连续交叉路口通行辅助系统*
2016-04-11王建强李克强
徐 彪,张 放,王建强,李克强
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
2016212
连续交叉路口通行辅助系统*
徐 彪,张 放,王建强,李克强
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
构建了一种基于专用短程通信的连续交叉路口通行辅助系统。基于遗传算法和分支定界算法,提出了连续交叉路口的通行车速计算方法,搭建了连续交叉路口通行辅助系统的硬件平台,最后进行了3个路口的实车试验。结果表明,通行辅助系统可在不影响通行效率的前提下,减少车辆通过3个交叉路口的停车次数和车辆燃油消耗。
通行辅助系统;交叉路口;遗传算法;专用短程通信
前言
美国每年汽车怠速过程中所消耗的汽油总量超过106×108L[1],而汽车怠速的主要原因之一为交叉路口前遭遇红灯停车。文献[2]中对交叉路口的驾驶员在各种情况下的驾驶习惯进行了仿真试验,发现在不能获知交通灯信息的情况下,燃油消耗较高。随着车载通信技术的发展,车辆获取道路和交通信息成为可能,这将为驾驶员提供更好的辅助,以降低燃油消耗,提高车辆运行效率[3]。绿灯车速辅助系统能通过车联网技术提前获知交通信号灯相位信息,并实时优化通行速度,可有效地减少燃油消耗。
国内外的学者对绿灯车速辅助系统的硬件和算法进行了研究。目前基于车联网的车路通信平台研究较多,这些车路通信平台可实现交通信号获取和车路通信等功能,如欧洲的SimTD[4]和ElisaTM[5]等。但目前通行算法研究较少。现今的通行算法主要考虑单个交叉路口,以提高通行效率或降低油耗为目标,对通行车速进行优化,可有效地实现经济驾驶[6-10]。但这些研究仅着眼于单个路口,未对连续通过的多个交叉路口的通行车速进行全局优化,而局部优化不能得到全局的优化结果,因此这些研究不能实现整体上的最优。
本文中设计了一种连续交叉路口绿灯通行辅助系统,在城市交叉路口给出行驶速度提示,以提升燃油经济性,保障通行效率。首先搭建交叉路口信号采集和车路通信的硬件平台,建立了车辆在连续交叉路口通行模型和以减小总油耗为目标的优化模型,并用遗传算法和分支定界算法求解连续路口的最优通行车速,最终通过实车试验验证了通行辅助系统的有效性。
1 系统硬件平台搭建
1.1 系统硬件整体框架
连续交叉路口绿灯通行辅助系统的硬件系统由路侧设备、车载设备与上位机和播报设备组成。路侧设备包含用于测量路口位置和提供差分数据的GPS、用于采集交通信号灯相位和正时信息的交通信号采集装置以及用于收集与传输GPS和信号灯信号的DSRC设备。车载设备包含用于测量车辆实时位置和行驶方向信息的GPS、用于提供车辆速度和油耗等信息的CAN总线以及接收自车信息和信号灯信息的车载DSRC设备。上位机安装在车辆上,基于车载DSRC设备提供的信息计算出车辆在路口保证安全、通行效率和燃油经济性的通行速度。系统硬件整体框架如图1所示。
1.2 路侧硬件系统框架
路侧硬件系统包含3个交叉路口的硬件设备。
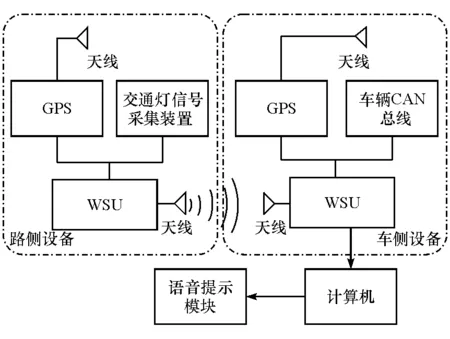
图1 连续交叉路口通行车速辅助系统框架图
每个路口的硬件设备包含交通信号控制器、交通信号采集器、DSRC设备和GPS。每个路口的位置信息、交通灯信号等信息由DSRC设备采集。DSRC设备采集信息后,通过网线连接,传输和共享数据,保证车辆收到任意1个路口DSRC设备信号时,可以获得3个交叉路口的所有信息。路侧硬件的框架如图2所示。
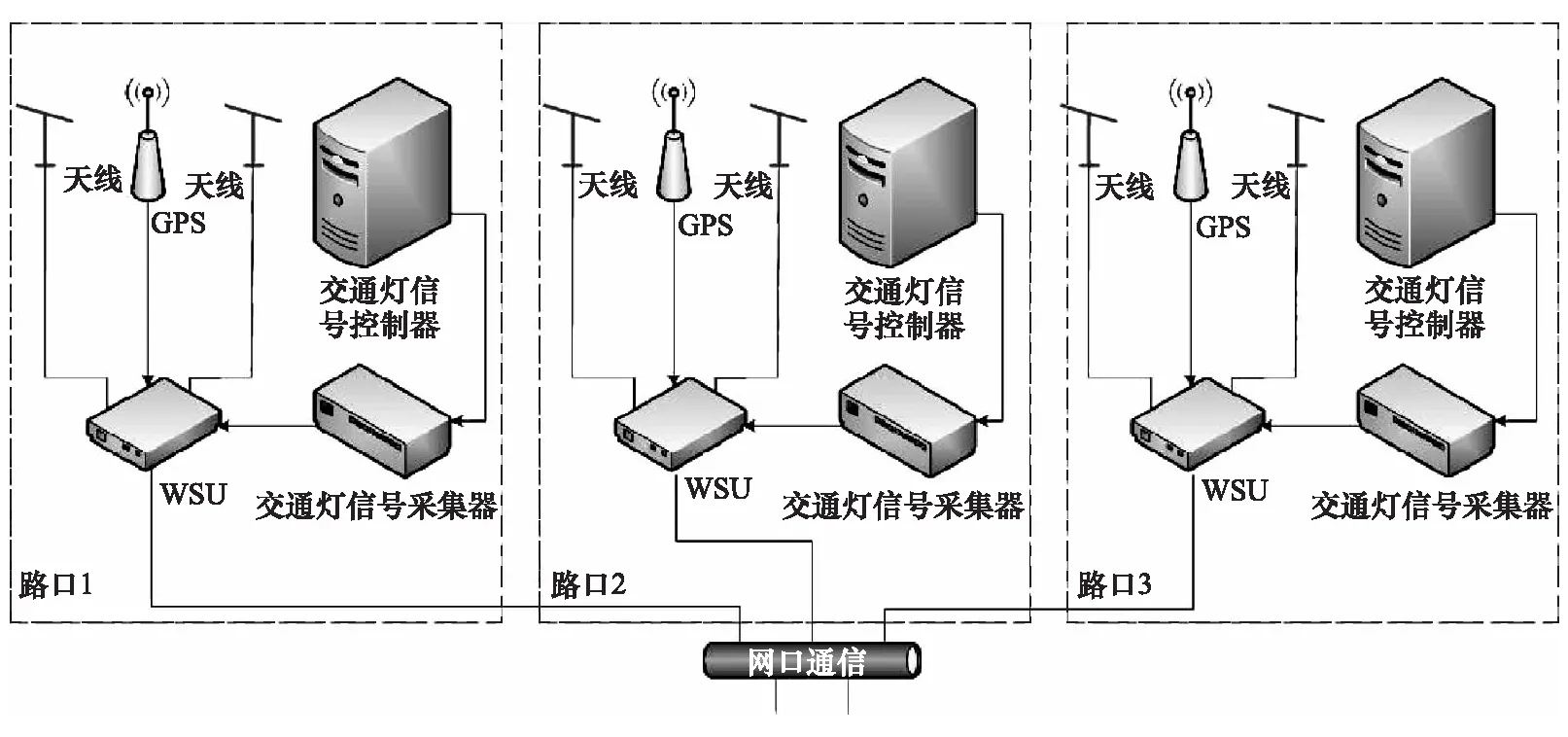
图2 路侧硬件框架
1.3 车载硬件系统框架
车载硬件主要功能为车辆定位、接收路侧信号信息和建议车速的计算与提示,其框架如图3所示。

图3 车载硬件系统框架
2 交叉路口车辆通行模型与算法
2.1 通行算法目标
通行算法需要计算车辆通过连续交叉路口的通行速度,它在不考虑其余车辆的条件下,保证通行效率和通行燃油经济性。
提高通行效率要求车辆尽可能快地通过交叉路口,尽量减少车辆在交叉路口等待绿灯放行的工况。通行燃油经济性主要是降低车辆通过连续交叉路口的燃油消耗,可通过减少车辆怠速停车与起步工况和频繁加速与减速工况来实现。
通行算法的首要目标是保证通行效率,在保证通行效率的前提下对燃油消耗率进行优化。
2.2 基于遗传算法的建议车速计算方法
2.2.1 车辆通行模型
根据车辆在交叉路口的运动情况建立简化的车辆运动学模型。假设:
(1) 交通畅通,其余车辆不对自车的正常行驶产生影响;
(2) 车辆的加减速过程为匀加速直线运动;
(3) 车辆从初速度以恒定的加速度(或减速度)加速(减速)到目标车速后,以目标车速匀速行驶;
(4) 车辆在通过停止线前匀加速到目标车速,然后以目标车速匀速通过停止线。
因此,车辆通过连续3个交叉路口的运动过程可以简化为加速段1-匀速段1-加速段2-匀速段2-加速段3-匀速段3,共6个阶段,如图4所示。

图4 车辆通行运动学模型
在车辆运动过程中,必须满足必要的约束条件,包括运动学约束、通行时刻约束、速度约束和加速度约束等。
运动学约束:
(1)
(2)
(v1-v2)t2+(v2-v3)t4
(3)
式中:d1,d2和d3分别为车辆与第1个、第2个和第3个路口的距离;v0为车辆的初速度;v1,v2和v3分别为车辆在第1个、第2个和第3个路口的通行速度;a1,a2和a3分别为加速段1、加速段2和加速段3的加速度;t2为匀速段1结束的时刻;t4为匀速段2结束的时刻;T1,T2和T3分别为车辆通过第1个、第2个和第3个路口停止线的时刻。
通行时刻约束:
T1∈(g11,r11)∪(g12,r12)
(4)
T2∈(g21,r21)∪(g22,r22)
(5)
T3∈(g31,r31)∪(g32,r32)
(6)
式中:gij为第i(i=1,2,3)个交通灯第j(j=1,2)个绿灯相位开始的时刻;rij为第i(i=1,2)个交通灯第j(j=1,2,3)个红灯相位开始的时刻。
速度约束:
v1,v2,v3∈[vmin,vmax]
(7)
式中:vmin设为0;vmax为道路最高限速。
加速度约束:
a1,a2,a3∈{adec,aacc}
(8)
式中:adec为车辆减速时恒定的减速度,adec=-1.5m/s2;aacc为车辆加速时恒定的加速度,aacc=1.5m/s2。
在上述约束条件下,用通过3个路口的总油耗作为代价函数来对3个路口的通行速度和匀速段时间长度进行优化。
优化目标函数f(v0,v1,v2,v3,t2,t4)为通过3个路口的总油耗,它与车辆的速度和运动时间有关。
故交叉路口通行的优化模型如下。

(9)
约束函数为
(10)
(g21,r21)∪(g22,r22)
(11)
(12)
T3≥t5
(13)
T2≥t3
(14)
t4≥T2
(15)
t2≥T1
(16)
T1≥t1
(17)
速度和加速度约束同式(7)和式(8)。
2.2.2 基于遗传算法的通行车速计算方法
上述优化问题是一个非线性约束下的非线性问题,难以求出解析解,本文中通过遗传算法来求解。
首先构造罚函数,将含约束问题化为无约束问题:
(18)
式中:Fit为适应度函数值;ki为式(10)~式(17)约束中第i个不等式约束的罚函数,当第i个不等式约束满足时,ki取1,否则ki取0。
根据v1,v2,v3,t2,t4的范围随机生成大小为10的初始种群,再根据式(18)的适应度函数计算初始种群的适应度。
选用pm=0.4的染色体交叉率,对选取的父本进行线性重组(λ取0.3):
x1′=λx1+(1-λ)x2
(19)
x2′=λx2+(1-λ)x1
(20)
选取pc=0.1的染色体变异率对父本进行非均匀变异:
(21)
式中:xU为待变异量x的一个上界;r为[0,1]上的随机数;T为最大代数;t为变异代数。
计算所有子代的适应度。然后从后代和父本中选择10个适应度最高的个体组成新的种群。再将新的种群继续交叉、变异和选择,直到满足终止条件或达到繁殖代数为止。最后从种群中得到最优个体,再判断最优个体是否满足式(10)~式(17)的约束。
遗传算法的流程如图5所示。

图5 遗传算法的流程
用遗传算法得到最优解计算过程需要大量迭代,运算量较大,不能满足运算的实时性要求,而且运用遗传算法得到的最优解容易收敛到局部最优解,因此遗传算法在实际应用中效果不佳,于是提出了一种基于分支定界的通行车速计算方法。
2.3 基于分支定界的建议车速计算方法
2.3.1 车辆通行模型
对2.2.1中的车辆通行模型进行简化,假设当车辆通过交叉路口后立即开始加速或减速,如图6所示。
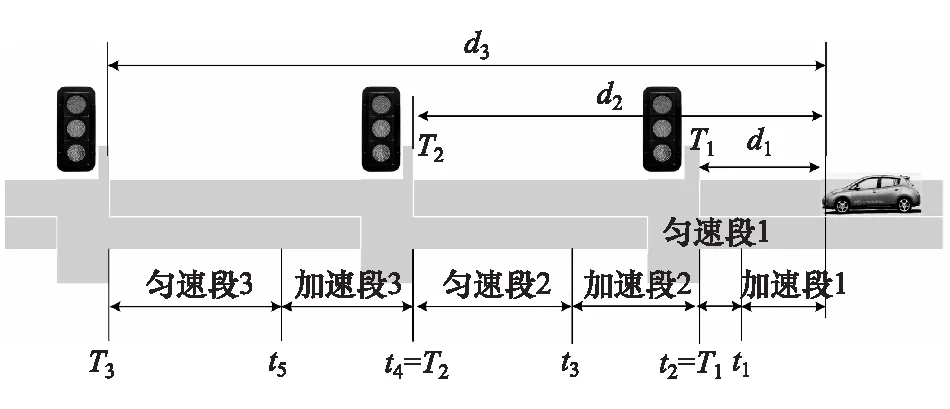
图6 简化的车辆通行模型
因此,有
t2=T1
(22)
t4=T2
(23)
于是,交叉路口通行模型简化为下列优化模型:

约束函数为
(24)
(25)
(26)
T1∈(g11,r11)∪(g12,r12)
(27)
T2∈(g21,r21)∪(g22,r22)
(28)
T3∈(g31,r31)∪(g32,r32)
(29)
v1,v2,v3∈[vmin,vmax]
(30)
a1,a2,a3∈{adec,aacc}
(31)
2.3.2 基于分支定界的通行车速计算方法
根据式(30)中v1,v2和v3的范围对v1,v2和v3进行离散化,然后将每个v1的离散的值代入式(24),求出T1,再检验T1是否满足式(27)。若不满足则继续检验v1的下一个离散值。若满足条件,则继续将每个v2的离散的值代入式(25),求出T2,再检验T2是否满足式(28)的条件。若不满足则继续检验v2的下一个离散值。若满足条件,则继续将v3的每个离散的值代入式(26),求出T3,再检验T3是否满足式(29)的约束条件。若不满足则继续检验v3的下一个离散值。最后得到所有满足约束条件的[v1,v2,v3],求出使代价函数最小的解即得到近似的最优解。分支定界法的逻辑如图7所示。

图7 分支定界法逻辑
在综合考虑3个路口时,在运动学约束、通行时刻约束、速度约束和加速度约束等一系列的强约束条件下,有可能得不到可行解[v1,v2,v3],这意味着不停车地连续通过3个交叉路口是不大可能实现的。此时,不再对3个路口的情况进行综合优化,而是考虑下2个路口的情形。若综合考虑下2个路口,仍然没有可行解[v1,v2],则只考虑1个路口,求解可行解[v1]。若考虑1个路口时,仍得不到可行解,则说明车辆在第1个路口前就不得不停车等待红灯,此时提示驾驶员需要在前方路口停车。
3 实车试验
针对通行辅助系统设计了实车试验,以验证系统的功能和效果。
3.1 平台车辆简介
平台车在原车的基础上,将车端DSRC设备、车端GPS和工控机安装固定在后备箱,如图8(a)所示。将GPS天线和DSRC设备天线安装固定在云台上,如图8(b)所示。
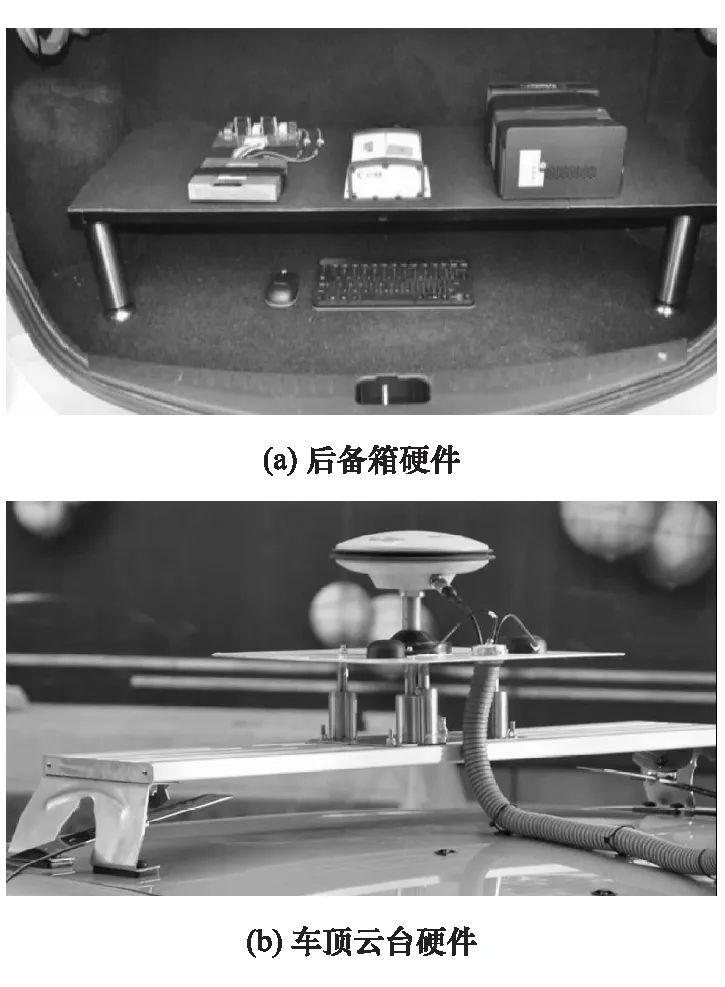
图8 平台车硬件实物图
利用平台车,可实现车辆与信号灯的通信、车辆定位和建议车速显示等功能。
3.2 试验内容
试验时,驾驶员驾驶车辆连续通过具有交通信号的3个交叉路口,采集驾驶员自由驾驶和使用通行辅助系统辅助驾驶两种工况下通过3个交叉路口的油耗、速度轨迹和位移曲线。
本次试验采集了5位驾驶员的驾驶数据,每位驾驶员通过3个交叉路口各20次。通过此数据分析驾驶辅助系统对不同驾驶员的辅助效果。
3.3 试验结果与分析
3.3.1 试验结果
试验车辆安装有油量传感器,可从CAN总线直接获取喷油量数据。分别在自由驾驶和速度提示工况下测量5位驾驶员从3个路口的行驶路线起点到终点的燃油消耗。每位驾驶员的平均燃油消耗量和速度提示工况相对于自由驾驶工况的节油比例如表1所示。定义交叉口停车为距离交叉口停止线<10m,且车速<5km/h的工况。通过GPS坐标和速度信息统计驾驶员的停车次数,每位驾驶员的停车总次数如表2所示。定义交叉口通行时间为车辆通过3个路口起点到终点的时间。试验中,实际采集从第1个交叉路口停止线前50m到最后1个交叉路口停止线以后50m的时间。通过GPS时间统计驾驶员的平均通行时间,如表3所示。
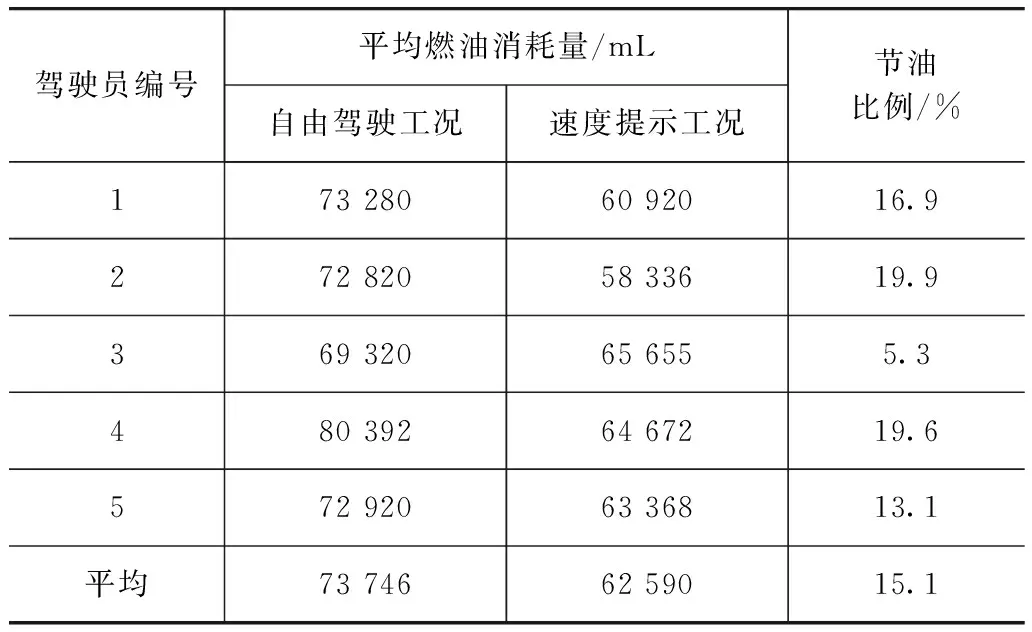
表1 平均燃油消耗量和节油比例
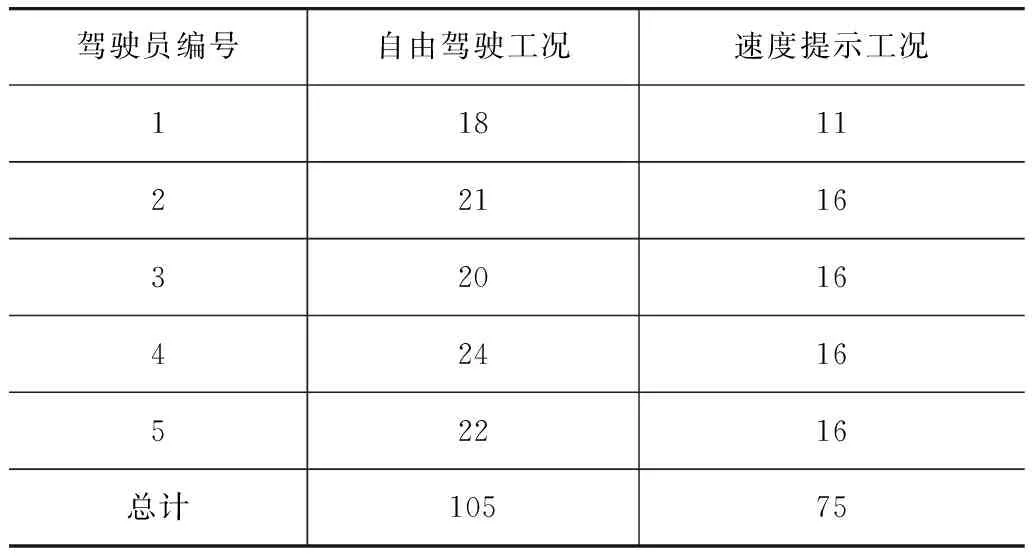
表2 停车总次数
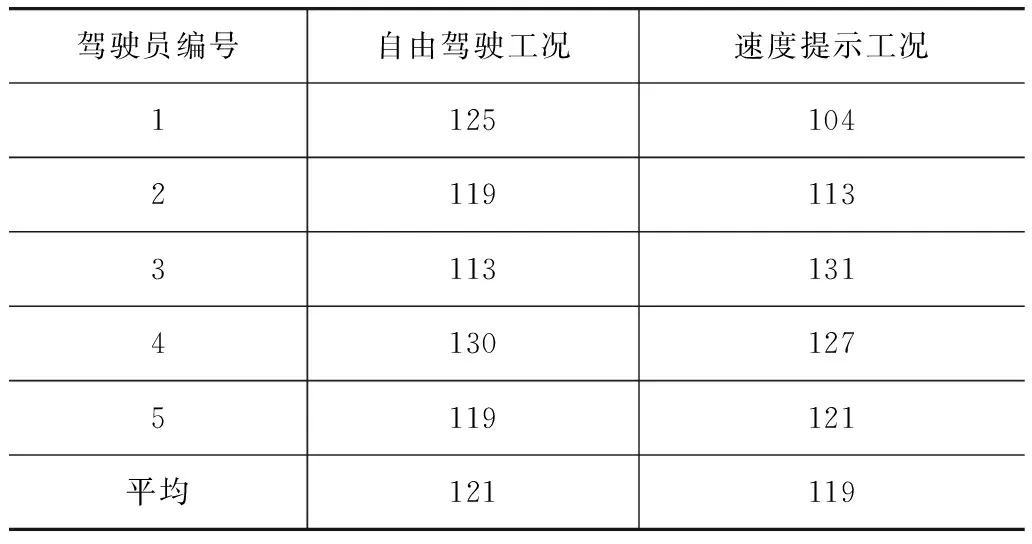
表3 平均通行时间 s
统计结果表明,使用连续交叉路口通行辅助系统较自由驾驶平均节省燃油消耗15.1%,减少停车次数28.6%,而平均通行时间基本保持不变。而且通行辅助系统对不同驾驶员均起到不同程度的辅助作用。
3.3.2 试验结果分析
连续交叉路口通行辅助系统节约燃油、减少停车次数的原因主要是提前获知了交通信号信息,并优化了通行速度。以实车试验中自由驾驶出现的3种典型工况对节油原因进行分析。
(1) 工况1:速度过高,赶上红灯
当驾驶员以较低速度行驶时可以不停车通过路口,但由于缺乏信号灯信息,盲目以较高速度行驶,造成停车怠速,增加了油耗,如图9所示。

图9 工况1位移-时间曲线
(2) 工况2:速度过低,错过绿灯
当驾驶员观察到路口绿灯持续时间较长时,认为没有足够时间通过第3个路口,以较低速度行驶,延误了通过路口的时机,造成停车等待下一绿灯相位,增加了燃油消耗,如图10所示。
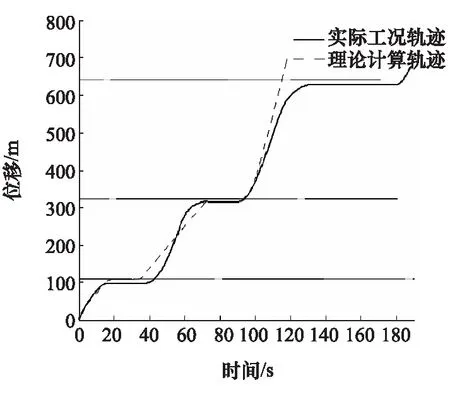
图10 工况2位移-时间曲线
(3) 工况3:速度波动大
驾驶员在行驶过程中由于缺乏信号灯信息,盲目加速和减速,而且速度波动较大,在加速度较大的加速过程中消耗了较多燃料,在制动过程中损失了动能,如图11所示。
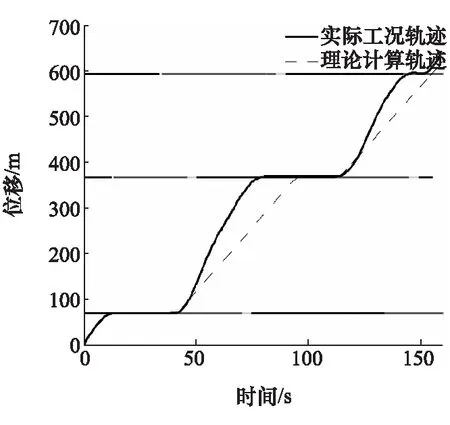
图11 工况3位移-时间曲线
4 结论
基于车辆运动学模型,采用遗传算法和分支定界算法对连续交叉路口的通行车速进行优化,搭建了连续交叉路口的通行辅助系统平台,用实车对比试验验证了系统性能,结论如下。
(1) 在交通状况良好的条件下,基于分支定界的通行车速算法在不牺牲通行效率的前提下,可有效地提高车辆燃油经济性,减少停车次数。
(2) 基于分支定界的通行车速算法对不同驾驶员均有不同程度的辅助作用。
(3) 分析了速度过高、速度过低和速度波动等3种典型工况造成交叉路口油耗提高的原因。
[1] SCHRANK D, LOMAX T, TURNER S. Urban mobility report 2010[R]. Mar,2010.
[2] RAUBITSCHEK C, SCHUTZE N, KOZLOV E, et al. Predictive driving strategies under urban conditions for reducing fuel consumption based on vehicle environment information[C]. Integrated and Sustainable Transportation System (FISTS),2011 IEEE Forum on. IEEE,2011:13-19.
[3] 李克强.汽车技术的发展动向及我国的对策[J].汽车工程,2009,31(11):1005-1016.
[4] WEIß C. V2X communication in Europe-From research projects towards standardization and field testing of vehicle communication technology [J]. Computer Networks,2011,55(14):3103-3119.
[5] SCHWEIGER B, RAUBITSCHEK C, BKER B, et al. ElisaTM-Car to infrastructure communication in the field[J]. Computer Networks,2011,55(14):3169-3178.
[6] ALSABAAN M, NAIK K, KHALIFA T. Optimization of fuel cost and emissions using V2V communications [J]. IEEE Transactions on Intelligent Transportation System,2013,14(3):1449-1461.
[7] RAKHA H, KAMALANATHSHARMA R K. Eco-driving at signalized intersections using V2I communication[C].2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC),2011:341-346.
[8] WANG J, ZHANG D, LIU J, et al. Multi-objective driving assistance system for intersection support[C].2010 13th International IEEE Conference on Intelligent Transportation Systems (ITSC),2010:348-353.
[9] 王建强,王海鹏,刘佳熙,等.基于车路一体化的交叉口车辆驾驶辅助系统[J].中国公路学报,2013,26(4):169-175.
[10] ASADI B, VAHIDI A. Predictive cruise control: Utilizing upcoming traffic signal information for improving fuel economy and reducing trip time [J]. IEEE Transactions on Control Systems Technology,2011,19(3):707-714.
An Assistance System for Crossing Successive Intersections
Xu Biao, Zhang Fang, Wang Jianqiang & Li Keqiang
TsinghuaUniversity,StateKeyLaboratoryofAutomotiveSafetyandEnergy,Beijing100084
An assistance system for crossing successive intersections is constructed based on dedicated short range communications (DSRC). Firstly, a method of calculating vehicle speed for crossing successive intersections is propose based on genetic algorithm and branch and bound algorithm. Then the hardware platform of the assistance system is built. Finally, a real vehicle validation test is conducted with three intersections. The results show that the crossing assistance system can reduce the times of stop and the fuel consumption in crossing three intersections without affecting crossing efficiency.
crossing assistance system; intersections; genetic algorithm; DSRC
*国家863计划项目(2014AA110302)资助。
原稿收到日期为2015年3月30日,修改稿收到日期为2015年12月23日。
