农田视觉导航基准线的识别与提取方法研究
2016-03-23乔智利崔彦平邹新光
乔智利,崔彦平,邹新光
( 河北科技大学 机械工程学院,石家庄 050018)
农田视觉导航基准线的识别与提取方法研究
乔智利,崔彦平,邹新光
( 河北科技大学 机械工程学院,石家庄050018)
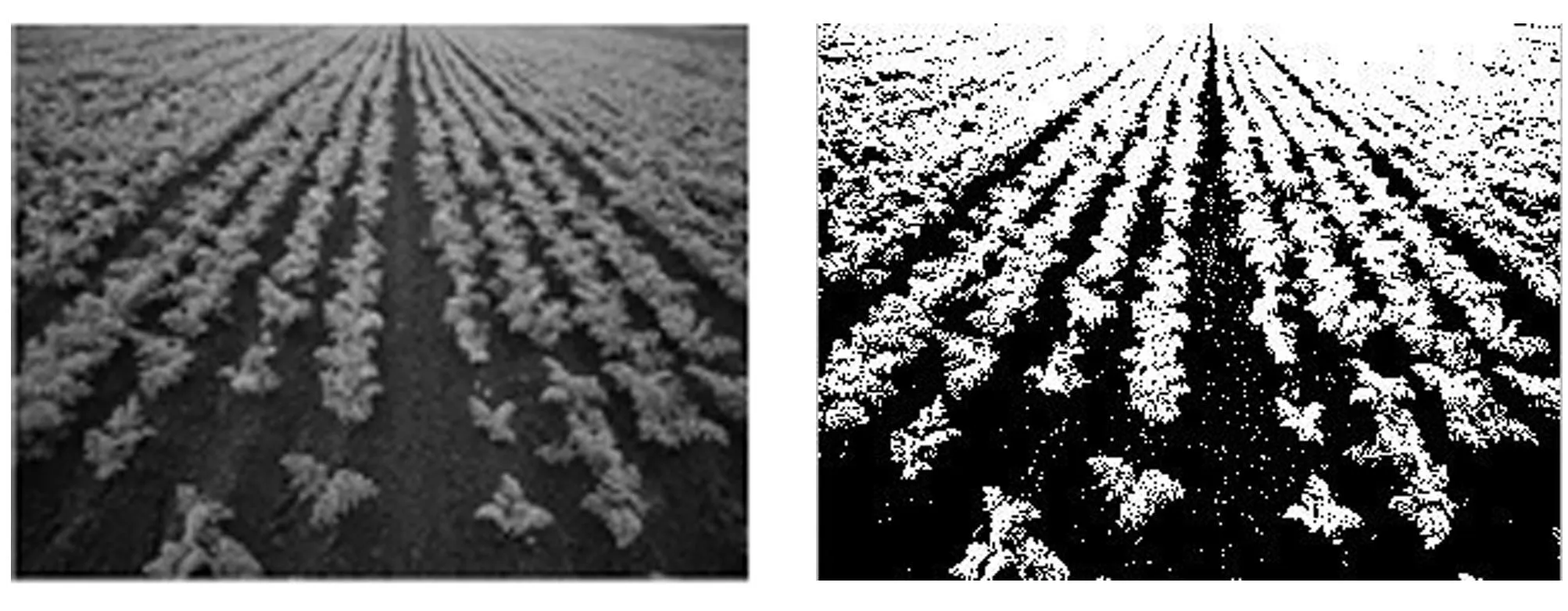
摘要:提出了一种基于农田图像处理的视觉导航基准线的提取方法。该方法首先使用加权平均法(2G-R-B)对原图像进行灰度化处理;采用改进最大化类间方差分割灰度图像;再用小面积法去噪;识别去噪后的图像的中心点,确定导航中心点位置。基于中心点的分布规律,将图像中识别出的中心点进行筛选,得到有效的导航基准中心点,使用改进霍夫变换与最小二乘法相结合的方法提取导航基准线。本文方法能够准确地识别和提取导航基准线,实验证明了该方法的有效性和实时性。
关键词:农作物;中心点;导航基准线
0引言
“精确农业”技术已被国际农业科技界认为是21世纪实现农业可持续发展的先导性技术之一[1]。农业自动化装备的自动导航技术是现代智能农业机械的一个重要组成部分。视觉方法是近年发展起来的一种先进导航方法[2],该方法是对图像进行分析处理并提取导航路径。其中,关键环节在于通过图像处理技术准确可靠地提取导航基准线[3]。
曹倩、王库[4]等人提出了先对图像进行加权平均法灰度化,再进行阈值分割和滤波,最后检测并提取导航信息。司永胜、姜国权[5]等人在此基础上提出垂直投影法,先确定作物中心点,再对中心点进行拟合,得到导航线。由于垂直投影法确定的是农作物中心点,当对种植浓密程度不均匀的农作物图像进行处理时,该方法存在定位不准确的问题。
本文提出了一种通过提取路径中心点来拟合导航基准线的导航方法。该方法使用加权平均法对原图像进行灰度化处理,然后采用改进最大化类间方差(也称Otsu算法)分割图像,再用小面积法去噪。图像预处理完成之后,进行导航基准线的拟合,首先把二值图像矩阵中每行值为1的相邻像素列坐标差值最大的点定义为路径中心点,利用路径中心点分布规律分段对其优化筛选,去除无效点;再用改进霍夫变换剔除奇异点,最后用最小二乘法拟合导航基准线。
1农田图像预处理
1.12G-R-B灰度变换
根据RGB三基色原理[6],各种颜色的光都可以由红(R)、绿(G)、蓝(B)3种基色加权混合而成。大部分农作物在生长期具有较高的G值,而农作物的背景R和B值较高。Ohta等人归纳出3个正交的彩色特征[7],有
(1)
本文采用加权平均法灰度化方法,即I3特征,该方法对RGB模型中G分量加大权重,符合有较高G值的农作物图像灰度化处理。
1.2灰度图像阈值分割
经灰度化处理后,农田图像直方图多数有双峰但无明显低谷,或者双峰与低谷都不明显。Otsu算法[8-9]可以实现阈值的自动选取且能够得到较为满意的效果;但由于它对图像中每一个像素查找最优阈值,导致该方法耗时较长。
本文采用改进Otsu算法[10-11]:求出灰度值的均值μ;农田图像灰度化后,农作物的灰度值会明显大于背景灰度值;农作物的灰度值肯定大于灰度值的均值μ,把均值μ定为寻找最优阈值的下限。
均值μ把图像灰度值分为两个部分。设大于μ的区域为D,再计算D区域的灰度值均值,有
(2)
式中fD(i,j)—区域D中点(i,j)的灰度值;
ND—区域D中像素点的总个数。
区域D中包括农作物的像素点和少量农作物背景像素点。如果区域D中农作物背景灰度的均值为μ0,必有μ0<μD,且有μ0<μ, 最优阈值寻找区间为(μ,μD)。在此区间内,用Otsu算法寻找最优阈值,这样可以大大缩短时间。
1.3去除噪声
由于农田环境自身的特点,阈值分割后的图像还存在杂草、土块等引起的颗粒状噪声,这些噪声都是一些离散的点。去除噪声,常用的滤波方法为中值滤波[12-14]。中值滤波对脉冲干扰和椒盐噪声的抑制效果好,但对点、线细节较多的图像不太合适。实际农田图像中颗粒状噪声点大小不均且数量较多,用中值滤波效果并不理想。这些噪声点和农作物相比面积较小,所以根据面积大小进行滤波[13,15],即小面积法滤波,若S(x,y) ≤10,则把这块区域的值都赋为0。则有
(3)
实际背景复杂图像中包含有很多干扰,比如小土块干扰的噪声点比较大。小面积滤波可以去除比较大的噪声点,所以用小面积滤波比中值滤波效果理想。
2导航基准线的确定
2.1导航路径中心点的确定
导航基准线是视觉导航车行走的基准,以此基准进行路径规划和动作。导航基准线是由中心点来确定的,所以确定导航基准线的基础是先确定中心点。中心点是通过扫描图像中每条水平线来确定的,下文介绍其确定方法。
在图像预处理后,得到二值图是一个矩阵,该矩阵中只有值为0和1的元素,下文中把它称为图像矩阵。把图像矩阵中值为1的区域认为是农作物,值为0的区域认为是路径。对于农田图像来说,应该在比较宽的农作物行间查找航路径的中心点。本文用列坐标最大差值法来识别中心点,基本思想是:
1) 确定农作物矩阵。在图像矩阵中,找到所有值为1元素的列坐标的值,将其组成一个新的矩阵,本文称其为农作物矩阵C。
2)确定最大差值。对农作物矩阵C中左右相邻元素做差运算。在每一行中寻找最大差值,有
Mi=max(Ci(j+1)-Cij)
(4)
其中,Mi为最大差值;Cij&Ci(j+1)为矩阵C中左右相邻的元素。
3)确定中心点。在矩阵C中,找到每一行中差值最大的两个元素。本文把这两个元素的均值定义为图像中路径的中心点的列坐标。
以图1(a)矩阵为例,区域1和区域2都是路径。通过上述方法,提取出的中心点为如图1(b)中阴影区域。区域2比区域1宽,所以区域2中这些中心点适合作为路径中心点。
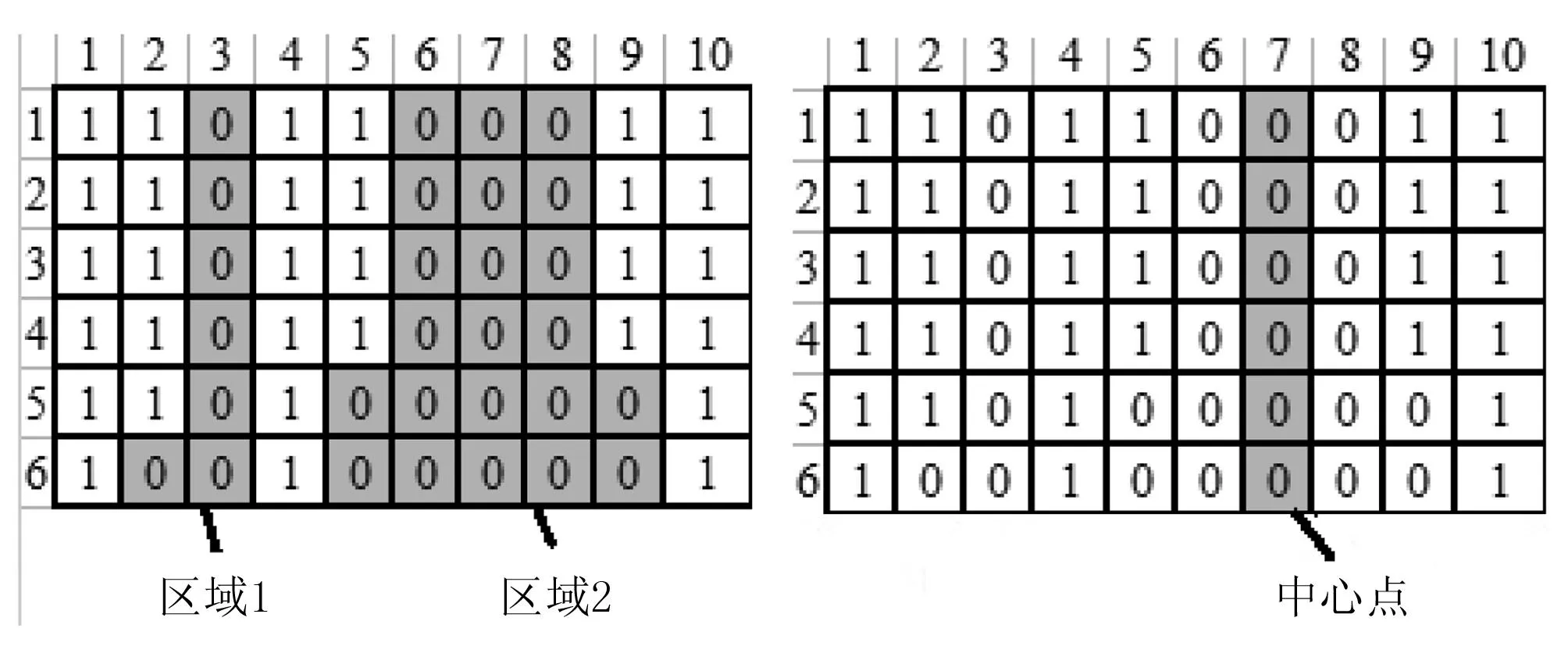
(a) 6×12矩阵 (b) 中心点的识别
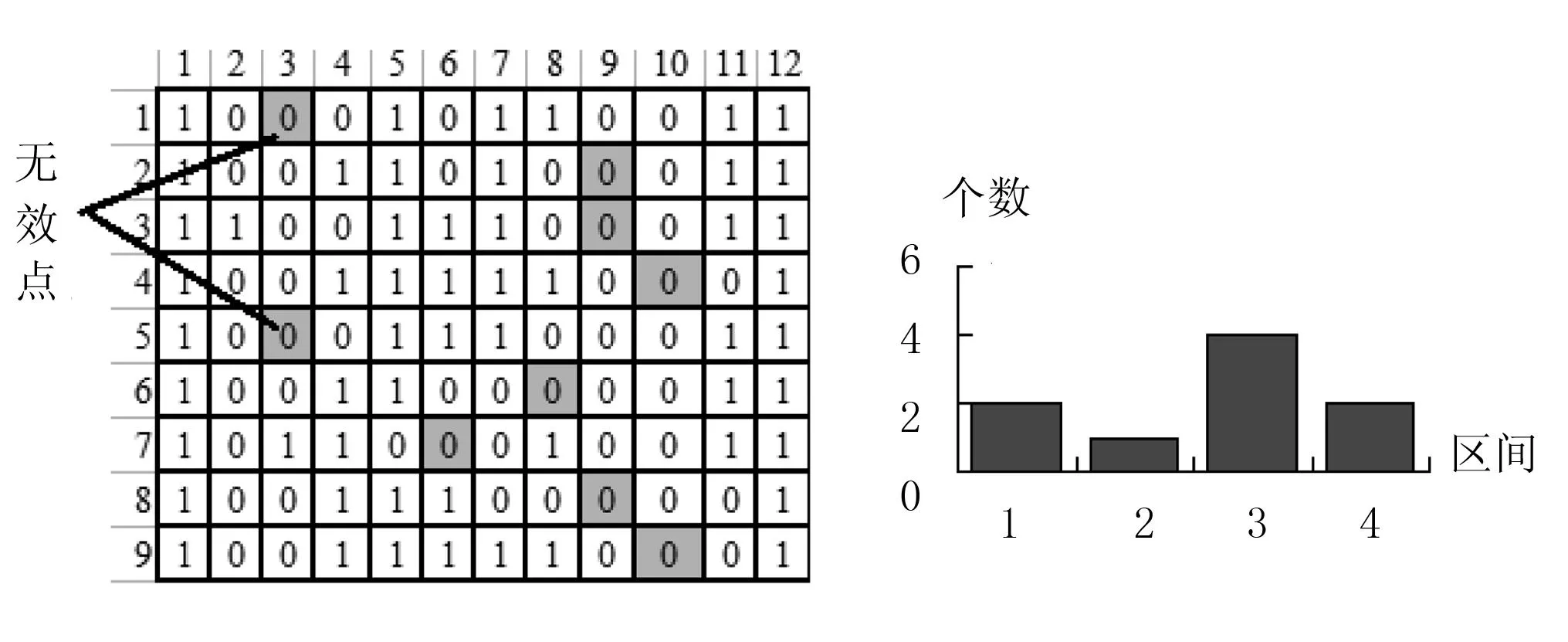
(c) 9×12矩阵 (d) 中心点的分布
图1(a)的矩阵是比较理想的矩阵,而实际情况往往是比较复杂矩阵,图1(c)是用上述方法对比较复杂矩阵处理结果。图1(c)中,很明显有一部分是无效点(如图1(c)中无效点)。无效点是由于其他较宽的路径影响而产生的,如何除去无效点是一个关键问题。本文利用导航路径中心点分布规律,进行筛选去除无效点,具体方法如下:
1)首先把图像的列分为N段,对中心点进行区间划分,找到分布率最高的区间I。
2)由于图像中农作物行不是垂直的,而每个区间范围是有限的,中心点不一定分布在一个区间内。去除无效点的原则是:去掉(I-ΔI,I+ΔI)区间之外的中心点。
利用上述方法对图1(c)的矩阵进行处理,取N=4,分布图见图1(d),中心点分布率最高的是第3个区间。设定ΔI=1,就可以去除无效点。
2.2导航基准线的确定
在一些复杂的农田环境中,中心点很有可能线性度不理想,所以为了得到比较理想的导航基准线,需要先剔除奇异点,再拟合直线。本文首先用改进霍夫变换[16-17]剔除奇异点;然后,用最小二乘法[18-19]拟合导航基准线。具体方法如下:
ρk=xicosθk+yisinθk,
i=1,2,···,n;k=1,2,···,R
(5)
其中,M(xi,yi)T(i=1,2,···,n)为剩余中心点的坐标。
yi=ak·xi+bk
(6)
3)计算中心点到R条直线的距离。计算M中的点到由式(6)确定的R条直线的距离,有

i=1,2,···,n;k=1,2,···,R
(7)
4)删除奇异点。分别求每条直线对应的距离均值和标准差,则有
(8)
i=1,2,···,n;k=1,2,···,R
(9)
利用3×σ原则[1,20]把距均值距离大于3×σ的中心点删掉,得到中心点集M*。
5)以中心点集M*为拟合数据,利用最小二乘法拟合导航基准线。
3实验结果与分析
3.1改进Otsu算法图像分割实验研究
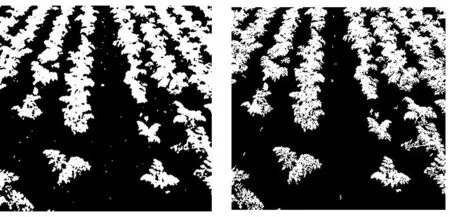
分别采用Otsu算法和改进Otsu算法对胡萝卜图像处理,图2(c)中的噪声点明显比图2(b)中的少,改进Otsu算法处理效果略微优于Otsu算法,所以改进Otsu算法是有效的。
本文中处理的原图像是640×480的彩色图像。所用的计算机配置为CPU主频3.3GHz,内存1.82GB,使用的软件是MATLAB2010b版本。两种方法处理图像的时间如表1所示。
(a) 灰度图像 (b) Otsu算法

(c) 改进Otsu算法

s
表1中,改进Otsu算法耗时约为Otsu算法耗时的1/2,说明缩小寻找最优阈值的范围是有效的,而且也达到减少耗时的目的。
3.2小面积去噪实验研究
对加椒盐噪声和不加噪声的胡萝卜农田图像处理,分别采用中值滤波和小面积方法,由图3(经过局部放大)可知:对加入噪声和不加噪声的图像处理,结果均为小面积法优于中值滤波。该实验说明了中值滤波去除复杂噪声点效果不理想,证明了小面积法滤波的有效性。
(a) 中值滤波 (b) 小面积滤波
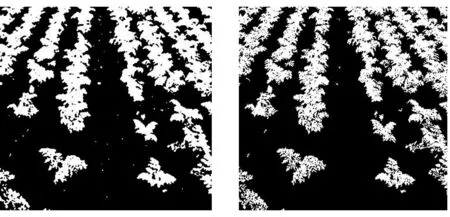
(c) 加椒盐噪声后中值滤波 (d) 加椒盐噪声后小面积滤波
3.3无效点和奇异点对导航基准线的影响实验研究
本实验对预处理后的图像进行基准线的提取。图4(a)中提取的导航基准线明显偏离了路径中心线,这是由于无效点的影响。所以,去除无效点是不可或缺的关键过程。
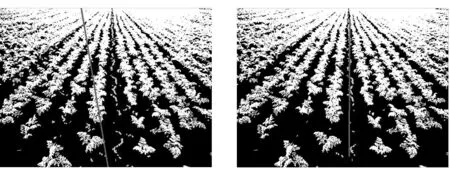
(a) 存在无效点和奇异点 (b) 去除无效点,存在奇异点
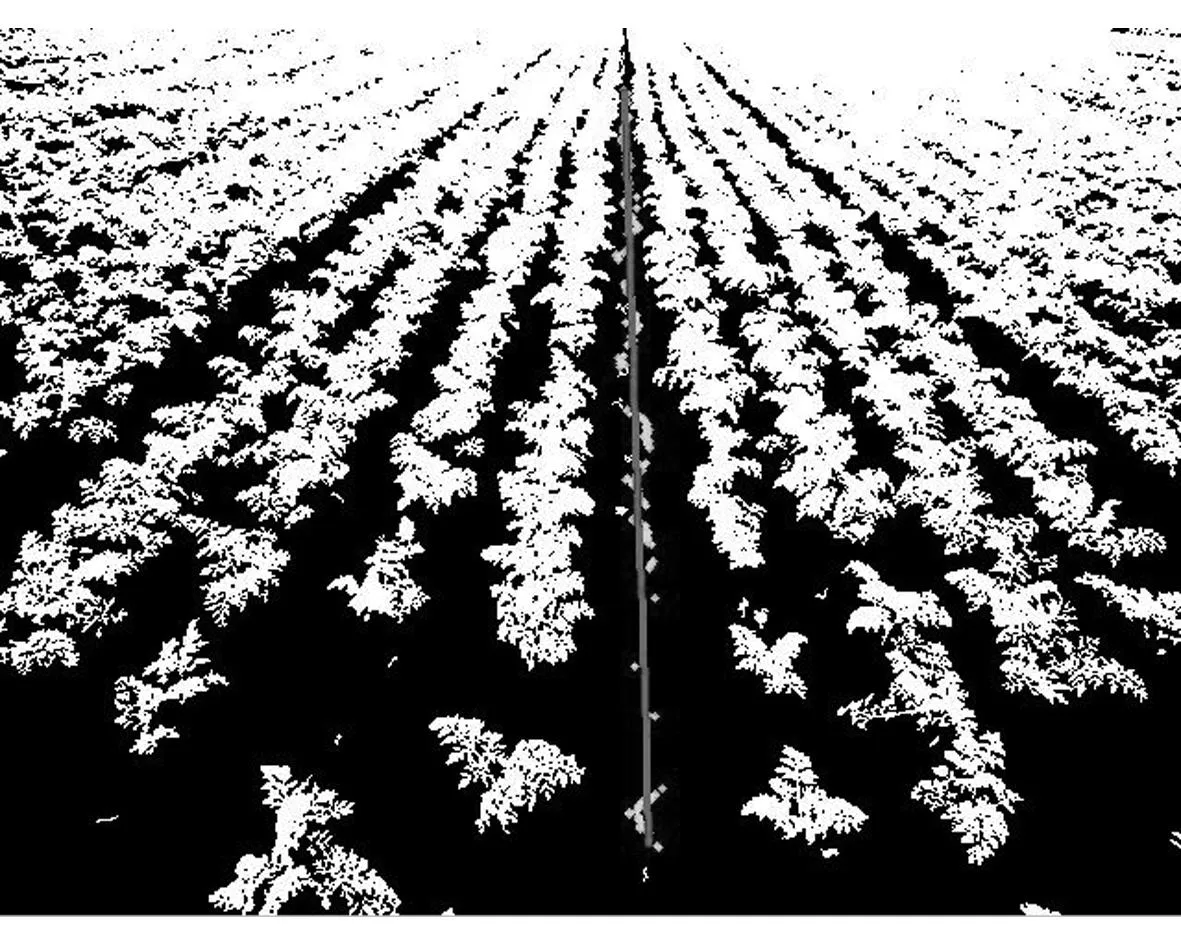
(c) 去除无效点,且剔除奇异点
去除无效点后,直接用最小二乘法拟合直线,拟合直线易受奇异点的影响,而霍夫变换抗干扰能力强,所以先用霍夫变换剔除奇异点;然后用最小二乘法拟合导航基准线。
直接利用最小二乘法拟合得到的导航基准线l1(见图4(b)中直线)方程为
u=181.9538v-62438.7634
(9)
剔除奇异点后再利用最小二乘法拟合到的导航基准线l2(见图4(c)中直线)方程为
u=-31.0704v+10495.5538
(10)
剔除奇异点后中心点数为260个,分别计算这些中心点到l1和l2距离之和,结果为1 407.7和846。由此可以看出:剔除奇异点后拟合的导航基准线精度更高。
3.4本文方法与垂直投影法对比实验研究
分别用本文方法和垂直投影法胡对萝卜农田图像处理,利用垂直投影法提取的导航基准线是图5(b)和图5(d)中直线。由图5可知,通过与垂直投影法提取到导航基准线比较,而本文提出的方法更为有效。
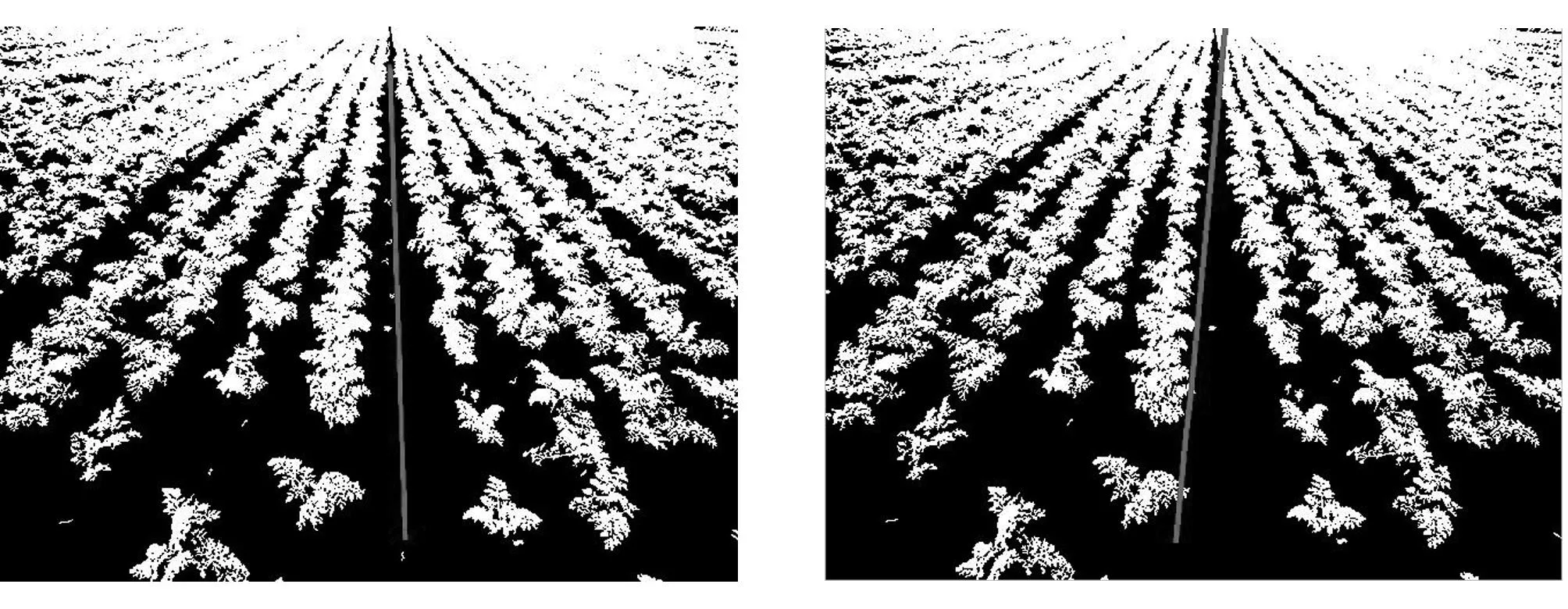
(a) 胡萝卜图像-本文方法 (b) 胡萝卜图像-垂直投影法
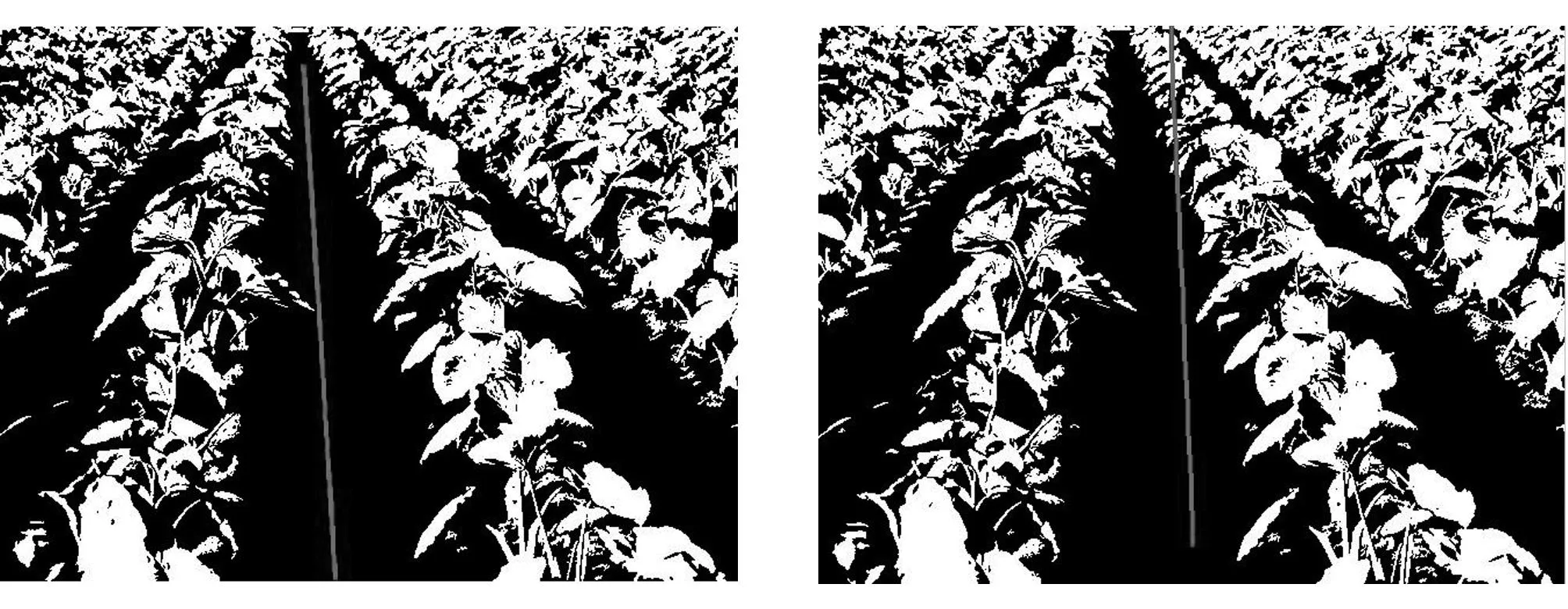
(c) 芋头图像-本文方法 (d) 芋头图像-垂直投影法
表2是对两种算法的实时性测试。可由表2看出:对两幅图像处理,本文算法耗时均比垂直投影法耗时少。所以本文算法符合导航的实时性。
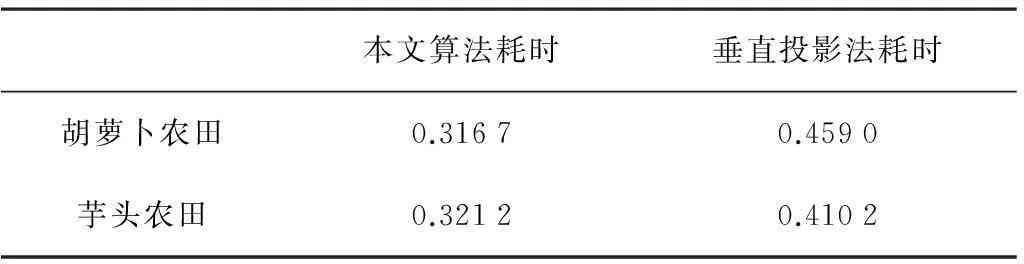
表2 不同农作物基准线生成两种算法的耗时
4结论
通过加权平均法灰度化处理、改进Otsu算法图像分割和小面积法去噪,完成了图像预处理。用列坐标最大差值法识别导航基准中心点,利用中心分布规律去除无效的中心点和使用改进霍夫变换剔除奇异点,最后最小二乘法拟合导航基准线。实验表明:本文研究的方法不受农作物种植疏密程度影响,具有较好的可靠性和实时性。
参考文献:
[1]武军,谢英丽,安丙俭,等.我国精准农业的研究现状与发展对策[J].山东农业科学,2013,45(9):118-121.
[2]王先敏,曾庆化,熊智.视觉导航相关技术的发展及其研究分析[J].信息与控制,2010,39(5):607-613.
[3]李景彬,陈兵旗,刘阳,等.采棉机视觉导航路线图像检测方法[J].农业工程学报,2013,29(11):11-19.
[4]曹倩,王库,杨永辉,等.基于TMS320DM642的农业机器人视觉导航路径检测[J].农业机械学报,2009,40(7):172-175.
[5]司永胜,姜国权,刘刚,等.基于最小二乘法的早期作物行中心线检测方法[J].农业机械学报,2010,41(7):163-167.
[6]徐光磊,葛宝臻.组合数字彩色动感全息图的研究[J].激光与红外,2012,42(7):805-810.
[7]Ohta Y, Kanade T, Sakai T. Color information for region segmentation[J].Computer Graphics and Image Processing, 1980, 13(3): 222-241.
[8]Payne A B, Walsh K B, Subedi P P, et al. Estimation of mango crop yield using image analysis - Segmentation method[J].Computers and Electronics in Agriculture, 2013,91: 57-64.
[9]袁媛,李淼,陈晟,等.复杂背景黄瓜叶部病害图像分割方法[J].农业机械学报,2013,44(10):233-237.
[10]黄丽丽,杨帆,王东强,等.基于改进型最大类间方差法的瞳孔定位方法[J].计算机工程与应用,2013(23):137-140.
[11]张亚秋,吴文福,王刚.基于逐步改变阈值方法的玉米种子图像分割[J].农业工程学报,2011, 27(7): 200-204.
[12]吴德刚,赵利平.一种去除图像混合噪声的滤波算法[J].自动化仪表,2012,33(9):11-13.
[13]李茗萱,张漫,孟庆宽,等.基于扫描滤波的农机具视觉导航基准线快速检测方法[J]. 农业工程学报,2013,29(1):41-47.
[14]李进,陈无畏.基于自适应导航参数的智能车辆视觉导航[J].农业机械学报,2012,43(6):19-24,152.
[15]冯娟,刘刚,司永胜,等.果园视觉导航基准线生成算法[J].农业机械学报,2012,43(7):185-189.
[16]庞广桦,纪寿庆,王阳萍. 基于霍夫变换的全景图中建筑物识别方法[J]. 兰州交通大学学报,2014(6):6-10.
[17]段汝娇,赵伟,黄松岭,等.一种基于改进Hough变换的直线快速检测算法[J].仪器仪表学报,2010,31(12):2774-2780.
[18]王新忠,韩旭,毛罕平,等.基于最小二乘法的温室番茄垄间视觉导航路径检测[J].农业机械学报,2012,43(6):161-166.
[19]郭斯羽,翟文娟,唐求,等.结合Hough变换与改进最小二乘法的直线检测[J].计算机科学,2012,39(4):196-200.
[20]王惠文,李楠.基于全信息的正态分布型数据的线性回归分析[J].北京航空航天大学学报,2012,38(10):1275-1279.
Study on the Method of Visual Navigation Baseline Identification and Extraction of Farmland
Qiao Zhili, Cui Yanping, Zou Xinguang
(College of Mechanical Engineering, Hebei University of Science and Technology, Shijiazhuang 050018, China)
Abstract:In this paper a method is presented to extracts visual navigation baseline based on the image processing of farmland. Firstly, the original image was gray scale processed using the weighted average method(2G-R-B) in this method. And then improved maximize between-class variance was used for gray scale image segmentation. Then the binary image of the division was denoised with small area method. The center points were identified on denoised image, to determine the location of the center navigation.Based on the distribution of the center point, image obtained effective navigation center points after filtering.The navigation baseline was generated by using Hough transform.The proposed method and vertical projection method were used to handle different images of the crops. The conclusion is mentioned method is effective and has the real-time property.
Key words:crops;center points; navigation baseline
文章编号:1003-188X(2016)07-0124-05
中图分类号:S127;TP242.6
文献标识码:A
作者简介:乔智利(1989 -) ,男,河北张家口人,硕士研究生,(E-mail)qzhili2008@163.com。通讯作者:崔彦平(1973 -) ,男,石家庄人,教授,(E-mail)cuiypkd@163.com。
基金项目:河北省科技支撑计划项目(14227202D)
收稿日期:2015-06--07
