基于模糊自适应PID控制的矿用潜水泵电机软启动器
2016-03-30魏磊
魏磊
【摘 要】针对矿用高压潜水泵电机在启动过程中存在的过电流问题,本文提出采用模糊自适应PID控制可变电抗器的高压电机软启动控制策略。本系统的核心采用高性能电机控制芯片TMS320F2812,配合电压检测、电流检测等外围电路,实现了高压电机的电流闭环控制。仿真结果证明,与传统电抗器限流软启动相比,该软启动器能使电机在启动初始阶段更加有效地降低启动电流的冲击,使电机平稳启动。
【关键词】高压电机,潜水泵;模糊自适应;可变电抗器;软启动
【Abstract】For the problem of shock and over current and voltage sage of mine high-voltage submersible motor in the process of start.Studying a soft start based on fuzzy adaptive PID control mode of high voltage asynchronous motor with variable reactor.The core of this system adopts high performance motor control chip TMS320F2812, cooperate to detect voltage, current and other peripheral circuit, realizes the high voltage motor current closed loop current limit control, and the hardware structure is given.The simulation results show that compared with the traditional reactor current limiting soft start, the motor in the initial stage can be more effective in reducing the impact of the starting current and also make motor start smoothly.
【Key words】High-voltage motor; Submersible pump; Fuzzy self-adaptive PID; Variable reactor; Soft start
0 引言
随着煤矿开采由浅部向深部发展,近年来煤矿透水事故频繁发生,因此其对井下排水泵的自动化控制水平的要求不断提升。在煤矿井下如果直接启动水泵,其高压大功率电机在启动过程中产生的电流冲击容易引起配电网局部母线电压的瞬间凹陷,继而触动配电网络继电保护,使之误动作,同时冲击电流产生的热效应使电机的定子绕组温升过大,使电机绕组极易短路,使电机的使用寿命缩短。
煤矿常用的可变电抗式软启动器多采用常规限流软启动,但是这种启动方式仍然不能很好的抑制启动电流。因此,本文在原有可变电抗式限流启动的基础上引入模糊自适应PID控制策略,采用DSP作为微处理器,配合电压、电流检测电路,实现电流的闭环控制。仿真结果证明,新型软启动器可以使电机的启动过程优化,减小启动电流的冲击。
1 模糊自适应PID控制软启动系统总体结构
1.1 控制系统的总体结构
本系统由可变电抗器、晶闸管功率变换单元(SCR)、三相交流电源、电压及电流检测电路、驱动单元和模糊自适应PID控制系统、键盘和显示器等单元组成。
其中,采用具有高速和高精度处理能力的DSP处理器TMS320F2812作为本系统的核心芯片。
1.2 控制系统的工作原理
可变电抗器的高压绕组与电机的定子绕组串接,低压绕组与晶闸管功率变换单元连接,组成阻抗控制回路。DSP微处理器实时在线采集电机启动电流并与给定限流值进行比较,计算出晶闸管触发角的相移量,经驱动单元,控制功率变换单元中晶闸管的通断,控制可变电抗器的低压绕组的阻抗值,并通过阻抗变换,改变电抗器与电机串接的高压侧阻抗值,以改变整个高压回路阻抗值,进而控制电机启动电流。
2 模糊自适应PID控制器设计
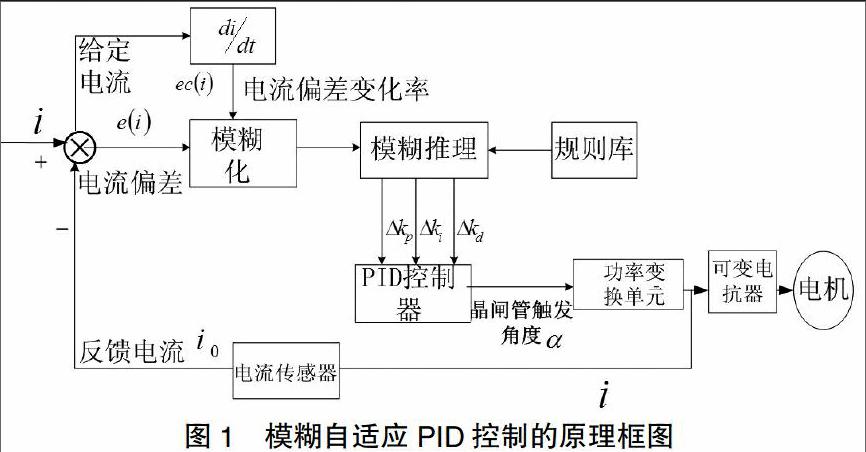
本文引入模糊自适应PID控制,运用模糊控制的基本理论和方法,对常规PID的参数进行在线自整定,控制晶闸管触发角相移量的输出,能够提高可变电抗器阻抗变换的精度,实现更加精准的控制。其控制原理图如图1所示。
2.1 输入和输出选取
以实际采集到的电机定子绕组电流与限定的启动电流的偏差e(i)和其偏差变化率ec(i)为模糊控制器的输入,经模糊化后,依据规则库设定的控制规则,经由模糊推理在线整定PID的3个参数。
2.2 模糊子集和论域的设定
3 系统仿真与结果分析
为了验证本文所提出的基于模糊自适应PID控制策略的软启动性能,以220kW、6kV三相鼠笼式电机为研究对象,在MATLAB中分别建立常规软启动方式下和模糊自适应PID软启动方式下的仿真模型,并采用电流闭环的限流控制。
仿真中的实验电机选取三相鼠笼式高压异步电机,其主要参数为:额定功率220kW,额定电压6kV,频率为50Hz,额定电流为32A,定子绕组电阻为1.83Ω,定子漏感为0.0358H,每相折合电阻为3.71Ω,折合漏感为0.0358H,励磁电感为0.9872H极对数为2。
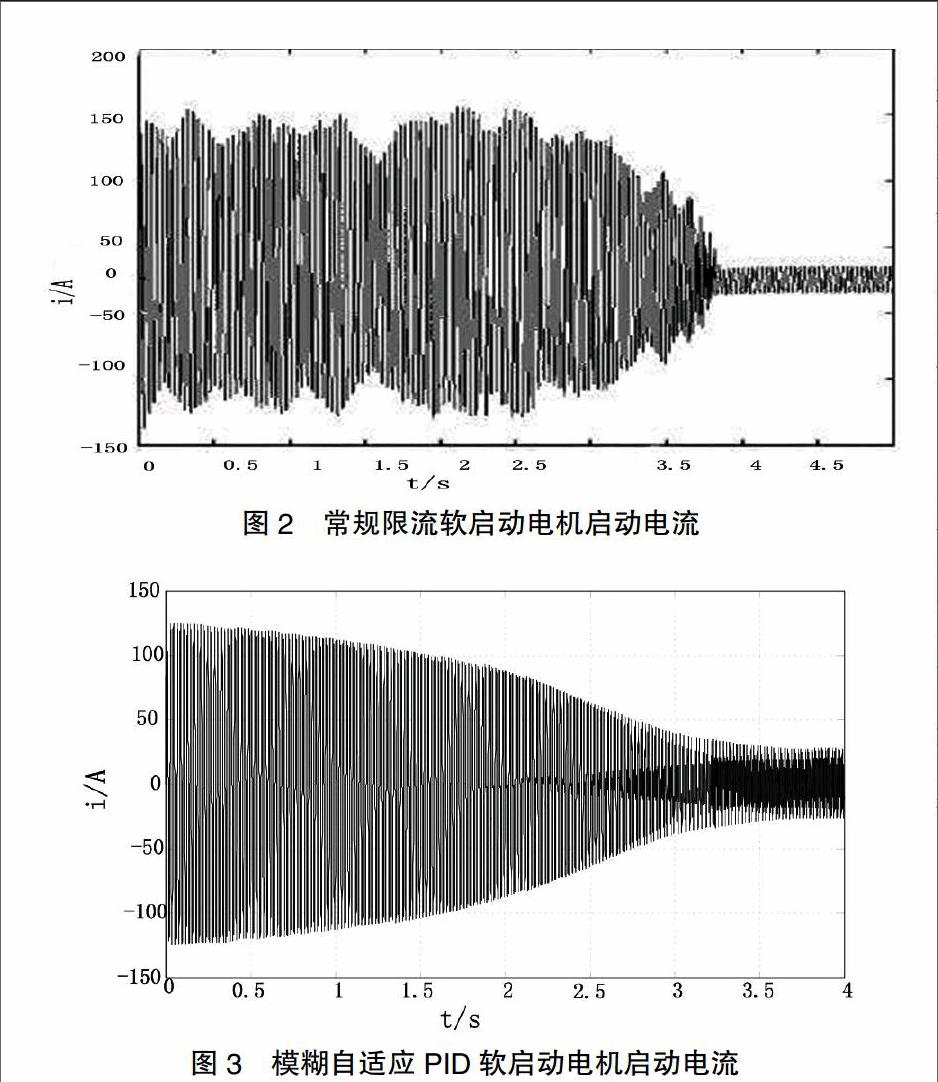
3.1 常规限流软启动
图2为常规限流软启动方式下5秒内的启动电流仿真波形。分析波形可知,启动阶段,电流最大值为150A,在1.6秒电流达到设定值120A,在3.7秒左右完成启动。整个启动过程,电机电流随电机转速上升逐渐减小,在电机转速将要达到额定转速时,电流迅速下降到实际运行电流;同时在启动过程中电流波动较大,启动不平稳。
3.2 模糊自适应PID软启动
图3为模糊自适应PID软启动在4秒内的启动电流。启动初始阶段,最大电流为122A,在0.3后电机的启动电流达到初始设定值120A,启动电流随着时间平滑的减小,电机平稳的加速,在3.8秒左右电机定子电流迅速降低到额定电流值,电机达到额定转速。
由图2和图3比较可得,引入模糊自适应PID控制策略的软启动相比于传统的软启动,在3.7~3.8秒的启动过程中,能更好的限制电机的启动电流,抑制电机启动过程中电流的频繁波动,使电机的启动电流曲线更加的平滑。
4 结语
本文针对传统矿用高压潜水电机在启动过程中存在的过电流问题,提出了采用模糊自适应PID控制可变电抗器的高压电机软启动控制策略,分析了模糊自适应PID软启动系统组成以及其具体工作原理,给出了模糊自适应PID控制器设计步骤并在MATLAB中建立了具体的软启动仿真模型。
通过对高压异步电动机在传统限流软启动和模糊自适应PID限流软启动的仿真结果分析对比可知,引入模糊自适应PID控制策略的软启动相比于传统的软启动,能更好的限制电机的启动电流,减小对供电网络的冲击,同时优化电机的启动电流曲线。
【参考文献】
[1]袁佑新,王亚兰,彭万权,严进林,等.基于可变电抗的高压软启动器研究[J].电力自动化设备,2007,27(11):38-41.
[2]杨致泰,石翔,等.可变电抗式软启动器研究[J].山东理工大学学报(自然科学版),2012,26(5):84-87.
[3]张泾周,杨伟静,张安祥.模糊自适应PID制的研究及应用仿真[J].计算机仿真,2009,26(9):132-135.
[4]祝龙记,石晓艳.电气工程与自动化控制系统的MATLAB仿真[M].中国矿业大学出版社,2014,1.
[5]常雨芳,袁佑新,黄文聪,等.电力电子电抗器阻抗变化研究[J].武汉理工大学学 报,2011,10(33):127-130.
[责任编辑:杨玉洁]
