一种基于多点观测的无人机目标定位方法
2016-04-07王春龙马传焱时荔蕙郝博雅
王春龙,马传焱 ,时荔蕙 ,郝博雅 ,周 洲
(1.西北工业大学无人机特种技术重点实验室,陕西 西安 710065;
2.中国人民解放军63961部队,北京 100012)
一种基于多点观测的无人机目标定位方法
王春龙1,2,马传焱2,时荔蕙2,郝博雅2,周洲1
(1.西北工业大学无人机特种技术重点实验室,陕西 西安 710065;
2.中国人民解放军63961部队,北京 100012)
摘要随着无人机技术发展,无人机应用越来越广泛,目前已被应用于侦察监视、抢险救灾和目标打击等领域。对地目标精确定位是军用无人机重要功能之一,提出了一种基于多点观测的无人机对地目标定位方法。该方法定位精度高、适用范围广,不需要搭载光电侦察平台,无需进行激光测距,有效地保证了无人机自身安全,也降低了测量设备的成本,丰富了无人机目标定位理论方法。
关键词无人机;目标定位;多点观测;最小二乘估计
A UAV Target Location Method Based on Multi-point Observation
WANG Chun-long1,2,MA Chuan-yan2,SHI Li-hui2,HAO Bo-ya2,ZHOU Zhou1
(1.ScienceandTechnologyonUAVLaboratory,NorthwesternPolytechnicUniversity,Xi’anShaanxi710065,China;2.Unit63961,PLA,Beijing100012,China)
AbstractWith development of UAV technology, UAV has been widely used for reconnaissance, rescue, targets strike and other purposes.The ground target precise locate function is very important for some military UAV systems.This paper proposes a new method for UAV target location based on multi-point observation.The method has high accuracy and extensive application without using photoelectric reconnaissance platform and laser ranging.This method can reduce the cost of measuring equipment and ensure the safety of UAV.It enriches the theory of UAV target location technology.
Key wordsUAV;target location;multi-point observation;least square estimation
0引言
无人机具有体积小、造价低、使用方便和对环境要求低等优点,已被广泛应用于侦察监视、抢险救灾和目标打击等领域[1-3]。其中,对地目标精确定位是军用无人机重要功能之一,在陆军精确打击体系中发挥重要作用[4],是无人机研究领域的热点。
文献[5]提出空间两点交会定位方法,利用自身位置及姿态信息构建空间三角形,定位精度提高至60 m;文献[6]建立空间三点交会定位模型,与共线定位算法相结合,通过差分定位原理,达到快速与准确获得任意点坐标的目的;文献[7]提出一种不依赖于数字高程模型(DEM)及像片内外方位元素的测量值的无人机对地定位方法,该方法根据非共线位置拍摄的多帧图像及其至少3个可识别同名像点坐标迭代计算摄像机姿态角和焦距的精确值,然后利用多摄站前方交会法求取地面目标的三维坐标,定位误差减小到l0 m。文献[8]给出一种基于姿态测量/激光测距的目标定位模型,精度满足舰炮对岸射击的需要;文献[9]提出“逆速高比补偿测高法”获得相对高度数据,在不增加硬件设备的情况下实现无激光测距仪的小型无人机光电侦察平台目标快速定位实时解算;文献[10]提出基于测向交叉定位方法的多无人机协同定位误差模型和多机数据融合优选函数;文献[11]对照相侦察定位、电视侦察定位和激光测距定位3种无人机目标定位方法进行了比较分析。
以上方法中,无人机有源定位以基于姿态测量/激光测距定位模型为主,精度较高,但需要装备光电侦察平台以完成目标跟踪、激光测距等功能,成本大,且不利于无人机自身的隐蔽。无人机无源定位需要获取载体高程、摄像机焦距和摄像机外方位元素等参数,利用共线条件方程计算地面目标与载体的相对位置,一般需要假定待测目标区域为平坦地面[12],目标定位精度较低。
1无人机两点观测目标定位原理
本目标定位方法所需硬件设备主要由标校过的摄像机和云台组成,采用吊舱式结构安装。在目标定位过程中,侦察视频和遥测信息经数据链传输至地面站显示,操纵手通过操纵杆及其他指令控制摄像系统搜索侦察目标,当感兴趣的目标出现在画面上时,通过对目标同名点的多次拍摄,结合飞机的姿态测量数据、卫星接收机位置信息、摄像机云台方位角和高低角等数据,通过一系列的计算,获取目标的三维坐标,完成定位过程。
无人机两点观测目标定位原理图如图1所示,设无人机在点C1和C2处对地面目标点P摄影,获得一个立体相对,地面目标点P在左右相片上的像点为p1和p2,同名射线C1p1和C2p2相交于地面目标点P。
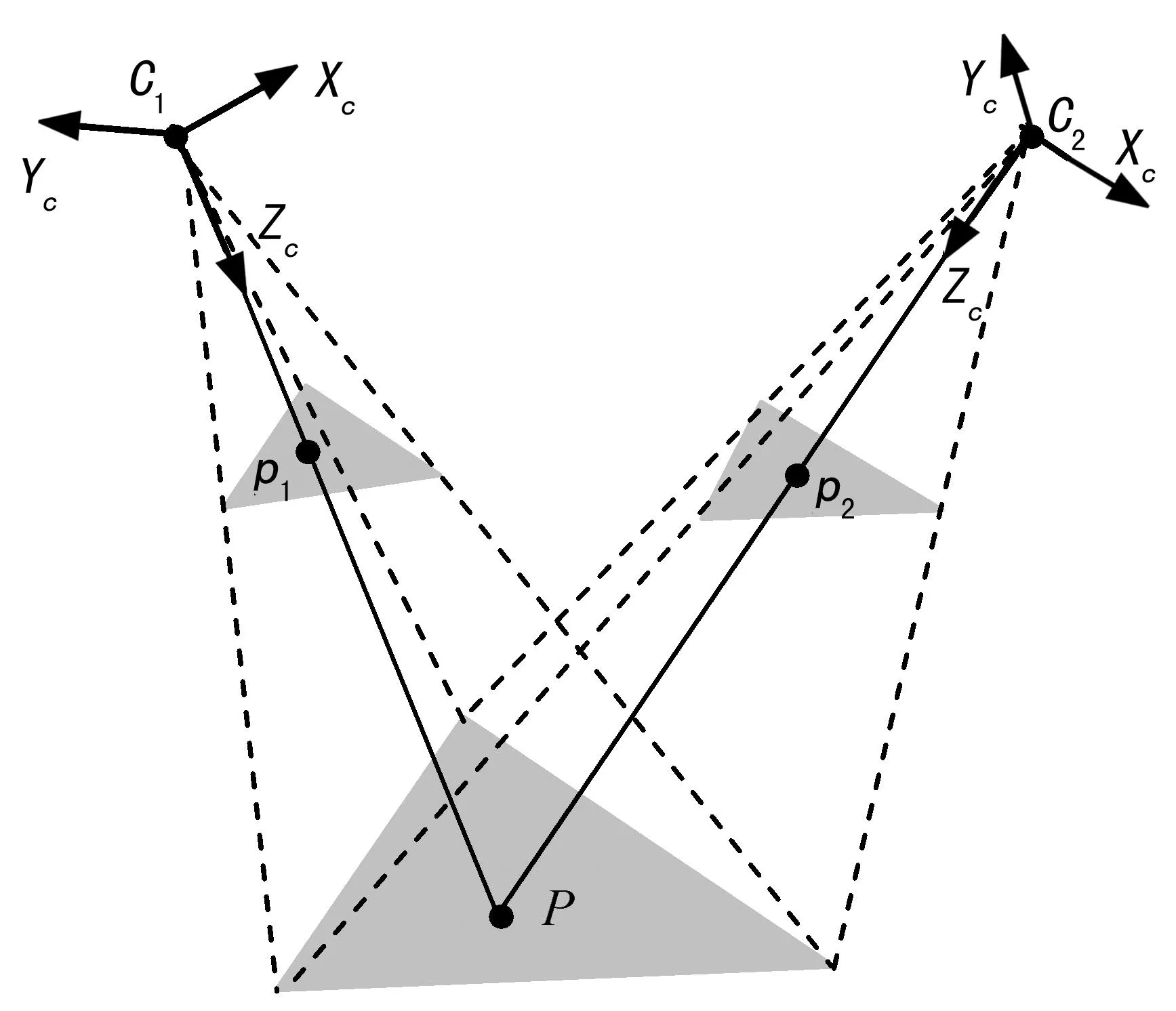
图1 无人机两点观测目标定位原理
根据中心透视投影成像关系,图1所示关系满足共线条件方程如下:
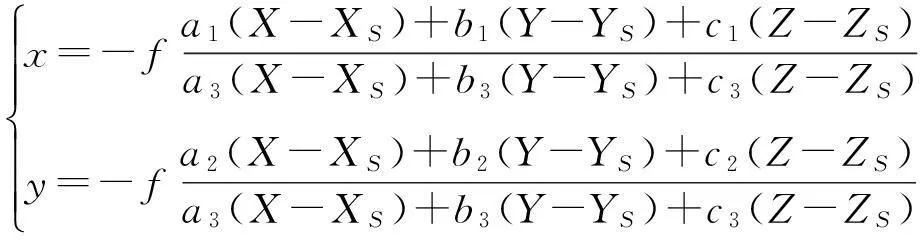
(1)
根据中心透视投影成像关系,可以推导出C1和C2的成像共线方程分别为:
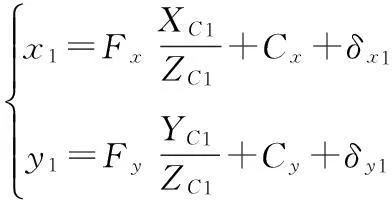
(2)
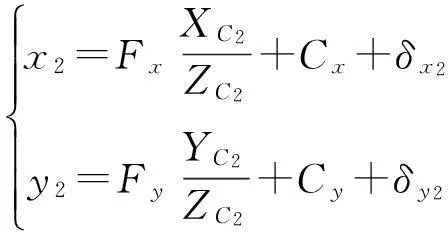
(3)
式中,(xi,yi),i=1,2为P点实际成像点坐标;(Fx,Fy)为等效焦距;(Cx,Cy)为像主点坐标; (XCi,YCi,ZCi),i=1,2为P点在Ci摄站摄像机坐标系下的坐标。
根据摄像机坐标系与世界坐标系的相对位姿关系,可得
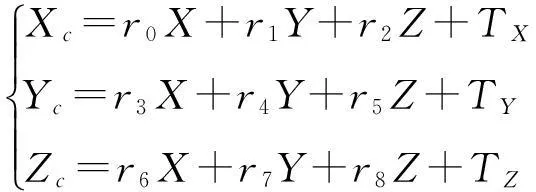
(4)
式中,(X,Y,Z)为目标点在世界坐标系中的坐标;r0~r8为世界坐标系与摄像机坐标系姿态一致而需要的旋转矩阵分量;Tx,Ty,Tz代表将世界坐标系原点移到摄像机坐标系原点的平移量。
在无人机目标定位过程中,以第1个测量点的地理坐标系作为世界坐标系,则第1次测量点Tx=Ty=Tz=0,第2个测量点的Tx,Ty,Tz的值可以通过卫星定位接收机2次定位差值计算出。通过惯性测量单元和摄像云台,获取飞机偏航角φ、俯仰角γ、横滚角θ以及摄像机的方位角α和高低角β,可得
(5)
式中的矩阵转换参数如下所示:
,
。
联立方程式(2)、式(3)、式(4)和式(5),解出目标点P的坐标(X,Y,Z)。
2无人机多点观测目标定位模型
由于摄像测量系统的物距远大于焦距。摄像机参数或者像点提取结果误差引起的成像光线方位的微小偏差,会带来明显放大的空间点定位结果误差,所以两点观测目标定位方法对各种噪声很敏感,并不能真正实现高精度定位。无人机多点观测目标定位模型采用同名目标点多次测量、SAD算法同名点提取、加权最小二乘估计最优求解等方法提高对地目标的定位精度和鲁棒性。
如图2所示,无人机在预定航迹的飞行过程中,对目标点进行n(n>3)次摄像,获取n张图像。
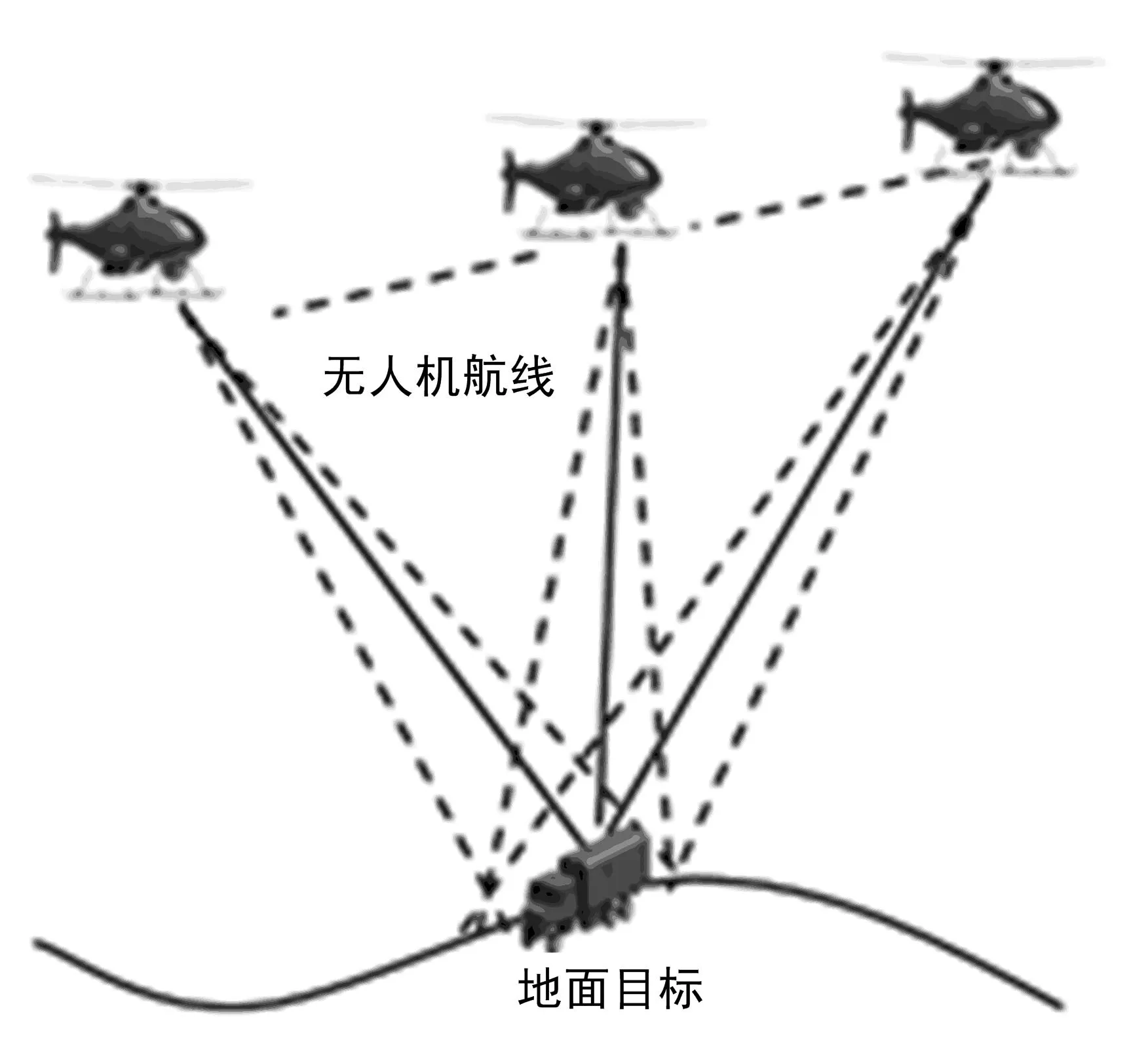
图2 无人机多点观测目标定位
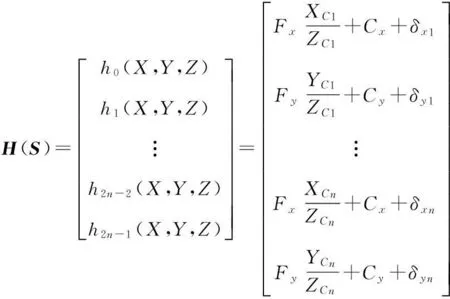
根据共线方程有
Z=H(S)。
(6)

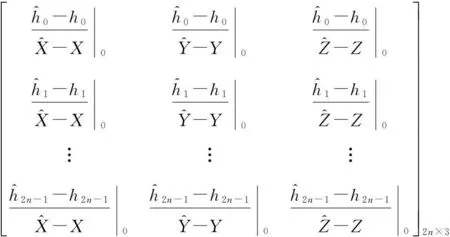
将式(5)在初值处进行一阶泰勒展开,可得
Z=H(S0)+B·(S-S0)+Δn。
(7)
式中,
令
U=Z-H(S0),
(8)
V=S-S0。
(9)
结合式(7)、式(8)和式(9)得:
U=BV+Δn。
(10)
根据最小二乘估计,可得

(11)
无人机进行目标定位过程中,在各个测量点,飞机的姿态、飞行高度、摄像机的方位角和高低角都不同,这种情况下,即使使用的是同一个摄像机,但是由于摄像机外参数不同,导致各测量点目标定位精度不同,对误差的贡献也不一样。因此,引入加权最小二乘估计。
令R-1为加权矩阵,且
(12)
则有

(13)
根据式(9)和式(13)得:

(14)

加权矩阵的估计较为困难,通常选择对角线矩阵或更简单的单位矩阵,有研究表明,尽管选择的权矩阵有误差,但对未知参数的加权最小二乘估计依然是无偏估计。采用了一种方便、科学的方法来获取权矩阵,在实用中取得良好的效果。其核心思想为:对于引起误差较大的测量点,给予较小的权值,误差较小的测量点,给予较大的权值,从而可加大较好的测量点的“贡献”,改善最小二乘估计的精度。在目标定位过程中,测量点距离目标点越远,定位精度越差,而测量点与目标点的距离由测量点的高程和测量点摄像机光轴指向角共同决定,符合基本的三角关系。由此可得:
(15)
式中,σ为权矩阵中的元素;ε为摄像机光轴指向角;H为测量点高程。
3结束语
本文提出的无人机目标定位方法是一种仅依赖于摄像机的实时连续定位方法,也可与单点光电平台测角/激光测距、两点空间交会和三点空间交会等有源目标定位方法结合使用,通过数据融合,提高对地目标定位的准确性和实时性,如应用在无人直升机中,也可通过多点悬停、多次测量提高测量精度,具有广泛的应用前景。
参考文献
[1]肖春晖.无人机在战场侦察上的应用[J].无线电工程,2008,38(5):50-52.
[2]陆博迪,孟迪文,陆鸣,等.无人机在重大自然灾害中的应用与探讨[J].灾害学,2011,26(4):122-126.
[3]向武略,程远国,李仙茂.舰载无人机雷达、通讯侦察载何在海战场打击效果评估中的运用[J].国防科技,2014,35(5):36-40.
[4]张楠,王潇,王军力.无人机在陆军精确打击体系中的应用研究[J].兵工学报,2010,31(l2):107-111.
[5]孙超,都基焱,段连飞.一种空间两点交会无人机定位方法[J].兵工自动化,2011,30(6):35-36.
[6]姚新.无人机提高目标定位精度方法研究[J].舰船电子工程,2011,31(10):56-59.
[7]余家祥,萧德云,姜鲁东.基于多帧图像同名点的无人机对地定位新方法[J].兵工学报,2008,29(3):300-304.
[8]毛昭军,汪德虎.姿态测量/激光测距的无人机目标定位模型[J].火力与指挥控制,2003,28(5):14-17.
[9]雷仲魁,仲筱艳.基于逆速高比补偿测高法的侦察目标定位[J].遥测遥控,2010,31(6):52-55.
[10]陈新,彭科举,周东翔,等.基于优选数据准则的空基多平台协同定位方法[J].信号处理,2010,26(10):1 466-1 472.
[11]朱蕾,张少兵,蒲天龙.炮兵作战中无人侦察机定位校射方法的运用[J].四川兵工学报,2009,30(11):118-119.
[12]林旻序,乔艳峰,戴明,等.单载荷航空吊舱目标定位方法研究[J].红外技术,2011,33(10):593-597.
王春龙男,(1979—),博士。主要研究方向:无人机技术论证与管理研究。
马传焱男,(1972—),博士。主要研究方向:飞行器测控与导航技术研究。
作者简介
中图分类号TP302
文献标识码A
文章编号1003-3106(2016)02-0048-04
收稿日期:2015-11-02
doi:10.3969/j.issn.1003-3106.2016.02.12
引用格式:王春龙,马传焱, 时荔蕙,等.一种基于多点观测的无人机目标定位方法[J].无线电工程,2016,46(2):48-51.
