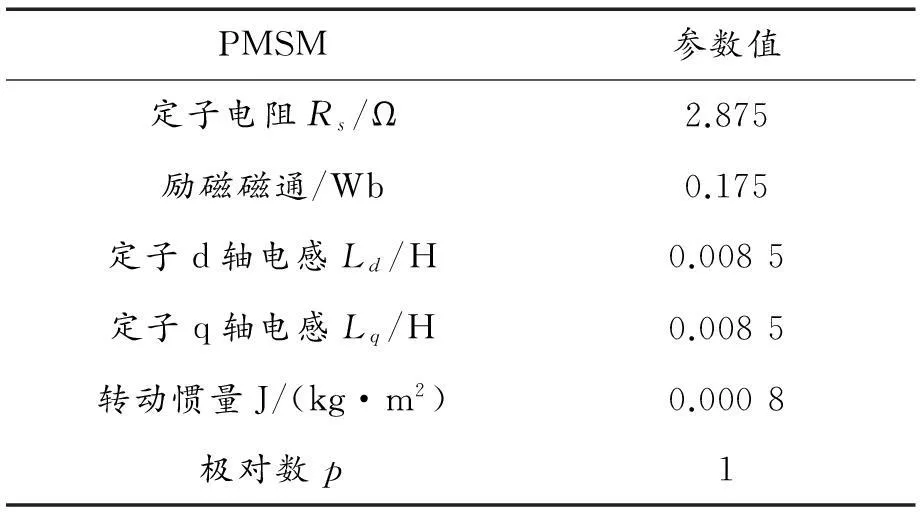
PMSM参数值定子电阻Rs/Ω2.875励磁磁通/Wb0.175定子d轴电感Ld/H0.0085定子q轴电感Lq/H0.0085转动惯量J/(kg·m2)0.0008极对数p1
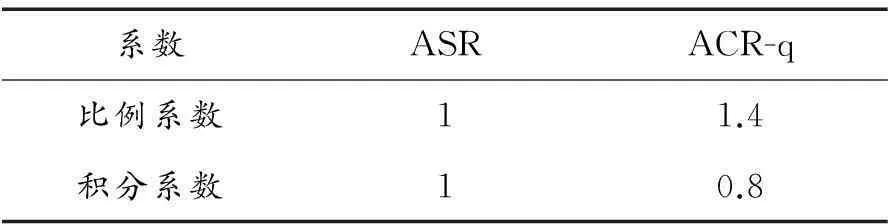
表2 转速调节器ASR和电流调节器ACR-q参数
2电机调速控制仿真分析
模型的仿真分析结果如图2(a)~图2(f)所示。其中,图2(a)为转速响应,电机空载启动,经过0.02 s的升速,转速迅速稳定在给定转速2 000 rad/s,在0.1 s时刻加载到2 N·m,转速围绕给定值稍有波动;图2(b)为转矩响应,电机刚开始运转时转矩波动较大,0.03 s后转矩在Te=0处趋于稳定,在0.1 s时刻加载后,转矩在2 N·m处出现振荡;图2(c)为定子电流励磁分量id和转矩分量iq,可以看出,其动态过程与转矩响应相类似,加载后转矩分量iq比励磁分量id振荡更明显;图2(d)~图2(f)分别为三相定子电流波形,可以看出,电流波形图基本符合正弦波理论。仿真分析结果表明,该电机控制系统加速性能良好,运行稳定,具有较好的特性[9]。
3电机测试台架的构建
电机测试台架的系统原理示意图如图3,实物图如图4。电机测试台架主要由交流电力测功机、西门子变频器、测控仪、转矩转速传感器、永磁同步电机、380V直流电源、电机控制器、功率分析仪以及琴台式操作台组成。电力测功机可以作为电机的负载,测量电机轴上的输出转矩,也可作为直流发电机运行,拖动电机运转,测量其轴上输入转矩;测控仪、电力测功机和转矩转速传感器等配套组成整个测控系统,完成电机转矩和转速的机械参数测量;功率分析仪则用于测量电机的电参数,如电压、电流等。实验时,所有的指令均可以从琴台式操作台发出,该操作台上的控制面板嵌有测控仪,测试台架严格按照操作台与测控仪、测控仪与变频器之间CAN总线通讯协议编写。
4电机性能测试及结果分析
为了检验永磁同步电机控制系统的性能,并验证测试台架的实用性,在构建的测试台架上进行永磁同步电机控制系统试验研究。结合电传动工程机械驱动电机参数匹配情况[10]和实际工况,设定的电机性能参数见表3所示。
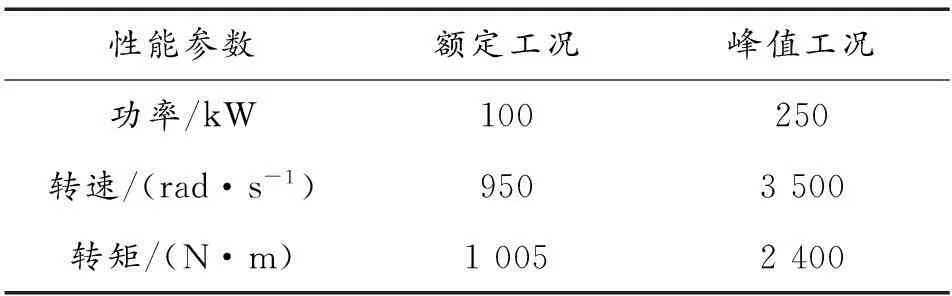
表3 永磁同步电机性能参数
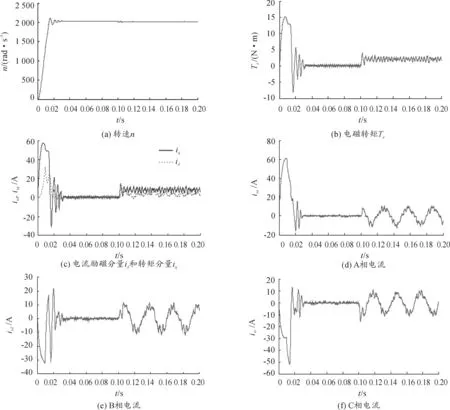
图2 正弦波永磁同步电机控制系统仿真波形
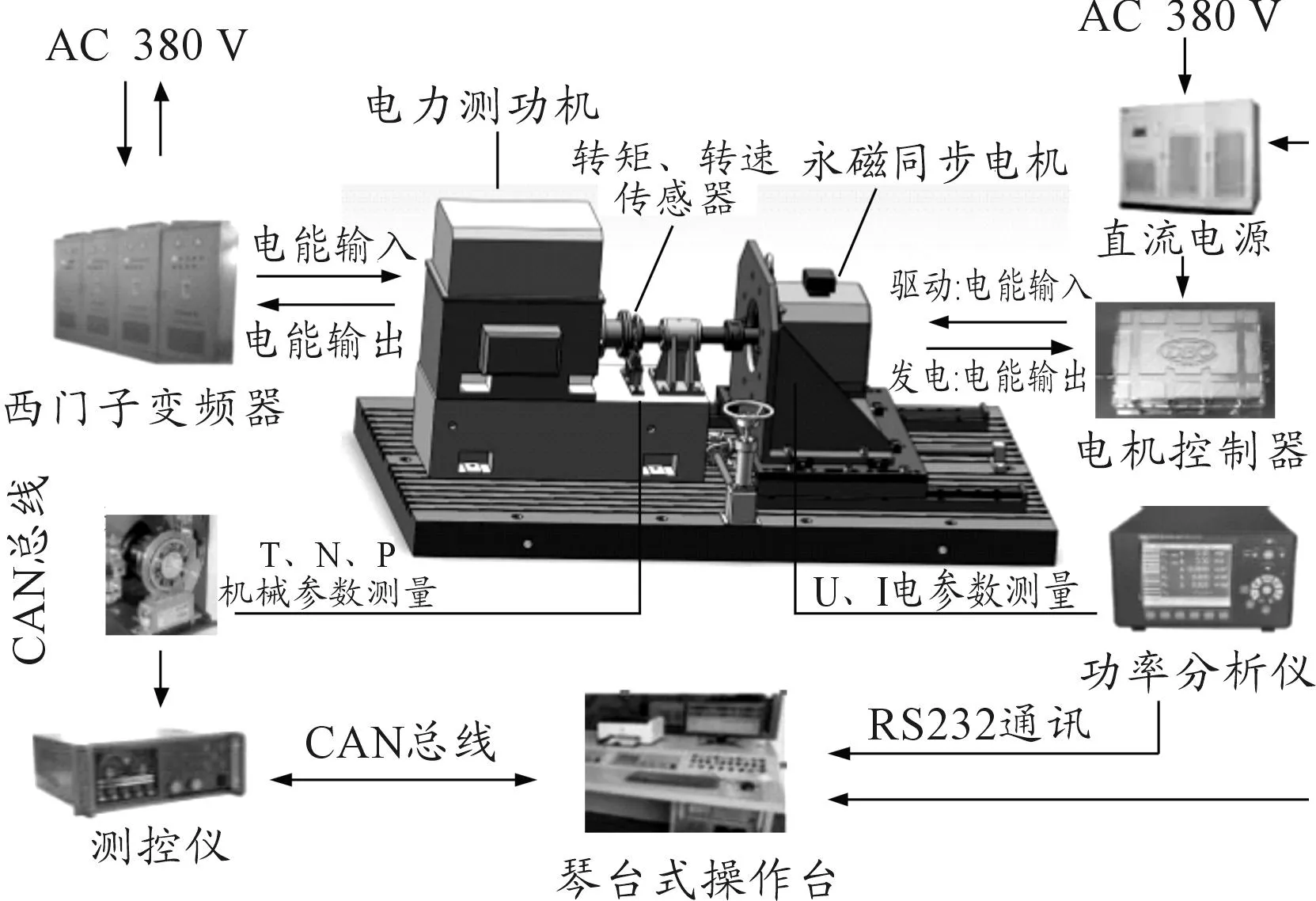
图3 电机测试台架系统原理示意图
模拟工程机械加速工况,进行加速性能测试,当其速度从0升至最高行驶速度时,对应的电机转速从0升至3 500 rad/s。考虑到加速工况下电机功率需求[11]以及加速过程中加速阻力等各种实际阻力的影响,假设电机负载为616 N·m[12],测试步骤如下:
1) 设定电力测功机运行模式为恒转矩模式,阶跃转速为3 500 rad/s,电机负载转矩为616 N·m,电机由静止开始运转,记录电机转速值;
2) 将电机负载改为空载,其他设定保持不变,记录电机转速值;
3) 采集两组试验数据,绘制电机加速特性曲线,如图5所示。
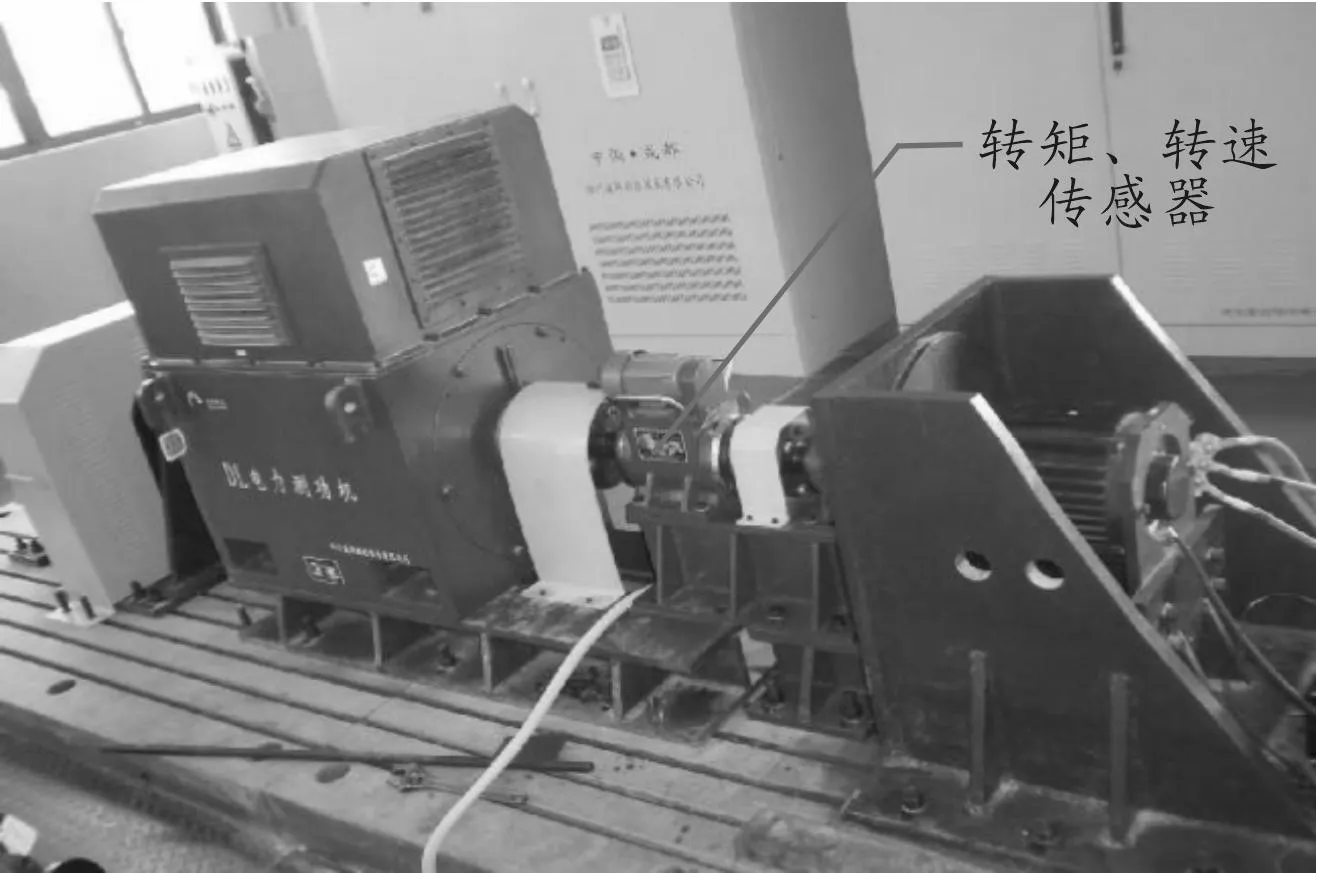
图4 电机测试台架实物图
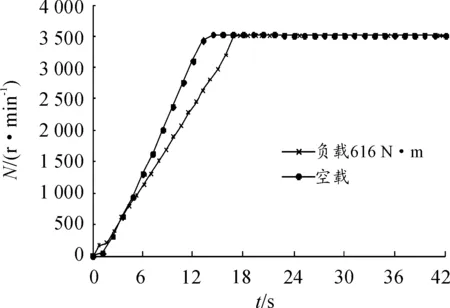
图5 PMSM加速特性曲线
从图5中可以看出,永磁同步电机控制系统在负载条件下和空载条件下,都能快速平稳地达到目标转速。空载运行时,电机约在14.4 s达到稳态;负载运行时,电机约在16.8 s达到稳态,相比较空载条件下的响应,负载条件下的响应稍微滞后。总体而言,该电机控制系统加速性能良好,较好地实现了瞬态调速,转速控制精度高。
模拟工程机械作业工况,进行加载性能测试。电机空载启动,设定转速为额定转速950 rad/s,电机运转稳定后,给电机施加一个1 000 N·m的阶跃负载,记录电机转矩值和转速值。采集试验数据,绘制电机加载特性曲线,如图6所示。
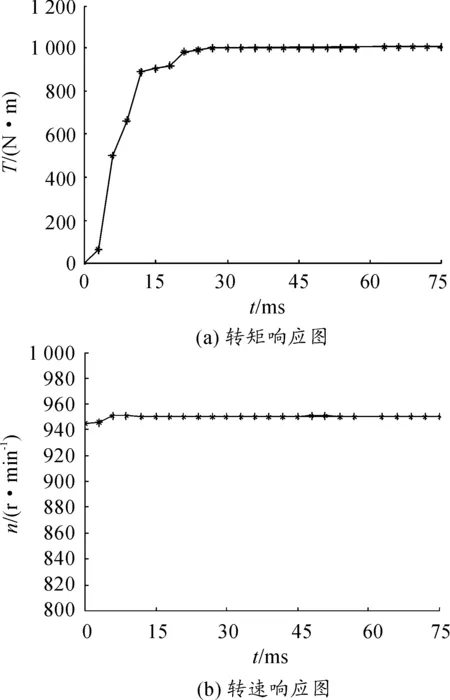
图6 PMSM加载特性曲线
从图6(a)转矩响应图可以看出,电机转矩约在27 ms处达到目标值1 000 N·m,响应时间短,转矩可控性强;从图6(b)转速响应图可以看出,当电机处于稳定运转状态时突然加载,电机转速值仅在很短时间(约为6 ms)内发生波动就恢复稳定,表明该电机控制系统具有较强的抗干扰性。
5结束语
驱动电机及其控制技术是电传动工程机械的关键技术之一,永磁同步电机因其优势而广泛应用于低速大转矩、高速恒功率、负载波动频繁的电传动工程机械已成为必然趋势,因此,研究永磁同步电机及其控制系统对于研发电传动工程机械具有重大意义。本研究运用现代控制理论和永磁同步电机控制策略,建立电机控制系统,依托Matlab软件和测试台架进行仿真分析和试验研究,结果表明,该电机控制系统具有良好的动、静态特性,为研究电机的高性能控制奠定基础,仿真和试验结果为不断完善和优化电机控制算法,实现对电机快速、精确、高效控制提供了依据。
参考文献:
[1]张德恩,邹少军.军用推土机的发展分析[J].工兵装备研究,2013,25(4):6-10.
[2]张欲保,熊为水.军用工程机械的发展、分析与未来[J].交通世界,2010(10):40-48.
[3]廖自立,马晓军,臧克茂,等.履带装甲车辆电传动用电机系统比较研究[J].微特电机,2012(4):11-13.
[4]王成元,夏加宽,孙宜标.现代电机控制[M].北京:机械工业出版社,2013.
[5]王晓明.电动机的DSP控制—TI公司DSP应用 [M].2版.北京:北京航空航天大学出版社,2009.
[6]周雅夫,连静,李骏,等.基于矢量控制的混合动力汽车电机控制器设计[J].汽车电器,2013(7):1-6.
[7]王艾萌.内置式永磁同步电机的优化设计及弱磁控制研究[D].河北:华北电力大学,2010.
[8]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2010.
[9]SEOK J K,KIM J S,SUL S K.Overmodulation strategy for high-performance torque control[J].IEEE Transactions on Power Electronics,1998,13(4):786-792.
[10]孙逢春,陈树勇.履带车辆感应电动机驱动系统匹配理论[J].机械工程学报,2008(11):260-266.
[11]张兴春,张幽彤,黄文卿.车用内置式永磁同步电机过调制弱磁算法[J].北京理工大学学报,2013(9):925-928.
[12]KWON TAE SUK,CHOI GI YOUNG,KWAK MU SHINET,et al.Novel flux-weakening control of an IPMSM for quasi-six-step operation[J].IEEE Transactions on Industry Applications,2008,44(6):1722-1731.
(责任编辑杨继森)
Simulation and Experiment of Permanent Magnet Synchronous Motor Control System
LIN Jia-kun1a, TU Qun-zhang1a, DUAN Ke-jun1b, LU Kai2, ZOU Shan1b
(1.a.College of Field Engineering; b.Training Command, PLA University of Science & Technology,Nanjing 210007, China; 2.The No.73237thTroop of Zhejiang Provincial Military Region,Nanjing Military Region, PLA, Ningbo 315000, China;
Abstract:Taking the permanent magnet synchronous motor (PMSM) for electric-drive construction machinery as the research object, the control of PMSM was realized by the use of modern control theory, PMSM vector control and flux-weakening control strategy. The simulation model was established and a test bench of PMSM was built. Finally PMSM control system was tested on the bench. The results of simulation and experiment show that PMSM control system has good dynamic and static characteristics. The research provides the theoretical and experimental basis for the study of PMSM control for electric-drive construction machinery.
Key words:electric-drive construction machinery; permanent magnet synchronous motor; simulation model; test bench; performance testing
文章编号:1006-0707(2016)02-0150-04
中图分类号:TM301.2
文献标识码:A
doi:10.11809/scbgxb2016.02.036
作者简介:林加堃(1991—),男,硕士研究生,主要从事机电一体化研究。
收稿日期:2015-06-11;修回日期:2015-06-30
本文引用格式:林加堃,涂群章,段克军,等.永磁同步电机控制系统仿真与试验[J].兵器装备工程学报,2016(2):150-153.
【信息科学与控制工程】
