一种基于TYPE-Ⅱ跟踪型RDC算法的电路设计
2016-03-24刘太广包生辉强小燕
刘太广,包生辉,苗 韵,强小燕
(中国电子科技集团公司第58研究所,江苏 无锡 214035)
一种基于TYPE-Ⅱ跟踪型RDC算法的电路设计
刘太广,包生辉,苗 韵,强小燕
(中国电子科技集团公司第58研究所,江苏 无锡 214035)
摘 要:为提高电机控制DSP电路集成规模,将旋变数字转换电路进行IP化,提供电机轴位置反馈信息,对电机控制算法中Type-Ⅱ型跟踪环路的算法进行深入分析,并论证Type-Ⅱ型跟踪环路计算位置和速度的原理、实现旋变数字转换(RDC)工作的过程。针对分析的算法提出可IP化的RDC模块结构,使用精确查表结构实现正余弦信号转换、利用乘法器与滤波器组合达到解调效果。在实验室使用硬件描述语言实现电路并验证电路功能,使此算法更加具体清晰,在DSP电路集成中具有一定优势。
关键词:Type-Ⅱ;RDC;跟踪环路
1 引言
旋变数字转换器(RDC)广泛用于汽车和工业应用中,用来提供电机轴位置/速度反馈信息。在全数字永磁同步电动机工业控制系统中,当使用自整角机或者旋转变压器作为位置及速度检测单元时,由于所得到的输出信号是三相或者两相的含位置信息的模拟正弦角度信号,又需要外加励磁信号(称为参考信号),故必须进行处理将其输出的模拟位置信息转换为数字信号后,才可输入到DSP中来完成对电机转矩、速度及位置的高精度控制。这就需要设计一个相应的信号转换电路,旋变数字转换器RDC电路。本文对Type-Ⅱ跟踪环路实现的RDC算法进行解析,并使用仿真工具完成RDC算法的ASIC验证,透视速度与位置的跟踪过程,将ASIC验证成果集成在SoC系统中,在旋变器和系统微处理器之间实现接口,当正弦信号激励旋变器的初级绕组时,会在次级绕组上产生两路电磁感应差分输出信号(正弦信号和余弦信号),旋变器采用这两路感应差分信号解码电机轴的角位置和旋转速度,提供给处理器进行下一步工作。
2 Type-Ⅱ跟踪环路原理
目前大部分单芯片RDC使用Type-Ⅱ跟踪环路计算位置和速度。Type-Ⅱ型跟踪环路采用二阶滤波器,确保静止或恒定速度输入信号的稳态误差为零。RDC对两路输入信号进行同步采样,为跟踪环路提供数字化数据。跟踪型RDC转换器由正余弦乘法器、误差放大器、相敏解调器、积分器等组成,具有抗干扰能力强、实时性强等特点。图1显示了Type-Ⅱ型跟踪环路的主要原理。
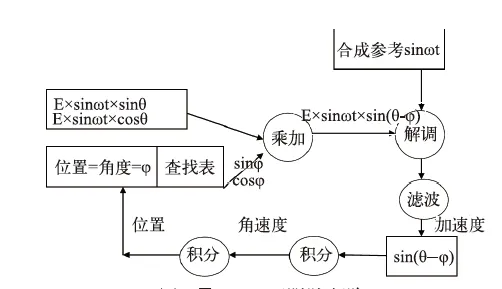
图1 Type-Ⅱ型跟踪环路
RDC与旋转传感器配合使用,以便检测电机轴的位置和转速。在这种应用中,旋变器利用正弦波参考信号进行激励。初级绕组上的旋变器激励参考信号被转换为两个正弦差分输出信号:正弦和余弦。正弦和余弦信号的幅度取决于实际的旋变器位置、旋变器转换比和激励信号幅度。
RDC同步采样两个输入信号,以便向数字引擎(即所谓Type-Ⅱ跟踪环路)提供数字化数据,Type-Ⅱ跟踪环路负责计算位置和速度。基本的旋转变压器分经典旋变和可变磁阻式旋变等,它们在结构和绕组分配方式上略有不同,但是无论何种形式的旋变,其旋变输出电压(S3-S1, S2-S4) 的计算公式均相同,即:

式中,θ为转子转角,sinωt为转子激励频率,E为转子激励幅度。
转换器跟踪轴角θ的原理为:转换器将产生反馈角φ,反馈角φ与输入角θ相比较,当转换器正确跟踪输入角度时,二者之间的误差将为0。为了测量误差,将S3-S1乘以cosφ,将S2-S4乘以sinφ,可得到:


将式(3) 、式(4) 差值化简后得到:

当角度误差θ-φ值很小时,有:

E×(θ-φ) 值表示转子的角度误差与转换器的数字角度输出二者的差值。Type-Ⅱ跟踪环路消除了误差信号。完成该操作后,φ等于旋转角θ。
3 电路设计
在该算法的实现过程中,通过对Type-Ⅱ跟踪环路算法的具体分析,将算法实现的过程按照其功能使用Verilog硬件描述语言进行RTL描述,具体功能单元有查找表模块、乘法器、解调器、积分器等,搭建ASIC环境。利用查找表模块完成三角函数变换,将位置值转换为正弦与余弦;在乘法器模块将带有位置信息的正余弦与输入调幅波相乘,得到上面公式(3)与公式(4)所需信号;利用乘法器与滤波器组合的相敏检测解调器完成公式(5)、公式(6)的计算过程。

图2 ASIC验证结构框图
主要功能结构模块描述:
(1)查找表结构
ROM中包含正弦信号[0,π/2]的数据,所以ROM中的数据值可由式(7)及(8)表示。

式(7)与(8)意味着在[0,π/2]内的正弦值,可由[0,π/4]的正弦值与余弦值共同构成,同理,在[0,π/2]内的余弦值可由[0,π/4]的余弦值与正弦值共同构成。根据这一特性,可将原ROM拆分成两个深度相同的小ROM,分别存放[0,π/4]内的正弦值与余弦值,从而能够同时产生精确的互补信号。
图3给出了精确互补信号产生原理,将原有ROM按照正余弦信号的互补特性拆分成ROM1与ROM2,使得在同时产生正余弦信号时,两路通道交替使用ROM1、ROM2的数据,从而精确产生相差为π/2的正余弦信号。由于ROM1与ROM2各为原ROM的一半,因此总的ROM大小并未改变,只需增加较少的逻辑电路,便可产生精确的互补正余弦信号,大大节约了硬件资源。

图3 精确互补信号产生原理
(2)解调器结构
解调器由乘法器与滤波器组成。乘法器使用传统的booth乘法器,使用固定IP,不做详细描述。滤波器使用MATLAB固定生成。MATLAB提供了一种简便的图形工具——FDATool滤波器设计分析工具箱和SPTool信号处理工具箱。利用这两个工具可以使复杂的滤波器设计方法变得简单。只需要在图形工具中选择相应的滤波器设计方法并填入滤波器设计指标,即可生成相应的频率响应特性。
(3)积分器原理
数字积分器原理就是采样值求和的累加。使用固定模型,不做详细描述。
4 仿真验证
仿真验证过程中使用变压器模型模拟旋变电机的输出波形,在固定的转速情况下旋变电机的输出是转速与激励频率混频的调幅波,利用变压器模型输出得到此调幅波的模拟量。利用ADC的采样原理对模拟调幅波进行采样计算,得到数字化的调幅波。如图4所示。将调制后的调幅波进行数字化作为输入信号。此输入信号按照ΣΔ过采样原理进行调制,得到验证RDC算法的输入信号。
将数字化的电机信号输入RDC IP环境,通过图2所示的架构模型进行仿真,Type-Ⅱ型RDC算法的整体仿真波形如图5所示,模拟固定速度的电机输入,通过跟踪算法计算速度与位置信息,得到正确的速度位置值,此时得到的信息为数字化信息。图5所示速度输出值为H3ffe,位置输出以固定周期循环变化。
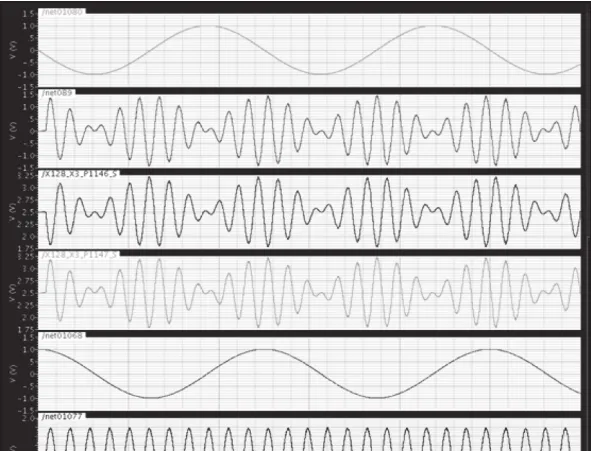
图4 旋变输入输出波形
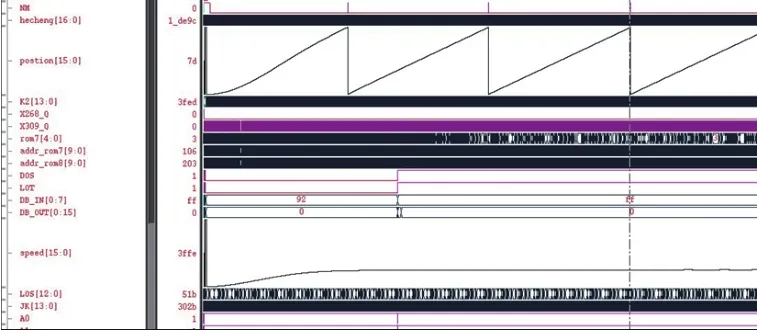
图5 仿真结果
更改电机旋转速度、方向,对此IP进行全方位测试验证,如图6所示,不同转速与不同方向得到的仿真结果。不同转速仿真得到的速度输出值不同,位置输出变化周期不同;速度输出首位代表方向,正方向旋转得到速度输出值首位为0,负方向旋转得到速度输出值首位为1。

图6 变换转速、方向后的仿真波形
5 结论
本文对Type-Ⅱ型RDC算法进行了详细论述,并使用ASIC实现,取得的研究成果在实际应用中用于某款SoC的设计,实测数据如图7所示,得到的结果是令人满意的。

图7 RDC应用实测波形
参考文献:
[1]Jakub Szymczak, Shane O’Meara, Johnny S Gealon, Christopher Nelson De La Rama. 精密旋变数字转换器测量角位置和速度[J]. Analog Dialogue, March 2014, 48-03.
[2]刘仕钊. 一种高精度低成本旋转变压器信号解算器设计[J]. 微特电机,2011,10.
[3]吕永健,逯国亮,陈天如. 某固态旋转变压器接口电路的改进设计[J]. 计算机测量与控制,2008(16).
[4]李雪梅,张宏财,王学伟. 基于DDS技术的信号源设计[J]. 电测与仪表,2010(01).
[5]郝建卫. 基于FPGA的脉冲宽度调制发生器[J]. 计算机工程,2013(02).
刘太广(1984—),男,内蒙古人,毕业于电子科技大学,研究方向为数字集成电路设计。

产品、应用于市场
微电子制造与可靠性
A Design of Circuit of RDC on the Basic of the Type Ⅱ Tracking Loop Algorithm
LIU Taiguang, BAO Shenghui, MIAO Yun, QIANG Xiaoyan
(China Electronic Technlogy Group Corporation No.58 Research Institute, Wuxi 214035, China)
Abstract:For improve integration circuit of electromotor control DSP, setup the new IP with RDC circuit, exactitude running after the relative position, this paper is focus on achieving a successful procedure of RDC on the basic of the type Ⅱtracking loop algorithm. In order to process the RDC, the relative position and speed will be calculated by a set of functions which will extract the key information from the input signals. A new IP with improved RDC algorithm based on typeⅡtracking loop algorithm is proposed, use the look-up-table to complete SIN/COS conversion and use Multiplication and Filter combination to demodulation. The language for describing the logic system is Verilog, which is a explicit way to explain the algorithm, which shows its advantage in integrate circuit.
Keywords:Type-Ⅱ; RDC; Tracking loop
作者简介:
收稿日期:2015-10-14
中图分类号:TN 402
文献标识码:A
文章编号:1681-1070(2016)01-0031-03