基于预测模型加扰动控制的最大功率点跟踪研究
2016-03-30刘洋毕朕斌栾鑫
刘洋 毕朕斌 栾鑫

【摘 要】分析了光伏发电系统最大功率点跟踪的基本工作原理,通过对现有控制方法的深入研究,设计了基于预测模型加扰动控制的最大功率点跟踪研究方法,仿真实验结果表明:基于预测模型加扰动控制的最大功率点跟踪研究方法不但能保证光伏阵列稳定准确的运行在最大功率点,而且跟踪速度明显提高,对于提高整个太阳能光伏发电系统的效率有非常重要的意义。
【关键词】光伏发电;最大功率点跟踪;预测模型;扰动控制
【Abstract】This paper analyzes the basic working principle of MPPT of photovoltaic power generation system, and designs the MPPT method based on predictive model and perturbation method. The simulation results show that the MPPT method based on prediction model and perturbation and observation methodc can not only ensure the stability and accuracy of PV array, but also improve the efficiency of the whole system.
【Key words】Photovoltaic power generation; MPPT; Forecasting model; Disturbance control
0 引言
光伏能源是可再生能源的一种,也是目前开发利用较多的一种可再生能源。光伏能源属于清洁能源,其具有无污染、可再生、分布广泛等特点,近年来被广泛认可并使用,就我们国家的情况而言,无论从现实需要,还是从未来的发展潜力考虑,太阳能都应是各种可再生能源中的首选。
1 传统的最大功率跟踪方法
1.1 恒定电压法
恒定电压法在太阳能电池温度变化不大时,太阳能电池的输出P—V 曲线上的最大功率点几乎分布于一条垂直直线的两侧。恒定电压法特点是:检测参数少、对硬件电路的要求低、实现比较容易,但是跟踪控制的效率差、仅适用于小功率发电设备中。
1.2 扰动观察法
扰动观察法[1]是通过对系统的输出电压、电流或PWM信号上叠加一个或正或负的扰动,在跟踪控制过程中,通过不间断地比较系统的输出功率值来判断所受的扰动是增强型的还是削弱型的,进而对控制PWM脉冲信号进行调节,实现最大功率跟踪控制。扰动观察法的特点是:实现起来比较容易,但是在最大功率点附近的波动现象会影响系统的输出。
1.3 电导增量法
电导增量法是根据光伏电池的输出特性中电压和功率的关系实现控制的。电导增量法的特点:实现起来比较容易,而且与扰动观察法相比,在最大功率点附近没有较大的波动现象,但在实践中对硬件的要求较高,最大功率跟踪控制调节的周期也会增加,影响了控制的时实性。
2 基于预测模型加扰动控制的最大功率点跟踪方法
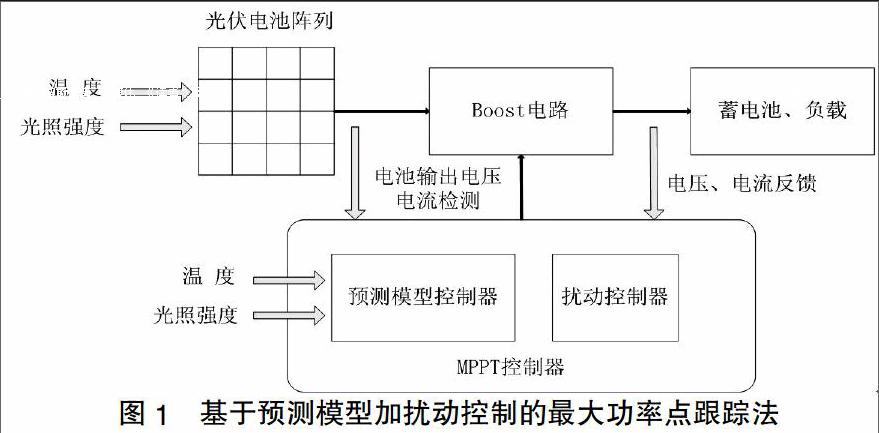
目前对太阳能光伏MPPT的研究主要是解决其中的两个问题[2],一是跟踪速度,二是系统的稳态性。基于以上两个问题,本文提出了基于预测模型加扰动控制的最大功率点跟踪方法。本方法相当于在原有太阳能光伏发电系统的MPPT控制器上添加一个调节器,改进后的MPPT控制器主要分为两部分,预测模型控制器是为了快速准确地找到最大功率点位置,扰动控制器是为了避免预测模型误差,使跟踪结果更精确。本项目提出的基于预测模型加扰动控制的最大功率点跟踪方法原理图如图1所示。
2.1 极限学习机理论
本项目釆用近年来发展起来的智能算法—神经网络极限学习机来训练预测模型控制器,极限学习机(ELM)是一种误差比较小的单隐层前馈神经网络训练算法,跟传统的基于梯度下降的学习算法相比极限学习机有很大的优势:ELM的计算速度非常快,他随机给定隐含层的连接权值,训练过程不需要迭代调整;传统的梯度下降算法,容易陷入局部极小,而ELM算法由于其求解输出权值最小二乘解的过程是一个凸优化问题,因此不会陷入局部最优,具有比传统算法更好的泛化性;ELM的参数选择简单,只需要选择合适的隐层结点便可获得良好的性能,而传统的基于梯度下降的算法如网络等,还需要选择合适的学习率,训练歩长等。
2.2 预测模型控制器的训练
本文设计的MPPT控制器中的模型控制器是为了快速准确的找到光伏阵列的最大功率点,因此把最大功率点作为预测模型控制器模型的输出,由于在环境温度和光照强度一定时,最大功率点的功率和电压是确定的,所以在模型中可以选择最大功率点的功率作为输出,也可以选择最大功率点的电压作为输出。
关于整个控制器里模型控制器的输入和输出变量已经确定,由于它们之间呈现出高度的非线性关系,利用传统的辨识方法很难辨识出这样一个两输入一输出的模型,本文釆用极限学习机来训练此模型控制器,并且其结构比较简单、误差较小,对整个太阳能光伏发电系统的跟踪速度和稳态性能都有很大作用。其结构如图2所示:
2.3 仿真实验
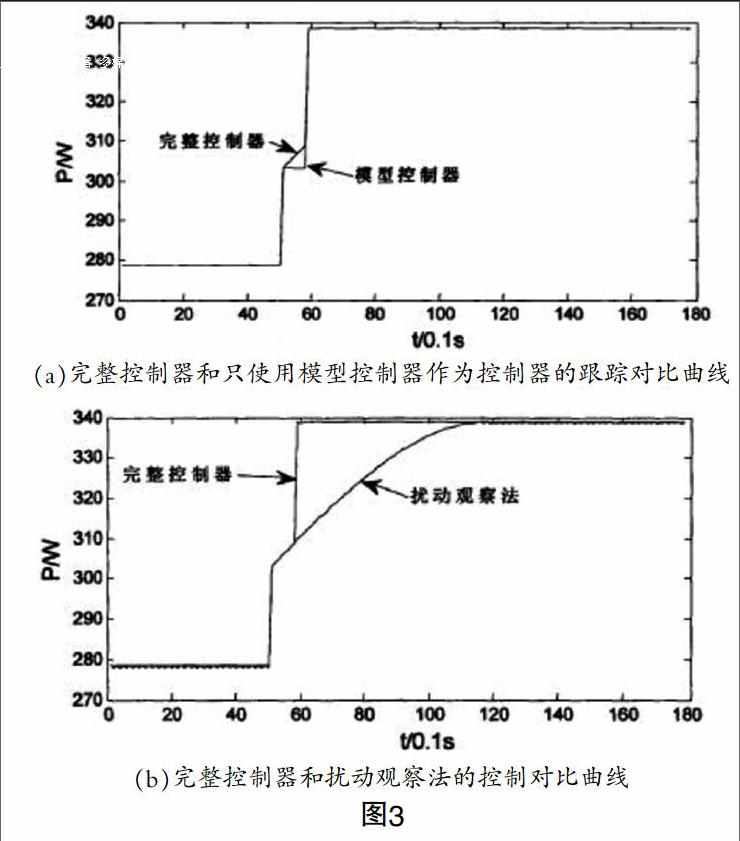
本文采取在反馈控制器上加入由极限学习机算法训练的模型控制器,由于扰动观察法的结构简单[3],运算速度较快,本文以扰动观察法作为反馈控制器的控制算法来进行下面的仿真实验。第一组实验:在5s以前的环境条件为:环境温度为15℃,光照强度为1kw/m2,在5s时环境条件变化为:环境温度为25℃,光照强度为1.2kw/m2。图3(a)为完整控制器和只使用模型控制器作为控制器的跟踪对比曲线,图3(b)完整控制器和扰动观察法的控制对比曲线:
(a)完整控制器和只使用模型控制器作为控制器的跟踪对比曲线
(b)完整控制器和扰动观察法的控制对比曲线
2.4 仿真结果
从图3可以看出,本文所设计的光伏控制器的跟踪性能特别好,在短暂的一秒内就能完成跟踪,并且稳定的运行在最大功率点,变化后的环境条件依然离训练数据比较近,其稳态误差几乎为零。
3 结语
本文在分析几种传统最大功率点跟踪方法的缺点后,提出了基于预测模型加扰动控制的最大功率点跟踪研究。仿真实验结果表明:最大功率点跟踪研究当环境条件变化时,基于预测模型加扰动控制的跟踪控制方法能够快速的跟踪新的最大功率点,并且保证在进入稳定状态后光伏阵列无震荡稳定工作在最大功率点,无论是跟踪速度和稳态性能都有很大提高,证实了这种控制方法的有效性。
【参考文献】
[1]徐锋.基于模糊控制和功率预测的变步长扰动观察法在光伏发电系统MPPT控制中的应用[J].计算机测量与控制,2014(02).
[2]方波,罗书克,康龙云.光伏占空比扰动控制MPPT及其仿真研究[J].可再生能源,2013(10).
[3]沈实叠,姚维.基于变步长的光伏系统MPPT算法研究[J].轻工机械,2013(05).
[4]朱铭炼,李臣松,陈新,龚春英.一种应用于光伏系统MPPT的变步长扰动观察法[J].电力电子技术,2010(01).
[责任编辑:杨玉洁]
