基于自适应SUSAN各向异性扩散的红外弱小目标检测
2016-03-27苑智玮黄树彩唐意东熊志刚
苑智玮,黄树彩,唐意东,熊志刚
基于自适应SUSAN各向异性扩散的红外弱小目标检测
苑智玮,黄树彩,唐意东,熊志刚
(空军工程大学 防空反导学院,陕西 西安 710051)
针对复杂背景下红外弱小目标提取困难的问题,提出了一种自适应SUSAN各向异性扩散的红外弱小目标检测算法。该算法结合SUSAN边缘检测算子与各向异性扩散,形成新的扩散方程对红外图像进行背景预测,与原图像差分后实现弱小目标检测。为使算法具备自适应能力,提出SUSAN边缘检测器灰度差阈值的自适应设定方法,采用绝对偏差中值算子作为其扩散系数。实验结果表明,该算法能够有效滤除复杂图像背景,大幅提升信噪比,同时保留目标大小。
SUSAN边缘检测;各向异性扩散;小目标检测;背景预测;红外图像
0 引言
受红外图像成像机理以及当前红外探测器技术水平的限制,红外图像与可见光图像相比,往往呈现噪声多、边缘模糊、信噪比低等特点,在含有弱小目标的红外图像中表现得更为明显。由于探测系统距离目标位置较远,背景环境复杂,目标呈现的像素点数常常与噪声无异,这无疑为红外预警系统实现精确探测与跟踪带来极大挑战[1]。
当前,学者们针对单帧红外弱小目标检测提出了诸多算法,大致可分为两类,一类算法是基于机器学习的检测方法,它将目标检测视作目标与背景的二分类问题,利用已有的目标与背景的先验知识训练目标与背景的分类器,然后对原有图像处理实现二者的分类判别,典型的有:基于神经网络[2],PCA[3],SVM[4]等方式,由于算法完成训练需要大量先验知识,该类检测手段的应用常常受到限制。另一类最为常见的是滤波算法,这类算法采用背景建模、原图差分、阈值分割等处理方法,可在一定程度上实现背景抑制和目标提取,如:中值滤波[5]、高通滤波[6]、TDLMS[7]、Top-hat[8]等,但是这些方法缺乏方向性信息,属各向同性滤波,滤波后图像的背景边缘不能被很好地抑制,常出现大量边缘残留,虚警率较高。张强[9]等人通过改进常用的PM各向异性扩散模型,一定上实现了红外图像的背景抑制。在图像去噪领域的SUSAN(smallest univalue segment assimilating nucleus)边缘检测算子[10]具有图像角点和边缘敏感、对噪声不敏感的特性,其在红外弱小目标检测中也得到了运用。此外,Yu有效结合了SUSAN边缘检测算子与各向异性扩散(anisotropic diffusion),提出了SUSAN_AD模型[11],对医学领域中超声图像的斑点噪声抑制能力较好,但是该模型参数设置较多,个别阈值的设定需多次尝试,应用受限。本文将该模型引入到弱小目标检测,并根据红外图像背景预测的需要做出必要改进,同时设定自适应选取灰度差阈值的方法,最终利用该模型取得了良好的检测效果。
1 现有检测算子和模型
1.1 SUSAN边缘检测算子




式中:max为SUSAN的最大尺寸。SUSAN边缘检测算子可以不依赖于邻域差分或者最大梯度进行边缘检测,且检测精度不受模板尺寸的影响,因此噪声对于边缘检测的影响可以被充分抑制,使其可以有效地区分噪声和边缘。
1.2 PM模型
1990年,Perona和Malik提出各向异性扩散的PM模型[12],表达式如下:

式中:div为散度算子;Ñ为梯度算子;||||表示幅度;(||Ñ||)为扩散方程,其中为时间,整个模型将图像灰度的变化描述为与扩散时间相关。
依据||Ñ||的大小有选择性地对图像进行扩散,完成对图像中边缘区域和非边缘区域不同强度的扩散。为使PM扩散模型成功实现背景预测,其应该满足:梯度值较大的目标区域扩散被加强,梯度值较小的背景区域扩散被抑制。这一条件可通过设定扩散系数来实现,但是这与用于图像去噪领域的PM模型中的扩散系数相反,需要对其进行如下修改[9]:
式中:||Ñ||视为目标检测器。当||Ñ||<<时,(||Ñ||)®0,抑制图像扩散程度,保留背景信息;当||Ñ||>>k时,(||Ñ||)®1,加强图像平滑程度,滤除目标信息。从而实现图像背景的有效预测。
2 自适应SUSAN各向异性扩散算法
在红外图像中目标灰度往往表现为局部极大值,且在局部范围内表现出与背景的不相关性[9]。而当红外预警探测器获取的红外图像信噪比较低时,目标梯度的数值较小,甚至小于背景边缘梯度,仅仅依靠||Ñ||区分目标和背景边缘的PM模型难以实现弱小目标检测。Yu在2010提出将SUSAN边缘检测算法与各向异性扩散结合起来的SUSAN_AD模型[10],应用此模型可以有效解决上述问题。该模型的扩散方程为:
(7)
式中:SUSAN(())为图像边缘响应;()为方差为的高斯函数;为扩散门限;*为卷积。
在弱小目标的检测中,扩散模型需要对目标和背景进行不同程度的平滑,依据梯度大小有选择性地对图像边缘区域和非边缘区域进行不同强度的扩散。为将SUSAN_AD扩散模型成功运用到红外弱小目标检测中,使其满足:梯度值较大的目标区域扩散被加强,梯度值较小的背景区域扩散被抑制,实现背景预测,需要对扩散系数做出必要的修改。可通过设定扩散系数来满足这一条件,但是这与用于图像去噪领域的SUSAN_AD模型中的扩散系数相反:为此,对图像降噪领域的SUSAN_AD模型的扩散方程进行如下修改:
(8)
其中,扩散门限由鲁棒统计学[13]自动估计得到,即扩散门限等于当前像素点邻域内梯度的绝对偏差中值(median absolute deviation,MAD):
(9)
这样,图像经过SUSAN边缘检测后,可由式(2)获得边缘响应。对其中边缘响应大于0的目标区域加强扩散,使目标充分平滑;对边缘响应为0的背景区域抑制扩散,使背景得以充分保留。
则新模型的偏微分方程为:

式中:0为原图像,通过若干次非线性迭代求解式(10)的离散形式,即可得到去噪后的图像。
由于SUSAN边缘检测算子本身并不能自适应确定灰度阈值,为提高SUSAN各向异性扩散算法的自适应能力,使其能够适应不同复杂背景的红外图像,提出了一种快速、有效的灰度差阈值的自适应设定方法。的取值决定了图像中的最小边缘对比度的大小,值过小,会将边缘误判为目标,造成大量虚警;值过大,不能有效分辨出潜在目标,影响检测能力,值相当于是红外图像中目标与背景的分界线,故可由图像目标位置梯度与边缘位置处梯度的均值表示,按如下步骤进行设定:
①采用Otsu算子[14]获取图像边缘点;
②计算边缘位置梯度,求其均值1;
③计算图像的最大梯度2;
④求1和2的均值即为灰度差阈值。
本文采用窗口大小为×的滤波模板进行SUSAN各向异性扩散算法图像滤波,假设原始图像某像素点为(,),该点的四向邻域灰度差值为D、D、DD,其中D=(,)-(-,),D=(,)-(+,),D=(,)-(,-),D=(,)-(,+),=(-1)/2,为奇数。由此便可计算模型滤波后的图像(,)为:
(,)=(,)-[(D+D+D+
D)(SUSAN(*))]/4 (11)
由式(11)可知,滤波窗口的大小影响着各像素点四邻域灰度差值,所以会在一定程度上影响检测性能,选取的滤波窗口过大会造成一定的虚警,过小则很难完整地保留目标,所以滤波窗口的选取应根据图像中目标大小合理设定。
此外,影响算法性能的另一重要因素为扩散次数,扩散次数每增加一次,算法就会重复一次滤波过程,使算法复杂度和运算时间增加。由于本文提出的自适应SUSAN各向异性扩散模型中引入了自适应的灰度差阈值设定方法和鲁棒统计学估计的扩散门限,使得新模型经一次扩散滤波后的效果已经十分明显,完全可以有效检测出目标,故综合运算复杂度的考虑,本文算法的扩散次数设定为一次。
3 算法的计算流程
由上章分析,基于自适应SUSAN各向异性扩散的红外弱小目标检测算法的计算流程可总结为:图像输入,滤波进行背景预测,与原图像差分。利用Otsu算子获得边缘位置处梯度,计算图像中的数值最大的梯度,二者取平均得到自适应灰度差阈值,采用已设定好的SUSAN算子对原图像与高斯函数卷积后的结果进行边缘检测,将边缘响应继续输入至各向异性扩散模型进行背景预测,其中扩散门限由绝对偏差中值(MAD)设定,最后将完成了图像的背景预测结果与原图差分,从残差图像中获取目标。
综上所述,本文提出的自适应SUSAN各向异性扩散算法的流程图,如图1。

图1 提出的算法流程
4 实验结果及分析
为综合分析本文提出算法的检测能力,采用信噪比(SNR)、信杂比(SCR)、背景抑制因子(BSF)以及接收机工作特性(ROC)曲线下方面积(Area Under the Curve, AUC)[15]等4种评价指标对检测算法的性能进行评价。前3个指标的表达式为:
(12)
式中:t为目标灰度均值;b为背景灰度均值;b为背景灰度标准差;in、out为滤波前后图像背景的标准差。信噪比和信杂比描述了图像中目标信息相对背景信息的增强程度,说明了弱小目标在检测前后图像中的改善情况。接收机工作特性(ROC)曲线描述了检测概率与虚警概率之间相互制约的关系,利用曲线下方的面积能够有效评价模型性能。综合这4个指标,尽可能客观地描述算法的检测能力,4个指标的数值越大,目标相对背景越明显,越有利于提取目标。
实验选取了背景特征、目标特性各异的红外图像,从而验证自适应SUSAN各向异性扩散模型能够在不同背景环境中均能表现出良好的检测能力。选取的图像大小为256×200,共有A、B、C三个红外图像序列,其中A、B为真实的红外图像序列,目标大小分别为4个像素和25个像素,C是人工合成的图像序列,背景复杂,起伏程度较大,目标采用模拟高斯分布点目标的方式进行添加,规定其作匀速直线运动。实验中选取的对比检测算法均采用5×5滤波窗口,分别为:Top-hat滤波、最大中值(Max-median)滤波和PM模型算法,其中PM模型扩散系数采用本文绝对偏差中值算子的方法进行设定。
从3个序列图像的实验结果中各选取了有代表性的一帧图像,如图2所示,A1、B1、C1分别为3个序列中的原图,A2、B2、C2为Top-hat滤波后的图像,A3、B3、C3为Max-median滤波后的图像,A4、B4、C4为PM滤波后的图像,A5、B5、C5为本文提出的SUSAN_AD滤波后的图像。从检测结果可以看出,基于自适应SUSAN各向异性扩散算法在不同复杂背景以及不同目标大小的情况下均能准确检测出目标,同时较好地抑制了背景;PM滤波算法仅次于本文提出算法,但背景抑制能力稍显不足,尤其是在C图像序列上,检测后图像依旧残余了较多的高频边缘点;Max-median滤波后图像主要存在的问题是不能准确保留目标大小,在B图像序列上表现得较为明显,原本25个像素点的目标检测后只剩下8个像素;Top-hat滤波虽能保留目标,但目标大小并不准确,出现了目标外围单像素拓宽现象,且背景抑制效果在4个对比算法中最差。
图3为A、B、C图像序列的ROC曲线图,3个图像序列的具体评价指标值如表1所示,对比各个算法SNR、SCR、BSF、AUC可以发现,自适应SUSAN各向异性扩散算法均具有良好的表现。在背景复杂程度最大的C图像序列中,本文算法滤波后的图像仍然存在部分边缘点,但在背景复杂程度适中的A以及背景光滑的B图像序列,SUSAN_AD算法的背景滤除效果显著,有利于提取目标。
5 结束语
本文提出的自适应SUSAN各向异性扩散算法,融合了SUSAN边缘检测算子不受噪声影响和各向异性扩散有效抑制背景边缘的优点,加入运算简单的自适应灰度差阈值设定方法,使其能够适应不同复杂程度的红外图像。自适应SUSAN各向异性扩散算法合理运用了SUSAN边缘检测算子,其算法性能相比于PM模型算法有大幅的增强。从检测结果图像以及ROC曲线来看,相较于其他几种算法,自适应SUSAN各向异性扩散算法降噪效果显著,更能准确地区分目标与复杂背景,有效抑制背景边缘,降低虚警率,具备良好的自适应能力,在下一步在多帧图像中准确提取目标发挥重要作用。

图2 目标检测算法结果
Fig. 2 Target detection results of the algorithms
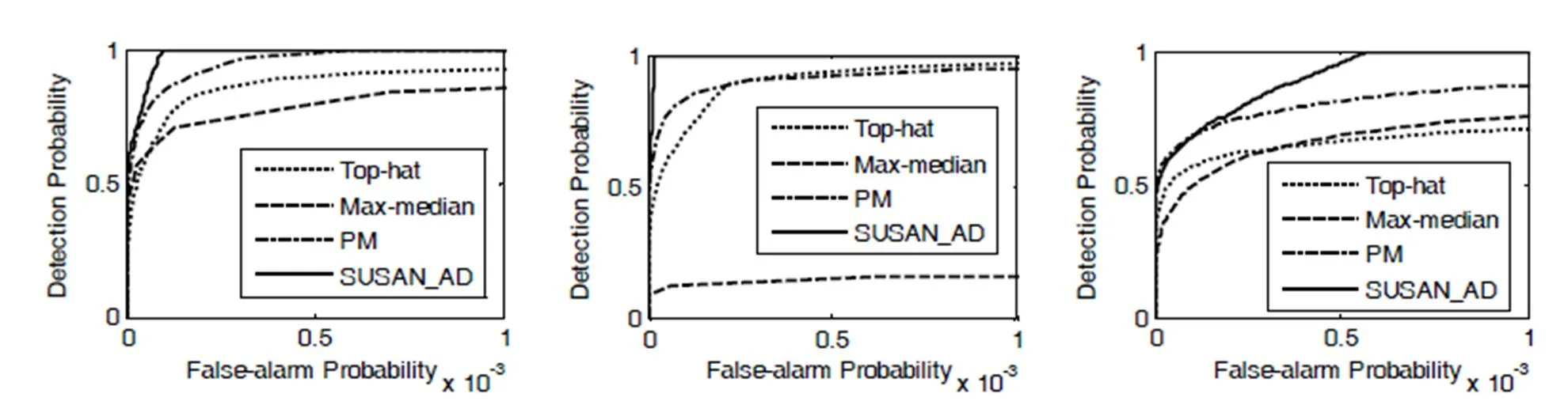
图3 三组图像序列ROC曲线

表1 评价指标值
[1] HAN J H, MA Y, ZHOU B, et al. A robust infrared small target detection algorithm based on human visual system[J]., 2014, 11(12): 2168-2172.
[2] ZHANG Peng, LI Jianxun. Neural-network-based single-frame detection of dim spot target in infrared images[J]., 2007, 46(7): 076401.
[3] CAO Y, LIU R M, YANG J. Infrared small targets detection using PPCA[J]., 2008, 29(4): 385-395.
[4] WANG P, TAIN J W, GAO C Q. Infrared small target detection using directional high pass filters based on LS-SVM[J]., 2009, 45(3): 156-158.
[5] 卢瑞涛, 黄新生, 徐婉莹.基于Contourlet变换和Facet模型的红外小目标检测方法[J]. 红外与激光工程, 2013, 42(8):2281-2287.
LU Rui-tao, HUANG Xin-sheng, XU Wan-ying. Method of infrared small target detection based on Contourlet transform and facet model[J].2013, 42(8):2281-2287.
[6] YANG L, YANG J, YANG K. Adaptive detection for infrared small target under sea-sky complex background[J]., 2004, 40(17): 1083-1085.
[7] CAO Y, LIU R M, YANG J. Small target detection using two-dimensional least mean square (TDLMS) filter based on neighborhood analysis[J]., 2008, 29(2): 188-200.
[8] LI J C, SHEN Z K, LAN T. Detection of spot target in infrared clutter with morphological filter[J]., 1996, 1(1): 168-172.
[9] 张强, 蔡敬菊, 张启衡. 各向异性的红外背景预测方法[J]. 强激光与粒子束, 2012, 24(2): 301-306.
ZHANG Qiang, CAI Jing-ju, ZHANG Qi-heng. Anisotropic infrared background prediction method[J]., 2012, 24(2): 301-306.
[10] SMITH S M, BRADY J M. SUSAN——a new approach to low level image processing[J]., 1997, 23(1): 45-78.
[11] YU J, TAN J, WANG Y. Ultrasound speckle reduction by a SUSAN-controlled anisotropic diffusion method[J].2010, 43: 3803-3092.
[12] PERONA P, MALIK J. Scale space and edge detection using anisotropic diffusion[J]., 1990, 12(7): 629-639.
[13] ROUSSEEUW P J, LEROY A M.[M]. New York: Wiley, 1987.
[14] 梁金明, 魏正曦. Ostu算法的改进研究[J]. 四川理工学院学报: 自然科学版, 2010, 23(5): 543-545.
LIANG Jin-ming, WEI Zheng-xi. Research on improvement of the ostu algorithm[J].: Natural Science Edition , 2010, 23(5): 543-545.
[15] 李凡. 复杂背景抑制及弱小目标检测算法研究[D]. 西安: 西安电子科技大学, 2010.
LI Fan. A Study of Algorithms for Complex Background Suppression and Small Target Detection[D]. Xi’an: Xidian University, 2010.
Infrared Small Target Detection Based on Adaptive SUSAN-controlled Anisotropic Diffusion
YUAN Zhiwei,HUANG Shucai,TANG Yidong,XIONG Zhigang
(,,710051,)
To solve the difficult problem of acquiring the small target from infrared image, a new algorithm based on adaptive SUSAN-controlled Anisotropic Diffusion is proposed. The new algorithm combines the SUSAN edges detection algorithm and anisotropic diffusion so that a new diffusion equation is formed, which is used for predicting the background of the infrared image. After that the small targets are extracted from the residual picture between the original image and background image. To make an improvement of the adaptive ability of the new algorithm, a new way to set the limen of the SUSAN edge detector is proposed, and the median absolute deviation is used as the diffusion coefficients. The experiment demonstrates that the proposed algorithm is able to suppress the background of the image effectively, improve the SNR obviously and preserve the size of target accurately.
SUSAN edge detection,anisotropic diffusion,small target detection,background prediction,infrared image
TP391
A
1001-8891(2016)10-0850-05
2016-03-04;
2016-03-18.
苑智玮(1993-),男,内蒙古通辽人,硕士研究生,主要从事红外弱小目标检测与识别研究。E-mail:YuanzhiweiSachiel@163.com。
陕西省自然科学基础研究计划资助项目(2012JM8020);航空科学基金(20130196004)
