激光扫描精密施肥定位机械装置研究—基于PLC控制
2016-03-23朱清智汪小志
宣 峰,朱清智,梁 硕,汪小志
(1.河南工业职业技术学院,河南 南阳 473000;2.南昌工学院,南昌 330108;3.南昌大学 资源环境与化工学院,南昌 330031)
激光扫描精密施肥定位机械装置研究
—基于PLC控制
宣峰1,朱清智1,梁硕1,汪小志2,3
(1.河南工业职业技术学院,河南 南阳473000;2.南昌工学院,南昌330108;3.南昌大学 资源环境与化工学院,南昌330031)
摘要:为了提高施肥的精度,实现施肥过程的自动化,设计了一款新的激光扫描定位PLC自动化控制的精密施肥机器人。采用PID调节的方式设计了机器人的PLC控制闭环系统,以激光扫描得到的施肥深度为依据,通过逻辑判断调整变速器的传动比,实现不同深度的施肥效果,提高了施肥作业的智能化水平及施肥的精度。为了验证装置的有效性和可靠性,在田间对精密施肥机器人进行了测试。田间测试发现:对于施肥长度为50m的作业,所设计的施肥机器人的施肥时间明显降低,大大提高了作业效率,施肥合格率明显高于传统的施肥机器人,可在精密化施肥和自动化农业生产中进行推广。
关键词:施肥精度;PLC控制;激光扫描;反馈调节
0引言
农业机器人融合了众多的技术,主要包括传感技术、监测技术、人工智能技术、通讯技术、图像识别技术、精密技术及系统集成技术等。它使得多种前沿科学技术于一身,使人们从繁重的农业生产劳动中脱离出来,且大大提高了机械作业的效率和质量。施肥机器人的作业过程如图1所示。
该机器人可以有效改善农村劳动力不足,降低劳动强度,并且减少农药、化肥等对人体的伤害。
1精密施肥定位装置结构设计
精密施肥的控制主要是对变速箱差速器的控制。施肥机器人主要由5部分构成,包括动力源部分、减速差速器部分、方向控制部分、储料箱部分及施肥控制部分,其轴测图和前视图如图2所示。
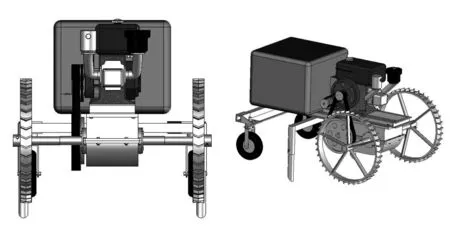
图2 施肥机器人轴测图和前视图
该机动力是由动力源部分提供,主要是柴油机;差速器包括减速箱、差速器及离合器,这3者可以实现机构的启停控制与动力的分配;减速器的控制采用继电器控制,而继电器的反馈调节主要根据激光扫描信号的反馈和PLC控制实现。
图3表示减速器外观图和内部结构。利用继电器可以控制带差速度和圆锥齿轮减速器,从而实现机器人的优化配置。其中,带差速器的圆锥齿轮减速器总体布置如图4所示。
图4中:假设机器人阻力为F,转矩为T,圆周速度为v,转速为n,则柴油机的输出功率为
(1)
其中,Pd为发动机输出功率;Pw为工作机所需功率;ηa为传动装置效率;ηw为工作机效率。假设前轮的直径为D,轮子的转速为n,则机器人的速度为
(2)
施肥机器人的精密控制主要通过结构的传动比优化配置来实现。机构的总传动比计算公式为
(3)
传动比的分配如下
i=i1×i2×i3
(4)
考虑到适应性与成本问题,采用平行四边形的结构的联动设计较为简单,因此将其作为联动结构,如图5所示。

图3 减速器外观图和内部结构
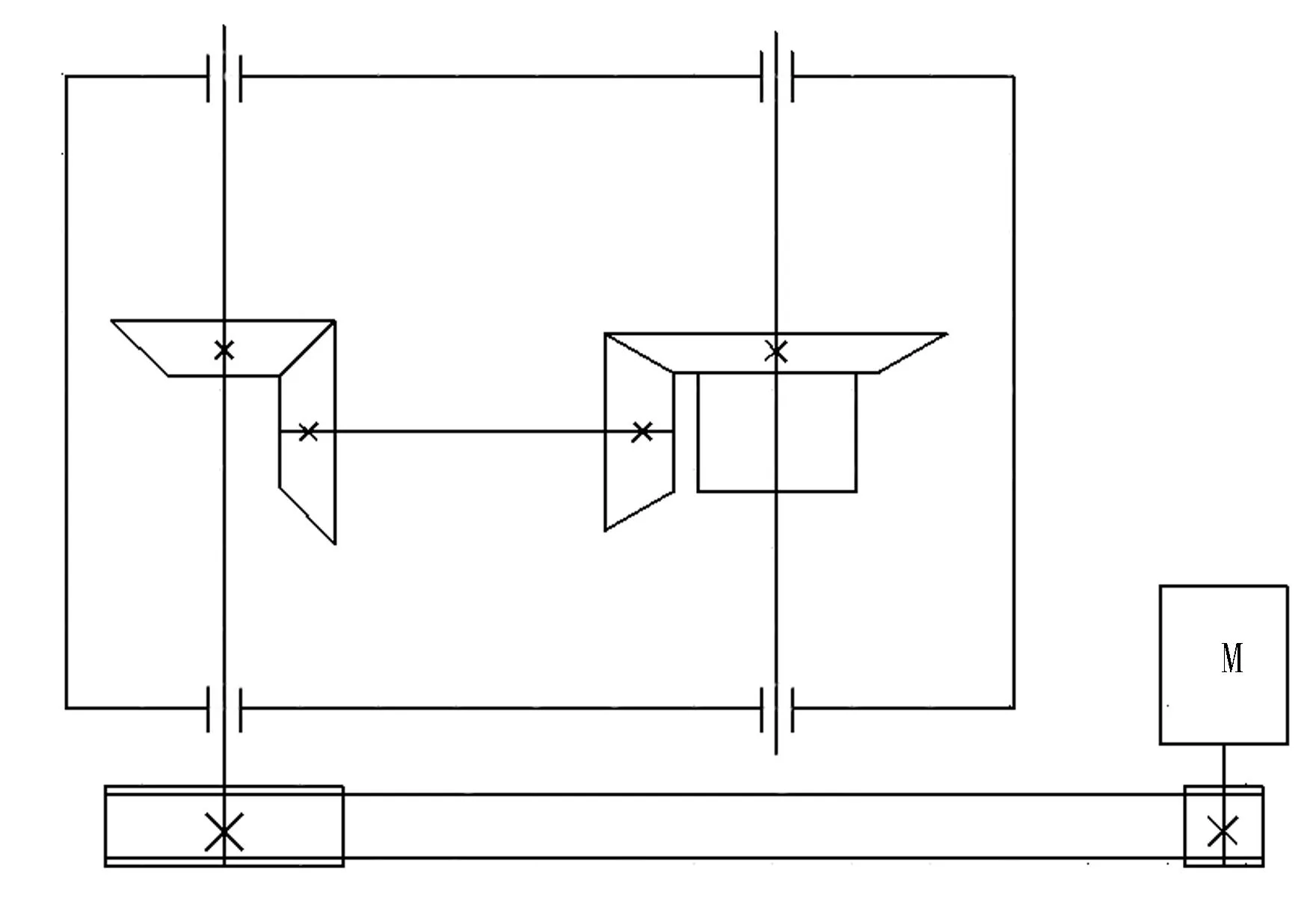
图4 带差速器的圆锥齿轮减速器示意图

图5 平行四边形机构图
在设计平行四边形机构时,考虑到对于不同地垄宽度的适应性,在联动杆上设置了3个间距。当地垄宽度不同时,可以进行适应性的调节,以便使得轮子的边缘正好坐落于地垄之间的沟槽内。为了实现施肥的精密控制,使用PID控制器来调整变速箱的传动比。PID控制器是一种结构简单的线性控制器,其结构如图6所示。

图6 PID控制器
利用PID控制器对变速箱的传动比进行控制,其控制方程为
(5)
其中,kp为积分系数;ki为微分系数;T为采样周期;e为施肥深度的控制误差,施肥深度可以通过激光扫描定位来实现。
2施肥过程激光扫描定位和PLC控制
施肥过程的施肥深度主要由PLC控制系统来实现。在本系统设计中,选用的激光器的型号为LD-G650A13。激光器的具体参数如表1所示。
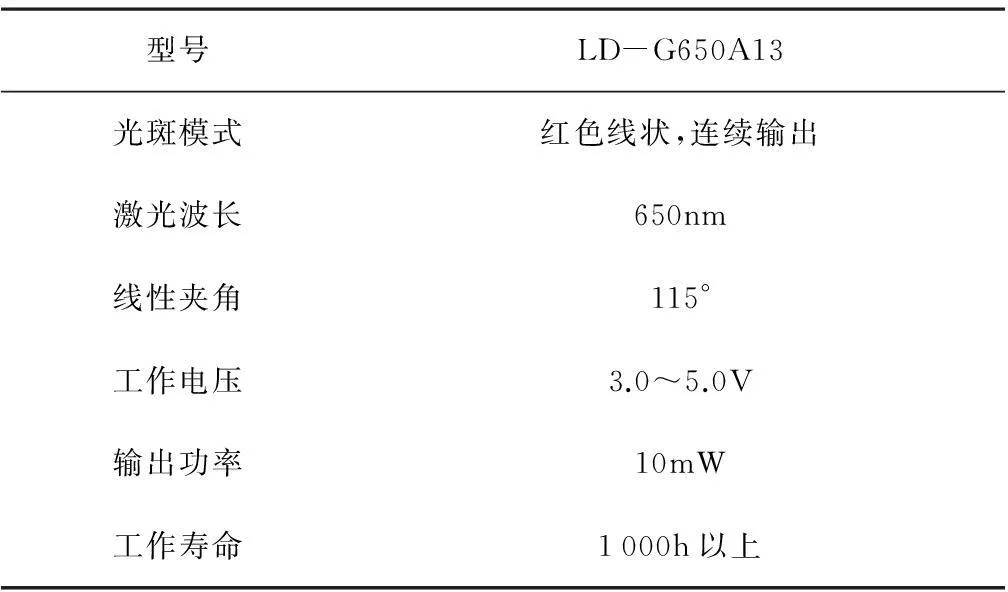
表1 激光器参数表
出于安全性的考虑,所选用的激光器功率为10mW,属于安全的功率范围。激光器工作时的功率比较小,在该功率的激光照射下,物质不会发生化学物理变化,激光内置直流电进行供电。
图7为设计的激光器实物图。其中,激光器的控制主要由上位机系统和下位机系统组成。上位机还包括PC主机、PC连接相机和数据通信接口;下位机包括主控制器、激光器驱动器、激光器、步进电机驱动器、步进电机及通信接口等。系统硬件结构组成如图8所示。

图7 激光器实物图
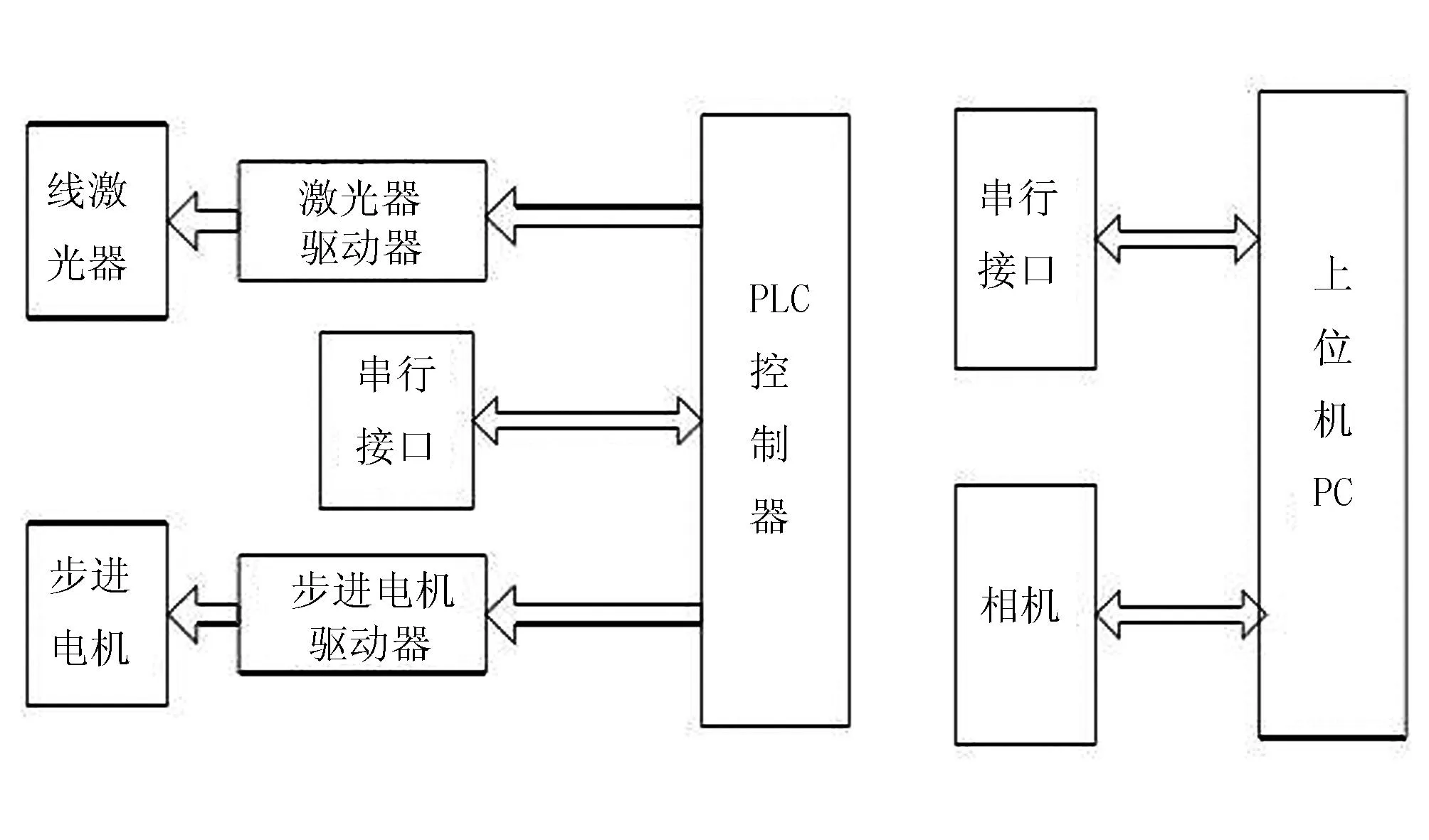
图8 系统硬件结构组成
PLC作为下位机控制器,通过RS232通讯总线,直接与上位系统处理中心进行通讯。PLC主要控制变速箱传递比的输出,激光扫描会随时将施肥深度信息传递给数据存储;通过MAD02模拟量模块A/D转化后,将数量与预设值进行比对,实现PLC对施肥执行机构的控制。该系统是闭环系统,如图9所示。
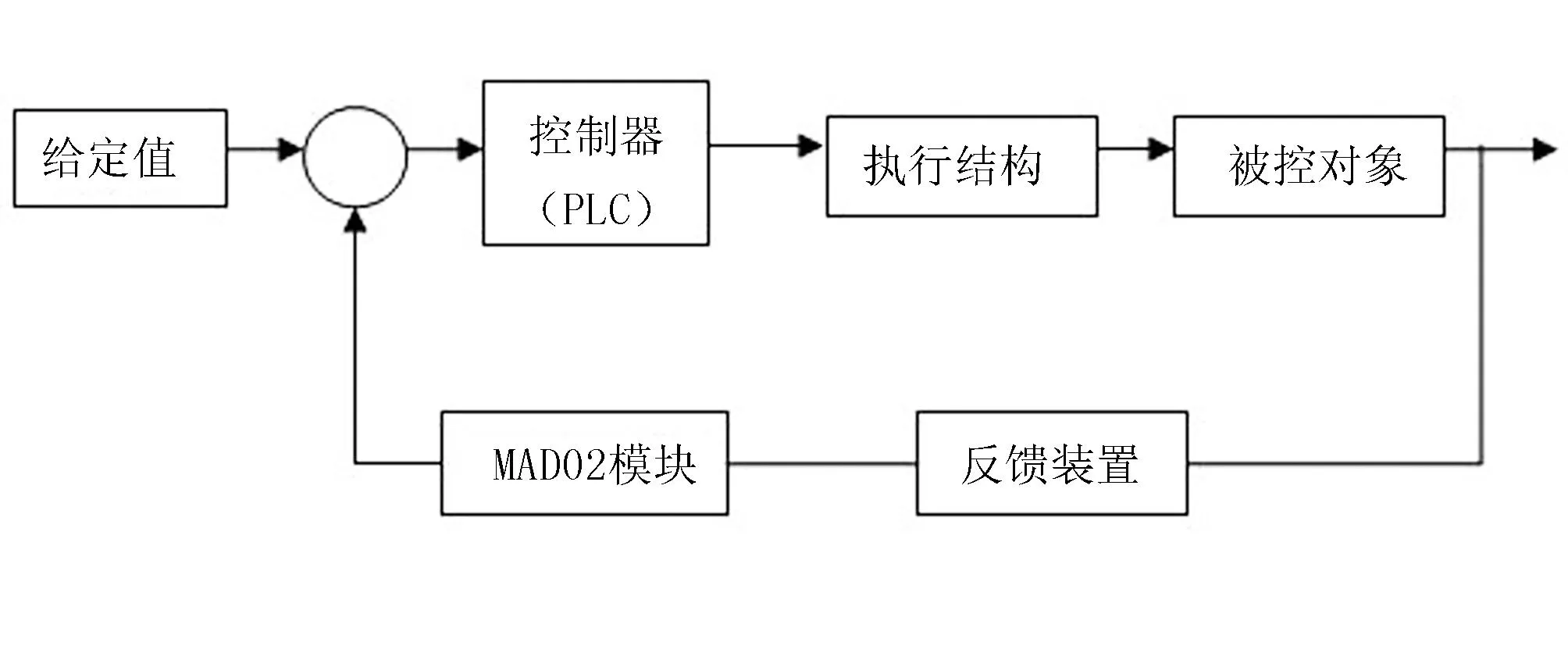
图9 PLC控制系统简单示意图
在运行速度方面,CPM2A CPU完成一条逻辑指令的运行速度仅为1.72us,完全可以胜任在施肥精密控制机械装置中的应用。
3精密施肥机器人测试结果与分析
为了测试本设计的精密施肥机器人的有效性和可靠性,在试验田间对机器人的施肥效果进行了综合试验。通过测试,首先得到了机器人激光扫描施肥深度的测试结果,如图10所示。

图10 激光扫描施肥深度测试结果
由图10可以看出:通过激光扫描施肥深度的轮廓明显,且通过上位机可以准确地判断施肥深度,从而达到精确控制的目的。
图11表示激光扫描深度的测试结果。由图11可以看出:通过激光扫描,可以准确地测试出施肥深度。其中,施肥采用打孔施肥,施肥深度为2.0cm,符合设计要求。
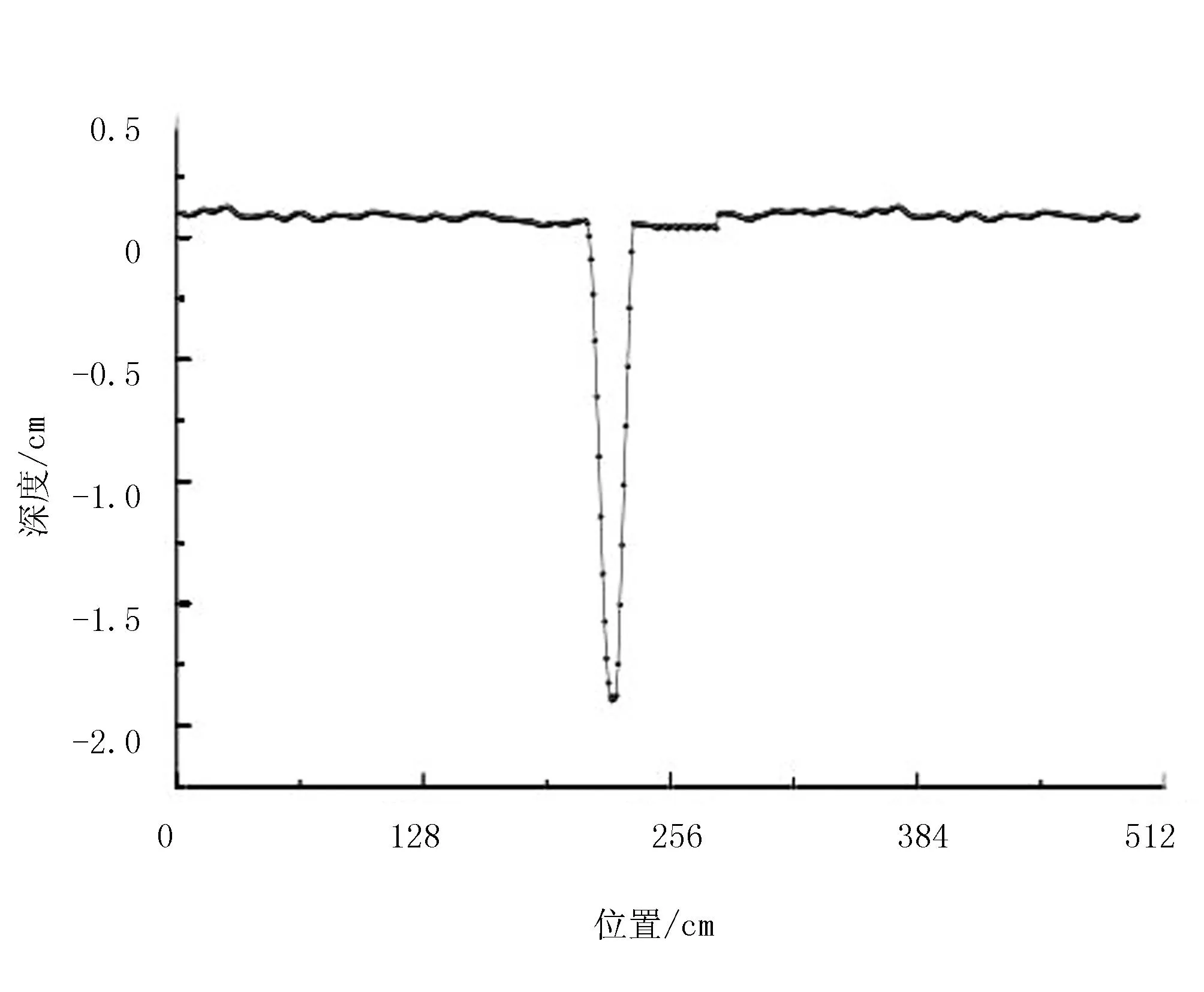
图11 激光扫描深度测试结果
图12为通过多次调试施肥机器人执行末端响应时间。由图12可以看出:多次试验的响应时间都较短,且鲁棒性较好,响应过程平稳。通过对比传统机器人和本文设计机器人的施肥时间,得到了如表2所示的结果。
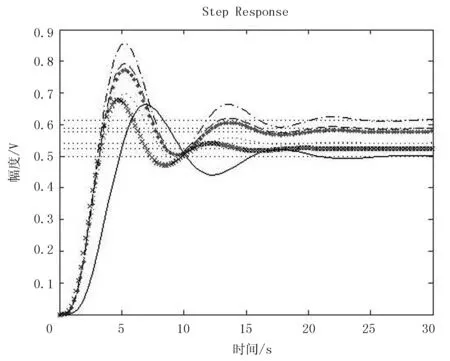
图12 多次调试系统响应结果

测试编号传统施肥机器人施肥时间本文设计机器人施肥时间120.2110.13221.3210.24320.4810.35421.8910.22523.2710.25625.1110.31
由表2可以看出:相对于传统的施肥机器人,本文设计的施肥机器人的施肥时间明显降低,大大提高了作业效率。
表3表示施肥合格率的测试数据。由表3可以看出:采用本文设计的施肥机器人施肥合格率明显高于传统的施肥机器人。这是由于激光扫描定位具有较高的精度,从而大大提高了施肥的合格率,提高了作业的机械效率。
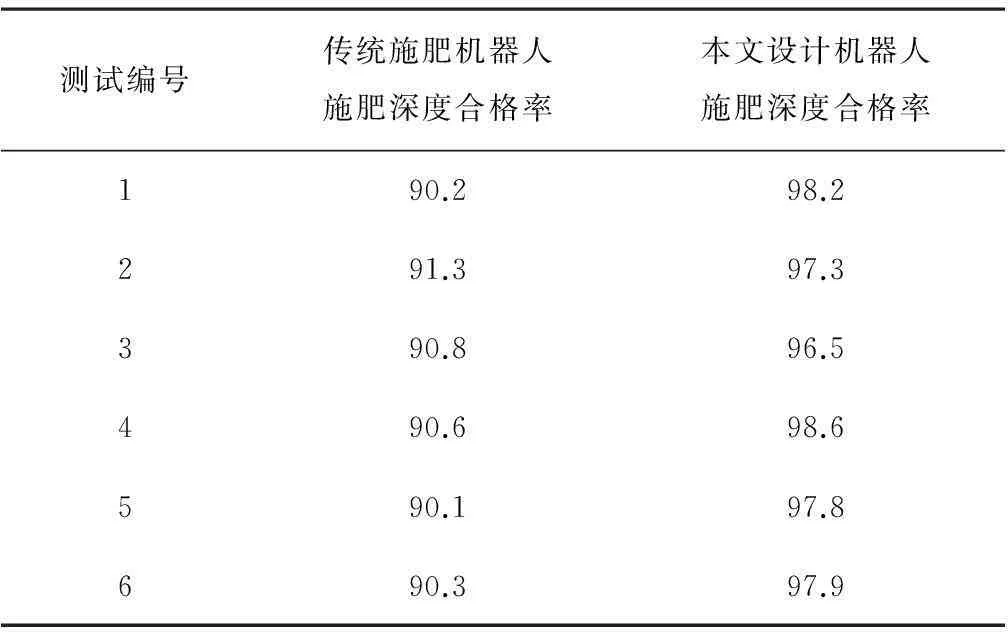
表3 施肥合格率测试数据统计
4结论
对传统施肥机器人进行了改造,并使用现代PLC控制和经典PID控制器对施肥系统进行了优化。同时,利用激光扫描设备设计了闭环的施肥精度调节系统,从而大大提高了施肥作业的机械自动化和智能化水平。
对设计的精密施肥机器人进行了田间测试,测试项目主要包括施肥时间和施肥深度合格率。通过田间测试发现:对于施肥长度为50m的施肥作业,本施肥机器人的施肥时间和施肥合格率都明显优于传统的施肥作业机器人。由此验证了该施肥机器人的可靠性,为现代化农业施肥技术的研究提供了较高价值的参考。
参考文献:
[1]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
[2]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012 (1):93-96,103.
[3]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1): 349-351.
[4]秦国成,秦贵,张艳红.设施农业装备技术现状及发展趋势[J].农机化研究,2012,34(3):81-82.
[5]张宁,廖庆喜. 我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012 (1):93-96,103.
[6]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1): 349-351.
[7]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010,32(11): 130-132,140.
[8]夏红梅,李志伟,甄文斌. 气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41 (6):56-60.
[9]胡斌,董春旺.气吸式穴盘精量播种机吸嘴吸附性能的试验研究[J].石河子大学学报,2009, 27(1):100-103.
[10]何菊,吴建民.畦作沟灌小麦起垄播种机的研究与设计[D].兰州:甘肃农业大学,2007:17-19.
[11]李界家,陈浩,李颖.神经网络算法解耦控制在中央空调系统中的应用[J].沈阳建筑大学学报,2012,28(1):182-186.
[12]李洪欣,杨建中.基于两参数的表冷器建模方法研究[J].建筑热能通风空调,2009,28(6):15-17.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于 Hough 变换的成熟草莓识别技术[J].农业机械学报,2007,38(3): 106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009,3(3):19-22.
[16]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007,12(6):41-46.
[17]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006, 9(27):1-5.
[18]李文见, 姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报:自然科学版, 2007(8):57-59.
[19]王仲民, 戈新良, 唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报, 2003,32(2):30-35.
[20]国刚, 王毅. 应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术, 2008,4(6):1459-1460.
[21]施少敏,马彦恒,陈建泗.基于BP神经网络的数字识别方法[J].兵工自动化,2006,25(10): 40-41.
[22]许颖泉.用神经网络进行数字图像识别研究[J]. 应用科技,2008(12):59-60.
Study on Fertilization Positioning Mechanism of Laser Scanning Precision—Based on PLC
Xuan Feng1, Zhu Qingzhi1, Liang Shuo1, Wang Xiaozhi2,3
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108, China; 3.School of Resources Environment & Chemical Engineering, Nanchang University, Nanchang 330031, China )
Abstract:In order to improve fertilizing precision, fertilization process automation, design a new laser scanning and positioning of the PLC automatic control of precision fertilization robot. Using PID methods to adjust the design of the robot PLC closed-loop control system, the system of fertilization depth by laser scanning as the basis, determine the transmission ratio through the transmission adjustment logic, achieve different depth of fertilization effect, improve the intelligent level of fertilization, the effectiveness of high precision fertilization device in order to verify in the field of precision and reliability, fertilization robot was tested by field test, found that, for the fertilization of length 50m fertilization, fertilization robot designed in this paper the fertilization time is significantly reduced, thereby greatly improving the work efficiency, the qualified rate of fertilization was higher than that of the traditional fertilization robot, thus greatly improve the qualified rate of fertilization, which can be used in precision fertilization and automation in agricultural production.
Key words:precision fertilization; PLC control; laser scanning; feedback control
文章编号:1003-188X(2016)06-0021-05
中图分类号:S224.21;TP273
文献标识码:A
作者简介:宣峰(1981-),男,河南南阳人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,讲师,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:国家自然科学基金青年基金项目(51305152)
收稿日期:2015-05-18
