GNSS-RTK技术在陆地打桩引导系统中的应用
2016-04-07莫文晖韦长算於永东韩伟浩
莫文晖,韦长算,於永东,韩伟浩
(1.广州中海达定位技术有限公司,广州 511400;2.广州中海达卫星导航技术股份有限公司,广州 511400)
GNSS-RTK技术在陆地打桩引导系统中的应用
莫文晖1,韦长算2,於永东2,韩伟浩1
(1.广州中海达定位技术有限公司,广州511400;2.广州中海达卫星导航技术股份有限公司,广州511400)
摘要:针对传统陆地打桩施工作业效率低下的现状,本文提出了一种针对陆地打桩车上利用GNSS导航定位中的RTK作业模式进行平面与高程引导控制的方案,并配合软件引导车辆司机的快速作业;阐述本方法的原理与系统组成,并对系统特性做了实测对比分析与验证;结果表明:新方案能有效提高打桩作业精度、效率,并缩短工期、降低成本。
关键词:GNSS;RTK;陆地打桩;引导控制
0引言
如今全球卫星导航系统(global navigation satellite system,GNSS)包括美国的全球定位系统(global positioning system,GPS)、俄罗斯的格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)、中国的北斗卫星导航系统(BeiDou navigation satellite system,BDS)、欧盟的伽利略卫星定位系统(Galileo satellite navigation system,Galileo)在各行业中的应用越来越广泛,从传统的航天、测绘、地理信息、海洋,到地质监测、地基增强、机械控制、智能交通等,逐步从专业领域走向大众生活。2015-08-09,BDS的第18、19颗卫星实现星间链路建立,加速了我国在卫星导航行业应用化领域的推动。如今,在工程机械领域的陆地打桩机上,也逐步引入了以高精度GNSS定位为核心的引导控制系统,提高打桩机作业的精确度与速度效率,提供一种了“先进的生产力的发展方式”。打桩机用于风力发电、光伏发电、建筑地基、承重墙等的立桩施工,往往面临工作量大,项目时间紧迫,施工质量要求严格等情况。若引入GNSS引导控制系统可大幅提高打桩作业精度、效率与质量,缩短工期、降低成本,且支持全天候作业。
1打桩引导控制系统工作原理
1.1系统原理简介
打桩机引导控制系统使用GNSS实时动态差分法(real-time kinematic,RTK)定位技术、传感器技术和定制软件,实现对打桩作业平面位置、桩顶标高的精准实时测量,并对比设计坐标给出提示作业剩余距离,引导施工。采用RTK定位技术[1-2]需要架设基准站,校准控制点,通过基站差分信号实时通信传递给车载移动站,实时解算出高精度定位结果。车载传感器可实时监控桩锤的抬高与降低距离,并校准积累误差,给软件解算出正确的引导信息。
1.2系统组成
如图1所示,本系统由以下3部分组成:基准站部分、通信数据链、车载终端。
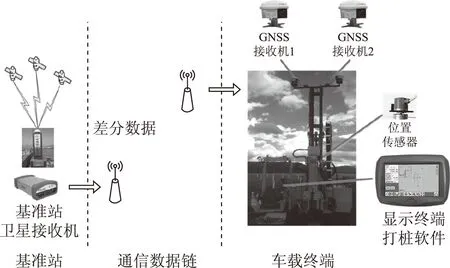
图1 打桩系统总体组成框图
图1中,RTK定位技术的基准站部分主要由GNSS基准站接收机实时观察基准点的卫星信号,并与已知基准坐标点进行比对计算出差分修正数据输出[3-4]。
而通信数据链路可由各种无线通信设备组成(如电台或3G移动网等),需要保证数据传输的实时稳定与可靠性[7-8],它负责实时将基准站接收机输出的差分数据传输至车站终端部分,数据的实时连续与否直接影响到车载定位接收机的解算精度。
车载终端部分主要由两台GNSS移动站接收机、高程位置传感器、平板显示终端、打桩软件等组成,两台卫星接收机实时接收卫星信号和来自基准站的差分数据,以通过RTK算法解算出厘米级精度的点位坐标,并输送至打桩软件处理[5-6];位置传感器安装于桩锤上下摆动位置,实时检测桩锤的上升与下降相对高度,数据同样输入打桩软件进行处理;打桩软件可推算出桩心点坐标和目前打桩高程,并计算出与设计桩点的平面位移差值、高程位移差值,给出参考信息,引导打桩人员精确作业。
1.3桩心坐标的推算
桩心平面坐标C点的(x,y)计算如图2所示示意图,A与B为两个GNSS定位出的已知点A(xA,yA),B(xB,yB),C(xC,yC)为需要计算的桩心坐标点,而车顶横杆上A与B为相对固定的位置,因此AB直线L1为一个常数,用测量仪器测出。再根据点到直线的距离原理,C点与AB直线的距离即垂线L2交L1与点M,则同样可测出LAM、LBM、LCM的长度,理想状态是M在AB的正中心位置,因此假设以M为原点,AMB为X轴,MC为Y轴建立直角坐标系,可由A、B两个已知点推算出桩心C(xC,yC)点的平面坐标,平面软件将这个桩心平面坐标与实际导入的设计坐标进行相减,差值即为需要提示司机的剩余作业距离。
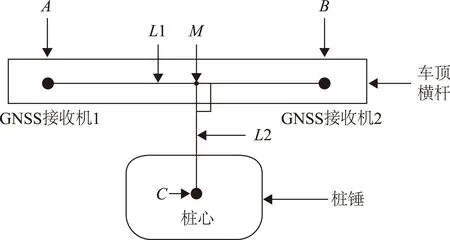
图2 桩心位置的推算示意图
1.4桩高的计算
桩高计算包含以下五个参数:接收机天线1相位中心高程H1,常数A1,位移编码传感器读数B1,继续锤击距离D,设计高程H0。
H1为卫星定位接收机实测出的高程,在某一点位固定不变。B1为位移编码传感器器读数,随着桩锤抬升至桩锤初始位置(即抬桩的最高点),再沿着正下方打桩下降,B1的值不断变化。常数A1为桩锤初始位置距离车顶横杆GNSS接收机的固定高差,此时若要计算某一时刻打的桩的高程值,可用H1减去常数A1,再减位移编码器的实时读数B1,可获得当前桩顶的实时高程,最后与设计高程H0比较,计算应该继续打桩的深度值,给予司机引导。
即某一时刻应该继续锤击的距离
D=H1-A1-B1-H0
(1)
式(1)中,H1为接收机天线1相位中心高程,B1为位移编码传感器读数,A1为固定常数值,H0为设计桩位高程。

图3 桩高推算示意图
2打桩软件的设计与实现
2.1软件设计工作流程
软件设计遵循简单易用原则,首先,需要设置几个参数为
1)工作当地的坐标系统转换参数;
2)定位接收机和外接传感器的连接参数;
3)接收机与桩头的相对位置模型参数。
系统工作时先导入设计好的桩点位置数据,根据已知点位的平面坐标和高程,进行初次平面与高程的校准,完成之后图形界面选择要打的桩,系统自动提示车辆到选中桩位置要移动的方向与距离。按系统指引到达指定位置之后就可以进行打桩工作,打桩过程中系统会提示还需要打桩的深度,打到读数为0止,再进行下一根打桩工作。在打桩过程中可进行抽检对比工作,确保打桩的效果。
系统工作流程如图4所示

图4 打桩软件设计工作流程图
2.2软件工作指引方式与界面
软件采用所见即所得的操作方式,平面位置采用图形化引导,箭头指示车辆需要行进的前后左右方向与距离。根据打桩车桩头只能前后和左右移动的特点,调整距离、指引车辆移动[9]。桩头与桩的设计值之间的距离a会分解到桩头的运动方向b和c,提高操作效率。如图5所示。

图5 平面引导方式
软件界面设计与相关参数指示如图6所示。
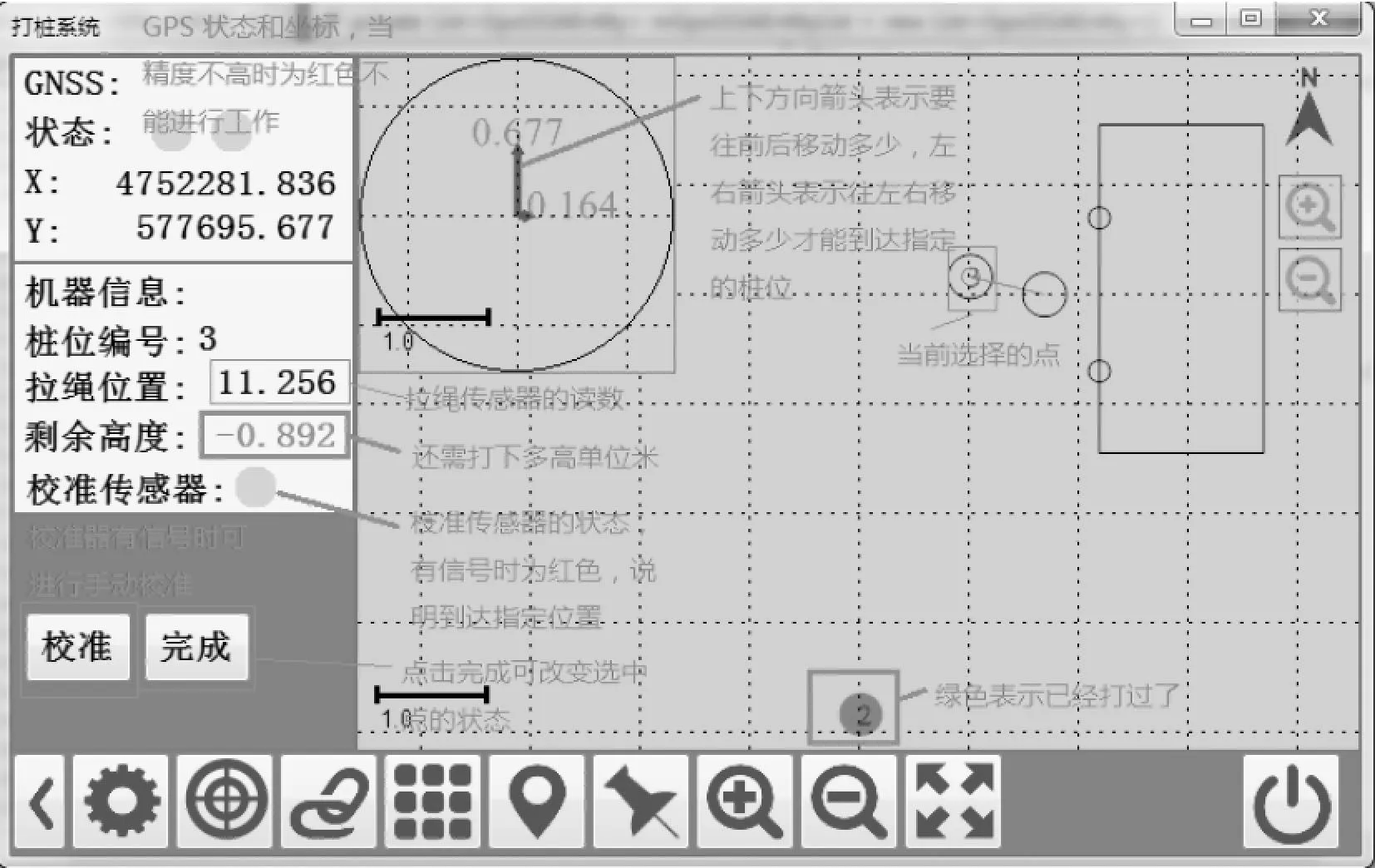
图6 软件界面的设计
3系统数据的搜集对比与分析
3.1在使用本系统前后的作业人员数量统计
一项陆地打桩施工作业,通常需要一个测量人员粗略放样设计点位、一个桩车司机驾驶车辆并操作打桩,一至两个工人协助吊桩,一个校高员负责用测量仪器测高,一个吊铅锤人员负责协助瞄准平面点位。若使用本套系统,可无需高程测量人员与平面瞄点人员的工作,系统自动计算完成指引,即可由原来的5人减少至3人,人工成本节省40%。

表1 作业人员数量统计
3.2在使用本系统前后的打桩速率统计
传统方式为采用人工吊铅锤的方式对点,用水准尺观测,测定高程,效率较低[10],而使用本文提出的系统方案,可减少依赖精确放样做标记与人工对点的时长,采用粗略放样与自动化引导对点,大大节省了单根打桩作业的时间,系统对比测试,得出表2数据。
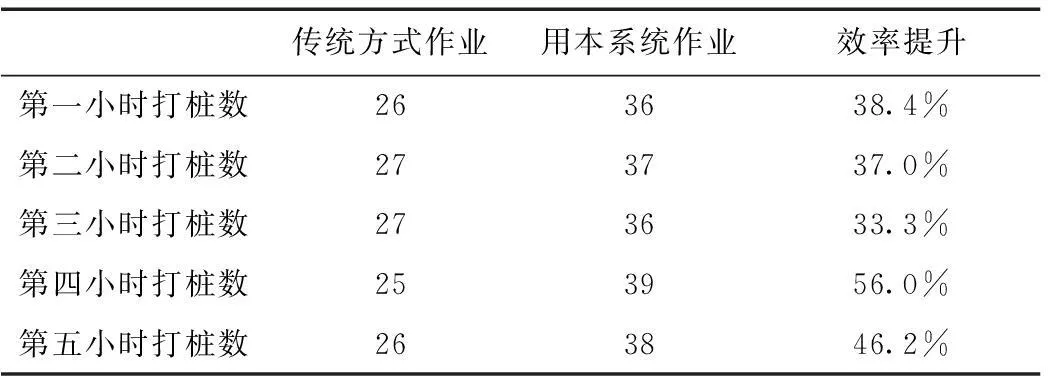
表2 打桩速率数据统计
3.3在使用本系统后的打桩精度数据统计
RTK技术采用载波相位动态实时差分的方法,理论实时测量平面精度在±1 cm,高程精度在±2 cm,完全满足打桩工程施工的精度要求,选取某一次系统引导的实际打桩数据与设计桩的坐标(x、y、h)核对如下:
通过表3的可以看出,使用本系统打桩后的平面精度可控制在2 cm以内,高程精度可控制在4 cm误差范围内。打完桩后的效果如图7所示。
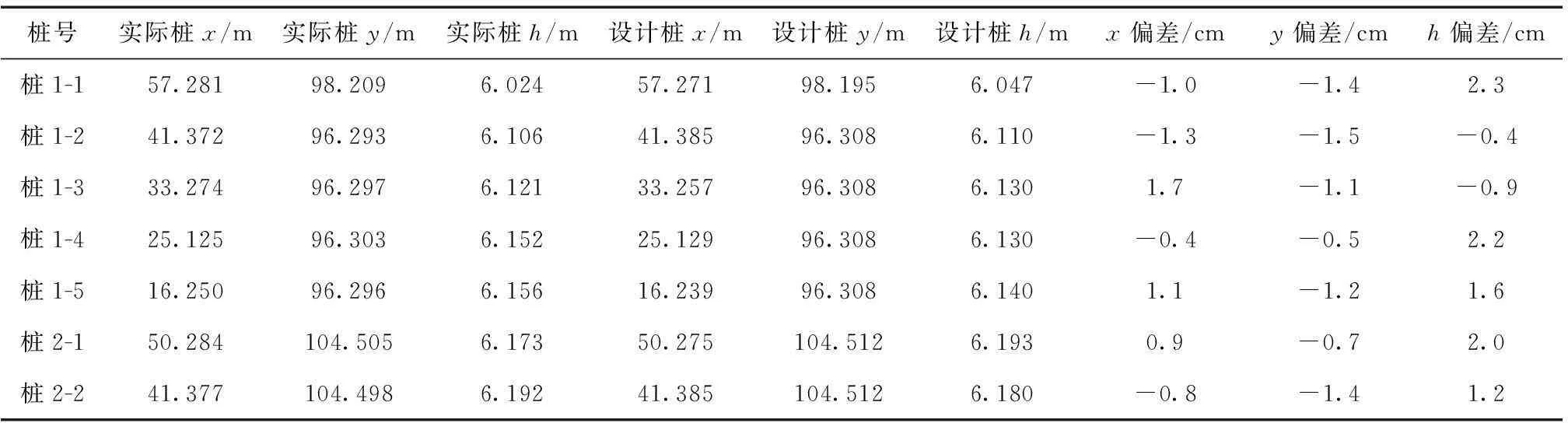
表3 桩位核对数据

图7 打桩后的阵列效果
4结束语
本文介绍了一种利用GNSS卫星导航RTK技术应用于陆地打桩引导控制系统的方案,利用RTK技术得到厘米级高精度的定位结果,配合传感器实时精确测量桩高,利用打桩软件实现了数据处理的自动化,打桩定位过程中的桩中心平面位置的定位、桩顶标高控制等一系列实时定位信息的处理均由程序自行完成,并给予施工司机以引导信息,相比较传统的人工逐点测量方法,本方案可有效提高施工精度、加快效率、降低成本,且不分昼夜全天候均可实施打桩作业,给予陆地打桩工程得力的帮助。
参考文献
[1]李征航,黄劲松.GPS测量原理与数据处理[M].武汉:武汉大学出版社,2005:25-102.
[2]王毅明,钟金宁,黄志洲.GPS RTK测量技术的应用与体会[J].现代测绘,2003,26(2):28-29.
[3]杨帆,林吉兆,谢义林,等.基于GPS-RTK的海上打桩远程监控系统设计[J].测绘工程,2014,23(12):76-80.
[4]寇刚.RTK技术及其在打桩定位中的应用[D].上海:同济大学,2004.
[5]李海成,石国平.基于北斗卫星导航的工程机械车联网系统[J].电子技术与软件工程,2014(19):111.
[6]易祥,简荣.卫星导航技术(GNSS)在工程机械上的应用[J].建筑机械,2013(14):38-40.
[7]邵蔚,郑若奇.海上GPS打桩定位系统[J].中国港湾建设,2003(2):30-36.
[8]黄剑波,荣国城.GPS打桩定位系统的安装及应用[J].公路,2009(1):142-146.
[9]BRINCH H.Remote control system based on client/server and development of software[J].Visual Studio Magazine,2003,28(5):33-37.
[10]HAJELA D.Obtaining centimeter-precision heights by gps observations over small areas[J].GPS World,1999,8(1):55-59.
Application of Land Piling Guidance System base on GNSS-RTK Technology
MOWenhui1,WEIChangsuan2,YUYongdong2,HANWeihao1
(1.Hi-Target Positioning Tech Co.Ltd.,Guangzhou 511400,China;2.Hi-Target Navigation Tech Co.Ltd.,Guangzhou 511400,China)
Abstract:This paper proposes a solution for the current low working efficiency of traditional land piling.This situation uses RTK mode to guide and control the pile driver both in horizontal and vertical directions,and assists the operator doing the job more efficient.This paper discusses the theory and component of this solution,analyses and verifies the system features by actual testing.The result shows that the new solution can improve the working efficiency and precision,the working period is reduced and the cost is saved.
Key words:GNSS;RTK;land piling;guidance and control
中图分类号:P228
文献标识码:A
文章编号:2095-4999(2016)-01-0122-04
作者简介:第一莫文晖(1988—),男,广西桂林人,工程师,主要从事北斗卫星导航产品开发与相关行业系统集成项目研究工作。
收稿日期:2015-11-06
引文格式:莫文晖,韦长算,於永东,等.GNSS-RTK技术在陆地打桩引导系统中的应用[J].导航定位学报,2016,4(1):122-125.(MO Wenhui,WEI Changsuan,YU Yongdong,et al.Application of Land Piling Guidance System base on GNSS-RTK Technology[J].Journal of Navigation and Positioning,2016,4(1):122-125.)DOI:10.16547/j.cnki.10-1096.20160124.
