过载系数未知的反舰导弹跃升俯冲过程跟踪算法*
2016-03-24刘杨姜礼平
刘杨,姜礼平
(海军工程大学,武汉 430033)
过载系数未知的反舰导弹跃升俯冲过程跟踪算法*
刘杨,姜礼平
(海军工程大学,武汉430033)
摘要:针对反舰导弹跃升机动过程的跟踪中,过载系数未知导致跟踪模型与导弹实际运动的不匹配问题,对状态变量进行扩展,应用扩展卡尔曼滤波对过载系数实时估计,实现对跃升俯冲机动过程的跟踪。仿真结果表明,该算法可准确估计出过载系数,显著提高跟踪性能。
关键词:标跟踪,跃升俯冲,扩展卡尔曼滤波
0 引言
为增强反舰导弹的突防能力,适应海军复杂化、多样化的作战任务,反舰导弹的攻击模式越来越灵活多样[1]。当前反舰导弹的弹道模式主要有直进式、高空巡航俯冲攻击式,低空巡航攻击式及掠海巡航攻击式[2]。图1展示了反舰导弹的几种典型弹道。各弹道的末端自导攻击方式一般有继续平飞攻击式和跃升俯冲机动式两种。其中末端跃升俯冲攻击弹道在距离目标舰几千米的地方突然跃起,以一定角度和角速度爬升到一定高度,然后导弹弹头急速旋转,转过一定角度,以较大俯冲角度俯冲攻击目标。末端跃升俯冲攻击可以有效地逃避火炮攻击,提高对舰身上部和雷达设备的毁伤效果。“鱼叉”、“捕鲸叉”、“战斧”、“奥托马特”I型和“信天翁”、“雄风”、“白蛉”等反舰导弹均采用类似攻击弹道。

图1典型反舰导弹弹道
研究跃升俯冲弹道对有效跟踪敌方反舰导弹,提高舰艇近程防空能力有着重要意义。目前研究较为普遍的匀速、匀加速模型不适用于跃升俯冲机动段的跟踪[3-4]。文献[5]提出了一种基于弹道规律的跃升俯冲运动跟踪方法,但文中假设导弹过载系数已知,此时系统模型已知,从而可以利用基本的滤波方法进行跟踪。在过载系数未知,系统模型不明晰时,就需要在线对过载系数进行估计。本文对状态变量进行扩充,将过载系数作为状态变量,应用扩展卡尔曼滤波器对过载系数进行估计的同时,实现对跃升俯冲弹道的跟踪。
1 跃升俯冲攻击弹道模型
由动力学规律可知,导弹的运动是由其质心运动和绕其质心的转动所组成的[2],但在研究导弹的飞行弹道及跟踪模型时,可将导弹简化为可操纵质点,在弹体坐标系下,设定x方向指向目标舰艇,则可建立铅垂面下的导弹运动方程组:
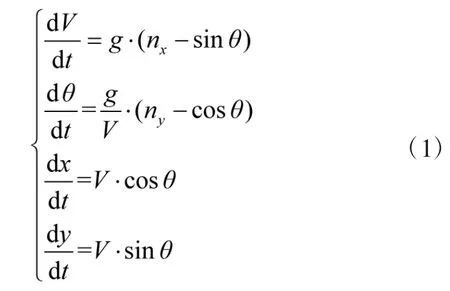
式中,V为导弹速度;g为重力加速度;nx为切向过载,是过载矢量在速度方向上的投影;ny为法向过载,是过载矢量在垂直于速度方向上的投影;θ为弹道倾角;x、y为导弹在直角坐标系中的坐标。
2 过载系数未知的EKF跟踪算法
弹道模型反映了导弹铅垂平面内运动的动力学规律,过载系数nx、ny决定了跃升俯冲运动的运动模式。因此,基于过载控制的弹道最优设计也逐渐成为设计导弹弹道的基本方法[6],以应对传统高度控制法难于处理高低结合弹道的问题。
利用差分公式,式(1)可离散化为[7]

可见该模型的状态方程是非线性的,在已知过载系数nx、ny时,可将式(3)线性化,取一阶近似,有状态转移矩阵
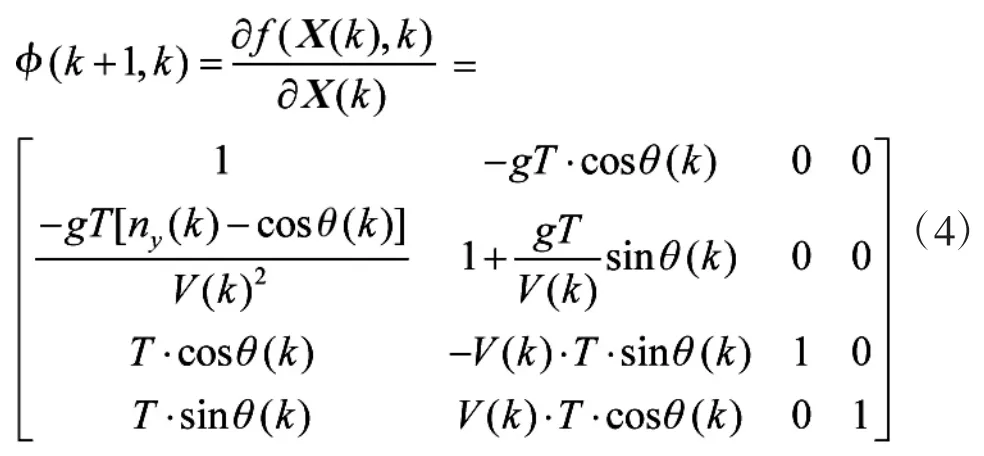
在获取量测信息后,即可应用扩展卡尔曼滤波[8 - 9]进行跟踪。
在过载系数nx、ny未知时,式(4)中存在未知量,无法直接进行滤波,现将nx、ny扩充为状态变量,状态变量。有
此时状态转移矩阵
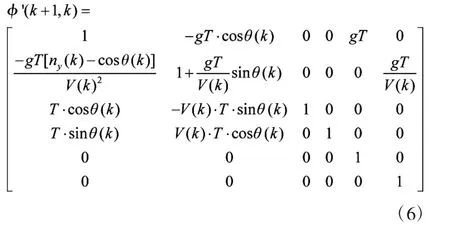
令

有线性化状态方程


设雷达可观测到导弹x、y方向的坐标,有量测方程

至此,即可运用扩展卡尔曼滤波对导弹运动状态进行估计,得到各个时刻导弹的估计状态,实现对导弹的跟踪。
3 仿真计算分析
现对一进行跃升机动的反舰导弹目标进行跟踪,导弹开始跃升的初始位置为(3 000 m,15 m),速度为800 m/s,初始过载系数nx=0.2,ny=-1.8,达到指定高度后法向过载系数ny变为1.8,直至命中目标。x、y方向的量测误差方差均为100 m2,采样时间为0.02 s。
分别采用未进行状态扩展的状态方程(4)和扩展状态后的状态方程(6)对观测值进行滤波,以下分别称之为方法1,方法2。方法1的状态方程(4)中设定nx=0.2,ny=-1.8,滤波器的其他初始参数均相同。
导弹轨迹及跟踪效果如图2所示。

图2导弹轨迹及滤波效果图
方法1、方法2在x、y方向、仰角及速度的跟踪效果分别如图3所示。可见在法向过载未变化时方法1、方法2具有相近的跟踪性能。但在法向过载发生变化后,由于方法1不能及时辨识出过载系数,使得跟踪误差逐渐增大,在y方向和仰角的估计上误差增加尤其明显。而方法2通过在线估计过载系数,保证了状态转移方程较为准确地描述导弹实际运动过程,对目标位置、速度、仰角的跟踪效果均明显好于方法1。
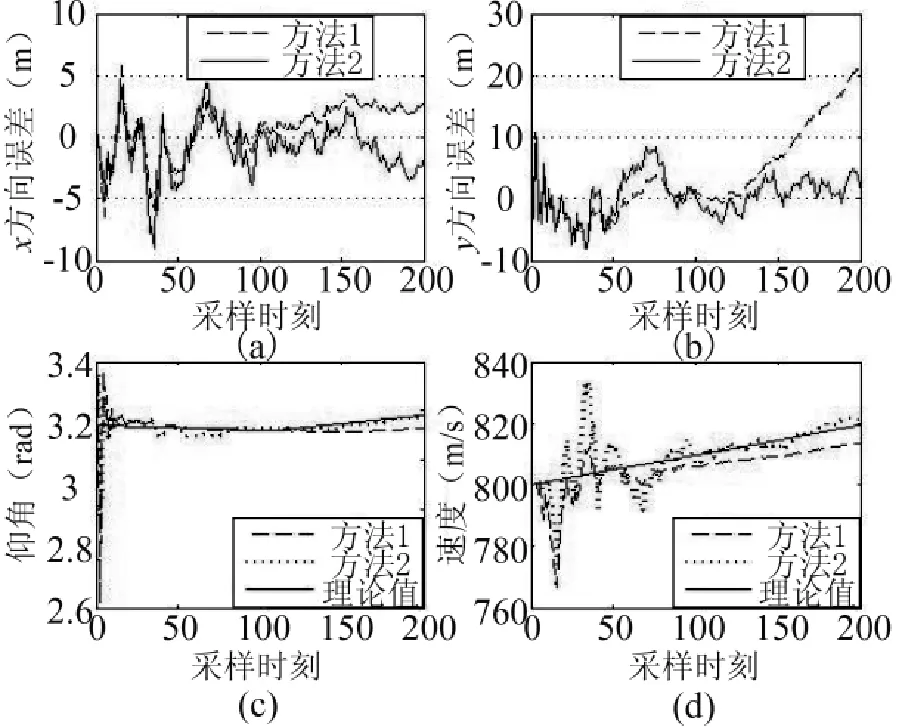
图3位置、速度、仰角跟踪效果对比
定义如下性能指标:
两种算法的跟踪性能如表1所示。
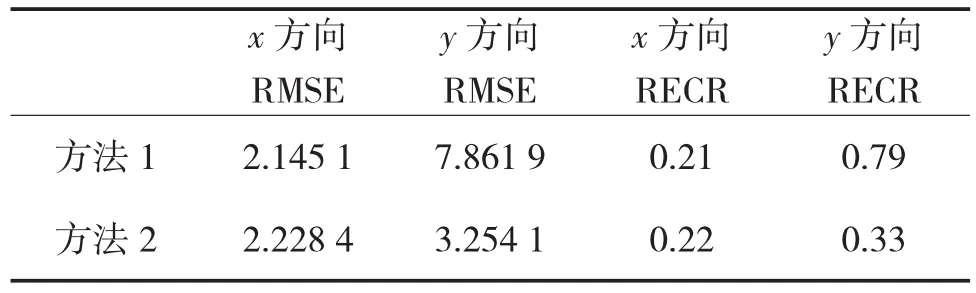
表1两种算法跟踪性能
在x方向上方法1、方法2的跟踪性能相近,方法1略好。由于方法1中状态方程的nx、ny为导弹实际过载系数,且切向过载未发生变化,该方向上状态转移方程可较好描述实际过程,因此,方法1在x方向的跟踪性能较好。方法2取得了与方法1相近的性能,说明方法2能准确地估计出切向过载系数。
在y方向上,方法2的均方根误差减小了60%,改进效果显著。这是因为y方向的过载系数在导弹达到预设高度后即发生了变化,此时方法1中的状态转移方程已不能较好地与实际运动过程匹配,从而产生了较大跟踪误差。方法2对nx、ny的估计如图4所示,图中虚线为真实过载系数,可见过载系数均收敛到了真实值。
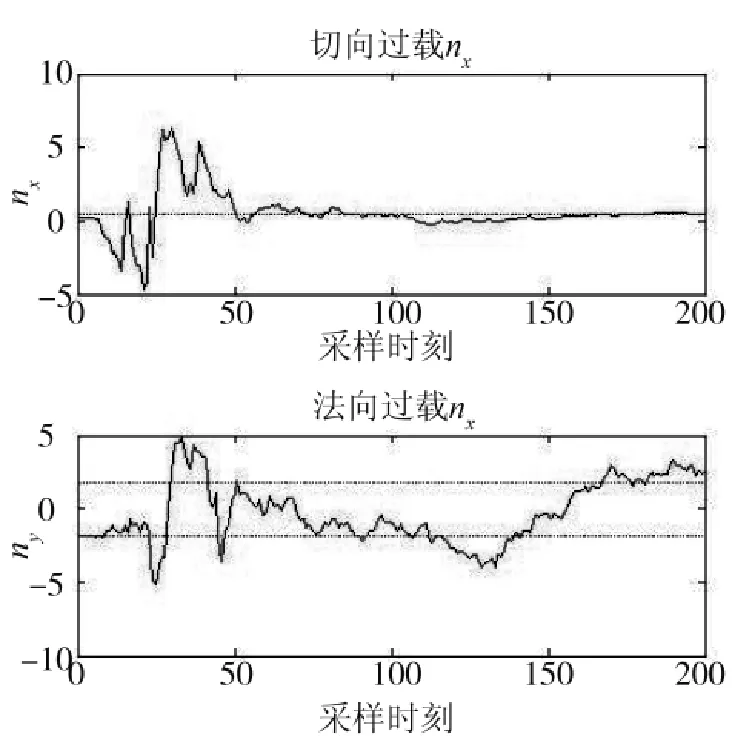
图4过载系数估计
4 结论
本文在跃升俯冲攻击弹道模型的基础上,在过
载系数未知时,扩展状态变量,应用扩展卡尔曼滤波器实现了对跃升俯冲机动过程的有效跟踪。该算法同样可应用到其他未知系统参数的目标跟踪过程中,改善跟踪性能。其中进一步提高未知参数估计的收敛速度可作为下一步研究工作内容。
参考文献:
[1]高文春,张岩,龙腾,等.舰载反导跟踪算法与模型分析[J].系统工程与电子技术,2000,22(8):48-51.
[2]李新国,方群.有翼导弹飞行动力学[M].西安:西北工业大学出版社,2004.
[3]LI X R,JILKOV V P. A survey of maneu-vering target tracking part I:dynamic models[J].IEEE Trans. Aerospace and Electronic Systems,2003,39(4):1333-1363.
[4]LI X R,JILKOV V P. A survey of maneuvering target tracking part II:ballistic target models[C]//Proc. 2001 SPIE Conf. on Signal and Data Processing of Small Targets,San Diego,CA,USA,2001.
[5]张丕旭,石章松,刘忠.一种基于弹道模型的机动目标跟踪算法[J].弹箭与制导学报,2009,9(4):55-62.
[6]王海斌.过载控制在反舰导弹弹道模型设计中的运用研究[J].舰船电子工程,2010,30(10):101-104.
[7]石章松,刘忠.目标跟踪方法与数据融合理论及方法[M].北京:国防工业出版社,2010.
[8]何友,张晶炜.雷达数据处理及应用[M].北京:电子工业出版社,2009.
[9]王成,王英民,陶林伟,等.扩展卡尔曼滤波在双基地信息融合中的应用[J].火力与指挥控制,2010,35(9):13-15.
A Maneuvering Target Tracking Algorithm Based on Zoom and Dive Model with Unknown Overcapacity Factor
LIU Yang,JIANG Li-ping
(Naval University of Engineering,Wuhan 430033,China)
Abstract:Focused on the mismatch of tracking model with the real movement of modern anti-ship missile caused by unknown overcapacity factor,a maneuvering target tracking algorithm using Extended Kalman Filter(EKF)is presented. State variables are extended in order to improve tracking performance. The performance of the algorithm was compared with target tracking algorithms based on normal EKF. The simulation results show that the method is right and feasible to estimate accurate overcapacity factor.
Key words:target tracking,zoom and dive,extended kalman filter
作者简介:刘杨(1987-),男,山东淄博人,博士研究生。研究方向:目标跟踪与信息融合。
*基金项目:国家自然科学基金资助项目(6107419)
收稿日期:2014-12-27修回日期:2015-02-07
文章编号:1002-0640(2016)02-0047-03
中图分类号:TJ761·14
文献标识码:A