一种空间视觉测量子系统用半导体激光器驱动电路设计*
2016-04-06王东宁华宝成龚德铸赵春晖
王东宁,张 琳,华宝成,2,郑 岩,2,龚德铸,2,赵春晖,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
一种空间视觉测量子系统用半导体激光器驱动电路设计*
王东宁1,张 琳1,华宝成1,2,郑 岩1,2,龚德铸1,2,赵春晖1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
为提高视觉测量子系统抗杂光干扰能力,保证测量精度、稳定性和可靠性,通常需要采用半导体激光二极管组成的照明光源对测量区域进行照明.提出一种半导体激光二极管恒流源电路设计,并实现了激光二极管开关延时软启动、恒流驱动、过流保护等功能.实测数据表明,恒流源电路具有高稳定、高可靠和高精度的特点.
空间视觉测量;照明单元;激光二极管;恒流驱动
0 引 言
空间视觉测量子系统是由安装在追踪飞行器上的视觉测量相机和安装在目标飞行器上的合作目标构成的光电测量子系统,主要用于交会对接最后靠拢到对接完成阶段的相对运动参数测量[1].空间视觉测量子系统在轨工作时,为避开太阳光干扰,除了选择在太阳光辐射相对较弱的近红外窄谱段工作外[2],还采用同一近红外谱段的照明单元对测量区域进行照明,达到凸显感兴趣的目标特征,抑制无用的特征信息的目的,以提高空间视觉测量子系统测量的精度和可靠性[3].
激光二极管(laser diode,LD)因其体积小、质量轻、功耗低、发光效率高的优点,被广泛地应用于空间视觉测量子系统照明光源上.LD是一种电流驱动型器件,微小的驱动电流变化将会使其输出光功率较大的变化,因而其输出光功率大小及稳定性、工作可靠性与驱动电源性能直接相关.此外,电流瞬变、浪涌电流、上电瞬间过压、静电放电等均可能对LD造成潜在损伤乃至永久失效.对于性能和可靠度要求高的空间应用场合,不仅需要考虑LD驱动电路性能,还必须针对采取专门的可靠性设计措施,以避免对LD造成潜在损伤或永久失效.本文介绍了一种空间视觉测量用激光二极管恒流驱动电路以及延时软启动、限流保护等可靠性设计,给出了试验验证结果.
1 总体设计
(1)LD工作模式选择
LD通常可以在恒流或恒功率两种模式下工作,均是利用负反馈闭环机制控制LD发光,达到稳定LD输出光功率的目的.前者通过对LD驱动电流采样,利用负反馈闭环控制电路实现恒流驱动LD发光;后者通过LD内部集成的光电二极管(photo diode,PD)对谐振腔内激光功率采样,将之转化为电信号,利用负反馈控制闭环电路,实现LD发光功率恒定.
由于PD为LD内置器件,可靠度较低,若PD失效则整个控制闭环失效.而恒流工作模式下可通过选择高等级元器件来实现负反馈闭环控制电路,易于实现电路的可靠性.考虑空间使用的高可靠度要求,选择恒流模式作为LD发光控制模式.
(2)LD保护方案
LD对开启或关断时电压/电流的瞬变、浪涌电流、ESD、反射电流、正向过流等工况均非常敏感,会造成LD潜在的损伤甚至永久失效.为此,电路设计采取如下LD保护方案:1)对于LD开启或关断时引起的电压、电流瞬变,设计延时软启动电路保证LD的驱动电压或电流缓慢变化;2)在LD两个电极并联电容以滤除高频干扰;3)在LD两端反向并联肖特二极管以避免反向浪涌对LD造成的致命损坏; 4)在LD两端并联一个低接触电阻短路开关,LD驱动电路不工作时,将之短接,以起到保护LD作用; 5)设计限流电路防止 LD驱动电流超过规定最大值.
激光二极管恒流驱动电路由光功率设置、恒流驱动、延时软件启动、限流保护、健康状态监测等模块组成,其系统原理框图如图1所示.发光功率设置模块在一片FPGA的控制下进行激光二极管的发光功率切换.延时软启动模块用来保护激光二极管开关和功率切换时不会受到大脉冲电流冲击损伤,提高工作可靠性,限流保护模块用来保证激光二极管工作在安全工作电流范围内.光功率设置模块用于选择电流驱动部分的驱动电流设定值,以控制LD的发光功率;恒流驱动模块用于为激光二极管提供高稳定度的驱动电流,以保证发光功率的稳定性.健康状态监测模块用来实时采集驱动电压/电流、LD温度等状态信息.
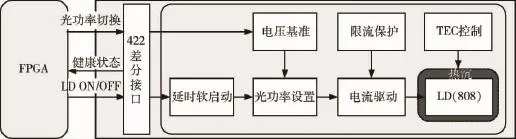
图1 LD恒流驱动与温控电路原理框图Fig.1 Constant-current driving circuit functional block diagram
2 主要电路模块设计
2.1 LD开/关延时软启动保护电路
命令延时软启动电路原理图如图2所示.其功能是抑制当LD打开或关闭时带来的电流瞬变,保证LD驱动电流缓慢地变化,保护LD不受电流瞬变的损坏.
当START开关控制信号由高电平变为低电平时,Q13三极管导通,电容C46开始充电,Q14的栅极由低逐渐升高,当升高到某个阈值时,Q14导通,光功率设置电压Vo缓慢降为0 V,LD不发光.当START开关控制信号由低电平变为高时,Q13三极管截止,电容C46通过R29开始放电,Q14栅极电压逐渐降低,Vo逐渐升高,当栅极电压小于场效应管阈值电压时,Q14截止,Vo升到光功率设置电压PresetV,LD以预设定的光功率发光.通过命令延时软启动和光功率设置模块控制,实现了当LD开关时均以缓变的方式开和关,达到了保护LD不会受到电流瞬变损坏的目的.
2.2 LD驱动及限流保护电路设计
LD驱动与限流保护模块主要完成功能有:保证流过LD的电流不超过最大值以免损坏LD;根据光功率设置电压产生相应的驱动电流,驱动LD发光;保证LD驱动电流的稳定性和精度.
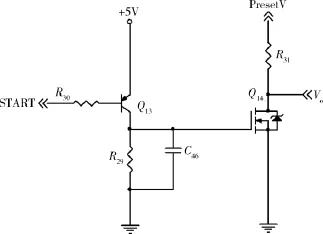
图2 延时软启动电路原理图Fig.2 Delay start circuit schematic diagram
驱动与限流保护模块原理图如图3所示.
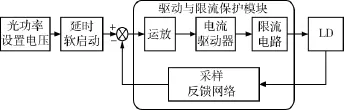
图3 驱动与限流保护模块原理框图Fig.3 Diagram of drive and current restriction and protection module
图4中Vo为光功率设置电压,由命令延时软启动和光功率设置模块控制.Rs为精密采样电阻,与U12一起构成采样环节,通过对流过Rs的LD电流进行采样,送入控制闭环进行恒流控制.图中U11、Q18与采样环节一起在Vo电压控制下实现恒流控制,从而保证LD以恒定功率发光.而U10、Q20与采样环节在Vmax电压控制下同样实现恒流控制,但Vmax根据LD允许通过的最大电流设定.当Vo为正常设定值时,它小于Vmax,流过LD的电流为两个恒流源中允许输出电流的较小者.当Vo大于Vmax时,流过LD的电流为被限制在最大允许电流值,从而保护LD不受损害.
此外,从图4中可以看出,LD两端并联了电容、开关和反相肖特基二极管,其作用为:1)电容用来滤除高频干扰,避免其对LD造成损坏;2)反相肖特二极管用来消除反相浪涌电流对LD的影响;3)低阻抗开关用于地面调试、转运环节,当LD不工作时对LD两端短接,达到保护LD目的.
通过上述措施,提高LD驱动电路的性能及可靠性.
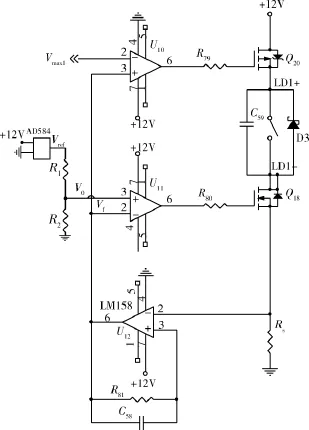
图4 驱动与限流保护电路原理图Fig.4 Drive and current restriction and protection circuit
3 LD驱动电路控制精度分析
根据图3及相关模块的电路原理图可得出,LD驱动电流ILD:

式中:Rs为LD电流采样电阻;Vo为光功率设置电压;Voffset为运放失调电压;Vref为基准电压;R1、R2为基准电压串联分压电阻.
由式(1)可得到误差传递公式:

由于R1、R2在0.6~1 kΩ范围内,因此式(3)中最后两项远小于前三项,该式可进一步简化为:
从式(4)可以分析得到影响LD驱动电流精度和稳定性的主要因素有:1)基准电压稳定性;2)闭环回路中运放的输入失调电压;3)采样电阻精度.
根据以上分析结果,在电路设计中时充分考虑相关器件参数对LD驱动电流精度的影响,尽可能地选择了高精度元器件,详见表1所示.

表1 影响LD驱动电流精度的关键器件的技术指标Tab.1 Parameters of apparatus influenced the LD driving current precision
根据式(4)可以得到驱动电流相对稳定度为:

4 试验验证
为验证设计的有效性,对研制的驱动电路关键指标进行了测试,根据对LD保护需要的延时时间以及整机对发光功率响应实时性要求,调整图2中R29和C46参数即可获得合理的延时软启动效果.空间视觉测量子系统中照明单元实现的延时启动测试结果如图5所示,可见在1.36 ms的时间内,驱动电流上升到稳态电流的90%,既对LD起到了保护作用又能满足整机时序要求.
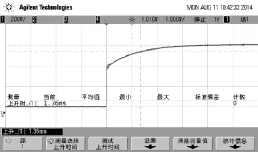
图5 空间视觉测量子系统照明单元延时启动性能测试Fig.5 Space vision measurement subsystem illuminating light source delay start test result
不同发光功率及其稳定性是LD驱动电路性能的核心指标,对本文设计的LD驱动电路在100 mW及400 mW照明功率下的光功率进行测试,测试结果如图6所示.可见100 mW光功率档位实际发光功率约104 mW,400 mW光功率档位实际发光功率约402 mW,均满足稳态发光功率偏差不超过±5%指标要求.LD驱动电流与发光功率成线性关系,驱动电流每增加1 mA发光功率增大约1 mW,因此发光功率稳定性即为驱动电流稳定性.试验结果表明发光功率稳定性(即控制精度)分别为(104.7-103.8)/104=0.86%,(402.4-400.8)/402= 0.39%.可见驱动电流实际控制精度与理论分析较为一致,说明LD照明驱动电路设计功能性能均达到了预期指标.
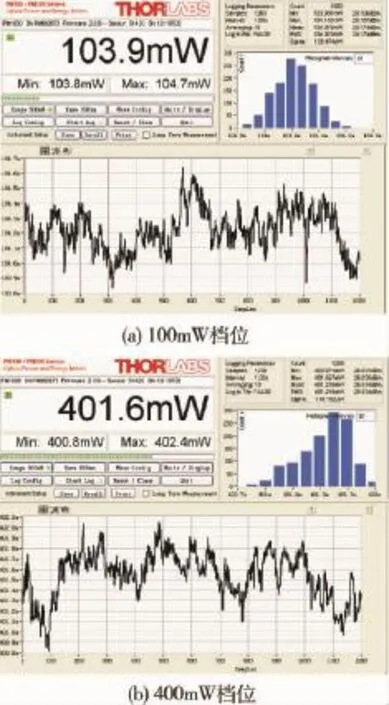
图6 空间视觉测量子系统照明单元光功率及其稳定性测试结果Fig.6 Test results of power and stability of laser driving circuit used in space vision measurement subsystem
5 结束语
提出一种空间视觉测量用半导体激光二极管恒流源电路设计方法,针对空间环境特殊要求和器件特性,选择了恒流驱动工作模式,设计并实现了开关延时软启动、过流保护等功能,确保了电路长期工作可靠性.设计的恒流驱动电路实现了发光功率可调,发光功率精度的测试结果与理论分析水平基本一致,实现了预期的功能及性能指标要求.
[1]赵春晖,高文文,刘鲁,等.神舟八号飞船交会对接CCD光学成像敏感器[J].空间控制技术与应用,2011,37(6):7-14.ZHAO C H,GAO W W,LIU L,et al.A vision guidance sensor for SZ-8 spacecraft autonomous rendezvous and docking[J].Aerospace Control and Application,2011,37(6):7-14.
[2]赵春晖,龚德铸,刘鲁,等.空间杂光对交会对接光学成像敏感器影响分析[J].空间控制技术与应用,2012,38(3):1-4.ZHAO C H,GONG D Z,LIU L,et al.Analysis on influence of space stray light on vision sensor for autonomous rendezvous and docking[J].Aerospace Control and Application,2012,38(3):1-4.
[3]龚德铸,赵春晖,张琳,等.交会对接光学成像敏感器的LD照明系统[J].空间控制技术与应用,2014,40 (5):57-62.GONG D Z,ZHAO C H,ZHANG L,et al.LD lighting system for camera-type rendezvous and docking sensor[J].Aerospace Control and Application,2014,40(5): 57-62.
[4]张淑琴.空间交会对接测量技术及工程应用[M].北京:宇航出版社,2005.
[5]DAVIS C C.Laser Fundmentals-激光基础[M].北京:电子工业出版社,2003:12-28.
[6]王德,李学千.半导体激光器的最新进展及其应用现状[J].光学精密工程,2001,9(3):279-283.WANG D,LI X Q.New progress in semiconductor lasers and their applications[J].Optics and Precision Engineering,2001,9(3):279-283.
[7]黄德修,刘雪峰.半导体激光器及其应用[M].北京:国防工业出版社,1999.
[8]何成林.半导体激光器驱动电路设计[J].科学技术与工程,2009,9(21):6532-6535.HE C L.Design of driving circuit of LD[J].Science Technology and Engineering,2001,2009,9(21):6532-6535.
Design of Laser Diode Driving Circuit Used in Space Vision Measurement Subsystem
WANG Dongning1,2,ZHANG Lin1,2,HUA Baocheng1,2,ZHENG Yan1,2,GONG Dezhu1,2,ZHAO Chunhui1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China;2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China)
To improve the reliability,accuracy and stray light suppression ability,laser diode is commonly used for illumination of space vision measurement subsystem which is used in rendezvous and docking and on-orbit operation mission.A design of laser diode driving circuit is proposed,the delayed start ability,constant-current driving and over-current protection are realized.Experimental results validate the high stability reliability and high accuracy of proposed designing.
space vision measurement;illuminating light source;laser diode;constant-current driving
V44
:A
:1674-1579(2016)02-0049-04
10.3969/j.issn.1674-1579.2016.02.009
王东宁(1957—),男,工程师,研究方向为空间视觉敏感器电路设计;张 琳(1983—),女,工程师,研究方向为空间视觉敏感器电路设计;华宝成(1982—),男,高级工程师,研究方向为空间视觉测量技术;郑 岩(1983—),男,高级工程师,研究方向为空间视觉测量技术;龚德铸(1977—),男,高级工程师,研究方向为空间视觉测量及光电探测技术;赵春晖(1972—),男,研究员,研究方向为空间视觉测量及光电探测技术.
*国家自然科学基金资助项目(61174004).
2015-11-30
