基于聚类算法对象提取的快速定位采摘机器人设计
2016-03-23张微微白向伟汪小志
王 政,张微微,张 宾,白向伟,汪小志
(1.河北工程技术学院,石家庄 050091;2.武汉理工大学,武汉 430070)
基于聚类算法对象提取的快速定位采摘机器人设计
王政1,张微微1,张宾1,白向伟1,汪小志2
(1.河北工程技术学院,石家庄050091;2.武汉理工大学,武汉430070)
摘要:为了提高采摘机器人的定位速度,对机器人的机器视觉系统进行了改进,设计了一种基于聚类算法和视频对象提取技术的快速定位机器人。该机器人视频对象图像提取过程中,在完成图像进行滤波后,引入了Lab彩色空间聚类算法,有效地降低了图像的色彩数和噪声,实现了图像对象的量化处理,大大提高了果实定位和采摘的效率。为了验证设计的快速定位采摘机器人的可靠性,对机器人的采摘性能进行了测试,测试项目主要包括图像处理和果实定位。通过测试发现:快速定位机器人可以有效地实现图像聚类中心的提取,并对聚类中心进行编码,每次定位用时少、定位速度高且果实采摘的准确性累计概率较高,符合高精度、高效率果实采摘机器人的设计需求。
关键词:采摘机器人;视频对象;聚类算法;定位速度;机器视觉
0引言
机器人视觉技术是近年研究最热门的课题之一,为了提高采摘机器人的果实识别性能,越来越多的采摘机器人开始采用双目视觉系统对果实进行定位。机器人双目视觉系统人眼观察物体的方式很相似,利用两台相隔一定距离的两台摄像机所获取的图像的差异,运用三角测距原理得到果实的有关位置的三维信息,这就是所谓的双目视觉系统。但是,由于双目视觉系统得到的视频数据较大,如果单纯对果实视频图像进行提取,得到的果实彩色图像数据量较大,并且包含噪声也比较多,不利于果实信息的提取。基于此,需要通过处理算法对图像进行量化,提高图像的处理速度,从而提高机器人对果实的定位速度。
1总体设计
视频对象提取快速定位果实采摘机器人的数据主要包括机器视觉系统、机械手执行末端、手腕等关键和行走机构。其中,机器视觉系统主要由彩色摄像头和图像处理卡组成,可以识别成熟的果实;机械手执行末端主要是使用胶手指和气动吸嘴,腕关节可以把果实摘取而不损伤果实;行走机构可以保证机器人在田间自由行走,其总体设计如图1所示。
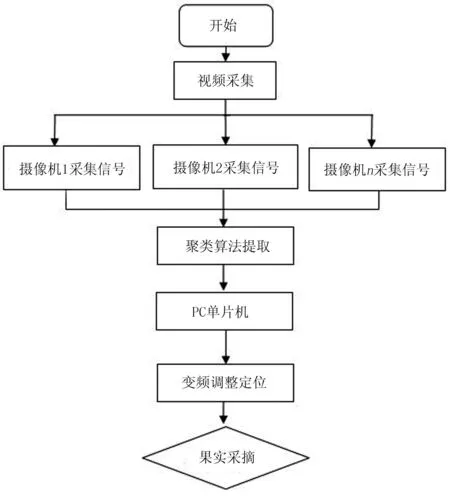
图1 视频对象提取定位机器人总体设计
设计原理:使用视频采集技术采集果实的视频,然后利用聚类算法对视频图像进行色彩聚类,得到果实的质心位置,并建立一个位置识别数据库;最后对各个位置参考点发出动作指令,使用PC机对执行末端进行变频调速。其中,位置识别数据库的建立流程如图2所示。
在机器人进行定位时,利用RSSI定位技术对果实的位置进行预测,将得到的位置矢量和数据库中的位置进行比较,从而得到最佳的匹配结果。

图2 位置识别数据库的创建流程
2结构和控制算法设计
为了实现果实采摘机器人的快速定位,需要对果实采摘机器人的视觉系统进行改进,将2个摄像头安装于末端执行器上,组成定位系统,机器视觉系统如图3所示。
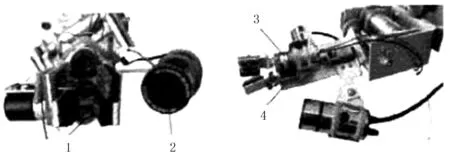
1.摄像头 A 2.摄像头B 3.激光发生器 4.机械爪
机器视觉系统的改进在于使用一种视频对象处理方法,可以实时地实现视频对象的提取,高效地完成果实的定位。其中,摄像头A安置在机械手的正下方,摄像头B安置在机械手的侧端,两个摄像头使用CMOS摄像头;其分辨率为1 024×680,可以拍摄视频的范围为1 760mm×1 320mm。图4为机器人的定位过程示意图。

1.机械爪 2.垄面 3.草莓果实 4.果柄 5.爪钳
其以作业面向垄面建立笛卡尔坐标系,垄面向右方为X轴正方向,垄面的下方为Y轴正方向,垄面的垂直方向为Z轴正方向;在Z方向上,目标与爪钳根部的坐标差值,即为末端执行器与目标的距离D。机器人定位过程中,首先利用双摄像头获得果实视频信息,然后从视频中提取果实对象图像,从而确定其在平面内的位置和姿态,并利用图像信息调整机器人的位置和姿态,使机器人接近果实;然后利用不断的定位过程对果实进行追踪,从而完成果实的采摘。机器人的位置和姿态控制主要有两种方案,一是利用正运动学,二是逆运动学。对于果实目标的锁定,需要根据双摄像头得到的视频来提取果实对象,在提取果实对象前需要对视频进行处理,得到降低图像的色彩数便于提取。目前,色彩控制主要使用的是RGB、HSL、YUV和Lab,与人眼视觉特征比较匹配的是Lab色彩空间。其中,L表示色彩的亮度,其取值范围为[0,100];a表示色彩的红绿程度,其取值范围为[-128,127];b表示色彩的黄蓝程度,其取值范围为[-128,127];Lab空间是基于XYZ空间的,从XYZ空间到Lab空间的变换为

(1)
(2)

(3)
当ΔS>5时,颜色间是存在区别的。对图像进行滤波后,可以利用聚类算法对色彩进行聚类,其中质心的表达式可以表示为
ci=∑x(n)/∑1,x(n)∈Ci
(4)
其中,x(n)表示像素点,失真度的表达式为
Di=∑‖x(n)-ci‖2,x(n)∈Ci
(5)
根据Fisher判断准则,对于每个点x0(n)都可以得到的m(n)值,假设
Tn=dm(n)-1
(6)
每个像素点的权重可以表示为
vn=exp(-T(n))
(7)
则质心的表达式可以改进为
ci=∑v(n)x(n)/∑v(n),x(n)∈Ci
(8)
将失真度也引入权重的概念,表达式改为
Di=∑v(n)‖x(n)-ci‖2,x(n)∈Ci
(9)
根据质心位置可以对果实图像进行定位,机器人可以通过位置和姿态的调整来实现机器人作业轨迹和图像轨迹的重合。为了实现位置和姿态调整,将输出力矩、输出精度、规格重量、供电电压、等各方面规格进行综合考虑,选用了松下公司的交流伺服电机,如图5所示。

图5 交流伺服电机
图5中,主要考虑的参数包括电池容量、输出功率和转矩、最大转矩、额定和最大电流以及最高转速,其参数的具体选择如表1所示。
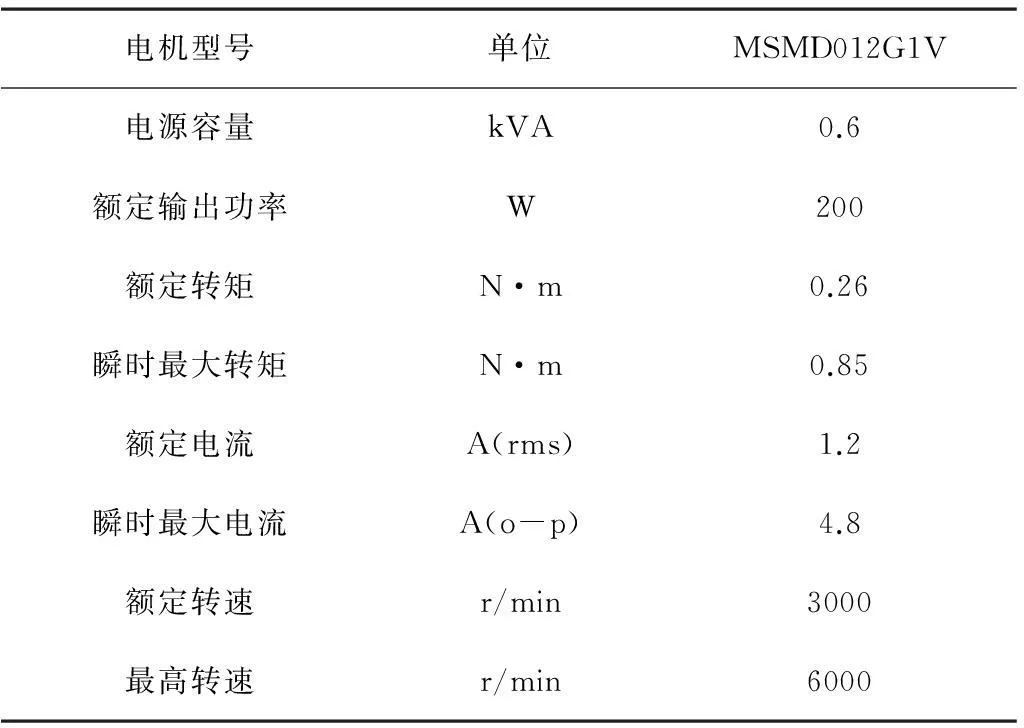
表1 伺服电机性能参数表
为了满足定位执行末端伺服电机的需要,通过计算对伺服电机的性能参数进行了设计,变速箱的设计如图6所示。
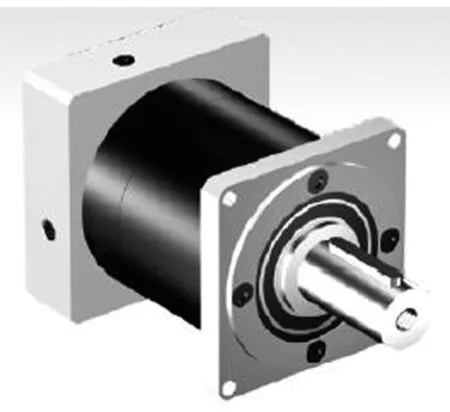
图6 减速箱设计示意图
伺服电机在工作时,需要实现低转速大力矩的输出,因此减速箱的设计也需要配合这一力学性能,根据机器人结构和力学性能进行综合考虑,选择了HMK型减速箱。
3果实采摘机器人测试
为了验证设计的视频对象提取快速定位机器人的有效性和可靠性,对机器人的性能进行了测试,测试项目包括图像处理和果实定位。机器人果实采摘测试的场景如图7所示。

图7 机器人测试场景图
在机器人上装有机器视觉系统,在头部安装有高清摄像头,在机身部位安装了图像处理系统,可以有效地实现聚类算法的视频对象提取。通过对象提取和聚类中心计算,得到了如图8所示的果实定位图像。
对苹果图像进行编码,利用不同的编码可以实现果实的自动轨迹跟踪。为了验证聚类算法的优越性,对不使用聚类算法和使用聚类算法的RSSI定位进行测试,得到了如图9所示的结果对比曲线。
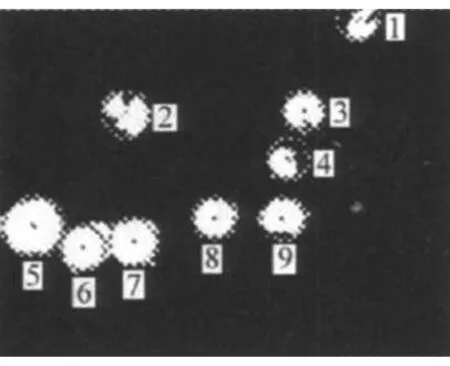
图8 果实提取图像聚类中心编码结果图

图9 聚类算法机器人作业精度随作业时间变化曲线
由图9可以看出:随着作业时间的增加,定位追踪轨迹逐渐和图像轨迹靠拢,定位精度逐渐增加,而聚类算法的定位精度要明显比不使用聚类算法的好。
表2表示使用聚类算法和不使用聚类算法机器人每次定位用时结果对比曲线。由表2可以看出:使用聚类算法后,机器人定位的时间明显缩短,从而提高了机器人的作业效率。

表2 每次定位时间比较
4结论
1)依据聚类算法和视频提取技术,对果实采摘机器人的视觉系统进行了改进,并在视频对象提取过程中引入了Lab色彩空间的聚类算法,在图像滤波后可以有效地计算果实质心的位置,完成果实的定位,提高了机器人的定位速度和定位精度。
2)对采摘机器人的图像处理性能和果实采摘性能分别进行了测试。通过测试发现:利用聚类算法可以有效地提取果实的聚类中心,可以完成聚类中心的编码。使用聚类算法后,果实的定位时间有了较大幅度的缩短,果实采摘的作业精度较高,从而验证了聚类算法在果实视频对象提取中的可靠性,为采摘机器人实现快速果实定位的研究提供了较有价值的参考。
参考文献:
[1]司永胜,乔军,刘刚,等.基于机器视觉的苹果识别和形状特征提取[J].农业机械学报,2009,40(8):161-165.
[2]周俊,刘锐,张高阳.基于立体视觉的水果采摘机器人系统设计[J].农业机械学报,2010,41(6):158-162.
[3]李理,殷国富,刘柯岐.田间果蔬采摘机器人视觉传感器设计与试验[J].农业机械学报,2010,41(5): 152- 157.
[4]张凯良,杨丽,张铁中.草莓采摘位置机器视觉与激光辅助定位方法[J].农业机械学报,2010,41(4):151- 156.
[5]蔡健荣,周小军,王锋,等.柑橘采摘机器人障碍物识别技术[J].农业机械学报,2009,40(11):171-175.
[6]马如奇,郝双晖,郑伟峰,等.基于 MATLAB 与 ADAMS 的机械臂联合仿真研究[J]. 机械设计与制造,2010(4):93-95.
[7]谷鸣宇,秦荣荣,杨达意. 机械手动力学的 ADAMS 与 MATLAB 联合仿真研究方法[J]. 机械设计,2008(6): 227-228.
[8]钟灶生, 薛方正, 敬成林.分布式电源在仿人机器人控制系统中的应用[J].传感器与微系统,2011,30(2): 139-143.
[9]姬国钊, 张世伟, 王奇斌, 等. 真空吸盘式爬壁清洗机器人的研究与开发[J]. 机械研究与应用, 2009, 22(4): 5-8.
[10]袁夫彩, 陆念力, 曲秀全. 水下船体清刷机器人磁吸附机构的设计与研究[J]. 中国机械工程, 2008, 19(4): 388-391.
[11]王宇, 范钦钰, 赵亚东, 等. 基于仿生学的四足行走机构[J]. 电子设计工程, 2011,19(17): 27-30.
[12]阮鹏, 俞志伟, 张昊, 等. 基于ADAMS的仿壁虎机器人步态规划及仿真[J]. 机器人,2010, 32(4): 499-504.
[13]俞志伟, 李宏凯, 张晓峰, 等. 仿壁虎脚趾结构设计及粘附运动性能测试[J]. 机械工程学报, 2011, 47(21): 7-13.
[14]王洪光, 姜勇, 房立金, 等. 双足爬壁机器人壁面凹过渡步态规划研究[J]. 智能系统学报, 2007, 2(4): 40-45.
[15]薛胜雄, 任启乐, 陈正文, 等. 磁隙式爬壁机器人的研制[J]. 机械工程学报, 2011,47(21): 37-42.
[16]李志海, 付宜利, 王树国. 四轮驱动滑动吸盘爬壁机器人的动力学研究[J]. 机器人,2010, 32 (5): 601-607.
[17]蒋焕煜,彭永石,申川,等. 基于双目立体视觉技术的成熟番茄识别与定位[J] .农业工程学报,2008, 24(8):279-283.
[18]蔡健荣,李玉良,范军,等. 成熟柑橘的图像识别及空间定位研究[J].微计算机信息.2007, 23(12-1): 224-225, 314.
[19]司永胜,乔军,刘刚,等.基于机器视觉的苹果识别和形状特征提取[J] .农业机械学报,2009, 40(8):208-213.
[20]吴修文,冯晓霞,孙康岭,等.农用机器人导航电子地图的研究[J]. 农业装备与车辆工程,2010(3):40-42.
[21]谢志勇,张铁中.基于 RGB 彩色模型的草莓图像色调分割算法[J].中国农业大学学报,2006,1l(1): 84-86.
[22]祖迪,韩建达,谈大龙.动态多障碍物环境下目标追踪的路径规划方法[J].高技术通讯,2006,12(2):136- 142.
[23]赵鹏,赵德安.双目立体视觉在果树采摘机器人中的应用[J].农机化研究,2009,31(1):212-214.
[24]彭熙伟,陈建萍.液压技术的发展动向[J].液压与气动, 2007(3):1-4.
[25]黄兴.液压传动技术发展动态[J].装备制造技术,2006 (1):36-39.
[26]曹玉宝.液压传动技术在联合收割机中的应用拖拉机与农用运输车,2008(4):4-5.
Design for Fast Locating and Picking Robot Based on Clustering Algorithm and Object Extraction
Wang Zheng1, Zhang Weiwei1, Zhang Bin1, Bai Xiangwei1, Wang Xiaozhi2
(1.Hebei Polytechnic Institute,Shijiazhuang 050091, China; 2.Wuhan University of Technology,Wuhan 430070,China)
Abstract:In order to improve the picking robot localization speed, machine vision system of the robot was improved to design a clustering algorithm and a video object extraction technique based on the rapid positioning robot.After the completion of image filtering,the robot image video object extraction process was introduced into the lab color space, and it used clustering algorithm to reduce the image color and noise, which can realize the quantification of object image processing, thereby greatly improved fruit location and picking efficiency. In order to verify the reliability of the design of the fast positioning picking robot, the robot's picking performance is tested,which included image processing and fruit location. It was found by test that the rapid positioning robot can effectively realize the extraction of image clustering center, and code of the cluster center, fewer in each location, high positioning speed, fruit picking accuracy of cumulative probability is higher,which meet the design requirements of the precision and high efficiency fruit picking machine.
Key words:picking robot; video object; clustering algorithm; locating speed; machine vision
文章编号:1003-188X(2016)07-0045-05
中图分类号:S225.93;TP242
文献标识码:A
作者简介:王政(1982-), 男,河北辛集人,讲师。通讯作者:汪小志(1981-),女,武汉人,副教授,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFC1079);湖北省自然科学基金计划面上项目(2013CFB418)
收稿日期:2015-07-12
