基于红外、紫外双波段探测的智能水炮系统设计
2016-03-27魏崇毓王馨民
魏崇毓,王馨民
基于红外、紫外双波段探测的智能水炮系统设计
魏崇毓,王馨民
(青岛科技大学 信息学院,山东 青岛 266100)
针对目前大空间传统智能水炮容易出现漏报虚报而造成不必要的损失的问题,研究出了一种基于红外、紫外双波段检测的智能水炮系统。本系统分为消防炮体与现场控制箱两部分,不仅实现了自动检测保护区域的功能,而且能够进行手动控制。采用高性能、低成本、低功耗的STM32f103作为控制芯片,热释电红外与紫外传感器共同构成火灾探测部分,大大提高了火源判断的准确性。另外,将CAN总线应用到智能水炮中,提高了水炮的响应速度与灵活性,通信距离增加到10km。该智能水炮系统实现了全时长、全方位且更加准确迅速地自动检测火源进行灭火的功能,为大空间和野外灭火提供了更好的选择。
双波段探测;热释电红外传感器;紫外传感器;智能水炮;STM32
0 引言
随着社会的发展进步,各种大空间建筑越来越多,如近年来建起来的各种大型体育馆、影视剧院、大型仓库等等,这些建筑大部分为公共场所,因此消防难度比较大,一旦发生重大火灾,造成的人员财产损失将特别大[1-2]。经过多年的研究,传统的自动喷水灭火系统已被广泛应用于写字楼、商场、超市中,取得了较快的发展,但是传统自动消防喷水灭火系统具有灭火及时性差,灭火效率低,灭火的针对性不强,灭火系统管路复杂等缺点[1],对大空间建筑物和大面积旷场的消防显得无能为力,因此,现有火焰检测及自动喷水灭火装置无法满足现代大空间自动消防喷水灭火系统的需要。
智能消防炮与传统的灭火装置相比具有实时性、有效性、可靠性、系统简单、安装方便以及节能等优势[3]。国内智能水炮的发展不是很理想,存在很多问题,而日本或者欧美的智能水炮虽然性能优越但价格高昂如日本的消防炮,每台折合人民币约100万元,整套系统可达上千万[1],因此开发性价比高的智能水炮系统对我国大空间火灾具有重大的意义。因此,设计了一种智能水炮控制系统,即实现了自动探测火灾定位后进行灭火的功能。智能水炮全天全时长监视保护区域,并自动定位着火区域,调整炮口对准着火区域灭火,将火灾消灭在萌芽中,避免了火灾造成的损失。
1 系统设计
本系统分为手动与自动灭火两部分。当人为发现火灾时,工作人员可利用现场控制箱进行手动控制,灭火结束后进行复位恢复自动控制,大大提高了系统的灵活性。现场控制箱功能包括控制炮体上下左右转动、启动电磁阀、启动水泵、控制箱自检以及手/自动切换、复位、紧急停止等功能。整个系统采用意法半导体(ST)公司出品的32位ARM处理器STM32f103作为主控芯片,采用国产专门用于明火探测的热释电红外传感器以及日本HAMAMATSU公司出产的紫外传感器R2868作为整个水炮的火焰探测部分来探测并定位着火点,采用步进电机作为水炮的动力部分来驱动炮体的上下左右运动,采用实时性较好的CAN(Controller Area Network)总线作为整个系统的信息传输,提高了信号的时效性,且可同时控制多台消防炮进行灭火。
从图1智能水炮系统结构看出,智能水炮系统可划分为以下3部分。
1)控制与通信部分
智能消防炮控制部分主要包括自动与手动部分。手动部分:现场工作人员在火灾现场通过对消防炮的控制进行实时灭火,大大节省了人力;自动部分:智能水炮对红紫外火灾探测信号的接收、处理,以及对电机的运动控制以及其他联动控制。采用STM32作为系统的CPU,采用CAN总线进行通信,基于CAN的现场总线,专门用于水炮、各类阀门的运动控制,以及与泵房和泡沫站的联动控制,其中包括消防炮的上下左右运动、阀门的开启关闭运动、泵的开启和停止运动等。
2)火焰探测部分
智能水炮的火焰探测部分主要完成发现火灾,定位着火点的功能。在火灾发生时火焰会辐射出红外及紫外线[3],红外波长主要集中在4.4mm[4],紫外波长在400nm以下。因此通过对特定波长辐射的电磁波进行采集测量,就可以探测到火灾。本文采用紫红外传感器作为探测元件,将火焰的热辐射特性与频率特性相结合,提高了火焰探测的准确度。
3)电机驱动部分
电机驱动是智能水炮的动力源,驱动炮体的转动来探测并定位火源,系统采用步进电机作为智能水炮的转动的驱动力,包括水平与垂直步进电机两部分,步进电机通过接受脉冲信号来转动一定角度,并采用细分驱动技术,提高了电机的灵敏度与分辨率。
2 硬件电路设计
如图2,硬件电路部分主要包括传感器模块、STM32控制模块及其外围电路、继电器模块、消防现场总线、电源模块以及现场控制器。传感器模块包括紫外传感器R2868与垂直水平热释电红外传感器来进行火焰的探测与定位,传感器将信号通过AD转换接口传给单片机STM32,单片机内核通过与存储器中火灾判定的阈值相比较来判定是否有火灾,若有火灾,通过继电器模块来驱动步进电机的运动来进行火灾定位,通过CAN接口将信号传至消防现场总线,来控制其他联动装置完成灭火过程,电源模块用来为各个模块供电,现场控制器,顾名思义通过人为进行灭火控制。
2.1 控制与通信
智能水炮采用32位基于ARM核心的带64K字节闪存的微控制器STM32f103作为主控芯片,其内核为CORTEX-M3,工作频率最高为72MHz,处理能力为1.25DMips/MHz,功耗为0.19mW/MHz STM32f103具有高性能、低成本、低功耗等优点[5],拥有2个12位模数转换器(1ms转换时间):模数转换器可直接处理红紫外模拟信号,有效减少了开发难度与工作量,多达80个快速I/O端口既可满足对电机的控制,又可作为CAN地址标识,以及9个通信接口:包括2个I2C接口,3个USART接口,2个SPI接口,CAN接口以及USB接口。多达3个USART接口,既可与现场控制箱进行通信[6],又可进行扩展(可与中控相连),CAN接口满足了智能水炮的通信基础,减少了开发难度。

图1 智能水炮系统结构
Fig.1 Intelligent water cannon system structure
普通消防炮大部分采用RS485作为通信协议,本系统采用CAN总线大大提高了总线利用率,降低了错误率。
从表1中我们可以看出,CAN在智能水炮上的应用降低了开发难度、系统成本及后期维护成本,以及通信失败率,并提高了传输效率。图3中STM32的CAN接口将控制信号以ttl的形式传递给CAN收发器TJA1050,TJA050将信号传递给现场总线,并控制其他联动装置,另外,现场总线的情况又通过TJA1050实时反馈给STM32,便于更好地控制。图4为TJA1050工作电路。这种通信方式为整个智能水炮系统的反应灵敏度与准确度提供了基础。
2.2 传感器部分
物质燃烧发出的光会表现为光谱、辐射、频率闪烁等物理特性[4]。即使与燃烧现场有一段距离,也可以检测到火焰的存在。火灾探测就是利用这一点来发现火灾。

图2 系统硬件结构
Fig.2 System hardware structure

表1 CAN与RS-485区别
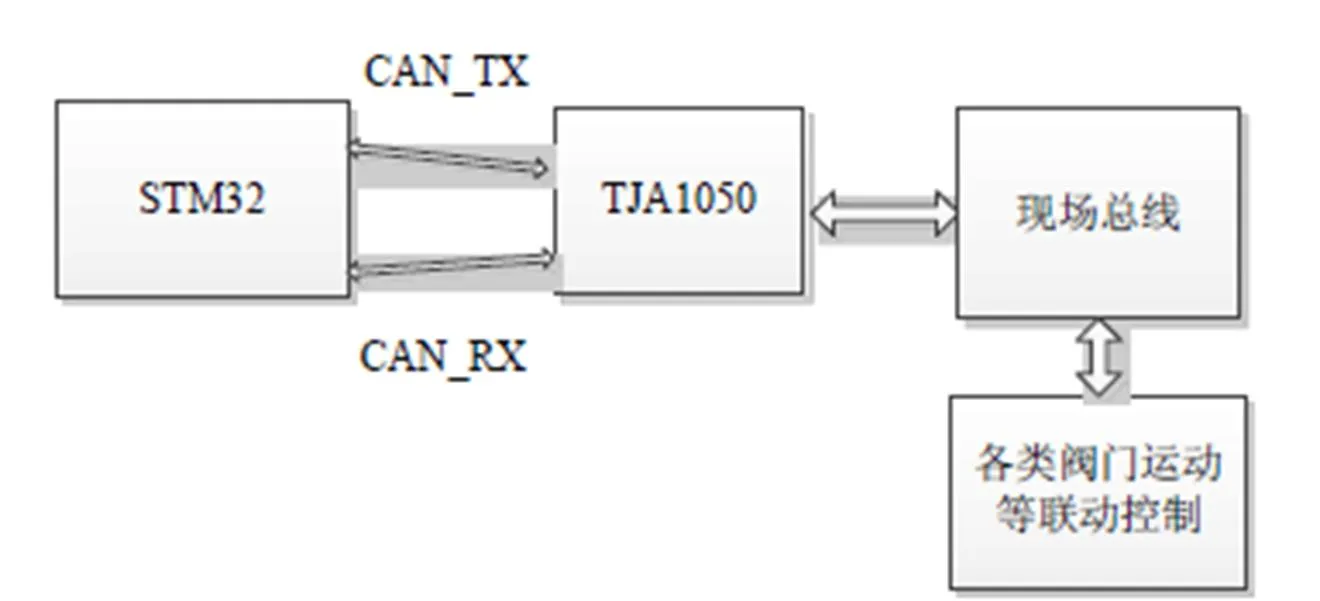
图3 CAN通讯流程
火灾探测可分为紫外、红外、以及红外、紫外复合探测3种[7],红外传感器又分为单红外、双波段、三波段以及多波段红外,相对来说双波段与三波段红外设计较为复杂,因此在实践中大部分应用单红外。红外探测易受一些温度高的物体、人、以及太阳光等的影响[5],而紫外传感器本身具有低噪声存在[2],但具有响应速度快而对高温、人不敏感的特点,智能水炮利用此特性通过检测光谱中的红外与紫外来判断火源,相对于普通智能水炮的单红外检测来说,抗干扰能力较强,并降低了误报虚报率,本系统将紫红外火灾探测应用于智能水炮中,大大提高了智能水炮的性能,降低了误操作率。
2.2.1 红外探测
系统采用热敏探测器钽酸锂热释电红外探测器,来测量火焰红外辐射温度。探测视角大于100°。红外探测器内部电路及测量电路如图5,图中黑体辐射通过窗口被灵敏元电容吸收,并产生电流,从而在g两端产生电压,并输出信号S,经运算放大器后输出o。
图6为图5中的运算放大电路,因为红外传探测器输出信号S较微弱,因此需要设计相应的前置运算放大电路。此运算放大电路通过四运算放大器MCP6004进行了两级放大,为电路板节省了空间,使探测器更为小巧轻便,电源模块为MCP6004以及热释电红外传感器提供5V直流工作电源,红外传感器D端与电源间串联了电阻2来降低射频干扰,G端接地[8],S端加负载电阻1,偏置电压约为1.7 V,传感器将输出信号s通过4直接耦合到MCP6004,构成带通滤波以及第一级放大电路的反向输入端,再由8与11耦合到二级反向放大电路进行滤波放大,8与11将信号隔直,13二极管反向接地对电路进行保护,最终输出out也就是o。

图4 TJA1050工作电路
Fig.4 Working circuit of TJA1050

图5 钽酸锂红外探测器内部电路及测量电路
图6中,第一级反向放大上限截止频率为:

下限截止频率为:
当输入信号频率为1Hz时,第一级放大增益:

第二级放大增益为:

计算得带宽为15.94Hz,放大增益约为69.5dB,实验结果如图7,据如图示波器显示当红外信号时如图中(a)、(b)、(c),当无红外信号时,输出电压为0,当检测到明火时,输出电压迅速升到3~5V,经测验,人体及太阳光造成的干扰低于3V,因此,红外传感器能较好的测试到火源,经测验探测距离大于30m,且响应时间为1s。
2.2.2 紫外探测
系统紫外传感器采用滨松R2868 UVTRON紫外线开/关探测器,R2868利用光电效应和气体倍增效果的原理,测量的有效波长为185~260nm[7],对可见光不敏感[9-10],与半导体探测器不同,它不需要光学过滤器[1],从而使它非常容易使用。R2868具有宽角灵敏度高,能够可靠、快速发现紫外辐射等优势[11-13]。R2868火焰传感器发现火焰时,就会向外输出形如锯齿的模拟电压,但是单片机无法直接对锯齿波做出判断,因此R2868采集的数据还需要经过信号处理器和A/D模数转换器的进一步处理。
R2868工作电路如图8,当充气的紫外火焰传感器UV1(R2868)阴极吸收紫外辐射后,阴极吸收紫外辐射后,阴极上光电子飞向阳极,在飞向阳极的过程中,光电子与气体中的原子发生碰撞使气体电离形成雪崩放电[9]。

图6 运算放大电路
Fig.6 Operational amplifier circuit
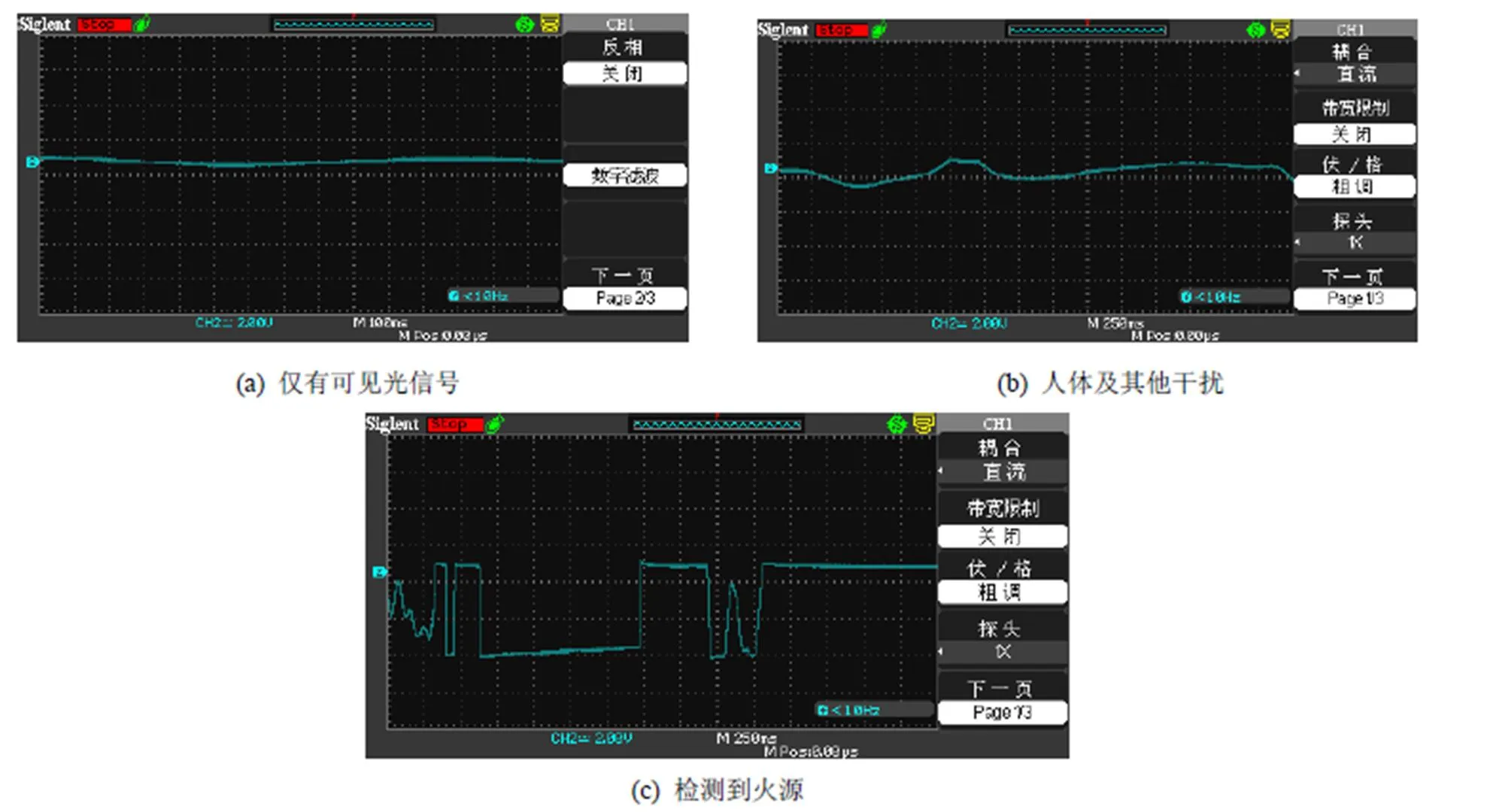
图7 红外输出信号测试
Fig.7 Output signal test of infrared sensor
紫外火焰传感器产生雪崩放电后,电阻变小,1中的能量在回路迅速释放,P与地间产生电压。当电容1两端电压下降到传感器初始敏感直流电压280V以下时,传感器内光电子停止放电,传感器随之断开。断开后,300~350V的直流电源又对电容1充电。当电容1两端电压达到R2868工作电压后,阴极逸出的电子在外电路下又形成电流,使紫外火焰传感器内部阻值变小。传感器每导通一次输出一个脉冲,且输出脉冲频率取决于紫外辐射的强度、电容1、电阻2和3的大小。当1、2以及3一定时,紫外辐射越强,P端频率越高。经过对脉冲的整形送入STM32中,并计数,当脉冲频率强度大于STM32中的阈值限定时,判断紫外传感器探测到火焰。
2.3 电机驱动部分
智能水炮系统将步进电机(电机控制流程如图9所示)作为系统动力部分,步进电机通过输入端信号的脉冲量与频率实现对角度和速度的控制[14],且步进电机为开环控制,因此不需要反馈信号,完全满足智能水炮功能的要求,且性价比较高智能水炮在驱动电机转动时设置了限位,当炮体转至限位时反转,这样避免了步进电机在长时间同方向运转时被烧坏的危险。水炮水平旋转范围可达360°无死角,垂直旋转范围仰角为30°,俯角为90°。单片机将信号通过继电器输出脉冲信号,来控制电机转动固定的角度,从而实现了准确调速并定位火源。
3 软件设计实现
系统初始化完毕后,如图10,紫外探测器24h不断检测现场是否发生火灾,一旦发现火源将信号传给STM32f103,STM32f103将接收到的信号与存储于STM32f103内部EEPROM中的火焰阈值进行比较(存储器中存有5个安全级别,可视大空间的现场情况来设定),若判定为火源,STM32将驱动炮体水平转动探测火源,红外探测器开始探测并不断将采集信号发送给单片机进行火灾判定,当到达扫描时间时还未发现火灾,则进行复位,当红外探测器探测到火源时,炮体转动到水平红外探测信号最强点,单片机控制炮体进行垂直转动,调整水炮角度到垂直红外探测器信号最强点[15],根据一定的角度补偿算法启泵开阀灭火。并将现场是否有火灾信号、以及水压流量数据反馈给控制系统,系统分析后进行自动定位补偿调整,当现场火灾信号消失后,系统进行自动复位。若工作人员发现火灾,则可直接通过现场控制箱来控制炮体转动以及其他联动装置进行灭火,完成后进行复位,智能水炮恢复自动检测下一次火灾。
4 结论
本系统智能水炮具有全自动、全方位、检测及防护范围广的特点,红外与紫外的反应时间约为1s,智能水炮的反应时长不超过25s,探测距离大于30m,系统将红紫外双波段探测应用到智能水炮中,有效降低了水炮的误动作率,减少了不必要的损失,并将CAN应用于水炮通信中,传输距离与效率大大提高,为远程控制水炮提供了基础。整套设备在国内较为先进,较国外设备来讲价格低廉,并可以满足国内大空间火灾的要求,且系统简单,安装方便,有很好的应用市场。

图8 R2868工作电路

图9 电机控制
Fig.9 Motor control

图10 软件流程图
[1] 庄坤森. 大空间火焰检测与自动消防炮系统研究[D]. 福州: 福州大学, 2010.
ZUANG Kunsen.Research on Large Space Fire Detection and Automatic Fire-fighting Cannon System[D]. Fuzhou:Fuzhou University, 2010
[2] 李文斌, 张卓, 范赐恩, 等. 基于紫红外传感器的火焰探测系统设计与实现[J]. 仪表技术与传感器, 2015(3): 56-59.
LI Wenbin, ZHANG Zhuo, FAN Cien,Design and implementation of flame detection system based on ultraviolet sensor and infrared sensor[J]., 2015(3): 56-59.
[3] 陈娟. 基于多特征融合的视频火焰探测方法研究[D]. 合肥: 中国科学技术大学, 2009.
CHEN Juan. Study on method of multi-feature fusion based video flame detection[D].Hefei:University of Science and Technology of China, 2009.
[4] 蔡鑫, 赵敏, 李然, 邓军军. 基于热释电红外传感器的火灾探测系统设计[J]. 红外技术, 2007, 29(12): 697- 700.
CAI Xin, ZHAO Min, LI Ran,et al.Design of a fire detection system based on pyroelectric infrared sensor[J]., 2007, 29(12) : 697-700.
[5] 陈学军, 杨永明. 基于双核的视频智能消防水炮设计[J]. 计算机测量与控制. 2015(12): 4184-4186.
CHEN Xuejun, YANG Yongming. Design of intelligent fire water cannon based on dual-core [J]., 2015(12): 4184-4186.
[6] 华海洁, 陈海龙, 黄晓兰. 某展厅智能型水炮系统的设计探讨[J]. 甘肃科技, 2010(9): 128-131.
HUA Haijie, CHEN Hailong, HUANG Xiaolan.The design of intelligent water gun system in an exhibition hall[J]., 2010(9): 128-131.
[7] 喻兴隆. 智能消防炮控制系统设计[D]. 成都: 西华大学, 2011.
YU Xinglong. The Control System Design of Intelligent Fire Monitor[D]. Chendu:Xihua University, 2011.
[8] 魏丽君, 唐冬梅, 肖辽亮. 基于热释电红外传感器微弱信号处理电路的设计与分析[J].仪表技术与传感器, 2013(7) : 89-91.
WEI Lijun, TANG Dongmei, XIAO Liaoliang. Design and analysis of weak signal processing circuit based on pyroelectric infrared sensor[J]., 2013(7) : 89-91.
[9] 夏焕雄, 孙树文, 姚益武, 等. 多传感器器概率综合的火灾报警器计与实现[J]. 计算机测量与控制, 2011, 19(2): 370-372.
XIA Huanxiong, SUN Shuwen, YAO Yiwu, et al. Design and realization of fire alarm by determining probability based on multi-sensor integrated[J]., 2011, 19(2): 370-372.
[10] 陈章其. 用于火焰探测的紫外光敏[J]. 传感技术学报, 1996(1): 55-56.
CHEN Zhangqi. Ultraviolet light sensitive for flame detection[J]., 1996(1): 55-56.
[11] 刘云翔, 陈艳, 原鑫鑫. 火灾救援系统中动态定位方法研究[J]. 计算机测量与控制, 2012, 20(1): 202-208.
LIU Yunxiang, CHEN Yan, YUAN Xinxin. Dynamic localization research for the fire rescue system[J]., 2012, 20(1): 202-208.
[12] 张红兰, 李扬. 基于多传感器的智能火灾报警器的设计[J]. 仪器仪表学报, 2009, 16(4): 44-47.
ZHANG honglan, LI Yang. Design of intellective fire alarm based on multi-sensor[J]., 2009, 16(4): 44-47.
[13] 张石锐, 郑文刚, 黄丹枫. 微弱信号检测的前置放大电路设计[J]. 微计算机信息, 2009(8): 188, 222-224.
ZHANG Shirui, ZHENG Wengang, HUANG Danfeng. The design of preamplifier circuit based on weak signal detection[J]., 2009(8): 188, 222-224.
[14] 宋建江. 小型智能消防水炮的研究[J]. 低碳世界, 2015(22): 269-270.
SONG Jianjiang. Study on small intelligent fire water cannon[J]., 2015(22): 269-270.
[15] 胡幸江. 多波段红外火焰探测器系统研究和产品开发[D]. 杭州: 浙江大学, 2013.
HU Xingjiang. Research and Product Development of MIR Flame Detector System[D]. Hangzhou: Zhejiang University, 2013.
Design of Intelligent Water Cannon System Based on PIRS and UV Detection
WEI Chongyu,WANG Xinmin
(,266100,)
In this paper, a kind of intelligent water cannon system based on infrared and ultraviolet dual wave detection is proposed, to avoid unnecessary loss from the false alarm and failure alarm. This system is divided into automatic control and manual control to adapt to the situation, and it adopts STM32F103 as the main control chip which has the advantage of high performance, low cost and low power consumption and PIRS infrared sensor and ultraviolet sensor as the part of fire detection. Furthermore, as the communication bus, CAN has greatly improved the reaction speed and flexibility of water cannon, and the communication distance increased to 10km so that the intelligent water cannon can detect the fire more quickly and accurately at a full time, and in all aspects, providing a better choice for large space and outdoor fire.
dual wave detection,pyroelectric infrared sensor,UV sensor,intelligent water cannon,STM32
TN215,TN23
A
1001-8891(2016)10-0877-07
2016-04-29;
2016-05-06.
魏崇毓(1957-),教授/博士,主要研究方向为通信与电子系统,E-mail:weichongyu@sina.com。
