基于插秧机运动模型的DGPS野值剔除方法研究
2016-03-23刘晓光刘秀玲王光磊
刘晓光,刘秀玲,王光磊
(1.河北大学 电子信息工程学院,河北 保定 071002;2.河北省数字医疗工程重点实验室,河北 保定 071002)
基于插秧机运动模型的DGPS野值剔除方法研究
刘晓光1,2,刘秀玲1,2,王光磊1,2
(1.河北大学 电子信息工程学院,河北 保定071002;2.河北省数字医疗工程重点实验室,河北 保定071002)
摘要:DGPS定位系统在外界干扰的作用下会导致定位信息中含有野值。这些野值对插秧机的精准控制有很大的影响,必须对DGPS的野值进行处理。为此,提出了一种基于插秧机运动学模型的DGPS野值在线剔除方法。该方法根据插秧机的运动模型设定野值判定阈值,然后采用基于插秧机运动学模型进行推算的估计值对野值进行替换。试验结果表明该方法能够很好地剔除DGPS位置信息中的野值。
关键词:插秧机;GPS;野值;运动模型;精准控制
0引言
GPS定位系统由于能够提供全球性、全天候的三维定位信息,已经在陆地、航空航天和航海探测等领域得到了广泛的应用[1]。伴随精准农业的发展,农业机械的智能化程度越来越高,在发达国家GPS定位系统已经逐步成为农业机械的标准配置。随着智能化农业的发展和逐步推广,田间作业对农业机械的定位精度要求越来越高。在空旷的田间DGPS定位系统能够提供连续的高精度定位信息,但当农机在田间地头作业或者周围有高大建筑物等遮挡时,DGPS输出的信息会受到干扰而出现一些异常的定位信息。这些异常值即DGPS接收机观测信息中的野值。这些野值点不能反映农机业机械的实际位置,如果不剔除这些野值,GPS定位系统的定位误差就会突然增大,从而影响整个农业机械导航控制精度,进而导致不能完成农机的精准作业任务。所以,研究一种DGPS野值在线剔除方法具有实际的意义。
常用的野值剔除算法主要是基于观测数据的残差特性分析,利用残差信号的变化规律对野值进行检测和替换。一些文献中,针对不同的对象提出了基于小波变换和时间序列分析等方法的野值检测方法[2-6]。一些研究人员也提出了基于滤波的自适应野值剔除方法[7-10]。
安利等基于牛顿差值的方法针对飞行参数数据进行了野值处理,仿真试验效果良好[11]。周含冰等利用滤波信息来消除无人机飞行参数中的野值,结果表明该方法具有较强的鲁棒性[12]。朱新岩等基于数据残差特性分析,使用莱特准则对野值进行判断,结果表明该方法在初始阶段检测能力较差,稳定后能够较好地剔除数据中的野值[13]。祝转民等提出了基于Kalman滤波的野值辨识及剔除方法,有效解决了滤波过程的发散问题[14]。葛尧等提出了基于小波变换剔除数据野点的方法,结果表明:采用小波变换去除了随机测量误差与野值点对多普勒频率的影响[15]。
以上方法虽然能够检测野值,但有些算法只对于单个野值的剔除效果很好,不能够很好地处理连续多个野值。而有些算法比较复杂,一般不适合在线野值剔除。为此,本文以插秧机为实际应用对象,提出了基于插秧机运动学模型的DGPS野值在线剔除方法。
1插秧机运动学分析
由于插秧机作业时,一般在平整的农田中行走,海拔高度变化很小,所以可以认为插秧机在田间的运动为二维平面运动。忽略海拔高度变化的影响,选择当地地理坐标系作为参考坐标系,建立载体坐标系X-Y-Z,如图1所示。其中,载体坐标系X轴指向农机的纵轴方向,Y轴指向农机的左侧,Z轴垂直指向农机的正上方,农机可简化为一个矩形块。参考坐标系的X轴指向东,Y轴指向北。
图1中,ax、ay和ω分别为插秧机在载体坐标系下沿X轴、Y轴的加速度和绕Z轴的角速度。由于忽略了海拔高度的变化,所以假设插秧机绕载体坐标系X轴和Y轴转动的角速度都为0,在不考虑地球的自传及哥氏效应的影响下,可得插秧机的运动方程为
(1)

(2)
由以上分析,结合式(1)和式(2)可得插秧机的二维运动模型,有
(3)

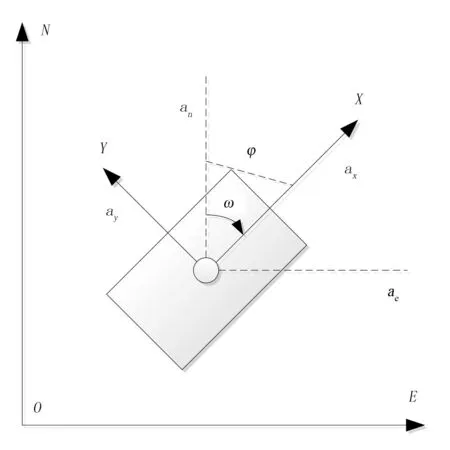
图1 插秧机运动学分析
2基于插秧机运动学模型的野值剔除
根据插秧机的运动学模型可得在单个采样周期T内,插秧机行驶距离的预测增量为
(4)
定义插秧机位置增量的最大预测值max△d为3倍的△D(见式5)。判定DGPS定位信息为野值的准则为:如果当前时刻的位置增量△D超过最大预测值max△d,则判定当前的DGPS定位点是异常值,需要进行野值剔除。对野值点的处理是采用基于插秧机运动学模型进行推算的方法来对当前位置进行估计。采用前一时刻的位置、当前时刻的速度和航向信息递推获得当前时刻位置的估计值来替代野值,则有
maxΔd=3Δd
(5)
(6)
(7)
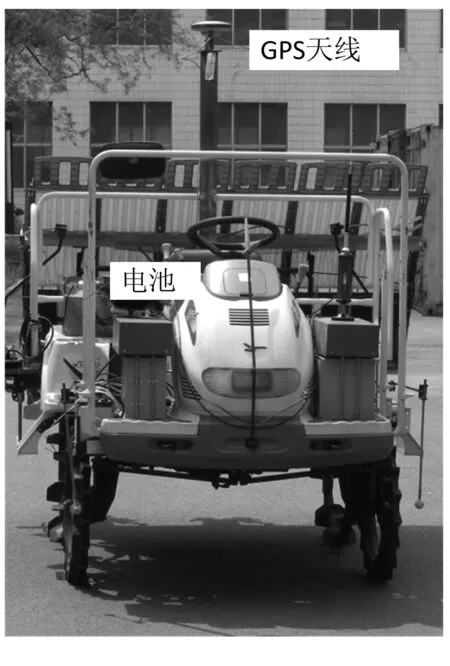
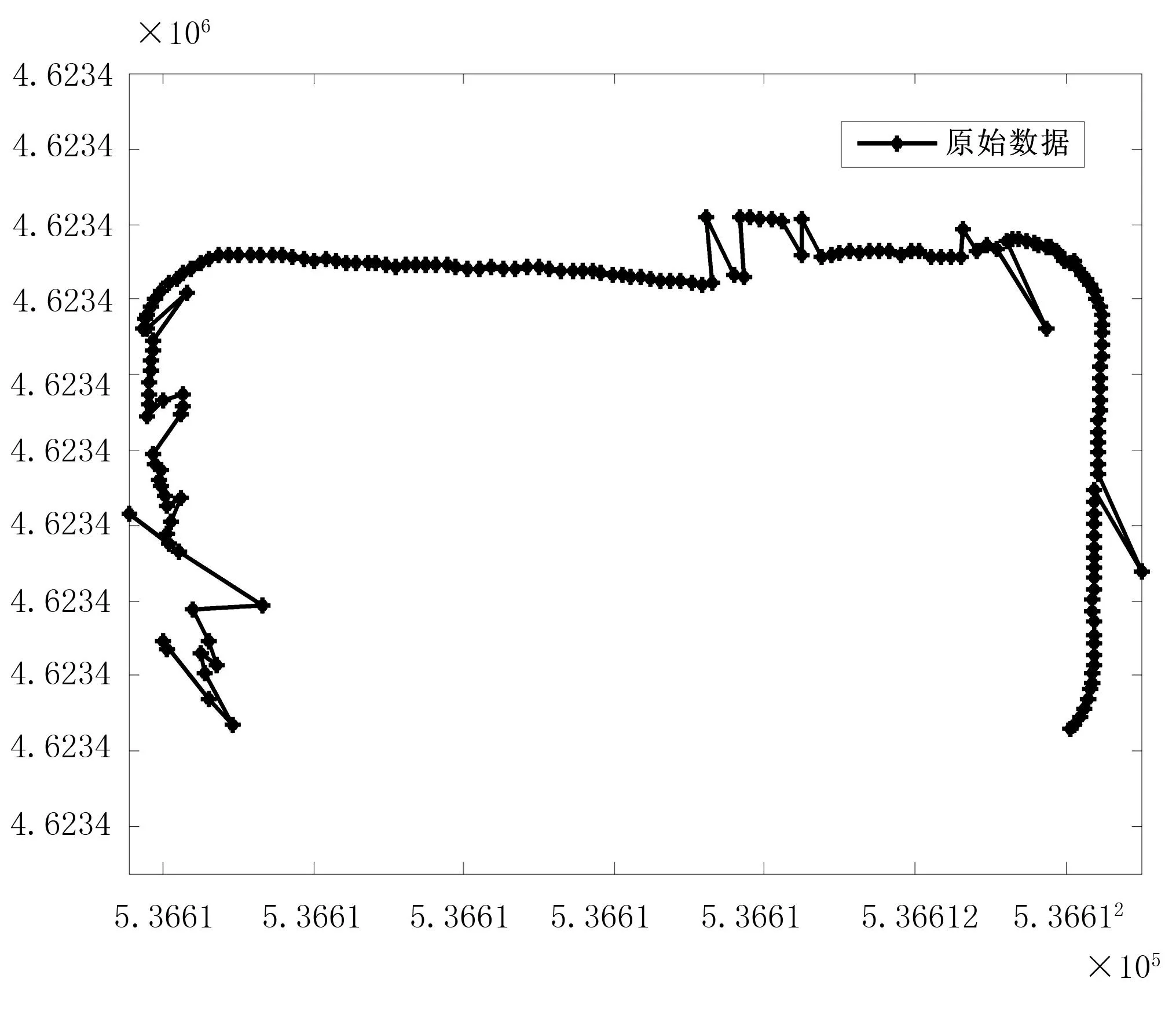
为避免出现无休止的外推而导致整个导航系统偏离插秧机的真实行驶轨迹,必须限制连续剔除野值的个数。经实验表明:当连续剔除野值个数超过10个时,基于插秧机运动学模型递推的估计值与插秧机的实际位置会有较大偏差,已经不能用来估计插秧机的实际位置。一般情况下,设置最大连续剔除野值个数3 3试验验证 3.1数据采集 为了验证所提出的DGPS野值剔除方法的有效性和实用性,人工驾驶插秧机在水泥路面上匀速行驶进行数据采集。图2为本研究采用的洋马插秧机试验平台。其中,GPS接收机安装在插秧机的左侧,右侧安装GPS定位系统的供电电池,GPS天线安装在插秧机的中部。 图2 插秧机试验平台 在试验场地,部分路段有树木遮挡,从而影响了GPS导航系统的定位精度,因此GPS导航系统的输出数据中含有野值数据。为了对比分析,分别针对直线行驶和曲线行驶的进行了数据采集,如图3和图4所示。 图3 直线行驶含有野值数据 图4 直线行驶含有野值数据 3.2试验结果分析 图5 为直线行驶数据采用提出的GPS野值剔除方法处理后,GPS导航系统输出的信息。通过对比可以发现,该方法能够有效地识别出野值并对野值进行处理。由试验结果可以看出:利用GPS野值剔除方法处理后,在受到干扰时GPS导航系统的输出信息得到了明显的改善。 图6是曲线行驶数据利用所提出的方法处理后,GPS导航系统输出曲线数据。通过对比可以发现:该方法不仅对于能够有效地识别出孤立的野值点,也能较好地识别出连续的多个野值点,并对野值进行处理。由试验结果可以看出:该方法对于曲线行驶的情况下的野值,也具有较好的效果。 图5 直线行驶剔除野值后数据 图6 处理后的曲线数据 4结论 本文提出了一种基于插秧机运动模型的DGPS野值在线剔除方法,该方法根据插秧机的运动模型设定野值判定阈值,然后采用线性外推的方法对野值进行替换。试验结果表明:当GPS信号短时间缺失时,在插秧机直线行驶和曲线行驶时,该方法都能够很好地辨识和剔除野值;经过野值剔除后插秧机的导航控制效果得到明显的改善。当卫星信号长时间缺失时,该方法会由于累积误差的逐渐增大而产生较大的定位误差,从而导致剔除野值的效果不是很明显。针对卫星信号长时间缺失情况下,导致定位信息中含有大量野值的情况,还有待于进一步研究。 参考文献: [1]Kaplan. understanding gps principles and applications[M].Artech House Publishers, 2005. [2]桑德一,赵建军,姚刚,等.基于小波变换的着舰引导雷达数据剔野算法[J].现代电子技术,2014(13):26-29. [3]颜东, 张洪钺.基于辨识ARMA模型的野值剔除方法与卡尔曼滤波修正算法[J].信息与控制,1995,24(3):183-188. [4]Fabrizio Angiulli, Basta Stefano, Pizzuti Clara. Distance-Based Detection and Prediction of Outliers[J].IEEE Transactions on Knowledge and Data Engineering,2006,18(2):145-160. [5]Fabrizio Angiulli, Fassetti Fabio. Detecting Distance-Based Outliers in Streams of Data[C]//Proceedings of the sixteenth ACM Conference on information and knowledge management,2007:811-820. [6]Shinsuke Matsumoto, Kamei Yasutaka, Monden Akito, et al. Comparison of Outlier Detection Methods in Fault-Proneness Models[C]//IEEE Proceedings of the Empirical Software Engineering and Measurement, 2007: 461-463. [7]芦琪,张小红.中国境内IGS跟踪站精密单点定位坐标时间序列频谱分析[J].大地测量与地球动力学,2014,34(5):64-69,74. [8]王光鼎,张升康,杨汝良,等.一种基于卡尔曼滤波处理的北斗卫星无源组合导航自适应野值剔除方法[J].电子与信息学报,2008,30(8):1981-1984. [9]朱学锋,韩荣阁,杨若红.基于模糊预测系统的观测数据野值剔除方法[J].系统工程与电子技术,2006, 8(3): 478-482. [10]刘晓光,胡静涛,白晓平,等.插秧机多传感器组合导航方法研究[J].农机化研究,2014,36 (5):24-30. [11]安利,叶雪梅.一种飞参数据的野值剔除和平滑方法研究[J].现代电子技术,2012,35(18):102-104,107. [12]周含冰,陈冬冬,彭燕,等.抗野值Kalman滤波在靶场测量数据处理中的应用[J].舰船电子对抗,2013,36(5):84-87. [13]朱新岩,史忠科.基于残差特性分析的野值检测与剔除方法[J].飞行力学,2008,26(6):79-83. [14]祝转民,秋宏兴,李济生,等.动态测量数据野值的辨识与剔除[J].系统工程与电子技术,2004,26(2):147-149. [15]葛尧,孟庆慈,安玉华,等.基于小波变换剔除数据野点的方法[J].飞行器测控学报,2006,25(3):64-67. Research on DGPS Outliers Eliminating Method Based on the Movement Model of Transplanter Liu Xiaoguang1,2, Liu Xiuling1,2,Wang Guanglei1,2 (1.College of Electronic and Information Engineering,Hebei University, Baoding 071002,China; 2.Key Laboratory of Digital Medical Engineering of Hebei Province, Baoding 071002,China) Abstract:The locating information of DGPS contains outliers in the disturbed environment.These outliers that must be treated,has a great influence on the control precision of transplanter.The thesis proposed a method to treat the ouliers online based on the kinematics model of transplanter.The method get the outliers threshold by the movement model of transplanter. And then the outliers is replaced by the estimated value. The experimental results show that the method can eliminate the outliers better in DGPS location information. Key words:transplanter; GPS; outliers; kinematics model; precision control 文章编号:1003-188X(2016)07-0120-04 中图分类号:S223.9;S24 文献标识码:A 作者简介:刘晓光(1983-),男,河北保定人,讲师,(E-mail)lxg_hbu@163.com。通讯作者:刘秀玲(1977-),女,河北沧州人,教授,硕士生导师,(E-mail)liuxiuling121@hotmail.com。 基金项目:保定市科技局项目(15ZG010);河北省教育厅项目(QN2015071) 收稿日期:2015-06-29