城市自导向胶轮电车技术特点与应用
2016-04-06李芾,杨阳
李 芾, 杨 阳
(西南交通大学机械工程学院, 四川 成都 610031)
城市自导向胶轮电车技术特点与应用
李 芾, 杨 阳
(西南交通大学机械工程学院, 四川 成都 610031)
为了研究具有自导向功能的胶轮有轨电车在国内外的应用和发展情况,以具有代表性的法国Translohr胶轮导轨电车、重庆跨座式单轨、日本千叶市SAFEGE型悬挂式单轨车辆、法国胶轮地铁MP等为例,分析了车辆技术特点、走行部及相关研究现状.目前对自导向胶轮电车的研究主要集中在导向机理、动力学性能及导向结构创新上.与传统电车相比,自导向胶轮电车使用胶轮可大幅降低噪声,爬坡能力提高约50%,缩小曲线半径且占地空间小,可以节约城市用地和适应不同的城市地形,属于中等运量的交通工具.其研究和应用在我国尚处于起步阶段,进一步研究应集中在轮胎减轻磨耗、可靠高效的导向机构设计及相关设计使用标准制定上.重庆跨座式单轨及上海张江Transport电车运行经验表明,实现车辆系统关键零部件及控制系统的国产化是我国胶轮自导向电车能够得到持续发展的前提条件.
自导向胶轮电车;技术特点;走行部;国产化
1825年英国建成了世界上第一条商业化运行铁路,在随后的近两个世纪里轨道交通得到迅速的发展,从最初时速10 km发展到现在最高运行时速350 km,线路总长目前已超过130 万km.作为轨道交通运输重要组成部分的有轨电车在城市公共交通中也占有越来越重要的地位,但是现在几乎所有的有轨电车均采用钢轮钢轨走形模式,车辆在钢轨上行驶时产生振动和噪声,对周围环境的影响已成为限制城市轨道交通发展的突出问题之一[1-2].
为缓解轮轨噪音与振动,自导向胶轮电车应运而生.这种轻轨电车主要采用胶轮承载,通过特殊导向机构使车辆沿直线运行与曲线转弯.由于自导向胶轮电车适应性强、噪声低、转弯半径小、爬坡能力强,且成本低、经济性能好等优点,近年来得到了迅速的发展[3].目前具有代表性的有法国Translohr生产的胶轮导轨电车、重庆正在使用的跨座式单轨、日本千叶市SAFEGE型悬挂式单轨车辆及法国胶轮地铁.本文对上述车辆结构形式、导向原理及适应性进行分析,为车辆选型提供理论依据.
1 胶轮导轨电车
1.1 技术特点
最具有代表性的胶轮导轨电车由法国Translohr生产,简称Translohr电车. Translohr电车由多节车体通过铰接组成,图1为三车体编组形式,由终端模块、乘客模块和中间模块组成.终端模块为驾驶室,下部为车辆的动力走行部;两乘客模块通过中间模块相连接,非动力走行部装于中间模块的下方.可以通过增加中间模块和乘客模块来增加客运量,这种模块组合模式克服了车辆长度受限不能满足载客量的限制,使得在拥挤的道路上增加载客量成为可能.
世界上第一条Translohr电车线路于2001年在法国克莱蒙费朗市开通运行,随后2007年中国天津滨海新区和意大利Padova修建完成并开通运行Translohr电车,同年中国上海浦东张江高科新区开工建造Translohr有轨电车线路, 2009年12月31日建成通车.近年来法国巴黎、巴黎南部Chatillon-Viroflay、哥伦比亚Medellin均修建完成Translohr电车线路,其中部分车辆列于表1.
Translohr有轨电车十分容易实现100%低地板,车内地板面距离地面仅为260 mm.车辆两端均设有司机室,便于车辆双向行驶,运行速度70 km/h.由于轮胎设置在中间模块处,可以最大限度的缩小车辆转弯半径,传统钢轮钢轨车辆转弯半径约25 m,而胶轮导轨电车转弯半径仅10.5 m,可极大的减小线路用地,增加其适用性.胶轮能够增加车辆与地面之间的黏着力,提高车辆的牵引与制动能力,爬坡能力增加,最大坡度可达到130‰,其爬坡能力比传统有轨电车提高了50%.为防止车辆在运行过程中车轮破损产生安全事故,在轮胎内部装有限滑移装置,其可以保证轮胎在完全失气的情况下车辆以25 km/h安全行驶.

图1 Translohr胶轮导轨电车Fig.1 Translohr urban rubber-tyred self-steering tram
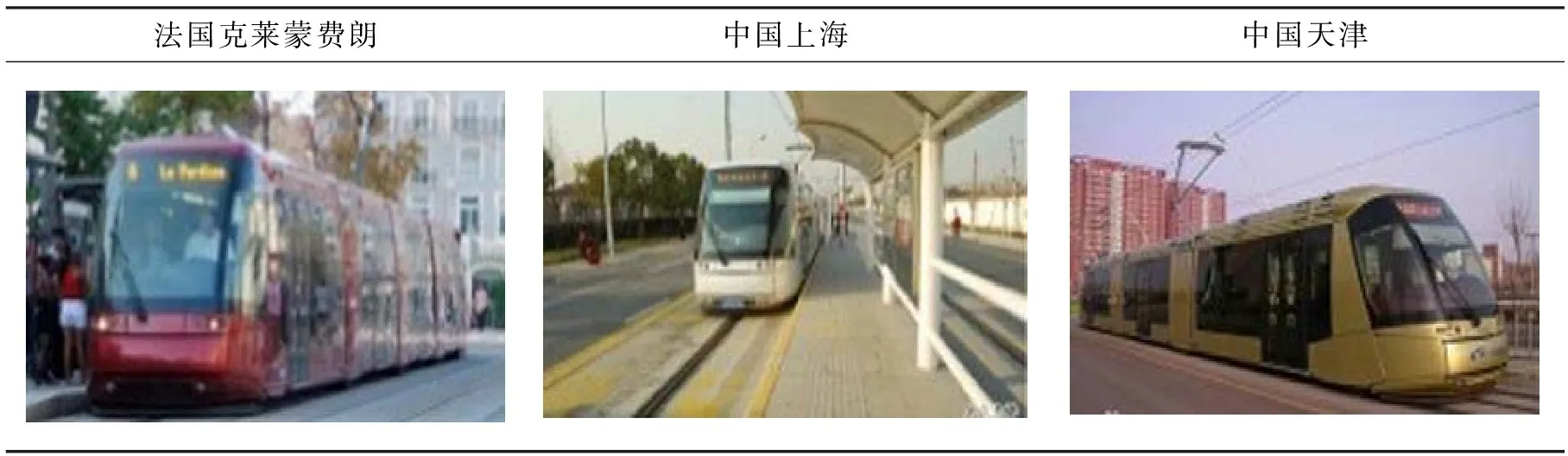
法国克莱蒙费朗中国上海中国天津
轮胎行走部分及轨道安装部分采用预制混凝土运行面如图2所示,用模具预制6 m长、0.3 m厚的混凝土直线或曲线段,采用机械方式连接起来,以避免各个模块之间的相对移动.对于预制路面安装可采用多种形式,例如纯混凝土路面、草坪装饰路面、合成草坪装饰路面、沥青路面等,均能够满足城市现代化建设及景观的要求.

图2 预制混凝土运行面Fig.2 Running surface of precast concrete
1.2 走行部
走行部作为车辆的重要组成部分,具有承载、牵引、制动、导向的作用.图3为Translohr电车的动力走行部,主要由动力轴桥、轮胎、导向机构组成,导向机构通过中心销与动力轴桥相连接,轮胎安装在轴桥端部的转向臂上,转向臂一端与转向杆铰接,转向杆另一端与导向机构铰接.转向臂、转向杆、导向机构、轴桥构成四连杆机构,当导向机构绕轴桥转动一定角度时,轮胎也会跟随转动进行转向通过曲线.
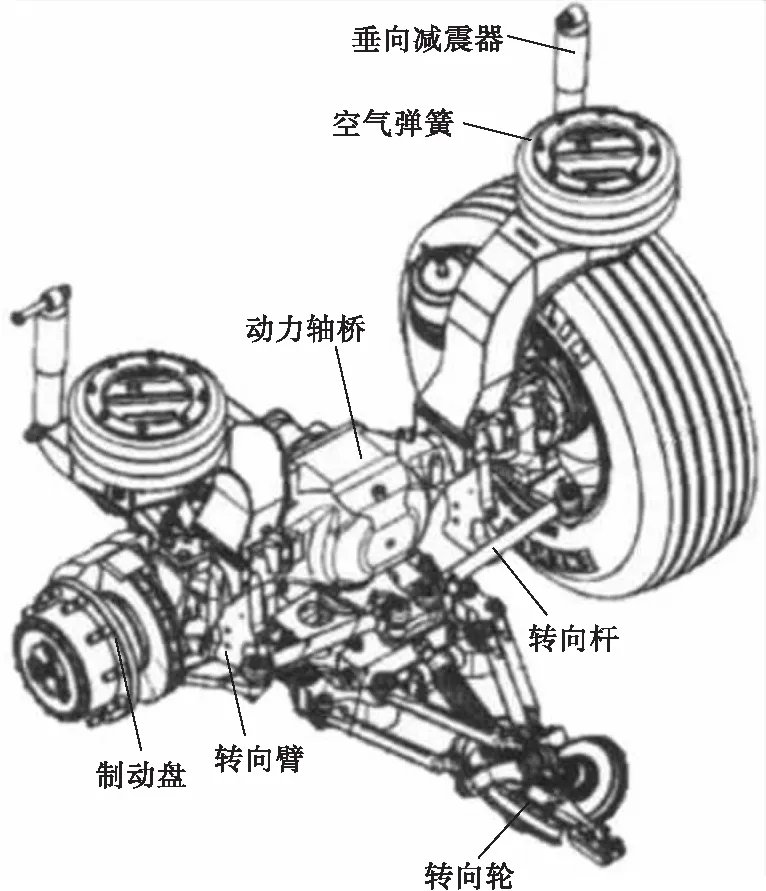
图3 动力走行部Fig.3 Powered running gear
导向机构如图4所示,导向轮呈V型布置并与倒V型导向轨配合.图4中导向连杆1、2、3与中间盘组成四连杆机构,通过横向位移限制器控制四连杆机构的横向锁定与释放,在正常运行情况下,沿运行方向的四连杆机构处于锁定状态,而相反方向的四连杆机构处于释放状态,处于释放状态的连杆机构不参与导向,仅起保护作用.
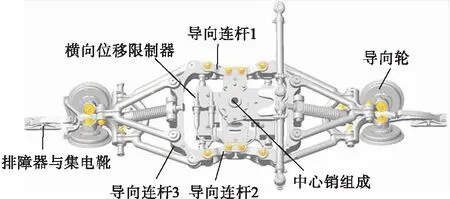
图4 动力走行部导向机构Fig.4 Guide mechanism of the dynamic running gear
非动力走行部结构较简单,如图5所示,轮胎直接铰接于轴桥上,仅能绕横向转动;导向机构连杆直接与轴桥相连接.动力与非动力走行部上的导向机构共同确保车辆曲线通过及直线运行的稳定性.
1.3 研究现状
虽然Translohr电车已实际运行一段时间,但对其研究还不够深入.文献[4]对Translohr电车的导向特性进行了研究,以单车为研究对象得到单车线性二自由度简化模型,研究导向机构长度及轮胎侧偏刚度对车辆横移、摇头运动频率、导向运动频率和阻尼比的关系.结果表明,轮胎的侧偏刚度越大,导向运动频率和阻尼比越高;导杆越长,导向运动的频率越低,但阻尼比越高.

图5 非动力走行部Fig.5 Non-powered running gear
文献[5]利用多体动力学分析软件建立整车动力学模型研究整车动力学,并分析其动力学性能影响因素,详细研究了导向轮与轨道之间间隙对导向力的影响,计算结果表明导向力随轮轨间隙的增加而减小,当轮轨间隙增加到一定程度时导向力不再变化,主要是由于车辆使用橡胶轮胎,轮胎具有一定的侧偏特性:当车辆通过曲线时由于离心力的作用车辆有向外运动的趋势,到轮轨间隙较小时则轮轨将会抑制车辆的侧偏,故导向力变大,而所有侧偏都作用在轮胎上时再增大轮轨间隙则对导向力不再有影响.目前,胶轮导轨电车正在迅速发展,中国中车股份有限公司正在自主研发一种胶轮导轨电车,导向机构是该车与Translohr电车的最大区别.新设计的导向机构如图6所示,采用双侧轮缘导向轮方式,采用多连杆和滑块来保证导向机构处于锁定和自由状态.

图6 导向机构图Fig.6 Guide mechanism
2 跨座式单轨
2.1 技术特点
跨座式单轨是一种中等运量的城市轨道交通系统,如图7所示.车辆编组一般为4、6或8,最高运行速度可达到80 km/h.每辆车坐落在两台转向架上,转向架跨坐在轨道梁上,采用走行轮传动并在转向架两侧设置水平轮胎导向和稳定车体[6].

图7 跨座式单轨Fig.7 Straddle monorail vehicle
跨座式单轨车辆结构形式与传统的钢轮钢轨形式有所不同,其具有如下特点:
(1) 轨道梁采用高架形式,且梁宽很小,支柱结构细长,占地面积小能有效利用城市空间,且乘客视野较好;
(2) 走行轮使用橡胶轮胎,与地面之间的黏着系数较大,故列车爬坡能力强;
(3) 由于转向架轴距较小,能够通过小曲线半径,增加在城市中的适应性;
(4) 转向架采用空气弹簧和橡胶轮胎,因而车辆振动较小,具有良好的乘坐舒适性;
(5) 车辆使用橡胶轮胎造成车辆行驶阻力较大,因此跨座式单轨列车要比普通城轨车辆耗能大;
(6) 由于车辆在高架轨道上行驶,故在车辆故障及特殊情况下旅客疏散难度较大.
2.2 轨道
跨座式单轨的轨道梁有钢制轨道梁和预制混凝土轨道梁两种,大多数采用标准的预制混凝土轨道梁,如图8所示,跨度一般为20~22 m,断面为工字型,由专用模具板制成.与传统的钢轨不同,跨座式单轨的轨道梁不仅具有承载和导向作用,同时也是牵引电网、信号系统等的载体.将各种结构件、信号设施、供电系统集成到轨道梁上,具有体积小、系统紧凑、工厂化生产、线路透明性好等优点.但是对设计、制造、安装调试也提出了更高的要求[7].

图8 预制轨道梁Fig.8 Prefabricated track beam
道岔是跨座式单轨交通系统的主要组成部分,常用的道岔有关节型道岔、关节可挠型道岔和平移式道岔.平移式道岔如图9所示是由我国自主研发,它具有构造简单、转辙迅速、列车运行流畅、制造维护成本低等优点.平移式道岔有直线和曲线两个道岔梁,道岔梁坐落在台车上,导向轨和导向机构控制台车的运动方向,台车在走形轨上运动,当列车需要变换轨道时,台车带动相应道岔通过定位机构定位后接入车辆正在行驶的轨道,完成车辆的变轨.
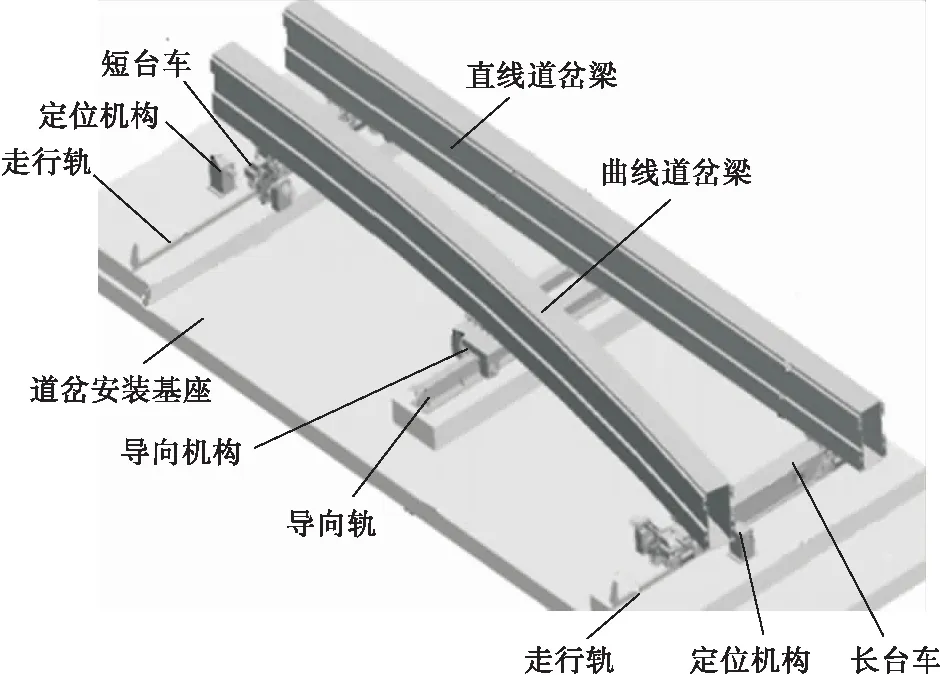
图9 跨座式单轨道岔Fig.9 Straddle monorail turnout
2.3 走行部
为保证车辆走行部在轨道梁上沿正确的方向安全行驶,走行部上装有4种轮胎:走行轮、导向轮、稳定轮、安全轮,如图10所示.

图10 跨座式单轨转向架Fig.10 Bogie of straddle monorail vehicle
跨座式单轨的走行导向机理与钢轮钢轨完全不同,每个走行部上有4个走行轮负责承担车体重量并沿轨道行走;依靠轨道两侧水平布置的4个导向轮导向;车辆在空中运行会受到横向风力等因素的影响,为使车辆运行更稳定,在走行部的下端设置稳定轮;为防止轮胎爆破后出现安全事故,在前后端梁处设置实心安全轮.
2.4 研究现状
跨座式单轨已有近百年的历史,针对其在使用过程中出现的问题进行了大量的研究:文献[8]运用有限元数值分析方法,对平移式道岔在列车运行过程中的结构安全性和力学行为进行分析,认为在列车运行过程中平移式道岔结构在长台车处产生最大应力,在长台车上部连接板的边缘处存在较大的集中应力;文献[9]通过多体动力学分析软件建立了整车动力学模型,研究悬挂参数对车辆动力学性能的影响,并依据浮心理论及动力学仿真分析,研究导向轮、稳定轮的预压力对车辆运行安全性和稳定性的影响.通过对车辆在使用过程中进行跟踪研究发现,车辆轮胎出现非正常磨耗且轮胎边缘磨耗较为严重,车辆使用维护成本增加.接下来对轮胎磨耗问题进行研究,提出相应的减磨措施.
我国跨座式单轨技术引进至今已有10多年,在项目国产化的实施过程中,掌握了部分核心技术,取得了部分创新性科技成果,对关键部件实施国产化,已经成为发展单轨交通的必由之路.
3 悬挂式单轨
3.1 技术特点
悬挂式单轨道由于其在空中运行又称为空中列车, 悬挂式单轨交通系统[10]的研究始于1893年,后在伍珀塔尔市(Wuppertal)应用,如图11所示,该车辆使用钢轮钢轨非对称式悬挂,通过悬挂点两侧重力力矩平衡原理使车辆能够安全地在单轨上行驶.

图11 伍珀塔尔(Wuppertal)悬挂式单轨Fig.11 Suspended monorail vehicle in Wuppertal, Germany
在悬挂式单轨交通的发展过程中,橡胶轮胎具有舒适性好、适应能力强、成本低等优点,得到了广泛的应用,表2为目前正在使用具有代表性的胶轮悬挂式单轨交通系统.与跨座式单轨车辆系统相似,胶轮悬挂式单轨交通系统均使用高架形式,但悬挂式单轨距离地面较高,建筑的体量感较大,轨道梁的墩柱对乘客造成一定的影响;造价低廉,仅需要0.5~1.5亿元/km,而地铁造价为7~8亿元/km,当客流量上升需要建造地铁时可将其拆下改建地铁,拆下来的部件可移到其它地方重复使用,具有良好的经济性;橡胶轮胎具有较大的黏着系数,故有很强的爬坡能力,并能适应于较小的曲线半径,高架适合在任何地形上建造,具有良好的地形适应性;橡胶轮胎具有良好的缓冲减振性能,噪声污染对建筑和周围环境影响小;走行部在箱型梁中行驶时对冰雪天气具有良好的适应性.

表2 悬挂式单轨交通系统Tab.2 Suspended monorail transit system
由于车辆在空中行驶,当出现紧急情况时旅客救援难度较大,为此悬挂式空中列车系统提出了完善的救援措施:纵向救援、横向救援和落地逃生.纵向救援是派遣救援车辆前往故障地点,故障车与救援车前后相连接,乘客进入救援车,由救援车将乘客运至车站;横向救援是将救援车与故障车车门对齐平行停放,乘客通过踏板转移至救援车后载离;落地逃生是指通过绳索、帆布、救火车云梯等将乘客转移至地面的方式.
3.2 走行部
图12为日本千叶市悬挂式单轨车转向架,是最具有代表性的悬挂式单轨交通系统之一.该转向架由构架、空气弹簧、摇枕、橡胶轮胎、牵引及制动装置组成.在构架4角安装有4个导向轮,走行轮安装在转向架两侧.车体悬挂装置通过构架中心孔后与摇枕相连接,悬挂装置由悬挂杆、吊管及安全钢索组成,当悬挂杆发生破坏后安全钢索起到安全保护作用.

图12 千叶市单轨车转向架Fig.12 Bogie of suspended monorail vehicle in Chiba, Japan
千叶市单轨交通系统的走行原理如图13所示.走行轮与箱型轨道梁的内侧底面相接触,具有牵引制动的作用;导向轮与轨道梁的侧面接触,在运行的过程中起到导向和稳定走行部的作用;车体悬挂在摇枕上,在车体和摇枕之间装有液压减振器和橡胶止挡,以增加车辆的乘坐舒适性.

图13 千叶市单轨原理图Fig.13 Principle diagram of the suspended monorail vehicle in Chiba, Japan
3.3 研究现状
虽然悬挂式单轨在国内尚无使用案例,但国内已对其做了大量的研究,为悬挂式单轨交通系统的工程应用提供了理论依据和参考.文献[11]根据多体动力学理论,建立了千叶市SAFEGE型悬挂式单轨车动力学模型,研究导向轮预压力对车辆临界速度和曲线通过的影响,并对车辆的平稳性进行优化.文献[12]利用有限元方法对悬挂式单轨系统轨道梁结构优化设计,分析直线和半径为100 m的曲线轨道梁走行面的翻转、垂向挠、轨道梁扭转等变形情况.并讨论了轨道梁在外界载荷作用情况下,不同跨度、加强筋间距和钢板厚度对轨道梁变形及1 km梁架桥用钢量的影响.
2009年,荷兰一公司和德国H-Bahn公司针对中国市场合作创建国际空列集团,并和国内轨道交通行业的一流企业组成联合体,在中国及整个亚太地区推广悬挂式单轨空中列车.目前佛山市、温州市已有悬挂式单轨交通系统规划,上海、济南、天津、武汉、苏州、青岛、贵阳、温州等城市也有建设悬挂式空中列车的明确意向,相信在不久的将来悬挂式单轨将在国内建成并投入使用.
4 胶轮地铁车辆
4.1 技术特点
地铁车辆在地下行驶,轮轨噪声与振动对周围建筑和居民产生了严重的影响,钢弹簧浮置板、梯形减振轨枕道床技术等减振技术并不是十分理想,而胶轮地铁采用橡胶轮胎,能够较大程度地缓解噪声与振动.
胶轮地铁是一种使用相匹配的轨道和专门导向装置的地铁系统,目前具有代表性的有两种胶轮地铁:法国胶轮地铁和日本胶轮地铁.法国胶轮地铁是在传统的钢轮钢轨基础上增设走行系统和导向系统构成,如图14所示.这种胶轮地铁需要两套走行装置即钢轮钢轨系统和胶轮走行系统,转向架结构较为复杂,自重大,同时与传统的钢轮钢轨相比由于使用橡胶轮胎负荷受限,承载能力低,运行过程中消耗能量较多.因此这种胶轮地铁在世界上使用并不多,仅在法国、墨西哥等国家的一些城市采用.

图14 法国胶轮地铁Fig.14 French rubber-tyred metro
日本札幌市使用的是另外一种类型的胶轮地铁,车辆行驶采用纯胶轮走行模式,行驶在混凝土等材质的带形轨道上,如图15所示.在轨道中央设置T形钢质导向轨,列车水平导向轮夹行于导向轨,引导车辆沿直线和曲线行驶.这种胶轮地铁完全摒弃了钢轮钢轨系统,车辆及轨道系统大大简化.
4.2 走行部
法国胶轮地铁走行部如图16所示,在正常运行工况下使用胶轮走行系统,车轮行驶在一对平行宽翼工型钢或者混凝土筑成的平板轨道上,两条平板轨道分别设置在钢轨的外侧;在轮胎发生漏气或者爆裂故障时钢轮钢轨起到安全保护作用,此外当车辆经过道岔区段时,侧面导向轨中断,在此区段由钢轮钢轨代替,作为导向和胶轮承载走行系统.

图15 日本胶轮地铁Fig.15 Japanese rubber-tyred metro

图16 法国胶轮地铁走行部Fig.16 Running gear of French rubber-tyred metro
日本胶轮地铁与法国胶轮地铁的最大区别是没有采用钢轮钢轨系统,而是在橡胶轮胎内部装有安全辅助轮,如图17所示,当轮胎发生漏气或爆裂故障时起到保护作用.

图17 带有安全辅助轮的轮胎Fig.17 Tyre with safety wheel
5 其他车辆
20世纪80年代,在德国曼海姆曾使用一种路边挡导向巴士,如图18所示.在传统巴士的车轮处安装水平的导轮及拐臂,通过垂直的街道路边挡进行导向.由于这种导向巴士需要专门的路边挡,且是在传统巴士基础上改造的,故承载能力受限,现存的使用案例不多,澳大利亚的阿德莱德使用得较为成功.

图18 路边挡导向巴士Fig.18 Kerb-guided bus
随着科技的发展,智能交通系统得到了迅速发展,图19为一种采用光学导向的有轨电车.在车辆底部装有光学检测装置,检测地面迹线方向,通过内部传动装置使车轮转向,保证车辆沿迹线方向行驶.车辆在城市中运行时,由于人员、路况复杂,尤其是在雨雪天气和导向迹线发生破坏时,这种导向方式的安全性难以保证,故光学导向有轨电车并没有大量投入使用.

图19 光学导向电车Fig.19 E-bus rapid transit
6 结束语
为了缓解日益恶化的城市交通问题,国内数十座城市已经建成或正在兴建城市轨道交通系统,但这些轨道交通系统基本都是使用的钢轮钢轨系统,虽然传统的轨道系统有诸多优点,但是建设成本高、工期长,建成后由于轮轨振动产生的噪声等对周围生态环境影响严重.新型城市自导向胶轮电车则具有很多独特的优点:建设成本低、工期短、具有更高的加速及减速率,因为轮胎本身与路面具有较强黏着能力,列车可轻易爬行陡峭的斜坡且转弯半径小,对城市地表起伏大、道路崎岖的情况有很好的适应性,自导向胶轮电车使城市轨道的使用范围更广.
由于橡胶轮胎负荷受限、承载能力低,故自导向胶轮电车属于轻轨运输或中型运输系统,不适合在交通运输极其繁忙的地方使用.所以各地在选择自导向胶轮电车时应当根据其特点进行合理选型,不应该盲目追新求异.
胶轮自导向电车在我国尚处于起步阶段,从目前上海张江Translohr电车及重庆跨座式单轨的运行情况来看,由于车辆系统的国产化率不足,导致车辆在建设、日常运营及维护方面存在诸多困难,特别是其运营成本高已严重影响胶轮自导向电车的发展.为使胶轮自导向电车在我国能够得到长远发展,高校、科研单位及相关企业需要联合起来,实现车辆系统的国产化.
[1] 刘加华,练松良. 城市轨道交通振动与噪声[J]. 交通运输工程学报,2002,2(1): 29-33.
LIU Jiahua, LIAN Songliang. Vibration and noise of the urban rail transit[J]. Journal of Traffic and Transportation Engineering, 2002, 2(1): 29-33.
[2] 杨阳,李芾,戚壮,等. 弹性车轮动力学复模型及其性能研究[J]. 中国铁道科学,2015,36(4): 93-99.
YANG Yang, LI Fu, QI Zhuang, et al. Dynamics composite model and performance study of elastic wheel[J]. China Railway Science, 2015, 36(4): 93-99.
[3] BALASUBRAMANIAN M. Cure modeling and mechanical properties of counter rotating twin screw extruder devulcanized ground rubber tire-natural rubber blends[J]. Journal of Polymer Research, 2009, 16(2): 133-141.
[4] 任利惠,胡亮亮,侯件件,等. 劳尔有轨电车的导向特性[J]. 城市轨道交通研究,2013,16: 53-58.
REN Lihui, HU Liangliang, HOU Jianjian, et al. Steering mechanism of translohr tram[J]. Urban Mass Transit, 2013, 16: 53-58.
[5] 杨阳,李芾. 胶轮导轨电车导向机构可行性分析报告[R]. 成都:西南交通大学,2015.
[6] KAWATANI M, KAMIZONO T, CHANG H L, et al. Dynamic response analysis of monorail bridges under moving trains and riding comfort of trains[J]. Engineering Structures the Journal of Earthquake Wind and Ocean Engineering, 2005, 27(14): 1999-2013.
[7] 马继兵,蒲黔辉,霍学晋. 跨座式单轨交通PC轨道梁车桥耦合振动分析[J]. 西南交通大学学报,2009,44(6): 806-811.
MA Jibing, PU Qianhui, HUO Xuejin. Vehicle-bridge coupling vibration analysis of PC rail beam of straddle-type monorail transportation[J]. Journal of Southwest Jiaotong University, 2009, 44(6): 806-793.
[8] 卢明奇,杨庆山,何希和,等. 跨座式单轨平移式道岔结构数值仿真分析[J]. 中国铁道科学,2012,33(1): 13-18.
LU Mingqi, YANG Qingshan, HE Xihe, et al. Numerical simulation analysis of the translational turnout in the straddle type monorail[J]. China Railway Science, 2012, 33(1): 13-18.
[9] 张建全. 跨座式单轨车动力学研究[D]. 成都:西南交通大学,2009.
[10] CEDER A, ROBERTS M, SCHERMBRUCKER R. Investigation of skycabs monorail system in urban regions[J]. Journal of Transportation Technologies, 2014, 4(1): 96-113.
[11] 许文超. 悬挂式单轨车动力学性能研究[D]. 成都:西南交通大学,2014.
[12] 潘西湘. 悬挂式单轨系统轨道梁结构优化设计研究[D]. 成都:西南交通大学,2014.

李芾(1956—),教授,博士, 博士生导师,1999年起至今任职于西南交通大学机械工程学院,现任机械工程学院机车车辆工程系主任.研究方向为轨道交通车辆结构及动力学分析、机车车辆设计理论、城市轨道交通装备技术.承担国家科技支撑计划项目、国家863计划项目和企业横向课题50余项.国家长江学者,担任中国铁道学会牵引动力委员会、车辆委员会委员.
E-mail: lifu@home.swjtu.edu.cn

杨阳(1991—),博士研究生, 2014年起至今在西南交通大学机械工程学院攻读博士学位.主要研究方向为机车车辆设计理论、轨道交通车辆系统动力学理论、轮轨接触理论.
E-mail: yyxnjd@163.com
(中文编辑:秦萍玲 英文编辑:兰俊思)
Characteristics and Application of Urban Rubber-Tyred Self-Steering Trams
LIFu,YANGYang
(School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
The application and development of urban rubber-tyred self-steering trams across the world are reviewed. Taking as examples the typical rubber-tired Translohr tram in France, the straddle monorail vehicle in Chongqing, China, the suspended monorail vehicle SAFEGE in Chiba, Japan and the rubber-tired metro MP in France, the technical characteristics, running gear and related research status of rubber-tyred vehicles are analyzed. Currently, researches on urban rubber-tyred trams are focused on the guide mechanism, dynamic performance and guide structure innovations. Compared with the traditional electric vehicles, urban rubber-tyred self-steering vehicles have the advantages of less noise, higher gradeability (nearly a 50% increase), smaller curving radius and smaller footprint; and hence can save urban land use and increase the adaptability to different urban terrains, with a medium transport capacity. However, the research and application of urban rubber-tyred self-steering vehicles in China are still in the initial stage. Further research should be focused on mitigation of tyre wear, design of reliable and efficient guide structures, and formulation of relevant standards. Experiences of operating Translohr tram in Zhangjiang (Shanghai) and Straddle type monorail in Chongqing indicate that realization of domestic manufacturing of the vehicles’ key components is the prerequisite for the sustainable development of rubber-tyred self-steering trams in China.
rubber-tyred self-steering trams; technical characteristics; running gear; localization
2015-08-28
李芾,杨阳. 城市自导向胶轮电车技术特点与应用[J]. 西南交通大学学报,2016,51(2): 291-299.
0258-2724(2016)02-0291-09
10.3969/j.issn.0258-2724.2016.02.009
U273.1
A
