驾驶员转向操纵时上肢肌肉力学特性仿真*
2016-04-11高振海王德平王彦会
高振海,范 达,王德平,程 悦,王彦会
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130022; 2.中国一汽新能源汽车分公司,长春 130122;3.中国第一汽车集团公司技术中心,长春 130011)
2016008
驾驶员转向操纵时上肢肌肉力学特性仿真*
高振海1,范 达1,王德平2,程 悦3,王彦会3
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130022; 2.中国一汽新能源汽车分公司,长春 130122;3.中国第一汽车集团公司技术中心,长春 130011)
从人体生物力学和运动控制角度出发,分析驾驶员进行汽车转向操控时上肢骨肌的动作规律,并基于人体生物力学软件实现了驾驶员转向操纵动作的逆向动力学仿真,得到了典型转向工况下驾驶员上肢各部分肌肉的激活程度,并采用相关性分析方法确定了三角肌肩胛部等产生转向力矩的上肢主要工作肌群。研究结论为在汽车转向性能设计中考虑驾驶员骨肌力学特性,并精准确定主要工作肌群提供了依据。
驾驶员;转向操纵;上肢肌肉;逆向动力学;骨肌力学特性
前言
驾驶员操纵行为特性研究虽然在20世纪60年代即开始理论探索,但前期开展的驾驶员行为研究大多是建立汽车方向与速度的控制行为模型,其实质是利用自动控制理论建立了一个自动控制器且直接用转向盘转角、加速踏板或制动踏板行程来描述驾驶员的运动控制行为[1],并没有从人类运动控制行为、心理学、生理学和人体生物力学角度出发分析驾驶员操纵动作输出的实际产生过程及其骨肌运动控制机理。
驾驶员操纵汽车是由其骨肌力学系统在中枢神经的支配下完成的一种人体运动控制行为。近年来,涵盖人类躯体运动控制、神经生理学、生理学、物理学和生物力学等多学科技术的驾驶员运动控制行为研究成为了国际汽车工程领域乃至人因工程领域的学术热点和理论前沿。文献[2]中研究了驾驶员速度控制行为中腿部肌电信息变化特性。文献[3]~文献[5]中引入了肌电分析方法,分析了驾驶员转向操纵过程中动作机理,建立了基于简单神经肌肉力学特性的驾驶员转向操纵模型。文献[6]和文献[7]中对驾驶员转向操纵时肌肉活动变化进行定量分析,提出利用肌电信息测量转向效率的方法。在对驾驶员生理特性规律研究的基础上,众多学者开展了利用驾驶员或乘员的生理特征参数进行车辆性能评价的研究,并已成为学术研究热点。文献[8]中利用驾驶员表面肌电信号对车辆驾驶性能进行了评价。文献[9]中采集了乘员颈部、背部和腰部肌肉的肌电信号,以肌肉活动作为乘员应对侧向加速度时舒适度评价客观指标。文献[10]中利用驾驶员人体骨肌系统模型,对比分析了不同座椅属性对驾驶员舒适性的影响。吉林大学汽车仿真与控制国家重点实验室长期开展驾驶员的前视预瞄跟随行为、多目标轨迹决策和自学习控制行为研究,自2010年以来,与中国第一汽车集团公司技术中心等部门合作,尝试探索驾驶员操控汽车行驶的运动控制机理及其心理与生理学指标测试,并将其应用到汽车转向、制动和平顺性等行驶性能的驾驶员主观感觉的客观化评价上。在2013年实施的测试真实驾驶员肌肉力学特性的汽车转向性能试验中发现:由于人体上肢肌肉多达数十块,国际现有的人体生理记录仪无法实时同步采集上肢所有肌肉信息。而就人体生物力学理论而言,人体运动控制是由众多相关肌肉协同作用下主要工作肌群的力学响应,研究中也无需对所有肌肉都进行分析,而只需关注活动程度较大的肌肉或主要工作肌群。
为此,针对以上问题并结合驾驶员施加的汽车转向操控这一骨肌动作特点的分析,建立了模拟驾驶员施加转向操纵动作、全面分析人体上肢各块骨肌动力学特性的人体上肢生物力学仿真模型,并以典型转向操纵工况为例,分析了转向动作下驾驶员上肢肌肉激活程度,最终采用相关性分析方法确定了实际产生转向力矩的人体上肢主要工作肌群,为考虑驾驶员运动控制行为特性的汽车转向性能设计与转向助力特性的场地试验调校提供了理论基础、设计数据支撑和试验测试方法指导。
1 驾驶员转向操纵下人体上肢骨肌生物力学特性的理论分析
根据人体生物力学理论[11],人体运动控制系统主要是由骨骼、关节、肌肉3大部分组成。通常情况下,人体运动是以关节为支点,通过附着于骨面上的骨骼肌收缩,牵拉骨骼改变位置而产生的。运动过程中,骨骼起杠杆作用,关节起枢纽作用,骨骼肌则是运动的动力源。
驾驶员转向操纵动作是由上肢肌肉直接完成的。表1为人体上肢肌肉分布列表[12],其转向操纵动作的主要运动关节是肩关节和肘关节。

表1 人体上肢肌肉分布
1.1 转向操纵时肩关节运动特性分析
肩部运动包括前举、伸展、外展和内外旋。就转向操纵动作而言,主要是前举、外展和内外旋3个动作。
前举是沿肩胛骨平面的上举,主要由三角肌提供必要的力矩。由于盂肱关节的骨性稳定度不高,某一主动肌产生的力需要拮抗肌激活,从而不会产生使关节脱位的力。因此,前举动作中维持关节的稳定性主要由冈上肌、冈下肌和背阔肌完成。
外展是沿冠状面的抬举,主要由三角肌提供必要的力矩。同时肩胛下肌较为活跃,并以离心收缩达致关节稳定。
内外旋是手臂在收位时肱骨的旋转,主要由冈下肌、三角肌、肩胛下肌和胸大肌完成。
1.2 转向操纵时肘关节运动特性分析
肘部运动主要包括伸肘、屈肘、旋前和旋后。
伸肘时肱三头肌内侧头活跃,肱三头肌外侧头和长头是第二伸肌。二头肌在前臂完全旋后时比旋前时更活跃。肱肌在整个屈肘的过程中活跃,是主要工作肌群。由于拉伸反射的特点,肱三头肌活性随着屈肘的增加而增加[11]。
根据以上对转向操纵动作的人体生物力学和骨肌力学特性理论分析,初步选定了三角肌肩胛骨部、三角肌锁骨部、冈下肌、冈上肌、背阔肌、肩胛下肌、胸大肌锁骨部、胸大肌胸骨部、肱三头肌长头、肱三头肌侧头、二头肌和肘肌等12类肌肉为转向操纵的主要工作肌群。
2 面向驾驶员转向动作的人体骨肌动力学建模
本文中采用国际人体生物力学仿真软件Anybody提供的基础人体骨肌模型,并面向驾驶员转向操纵行为仿真进行了二次开发。
Anybody软件提供的基本人体模型为站立姿态下人体骨肌动力学模型。该模型包括刚性骨骼、关节和具有生理学性质的肌肉和肌腱的组合,可以仿真分析人体的完整骨肌系统及其在各种特定工作环境下人体所有骨骼、肌肉、关节的受力和变形,肌腱的弹性性能,拮抗肌作用等[13]。
为分析驾驶员转向操纵动作引发的人体骨肌动力学特性变化,对以上基本人体模型进行了二次建模开发,最终搭建的骨肌模型如图1所示。其中重点调整设置了人体模型的整体尺寸、骨骼和肌腱的几何外形尺寸等人体几何参数与各体节坐标点、运动部位、运动方式、路径和时间历程等人体运动参数。具体细节如下。
(1) 添加了座椅体节,并将人体姿态从原有的站立姿态调整为坐姿。
对原有站姿人体模型的髋关节和膝关节角度进行调整,在人体模型的头部、躯干、下肢和脚部与座椅体节的头枕、靠背、座椅支撑面和脚垫之间,分别建立了线性约束,形成驾驶员坐姿。
(2) 添加了转向盘体节,并定义了驾驶员把握转向盘的姿态。
模型的坐标原点定义在人体身躯干线与大腿的铰链点处,即人机工程学中定义的H点。在建模过程中,首先测量转向盘Y轴与H点之间距离和转向盘倾斜角度;然后根据测得参数,在模型中添加转向盘体节。模型中手部位置定义为参考点,与转向盘持握点以球铰方式连接,把握姿势为“9点钟-3点钟”方向。
(3) 设置了各骨肌关节自由度。
由于模型中增加了约束,造成人体整个骨肌模型存在过约束问题,需要释放并设置部分关节的运动自由度,如盂肱关节的外展、肘关节的内外旋和腕关节的桡偏等。
(4) 修改了人体模型的尺寸比例。
原有模型中的人体整体尺寸和骨肌特征参数参照欧洲人体体征。本文中根据GB 10000—88中国成年人人体尺寸,并采用第95百分位中国成年男性的人体尺寸(身高178.9cm,体质量70kg)对原有模型进行了修改[14]。

图1 驾驶员转向动作的骨肌模型
3 典型转向工况下驾驶员上肢肌肉力变化特性仿真分析
3.1 典型转向工况设计
选择GB/T 6323.1—94汽车操纵稳定性试验中的蛇行试验工况,并进行了车速为60km/h时的驾驶员转向操纵动作仿真[6]。
该工况的仿真输入条件为:骨肌模型的转向盘转角输入以正弦变化,转角幅值为单侧60°,频率为0.25Hz;转向力矩输入同样按正弦变化,幅值和频率分别为5N·m和0.25Hz;仿真时间为8s,步长为0.1s。
3.2 上肢肌肉力的动态变化与主要工作肌群定位
在仿真分析中,重点分析了肌肉激活程度。所谓肌肉激活程度是指肌肉受力与其肌肉力量强度的比率,反映了人体肌肉在受到外界环境作用力的作用下肌肉利用强度。
肌肉激活程度为0,说明人体肌肉没有被利用。肌肉激活程度为1,说明人体肌肉被全部利用。当其值超过1,表示人体肌肉活动已超出极限值,处于过劳状态,肌肉可能会被拉伤,并导致肌肉组织的破坏[15-17]。
仿真结果如图2和图3所示。肌肉激活程度随着施加的转向力矩和转向盘转角的变化而变化,而主要工作肌群可以通过肌肉的激活程度的幅值和曲线的斜率来判断。

图2 右肩主要肌群激活程度
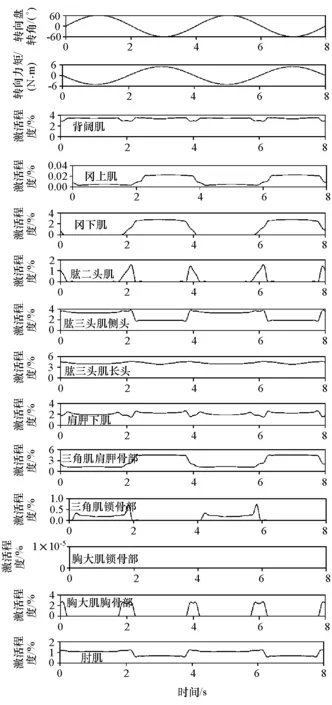
图3 左肩主要肌群激活程度
从图2和图3中可见,在转向操纵过程中,被明显激活的肌肉是三角肌肩胛部、冈下肌、背阔肌、肩胛下肌、肱三头肌侧头和肱三头肌长头。其中,背阔肌和肩胛下肌在整个过程中被激活,胸大肌胸骨部在转向盘处于中间位置附近时被激活,提高了肩关节的稳定性,其余肌肉在某半个周期内即转向盘顺时针转动或逆时针转动时有较高激活程度。
由图2与图3对比可见,转向力矩是根据转向盘转动方向不同而由不同部位肌肉产生。当转向盘逆时针转动时,右肩的三角肌肩胛骨部、肱三头肌侧头和左肩的胸大肌胸骨部、肩胛下肌、肱三头肌长头提供主要的转向力矩。而当转向盘顺时针转动时,则由右肩的胸大肌胸骨部、肩胛下肌、肱三头肌长头和左肩的三角肌肩胛骨部、肱三头肌侧头提供主要的转向力矩输入。
需要特别指出的是,由于仿真模型采用正弦形式的转向盘转角和转向力矩输入且为一个周期,左右侧肌肉激活程度特征相反。
3.3 主要工作肌群力学特性分析
为准确获得驾驶员转向操纵动作对应的主要工作肌群,对转向力矩和前述仿真分析中被明显激活的肌肉进行相关性分析,相关系数接近1表示有极高的相关性。
表2和表3分别为求解的右肩和左肩主要工作肌群激活程度相关系数。

表2 右肩主要工作肌群激活程度相关系数
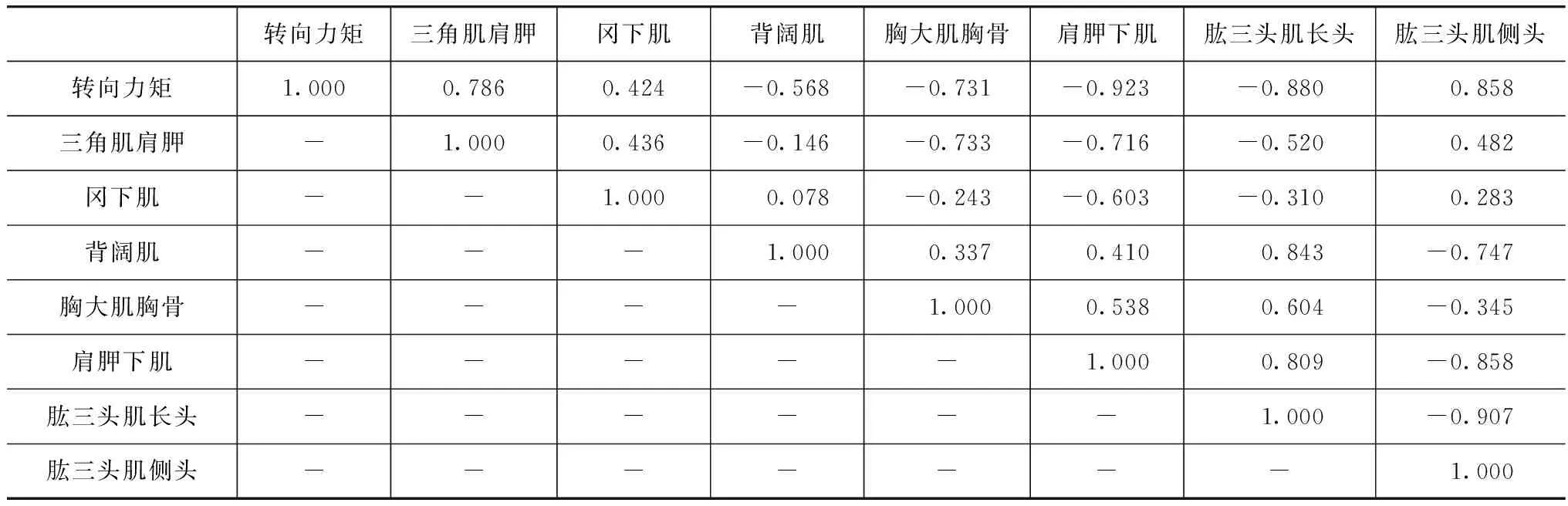
表3 左肩主要工作肌群激活程度相关系数
从表2和表3中可见,三角肌肩胛骨部、胸大肌胸骨部、肩胛下肌、肱三头肌长头、肱三头肌侧头与转向力矩显示出较高的相关性。其中,三角肌肩胛骨部、肱三头肌侧头与转向力矩呈负相关。因此,这5块肌肉为转向操纵动作提供了主要的力矩输入,是驾驶员施加转向操纵时的主要工作肌群。
冈下肌和背阔肌与转向力矩之间没有显示出显著相关性。冈下肌和背阔肌在转向操纵动作中被显著激活,但不是产生驾驶员转向力矩的主要肌群。从人体生物力学与运动控制角度而言,驾驶员转动转向盘时,除施加转向盘切向力形成转向力矩,还会形成沿着转向盘平面的径向力和垂直于转向盘平面的垂向力,这是冈下肌和背阔肌被激活的主要原因。
3.4 肌肉生理特征参数及其应用
通过驾驶员骨肌系统模型获得各肌肉的肌肉活动,并以此进一步分析各肌肉生理特性和规律。肌肉活动是在受到外界环境作用力的作用情况下肌肉强度使用情况,与人体克服外界阻力时的做功大小和能量消耗直接相关。而在人体运动的同时会伴随着肌肉协同收缩现象。所谓肌肉协同收缩是指人体运动时主动肌与拮抗肌共同收缩的现象,协同收缩的作用在于进行精确的运动控制,同时也意味着消耗多余的能量。一般人体在精神紧张、对外界不适应时,协同收缩程度会比较高。肌肉协同收缩程度可以通过主动肌与拮抗肌的肌肉活动计算获得[5]。
因此,根据本文的研究结论,在后续考虑驾驶员生理特性的转向性能设计和主观转向感觉客观化的研究中,可以直接针对确定的上肢主要活动肌群进行研究。通过前述生理特征参数分析,在后续研究中可以使用肌肉活动描述转向舒适性和轻便性等反映驾驶员做功程度的主观评分项,使用肌肉协同收缩程度描述转向准确性和稳定性等反映驾驶员对车辆精准操纵难易程度的主观评分项。当然,驾驶员生理特征参数与各主观评分项之间是否具有映射关系或具有何种映射关系,还需后续试验进一步佐证。
4 结论
结合驾驶员转向操纵动作的生物力学特性,进行了人体骨肌动力学仿真,分析典型转向工况下引发驾驶员转向操纵动作的人体上肢肌肉激活程度,主要结论如下。
(1) 驾驶员转向操纵动作涉及的主要工作肌群是三角肌肩胛部、冈下肌、背阔肌、肩胛下肌、肱三头肌侧头和肱三头肌长头。
(2) 三角肌肩胛骨部、胸大肌胸骨部、肩胛下肌、肱三头肌长头、肱三头肌侧头与转向力矩之间显示出较高的相关性,是产生转向力矩的主要肌群。冈下肌和背阔肌与转向力矩的相关性不高,主要产生驾驶员转动转向盘时的径向力或垂向力。
以上结论为汽车转向性能设计中考虑驾驶员运动控制行为特性,并准确定位测试主要工作肌群提供了设计依据。在后续研究中将重点开展不同车型与不同转向助力性能下驾驶员肌肉力学特性测试,并尝试建立与驾驶员主观感官评价具有高度一致性的基于驾驶员肌肉力学特性指标的转向性能客观评价方法。
[1] MACADAM C C. Understanding and Modeling the Human Driver[J]. Vehicle System Dynamics,2003,40(1-3):101-134.
[2] ABBINK D A, MULDER M, VAN DER HELM F C T, et al. Measuring Neuromuscular Control Dynamics During Car Following with Continuous Haptic Feedback[J]. IEEE Transactions on Systems, Man, and Cybernetics. Part B: Cybernetics,2011,41(5):1239-1249.
[3] PICK A J, COLE D J. Measurement of Driver Steering Torque Using Electromyography[J]. Journal of Dynamic Systems, Measurement, and Control,2006,128(4):960-968.
[4] PICK A J, COLE D J. Neuromuscular Dynamics and the Vehicle Steering Task[J]. The Dynamics of Vehicles on Roads and on Tracks,2003,41:182-191.
[5] PICK A J, COLE D J. Driver Steering and Muscle Activity During a Lane-change Maneuver[J]. Vehicle System Dynamics,2007,45(9):781-805.
[6] LIU Y H, JI X W, RYOUHEI H, et al. Function of Shoulder Muscles of Driver in Vehicle Steering Maneuver[J]. Science China Technological Sciences,2012,55(12):3445-3454.
[7] LIU Y, JI X, HAYAMA R, et al. Method for Measuring a Driver’s Steering Efficiency Using Electromyography[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2014,228(10):1170-1184.
[8] KURAMORI A, KOUGUCHI N, KAMIJO M, et al. Evaluation of Vehicle Drivability by Using Muscle Activity of Drivers[C]. 6th JSEK Conference,2003.
[9] FARAH G, PETIT-BOULANGER C, HEWSON D J, et al. Surface Electromyography as a Tool to Assess the Responses of Car Passengers to Lateral Accelerations. Part II: Objective Comparison of Vehicles[J]. Journal of Electromyography and Kinesiology,2006,16(6):677-684.
[10] GRUJICIC M, PANDURANGAN B, XIE X, et al. Musculoskeletal Computational Analysis of the Influence of Car-seat Design/adjustments on Long-distance Driving Fatigue[J]. International Journal of Industrial Ergonomics,2010,40(3):345-355.
[11] NORDIN M, FRANKEL V H. 肌肉骨骼系统基础生物力学[M].邝适存,等译.北京:人民卫生出版社,2008.
[12] Gray J. Gray’s Anatomy[M]. Random House LLC,2010.
[13] DAMSGAARD M, RASMUSSEN J, CHRISTENSEN S T, et al. Analysis of Musculoskeletal Systems in the AnyBody Modeling System[J]. Simulation Modelling Practice and Theory,2006,14(8):1100-1111.
[14] GB 10000—1988中国成年人人体尺寸[S].1988.
[15] 徐力,郭巧,陈海英.虚拟人体运动系统建模方法研究[J].系统仿真学报,2004,16(8):1789-1793.
[16] 刘书朋,司文,严壮志,等.基于AnyBody技术的人体运动建模方法[J].生物医学工程进展,2010,31(3):131-134.
[17] 丁晨,王君泽,高瞻.基于AnyBody的汽车驾驶中人体腿部逆向动力学仿真[J].中国生物医学工程学报,2013(1):124-128.
Mechanical Characteristics Simulation of Driver’s UpperLimb Muscles in Steering Maneuver
Gao Zhenhai1, Fan Da1, Wang Deping2, Cheng Yue3& Wang Yanhui3
1.JilinUniversity,StateKeyLaboratoryofAutomotiveSimulationandControl,Changchun130022;2.ChinaFAWNewEnergyVehicleBranch,Changchun130122; 3.ChinaFAWGroupCorporationR&DCenter,Changchun130011
From a point of view of human biomechanics and motion control, the law of movement of skeletal muscles of driver’s upper limb in vehicle steering maneuver is analyzed, an inverse dynamics simulation on driver’s steering operation is conducted with human biomechanics software, the activation extents of driver’s upper limb muscles in typical steering condition are obtained, and the main working muscle group of upper limb, which generate steering moment, including the scapular portion of deltoid etc. are determined by using correlation analysis. The conclusion of the study provides a basis for considering the mechanical characteristics of driver’s skeletal muscles and accurately determining the main working muscle group in vehicle steering performance design.
driver; steering maneuver; upper limb muscles; inverse dynamics; mechanical characteristics of skeletal muscles
*高等学校博士学科点专项科研基金(20120061110028)和吉林省科技引导计划(20130413058GH)资助。
原稿收到日期为2014年6月20日,修改稿收到日期为2014年8月6日。