振动深松机的研究进展与展望
2016-03-23汤明军王维新李文春魏晓玲戚庆伟
汤明军,王维新,李 霞,李文春,魏晓玲,黄 蒙,戚庆伟
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.阿拉尔万达有限公司,新疆 阿拉尔 834000)
振动深松机的研究进展与展望
汤明军1,王维新1,李霞1,李文春2,魏晓玲1,黄蒙1,戚庆伟1
(1.石河子大学 机械电气工程学院,新疆 石河子832000;2.阿拉尔万达有限公司,新疆 阿拉尔834000)
摘要:连续多年的浅层翻耕或旋耕,造成我国土壤耕层浅、耕层内有效土壤少及犁底层坚实等严重问题。针对这些问题,深松技术及深松机具的研制在近年得到快速发展。 为此,简要介绍了振动深松机的减阻原理,并从已有深松机的专利重点分析阐述了振动深松机关键部件的工作原理及设计应用,指出了存在的问题,并展望了振动深松机的发展趋势。
关键词:土壤耕作;振动深松机;振动关键机构
0引言
耕作机械的载重和碾压造成了严重的土壤压实,而在相同深度土壤下进行的连年浅层翻耕、旋耕,使耕地形成了坚实的犁底层。深松是在翻耕基础上总结出来的利用深松铲疏松土壤、加深耕层而不翻转土壤、适合于旱地的保护性耕作方法。深松可以打破犁底层、调节土壤三相比、创造虚实并存的耕层结构、减轻土壤侵蚀、提高土壤蓄水抗旱能力[1]。2009年12月,深松补贴被纳入2009年中央财政新增农资补贴资金支持范围。
长期以来,提高农业机械的能量利用率、降低耕作阻力、提高耕作质量等都是国内外农机研究人员致力解决的问题。1953年,Mogami等人最早将本属于机械加工领域的振动切削理论运用于土壤切削中[2]。1979年,Wolf和Luth设计出了第1台振动式深松机[3]。目前,振动深松机按照工作原理可以分为强迫式振动深松机和自激式振动深松机。Shahgoli等人设计的振动深松机试验证明:相较于非振动深松机,振动深松机在达到更好深松效果的情况下,在控制振铲的振幅、深松铲摆角、前进速度和振动频率时总功率相近,但功率利用率更高,可节省27%的功率[4]。有研究表明:振动深松机除牵引力消耗功率外,还有深松铲振动消耗的功率。因此,当深松铲振动频率较高时,振动深松机消耗总功率比非振动深松机高,而自激振动深松机可消除强迫式振动深松机由于激振传动系统而产生的能耗[5]。大量研究表明,振动式深松机能有效减小深松铲的工作阻力,从而减小拖拉机的牵引阻力、提高生产效率[6]。振动深松机功率消耗影响因素众多,如深松机行进速度、耕深、是否带铲翼[7]、振幅、振动频率等。王瑞丽等人研究表明:强迫式振动深松机可以大大降低牵引阻力,但不能减少总功耗[8],甚至存在总功率增加的问题;而自激振动深松机虽然能降耗,但存在耕深不稳定、机架易偏斜及机构复杂等问题。
笔者从已有专利入手,对振动式深松机的振动关键部件和其余关键部件的工作原理、结构设计进行了总结分析,旨在分析振动深松机的发展趋势,并为振动深松机具和旱地耕作机具的研制、结构优化提供一定的科考依据。
1振动深松机减阻原理及特点
Spektor运用分段线性近似的方法较为充分地分析了切削方向振动减阻机理[9-10]。Eggenmuller运用力学分析法分析了振动方向垂直于切削方向的振动犁振动减阻机理[11]。在我国,1992年殷涌光等人提出了振动式二维切削土壤减阻机理,研究表明:普通切削属于一维切削,而振动切削属于二维切削,即机具推进方向和推进垂直方向;振动时减薄了当量铲刃厚度和斗底阻力,从而减小了阻力[12-13]。 2000年,邱立春等人对ISQ-127型全方位深松机的自激振动系统进行研究,结果表明:耕作时,随着深松工作部件的前进,剪切面不断形成;在每一个剪切面形成的过程中,土壤阻力先是增加,达到土壤屈服极限时迅速下降,以此重复;由于土壤质地的不均匀性,土壤阻力在不断变化,从而引起深松机工作部件随着土壤阻力的变化而振动。由于振动作用使工作部件上产生较有利的切削条件及对土壤破碎有利的受力状态,其中部分阻力由振动部件的振动作用所承担,使牵引阻力减小。当工作部件刃口切开坚硬的土壤后,由于垂直加速度的作用,使处于部件上方的土壤向上加速运动并使土壤部件上浮起,这时作用于部件上的力几乎与运动方向垂直,所产生的牵引阻力合力很小[14]。
2我国振动深松机研究现状
2.1强迫式振动深松机的研究现状
强迫式振动深松机工作原理为将拖拉机动力输出轴动力转化为与机架连接振动部件的上下振动,最终将振动传至工作部件,使其按一定的频率和振幅振动[15]。在我国已发表的专利中强迫式振动深松机中的主要振动转化机构的结构设计及工作原理可以总结如下。
2.1.1偏心轴与十字联轴器结构
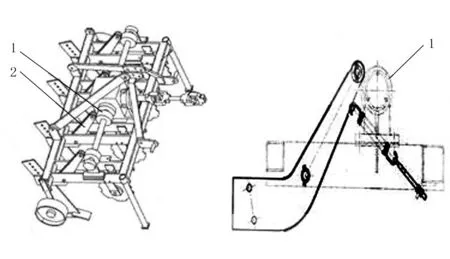
如图1所示,张东兴、李艳龙等人[16]发明一种振动深松机的振动结构,该振动机构将偏心轴的圆周运动最终转变成深松铲在竖直方向上的上下振动,振动机构主要由偏心轴、十字联轴器和杠杆构成。其工作过程:拖拉机的动力输出轴通过联轴器带动偏心轴转动,偏心轴将圆周运动转变为其上挂接的十字联轴器振动,从而十字轴的中心位置做上下振动,带动十字轴联接器下端交接的杠杆在纵向平面绕着平衡位置做小圆振动,最终带动深松铲振动。

1.轴承座 2.偏心轴 3.十字联轴器 4.杠杆 5.深松铲
中国农业大学申请的其他发明专利(如一种振动深松施肥精量播种机[17]和一种振动深松施肥机[18])等多功能一体机中的振动结构均为该偏心轴和十字联轴器形式。李霞等人试验研究表明,其发明的一种振动深松机的振动牵引阻力比不振动降低6.9%~17%[19]。
2.1.2偏心轮与连杆结构
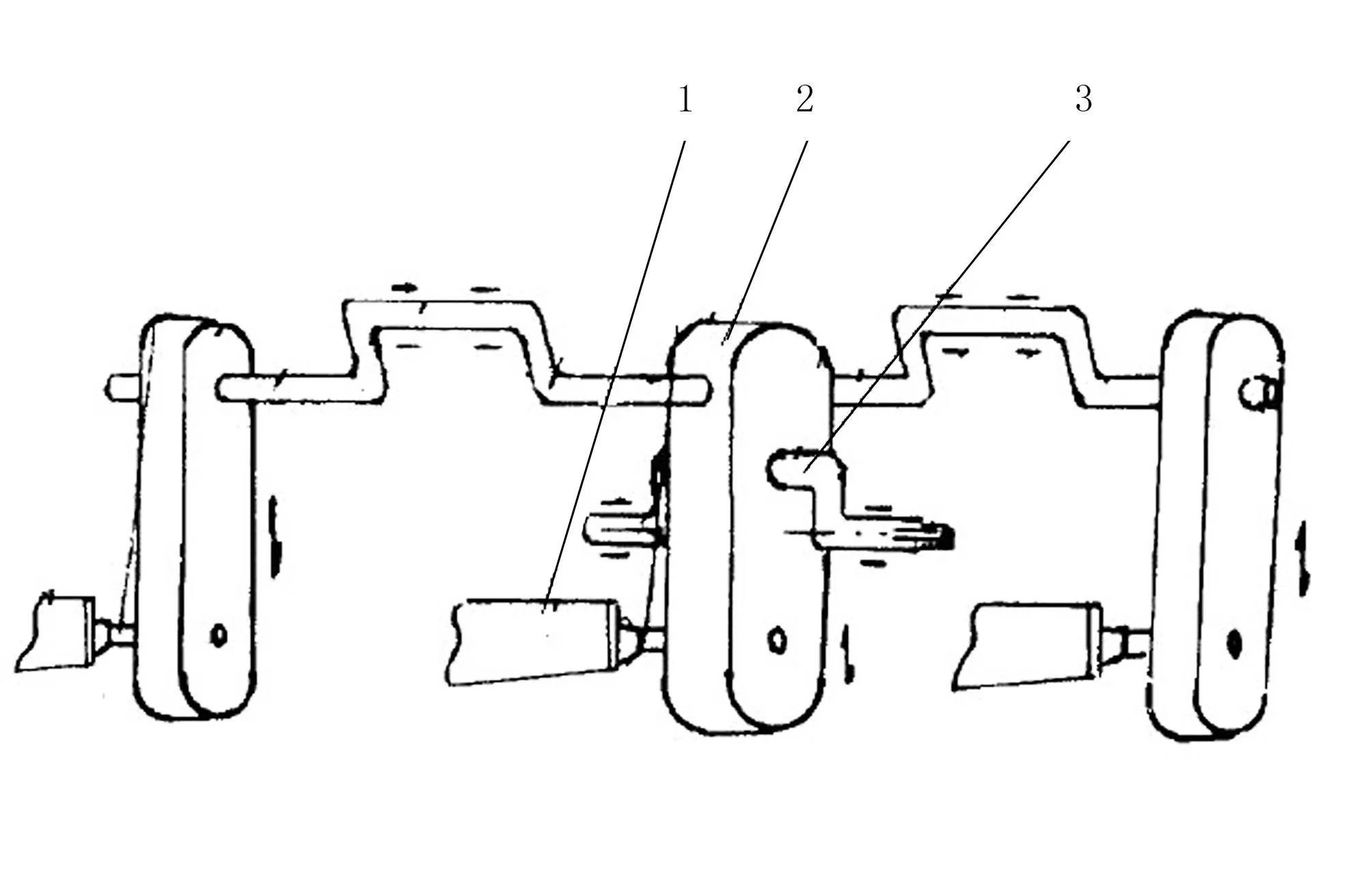
如图2所示,邓衍夫、邓传虎和邓传林发明一种采用偏心轮—连杆结构的振动机构[20],由偏心轮、偏心轴、连杆、连接臂、转动轴、长传动臂和短传动臂组成。其工作过程:偏心轮随输出轴转动带动偏心轴上连杆往复摆动,进而通过长传动臂带动转动轴在一定圆周区间内往复转动,转动轴的转动通过短传动臂传递给传动杆,从而可产生振动效果。

1.转动轴 2.短传动臂 3.长传动臂
2.1.3偏心块结构
如图3所示,徐名齐、刘彬和刘玉芝等人[21]发明一种采用偏心块机构的振动器,包括箱体、主动轴 、从动轴、偏心块和齿轮。其工作过程:箱体上转动连接有主动轴和从动轴,主动轴用于与拖拉机的后动力输出轴的动力连接,主动轴和从动轴上各固装有齿轮,主动轴和从动轴通过两齿轮的啮合实现动力连接;主动轴和从动轴上各固接有重心偏离各自轴心的偏心块,两偏心块的偏心相位一致,即两偏心块随轴转动过程中产生激振力,使深松铲在垂直方向上产生强迫振动。
2.1.4凸轮机构
如图4所示,吕建强、吕宸和刘正刚等人发明一种采用凸轮—摆杆机构的振动机构,该机构由盘形凸轮和摆杆组成。其工作原理:盘形凸轮的转动迫使相应的摆杆摆动,摆杆摆动带动深松铲摆动,实现对土壤的振动深松作业[22]。

1.从动轴 2.主动轴 3.偏心块 4.齿轮 5.箱体
1.盘形凸轮 2.摆杆
另外,陈素英、胡春胜和张西群等人发明一种采用凸轮机构的振动机构,包括振动变速箱、凸轮机构和振动臂。其工作过程:通过链传动,将与振动变速箱的输出轴相连的凸轮机构中凸轮的转动转化为振动臂和固定在振动臂末端的深松铲的自身振动[23]。
多发性骨髓瘤发病率已超过急性白血病,多见于40~70岁,特别是60岁以上的老年人,随着年龄增长,发病率逐渐升高。
2011年,孙永发明一种采用凸轮摆动机构的振动机构,包括凸轮摆动机构、轴承和机壳。其工作原理:振动源的凸轮摆动机构产生的激振力通过轴承、机壳等传给机架,传给松土铲,使其沿垂直方向产生强迫振动[24]。
2.1.5曲轴连杆机构
如图5所示,马利民、刘银栓和于芳珍等人发明一种采用曲轴连杆机构的振动机构,包括传动曲轴、连接板和振动杠杆牵引臂。其工作过程:作业时,拖拉机动力输出轴带动振动深松机的传动曲轴使连接板上下摆动,即带动振动杠杆牵引臂上下摆动,其后的深松犁随之上下振动;同时,连接板带动横向双振轴上下摆动,并经内曲轴、曲柄转轴、外曲轴及连轴板,使左右两根振动牵引臂同步上下振动,其后的深松犁也同步振动[25]。
1.振动杠杆牵引臂 2.连接板 3.传动曲轴
另外, 左淑珍,迟仁立和刘银栓等人发明一种采用双振动杠杆机构的振动机构[26],、2013年辛丽丽、梁继辉和邱立春发明一种采用曲柄套—连杆机构的振动机构[27],均与上述结构相似。
通过对上述强迫式振动深松机中振动机构的结构和工作过程的分析可知:强迫式振动深松机的振动机构主要是通过具有偏心性质的机构经过链条或齿轮传动,再经过杆件将拖拉机输出轴的圆周运动转化为深松铲柄的直线运动,从而将拖拉机的输出动力转化为振动深松铲的在深松机行进垂直方向的振动。
2.2自激式振动深松机的研究现状
自激式振动深松机是利用土壤地表不平和土壤阻力等变化激起弹簧和弹性材料等弹性元件振动,完成振动深松作业[14]。
如图6所示,蒋立军发明一种采用振动弹簧的振动机构,包括振动弹簧、弹簧支杆、支杆销、犁柱、犁柱和犁臂。其工作原理:弹簧支杆一端通过支杆销活动连接在在机架上,另一端连接在犁柱末端上;振动弹簧套装在弹簧支杆上,一端抵在机架上,一端抵在犁柱上;犁臂一端通过犁臂销活动连接在机架下方,位于地轮支杆后,犁臂另一端固定在犁柱上;利用土壤阻力的变动而推动弹簧往复运动,在振动弹簧的作用下驱动深松犁臂作前后振动[28]。
2012年,庆春、付海明和杨井华发明一种旋耕深松机伸缩臂装置[29];2014年,黄玉祥、刘彬和张鹏鹏等人也发明一种采用自激振动弹性元件的振动机构[30]。这些装置和振动机构也是利用振动弹簧遇到坚硬土质时产生振动,从而振松硬土完成深松作业。
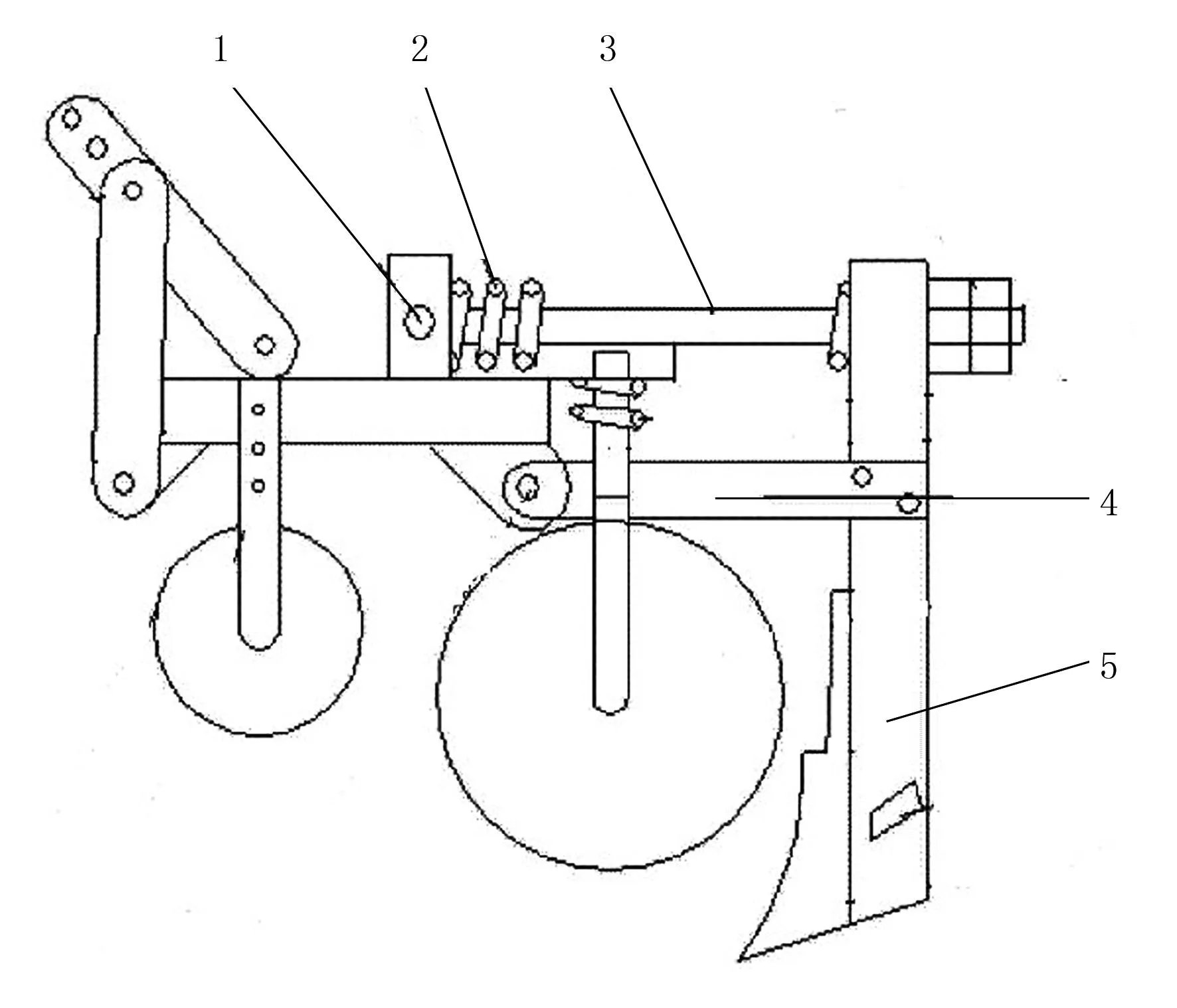
1.支杆销 2.振动弹簧 3.弹簧支杆 4.犁臂 5.犁柱
2.2.2利用弹齿耙
如图7所示,2011年李洋等人[31]发明一种新型马铃薯中耕机,其利用弹齿耙完成松土作业。作业时,中耕机在拖拉机牵引下行进,仿形弹齿在垄沟内开出浅沟,达到松土目的,同时便于除草及犁铧进行后续作业。LEMKEN公司的苗床(播前)整地机系列下的“弹齿耙Quarz”整地机(如图8所示)上安装有可承受巨大阻力的一体式紧凑设计弹齿耙,实现对土壤的深松,该机构还可以与其它机械如播种机联合作业。2012年,Geer Vladimir A’bertovich 等人[32]发明了一种宽幅重型弹齿耙,通过桁架结构增加耕作面积。2012年,余家华等人[33]对弹齿犁铲总成进行了研究,而日本学者松本健太等人[34]则对弹齿安装机构进行了研究。

1.右侧S型弹齿 2.高度调节板a 3.中间S型弹齿

图8 LEMKEN弹齿耙Quarz
目前,我国的成型深送机主要是强迫式振动深送机,自激式振动深松机尚处于研制阶段;但国外自激式振动深送机却发展得十分成熟。在我国,自激式振动深送机的振动机构主要是利用振动弹簧,机构比较单一、稳定性较差;而且所有振动弹簧的伸缩量不能保证,从而影响振动振幅和频率,导致耕深一致性难以保证,也增加了深松铲所受阻力,进而增加拖拉机的牵引阻力。
3问题及展望
1)目前,振动技术已经较为成熟地广泛应用于各类工程机械中,如液压挖掘机、振动压路机、沉桩机等[35]。振动深松机研制可以借鉴以上机械,且振动深松机的振动系统应该由机械化向机电液一体化系统转变。东北农业大学孔德刚等人发明了一种机械式气压深松机[36],该机包括车架、固定于车架前部的高压气泵、气压控制系统总成、机电液控制系统总成、液压马达和减速箱。其工作原理是:通过对耕地土壤深层注入高压空气打破耕地犁底层,实现对耕地的深松。这种深松方式可以不翻动土壤完成对不同深度、不同硬度犁底层的深松作业,这一发明是对深松技术的拓展,为深松机机具的研制提供了新思路和新方向。
2)目前,自激式振动深松机作为耕地机具节能降耗的一条有效技术途径,其自激振动机理研究还有待突破和完善,以便为自激振动深松机的研制提供有力的理论支撑和指导。
3)目前,精准农业是农业下一步发展大趋势,振动深松机机具研制和深松技术体系的发展应该与精准农业相配套。
参考文献:
[1]时均莲,邱立春. 国内外深松技术及深松机具概况[J]. 农业机械,2005(3):58-59.
[2]Mogami T, Kubo K. The behavior of soil during vibration[J].In Proceedings of the Third International Conference of Soil Mechanics and Foundation Engineering,1953(1):152-155.
[3]Wolf D,Luth H J.Tillage equipment for clod forming soils[J]. Transaction of the ASAE, 1979, 22(5):1029-1032.
[4]Shahgoli G, Fielke J, Desbiolles J, et al. Optimising oscillation frequency in oscillator tillage[J]. Soil & Tillage Research, 2010,106:202-210.
[5]常科峰,初旭宏.土壤深松自激振动弹性元件的设计[J].现代化农业, 2008(11):29-30.
[6]李时昀,王雪艳,毕进德.振动深松机技术经济论证[J].农机化研究,2006(5):60-62.
[7]韩树明.深松机功率消耗影响因素及其关系的试验研究[J].农机化研究,2008(5):128-130.
[8]王瑞丽,李宝筏,邱立春,等.1ZS-2型振动深松机的研究设计[J].农机化研究,2004(5):134-135.
[9]Spektor M. Principles of Soil-Tool Interaction[J].Journal of Terranechanics, 1981, 18(1):51-65.
[10]Spektor M, Hirsch. Working Processes of Cyclic-Action Machinery for Soil Deformation-Part Ⅱ[J].Journal of Terramechanics, 1984, 21(4):361-379.
[11]Eggenmuler A. Feild Experiment with An Oscillating Plow Body[J]. Grundlagender Landtechnik, 1958(10):89-95.
[12]殷涌光,李俊明,王国强.二维振动铲装的实验研究[J].农业机械学报, 1994, 25(2):18-23.
[13]殷涌光,陈悦荪,李俊明.振动式二维切削土壤减小阻力机理[J]. 农业机械学报, 1992, 23(2): 11-16.
[14]邱立春,李宝筏.自激振动深松机减阻试验研究[J].农业工程学报, 2000, 16(6):72-75.
[15]徐宗保,董欣,李紫辉,等. 振动式深松中耕作业机的研制与试验研究[J].农机化研究,2010,32(1):182-184.
[16]张东兴,李艳龙,刘宝. 一种振动深松机的振动机构:中国,200910078311.9[P].2009-07-15.
[17]张东兴,李霞,杨丽,等.一种振动深松施肥精量播种机:中国,201110284489.6[P].2012-04-11.
[18]张东兴,李霞,付俊峰,等.一种振动深松施肥机:中国,201010621161.4[P].2011-07-27.
[19]李霞,付俊峰,张东兴,等.基于振动减阻原理的深松机牵引阻力试验[J].农业工程学报, 2012, 28(1):32-36.
[20]邓衍夫,邓传虎,邓传林.振动式旋耕、深松一体机:中国,201210286100.6[P].2012-11-07.
[21]徐名齐,刘彬,刘玉芝,等.全方位振动深松机:中国,201020189592.3[P].2011-01-05.
[22]吕建强,吕宸,刘正刚,等.可调频振动深松机:中国,201310590488.3[P].2014-02-26.
[23]陈素英,胡春胜,张西群,等.一种可调式深松施肥播种一体机:中国,201020139976.4[P].2010-11-24.
[24]孙永.振动深松机:中国,201120251222.2[P].2012-03-07.
[25]马利民,刘银栓,于芳珍,等.三行振动深松机:中国,03250969.3[P].2004-06-02.
[26]左淑珍,迟仁立,刘银栓,等.双行振动深松机:中国,03239859.X[P].2004-04-14.
[27]辛丽丽,梁继辉,邱立春.振动式深松机:中国,201310081489.5[P].2013-05-22.
[28]蒋立军.一种振动式深松机:中国,201210196080.3[P].2012-09-19.
[29]史庆春,付海明,杨井华.一种旋耕深松机伸缩臂装置:中国,201210331965.X[P].2012-12-12.
[30]黄玉祥,刘彬,张鹏鹏,等.一种新型自激振动式深松机:中国,201420288196.4[P].2014-11-05.
[31]李洋,王泽群,杨德秋,等.一种新型马铃薯中耕机:中国,201110364409.8[P].2012-06-20.
[32]Geer Vladimir Al’bertovich, Geer Sergej Vladimirovich, Il’ichev Aleksandr Borisovich. Wide-cut heavy spring-tooth harrow:俄罗斯,2012108657/13[P].2013-10-08.
[33]余家华,王波,王兴军,等.一种弹齿犁铲总成:中国,201410358113.9[P].2014-11-26.
[34]松本健太,日田定范,熊谷雅行,等.弹齿安装结构:中国,201320266728.X[P].2013-11-06.
[35]庄凯,郭志军.振动减阻技术应用于土壤耕作机具的研究[J].农机化研究,2014,36(5):212-217.
[36]孔德刚,左胜甲,李紫辉,等.一种机械式气压深松机:中国,201410456941.6[P].2014-12-10.
Research Progress and Prospect of Vibrating Subsoiler
Tang Mingjun1, Wang Weixin1, Li Xia1, Li Wenchun2, Wei Xiaoling1, Huang Meng1, Qi Qingwei1
(1.College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832000, China;2.Ala’er Wan Da Limited Company, Ala’er 834000, China)
Abstract:After successive years of shallow ploughing and rotary tillage, the effective soil has become less in the soil plough layer which has become shallow and the plowpan has become hard. For these problems, the development of subsoiling technology and subsoiler has become rapid in recent years. This paper provide a brief introduction of the principle on drag reduction of vibrating susboiler, and the working principle and design application of the key mechanism of the vibrating subsoiler carry on the selective analysis elaboration from the existing patent. Finally, this paper points out the existing problems and forecasts the development trend of vibrating subsoiler.
Key words:soil cultivation; vibrating subsoiler; the key mechanism of vibration
文章编号:1003-188X(2016)04-0258-06
中图分类号:S233.1
文献标识码:A
作者简介:汤明军(1992-),男,湖北孝感人,硕士研究生,(E-mail) 1363716355@qq.com。通讯作者:李霞(1978-),女,河北衡水人,副教授,(E-mail)lixia0415@163.com。
基金项目:国家自然科学基金项目(5136505);新疆兵团科技人员服务南疆专项(2014BA058);石河子大学高层次人才启动项目(RCZX201307)
收稿日期:2015-03-23
