一种高精度自主导航定位的葡萄采摘机器人设计
2016-03-23郭素娜刘志刚
郭素娜,张 丽,刘志刚
(1.河南工业职业技术学院,河南 南阳 473000;2.南昌大学,南昌 330031 )
一种高精度自主导航定位的葡萄采摘机器人设计
郭素娜1,张丽1,刘志刚2
(1.河南工业职业技术学院,河南 南阳473000;2.南昌大学,南昌330031 )
摘要:为了提高葡萄采摘机器人自主导航能力,增强对葡萄成熟度的准确识别功能,降低漏采率和误采率,设计了一种新式的基于RSSI自主导航和颜色特征提取的葡萄采摘机器人。该机器人使用RSSI定位技术,首先对装有无线传感器的葡萄树进行定位,然后利用机器视觉系统对葡萄的成熟度进行判断,并对满足采摘条件的葡萄使用机械手进行采摘。对葡萄采摘机器人的性能进行了测试,通过测试发现:机器人对装有传感器的葡萄树的准确识别率达到了95%以上,对葡萄成熟度的判断达到了98%以上,是一种相对高效的葡萄采摘机器人。
关键词:葡萄采摘;自主导航;颜色识别;漏采率;机器人
0引言
最早的机械采摘方法是采用机械振摇式和气动振摇式,随着科学技术的发展,农业机器人在国内外迅速发展起来。自从20世纪60年代美国人Schertz和Brown提出用机器人采摘果实之后,对采摘机器人的研究受到广泛重视。我国农业机器人的研究起步比较晚,但正在不断的发展。其中,包括中国农业大学的草莓采摘机器人研究、东北林业大学林木球果采摘机器人研究及上海交通大学的黄瓜机器人研究等。本文对葡萄采摘机器人进行了改进,以期得到较低漏采和误采率的机器人。
1葡萄采摘自主导航定位机器人总体设计
果蔬采摘机器人的自动导航和识别功能都依赖于视觉系统。机器视觉就是给机器人装上视觉传感器,模拟人的视觉功能,从图像或图像序列中提取信息,对葡萄树和葡萄进行定位和识别,使机器人完成葡萄采摘任务。视觉传感器主要由彩色摄像机来寻找和识别成熟的葡萄,通过颜色特征的提取,得到成熟葡萄的信息;然后利用RSSI定位导航功能,对葡萄完成采摘。其基本框架如图1所示。
葡萄自主导航机器人使用RSSI定位技术对葡萄树进行定位,使用特征提取方法对葡萄的成熟度进行判断。其具体采摘过程为使用RSSI定位技术首先对装有无线传感器的葡萄树进行定位,然后利用机器视觉系统对葡萄的成熟度进行判断。如果满足采摘条件,则通过机械手对葡萄进行采摘;如果不满足采摘条件,则继续对葡萄进行定位。
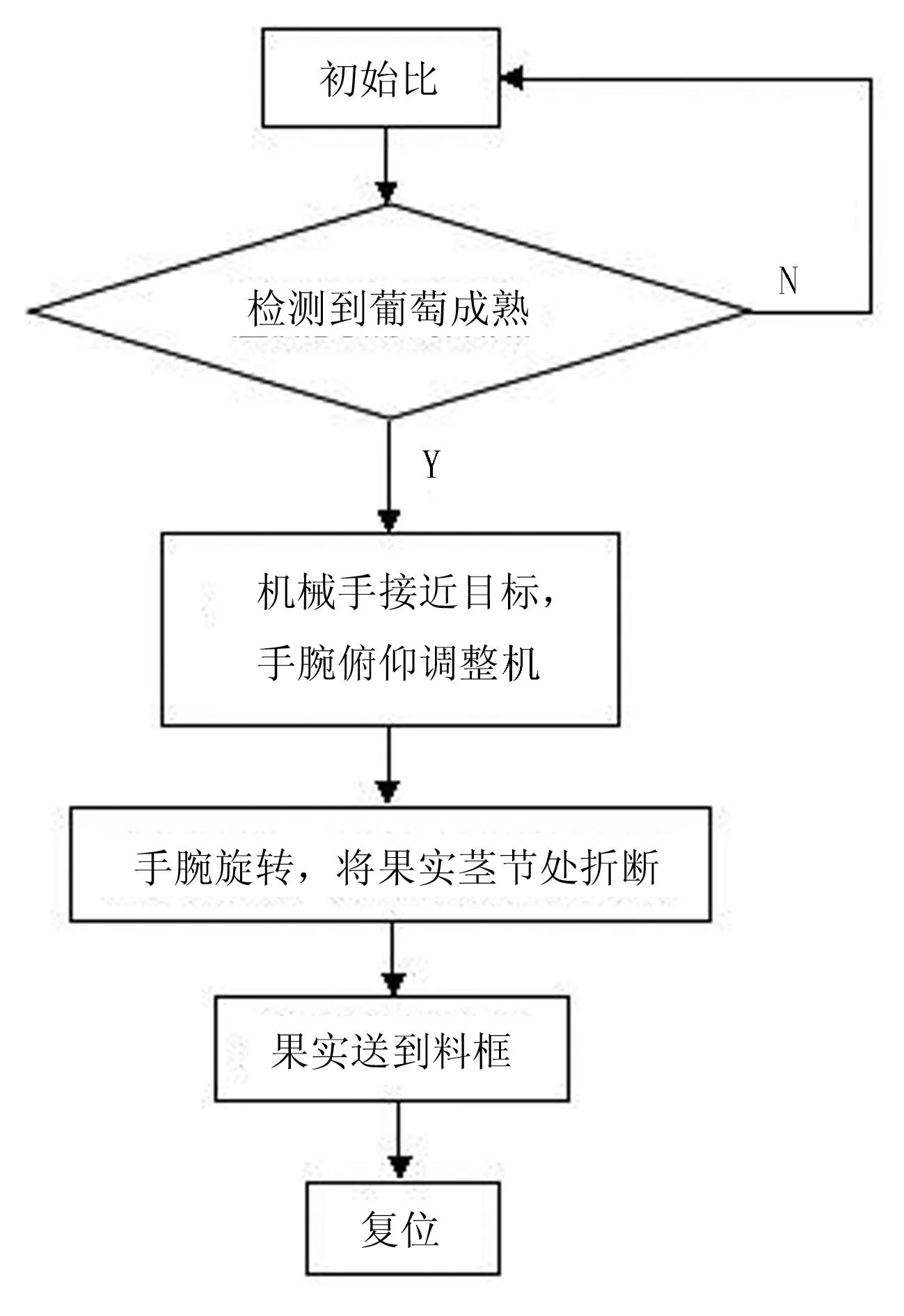
图1 葡萄自主导航采摘机器人总体设计框架
2采摘机器人结构和定位功能设计
2.1结构设计
2.1.1机械臂基本结构
对于葡萄采摘机器人的设计需要综合考虑采摘空间、冗余空间和姿态空间等因素,通过综合考虑使用5 旋转自由度和1移动的方案。其主要部分包括躯干、手臂、腰部、腕部及小臂等,其结构如图2所示。

图2 机器人基本结构示意图
2.1.2运动控制系统
目前,采用PC作为主控器的运动控制方式,其控制方式主要有两种:一是使用PC控制卡对电机进行控制;二是采用CAN总线对运动进行控制。基于经济性考虑,本文选自使用第2种控制方案,其结构框架如图3所示。
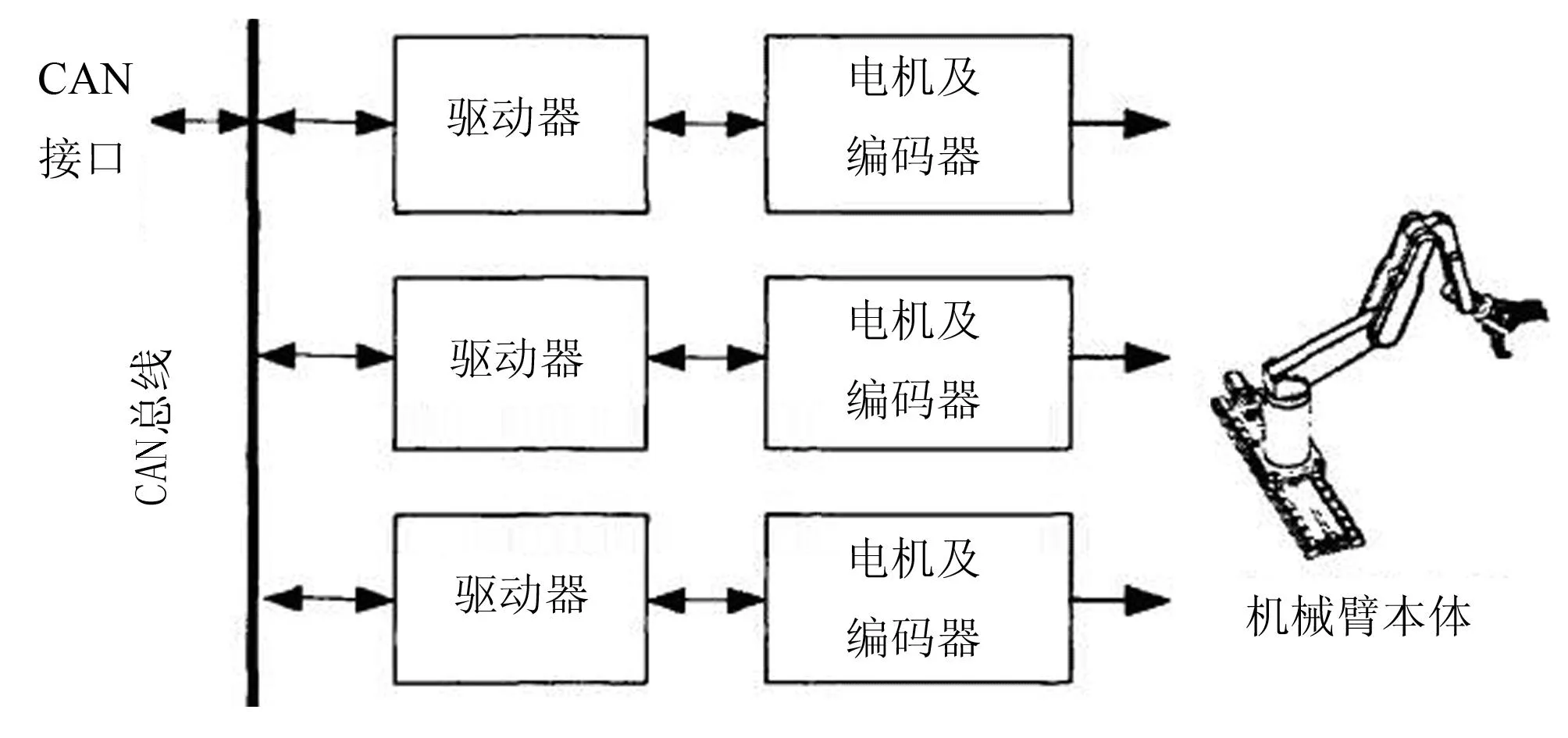
图3 伺服电机运动控制系统控制示意图
图3中,硬件组成包括通用PC机或工控机,基于PCI总线的高性能的ZLG-PCI5 110 Aceelnet Micro Micro Module CAN卡、Copley Panel和Copley StepNet伺服驱动器。
2.1.3末端执行器
葡萄采摘机械在进行作业时,其末端执行机构的动作是模拟人的动作设计的,其主要动作是抓取果实,完成果实与梗的剥离(见图4),需要使机器人的腕部绕j轴旋转和绕i轴回转实现。
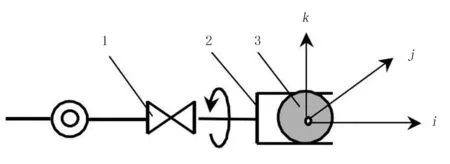
1.机械手末端关节 2.末端执行器 3.采摘目标
机器人执行末端可以采用柔软的复合材料作为末端执行器的材料,为了使机器人准确定位及执行末端能够准确地识别葡萄的成熟度,需要使用相关定位和图像处理方法实现定位和识别功能。
2.2定位功能设计
机器人大部分采用无线传感网络来定位,在实际作业环境中会存在较多的障碍物,因此在实际信号传播过程中,信号会产生一定的损耗。其中信号传输的基本模型为
(1)
其中,PL(d)表示经过距离d后的路径损耗;PL(d0)表示经过单位距离后的路径损耗;d0为单位距离;X0服从高斯分布,其均值为1;n表示信号衰减因子。则接收端的信号强度可以表示为
(2)
RSSI=
(3)
考虑经济成本等因素,该模型可以进一步简化为
RSSI=-10nlgd-A
(4)

(5)
将每个方程分别减去最后一个方程可得
(6)
其线性表达式可以写成
Az=b
(7)
其中

由于测量过程中存在误差N,利用最小二乘法原理可得
Q(z)=‖b-Az‖2
(8)
对z求导得

(9)
如果AAT非奇异,则
z=(ATA)-1ATb
(10)
则可求出用户坐标(x,y)。机器人的定位流程如图5所示。

图5 运动定位流程图
机器人运动系统定位的主要过程包括参考点的设置、计算机处理及得到位置坐标等。当读取坐标后,信号被以电信号的方式传送到运动系统,通过路径规划,完成定位。
3自主导航葡萄采摘机器人采摘过程测试
为了验证本文设计的葡萄采摘机器人的自主定位导航功能,在葡萄田园对采摘机器人进行了测试。测试项目主要包括葡萄树的节点定位和葡萄成熟度的识别,测试机器人如图6所示。

图6 葡萄采摘机器人测试示意图
假设测试节点个数为50个,即有50颗葡萄树,其中包括39个已知节点和11个未知节点,坐标系是60m×60m,节点通信半径为120m。通过计算,得到了如图7所示的节点邻里关系图。
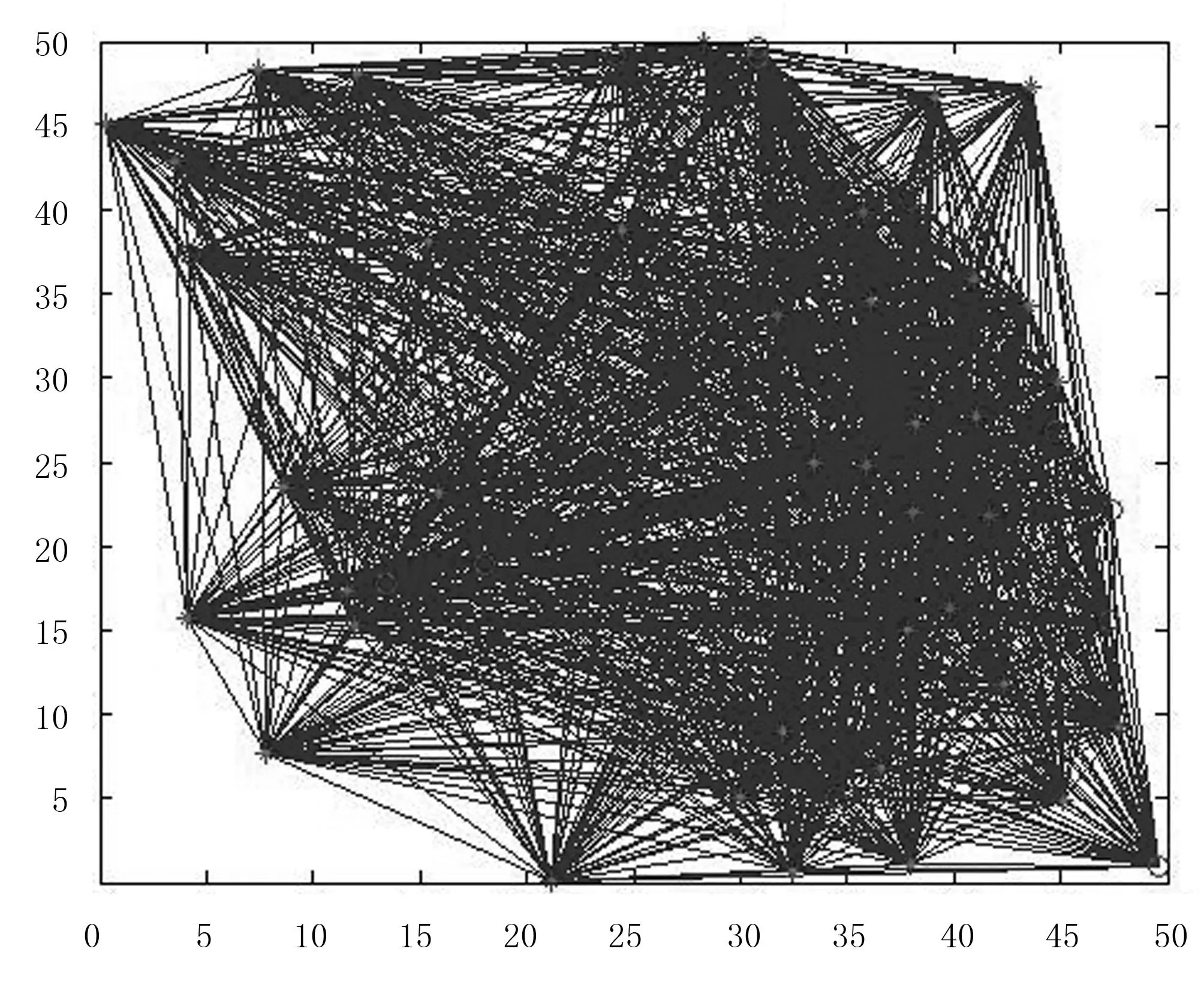
图7 节点邻居关系图
根据RSSI定位原理,可以测试未知节点,为了有效地表示位置节点,使用圆圈对位置节点进行标记,用星形表示已知节点,如图8所示。其中,圆圈部分表示待摘葡萄穗的葡萄树。通过RSSI定位功能,对圆圈进行定位,最后通过计算得到了如图9所示的定位误差曲线。
由图9可以看出:随着时间的变化,定位误差的峰值比较平稳,最大定位误差不超过15cm,定位精度较高;普通树定位完成后需要对葡萄成熟度进行识别。
图10表示主要颜色特征提取的灰度直方图结果。机器人的逻辑判断模块可以根据灰度值对葡萄的成熟度进行判断,当满足采摘的颜色阈值时,便对葡萄进行采摘。通过多次测试,得到了如表1所示的测试采摘结果。

图8 节点定位结果图
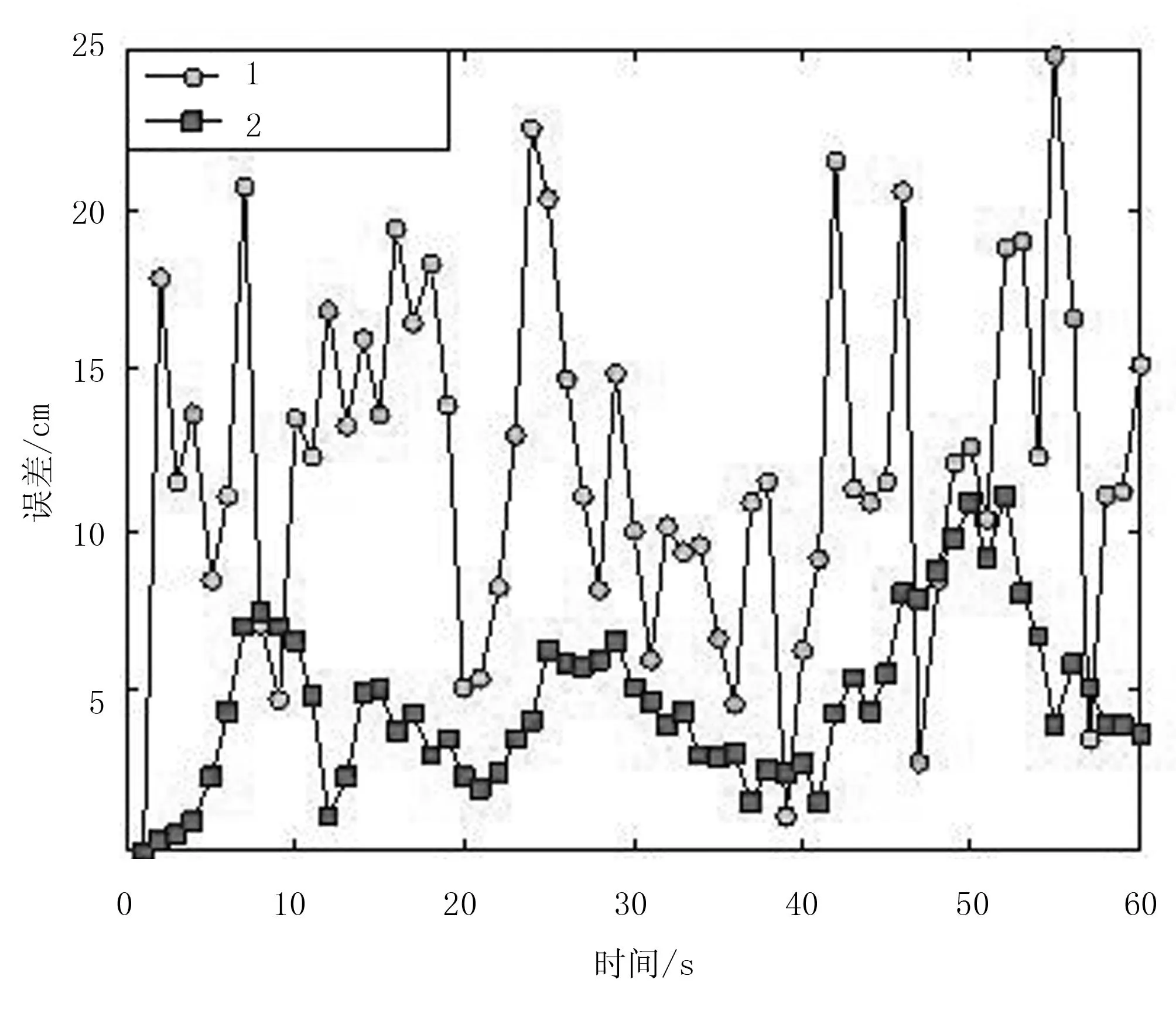
图9 距离定位误差

图10 颜色特征提取
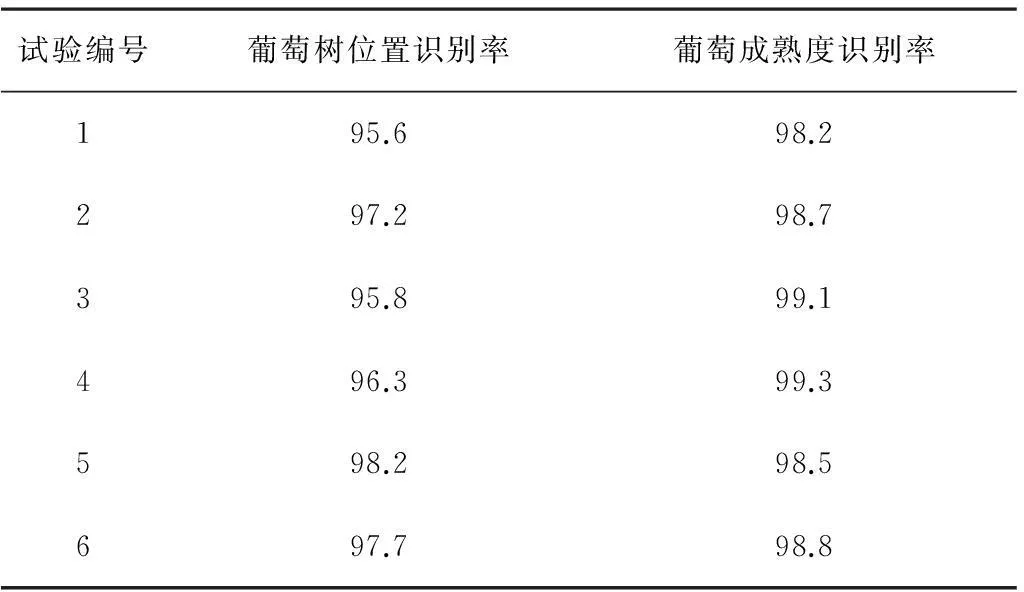
%
表1表示机器人采摘葡萄过程中导航和葡萄成熟度的准确识别率。由表1可以看出:机器人对装有传感器的葡萄树的准确识别率达到了95%以上,对葡萄成熟度的判断达到了98%以上,识别率较高,可以满足葡萄采摘的需要。
4结论
基于RSSI无线传感器定位原理和颜色特征提取理论,设计了一款新的自主导航的葡萄采摘机器人,并对执行末端、运动控制系统和导航定位系统进行了设计。通过对机器人的自动导航和葡萄成熟度识别进行测试,最终得到了定位误差曲线和图像颜色特征提取结果。由测试结果可以看出:机器人对葡萄树定位和葡萄成熟度识别的精度较高。
参考文献:
[1]任维政, 徐连明.基于RSSI的测距差分修正定位算法[J].传感器技术学报,2008,21(7):1247-1250.
[2]王永才, 赵千川,郑大钟.传感器网络自身定位方法的设计与实现[J].计算机工程与应用,2005, 41(13):4-6.
[3]李娟, 王珂, 李莉.基于锚圆交点加权质心的无线传感器网络定位算法[J].吉林大学学报:工业版, 2009,39(6):1649-1653.
[4]杨凤, 史浩山, 朱灵波, 等.一种基于测距的无线传感器网络智能定位算法[J].传感器技术学报, 2008,27(1):135-140.
[5]刘艳文, 王福豹, 段渭军,等.基于DV-Hop定位算法和RSSI测距技术的定位系统[J].计算机应用, 2007,27(3):516-527.
[6]孙佩刚, 赵海, 罗玎玎.智能空间中RSSI定位问题研究[J].电子学报,2007, 7(35):1240-1245.
[7]江冰, 吴元忠, 谢冬梅.无线传感器网络节点自身定位算法的研究[J].传感技术学报, 2007(6): 1381-1385.
[8]李连, 朱爱红.无线传感器网络中的定位技术研究[J].微计算机信息:测控自动化, 2005, 21(9): 133-135.
[9]李建中, 高宏.无线传感器网络的研究进展[J].计算机研究与发展,2008,45(1):63-72.
[10]邱天爽,唐洪,李婷,等. 无线传感器网络协议与体系结构[M].北京:电子工业出版社, 2007.
[11]石鹏, 徐凤燕, 王宗欣.基于传播损耗模型的最大似然估计室内定位算法[J].信号处理,2005, 21(5):502-504.
[12]李洪欣,杨建中.基于两参数的表冷器建模方法研究[J].建筑热能通风空调,2009,28(6):15-17.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于 Hough 变换的成熟草莓识别技术[J].农业机械学报,2007,38(3): 106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009(3):19-22.
[16]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007,12(6):41-46.
[17]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006,9(27):1-5.
[18]李文见, 姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报: 自然科学版, 2007(8): 57-59.
[19]王仲民, 戈新良, 唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003, 32(2): 30-35.
[20]国刚, 王毅.应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术, 2008,4(6):1459-1460.
[21]施少敏, 马彦恒, 陈建泗.基于BP神经网络的数字识别方法[J].兵工自动化,2006, 25(10): 40-41.
[22]许颖泉.用神经网络进行数字图像识别研究[J].应用科技, 2008(12):59-60.
A High Precision Autonomous Navigation Positioning Grape Picking Robot Design
Guo Suna1, Zhang Li1, Liu Zhigang2
(1.Henan Polytechnic Institute,Nanyang 473000,China; 2.Nanchang University,Nanchang 330031,China)
Abstract:In order to improve the autonomous navigation capability of grape picking robot, and strengthen the function of accurate identification of the grape maturity, lower leakage rate and error rate, a new type of autonomous navigation and color feature extraction based on RSSI grape picking robot has been designed. Grape picking robot using RSSI positioning technology first fixing the vine with wireless sensors, then use the machine vision system on grape maturity of judgment, and to meet the use conditions of the grapes picked for picking manipulator. Grape picking robot performance was tested, by testing found that the robot with sensors of vine of accurate recognition rate reached more than 95%, their appreciation of the grape maturity reached more than 98%, high recognition rate,which is a relatively efficient grape picking robot.
Key words:grape harvest; autonomous navigation; color identification; leakage rate of mining; robot
文章编号:1003-188X(2016)07-0020-05
中图分类号:S225.93;TP242
文献标识码:A
作者简介:郭素娜(1981-),女,河南邓州人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:国家自然科学基金青年基金项目(51305152)
收稿日期:2015-05-24
