基于Qt5.0的机器人姿态检测与控制系统的设计
2016-03-23谢学刚董桂菊郭凯敏郭志强朱铁欣
谢学刚,董桂菊,于 猛,郭凯敏,郭志强,朱铁欣
(东北农业大学,哈尔滨 150030)
基于Qt5.0的机器人姿态检测与控制系统的设计
谢学刚,董桂菊,于猛,郭凯敏,郭志强,朱铁欣
(东北农业大学,哈尔滨150030)
摘要:针对农业上降低生产安全危害、减少生产成本及节约劳动力的需要,提出了机器人远程控制的精细化要求,即快速性、可靠性。本设计上位机选用基于QT5.0的开发平台,无线通讯方面选用NRF905无线通讯模块作为通讯手段,选用MPU6050作为姿态传感器采集机器人的实时姿态数据。 经验证表明:该控制系统平台的反应速度较高,且能准确传回姿态数据,达到了短距离无线控制与检测姿态的目的,为农业大棚采摘定位提供了技术保障。
关键词:农业机器人;远程控制;无线通讯;上位机
0引言
随着科技的发展,很多农业生产场合不适合人去进行近距离操作(如夏季大棚内的灌溉、喷药等),机器人则成为了代替人进行直接操作的首选。其能否快速、准确地完成相应的命令成为研究成败的关键。国内的研究大都是基于JAVA操作平台的,其介入网络的能力非常强大;但网络本身就存在着一定的弊端,如一旦网络连接失败或系统崩溃,会导致整个上位机彻底失去对机器人的操控能力,在一定程度上存在安全隐患。由挪威的TrollTech公司出品的Qt操作平台不但能够有效地避免介入网络且兼容性非常高,具有良好的跨平台性,能够省去不少移植的麻烦。由于良好的封装机制,使得Qt有非常高的模块化程度,有利于开发;同时,提供了一种signals/slots的安全类型来代替callback,使得各个原件之间的协同工作变得简单、有效。它是一个跨平台的C++图形用户界面应用程序开发框架,既可以用于开发GUI程序,也可以用来开发非GUI程序,如控制台工具和服务器。Qt开放源代码最大的特点是有弹性,QtEmbedded最小可以缩到800kB左右,最多能达到3MB,这使得Qt更能适合在嵌入式环境下工作。Qt与JAVA同属于跨平台的开发工具,但是原理却是完全不同的。Qt的跨平台是在代码级实现的而JAVA是在运行级实现的,不需要虚拟机,做到了“一次编码,到处编译”;而JAVA则是“一次编译;到处运行”,。相比较而言,Qt开发的程序运行效率要高于JAVA,更适合有实时性控制要求的场合,如再结合简单而强大的主流无线通讯模块NRF905,可成功实现无线控制的功能。
1系统硬件设计
1.1姿态传感器的选择
系统的关键技术是无线通讯和姿态采集的实时性及准确性。MPU6050是国际首例整合性6轴运动处理组件,包括3轴陀螺仪和3轴加速器。相比其他器件而言,免除了组合加速器与陀螺仪时之轴间差的问题,向应用端输出完整的数据是依靠I2C以单一数据流的形式传输,从而有力地保证机器人姿态采集的准确性。
1.2核心处理器的选择
本次设计的系统以STC12C5A60S2单片机作为硬件核心,是由宏晶公司生产的新一代增强型8051单片机。其指令代码完全兼容传统8051,但速度比传统的8051单片机快8~12倍;内部集成MAX810专用复位电路,8路高速10位A/D转换及两路脉冲捕获模块和双串口;同时,其EEPROOM和程序存储区的大小也都不一样。
1.3无线传输模块的选择
本着节约成本的思想,本系统选用NRF905作为无线传输模块,其传输距离为150m,抗干扰能力强、低功耗,拥有内置的CRC检错及点对多点的通信地址控制,还拥有标准的DIP间距接口;同时,无需外加声表滤波器就能有良好的通信效果,融合了ShockBurstTM技术,能够自动处理数据包字头,非常适用于工业数据的采集。
1.4系统框图设计
系统由核心处理器STC12C5A60S2、数传模块NRF905及姿态模块MPU6050等组成,硬件连接图如图1所示。

图1 硬件连接图
2系统软件设计
为了在硬件系统上完成控制旅行家IV号和实时获取其姿态信息,在Qt5.0平台上采用C++语言编写了相应的的应用程序,程序流程如图2所示。
硬件设备连接完毕后,进行程序加载。对各模块进行初始化(包括MPU6050模块、NRF905模块、等);初始化完成以后,即刻打开上位机界面,进行远程控制并采集姿态数据。
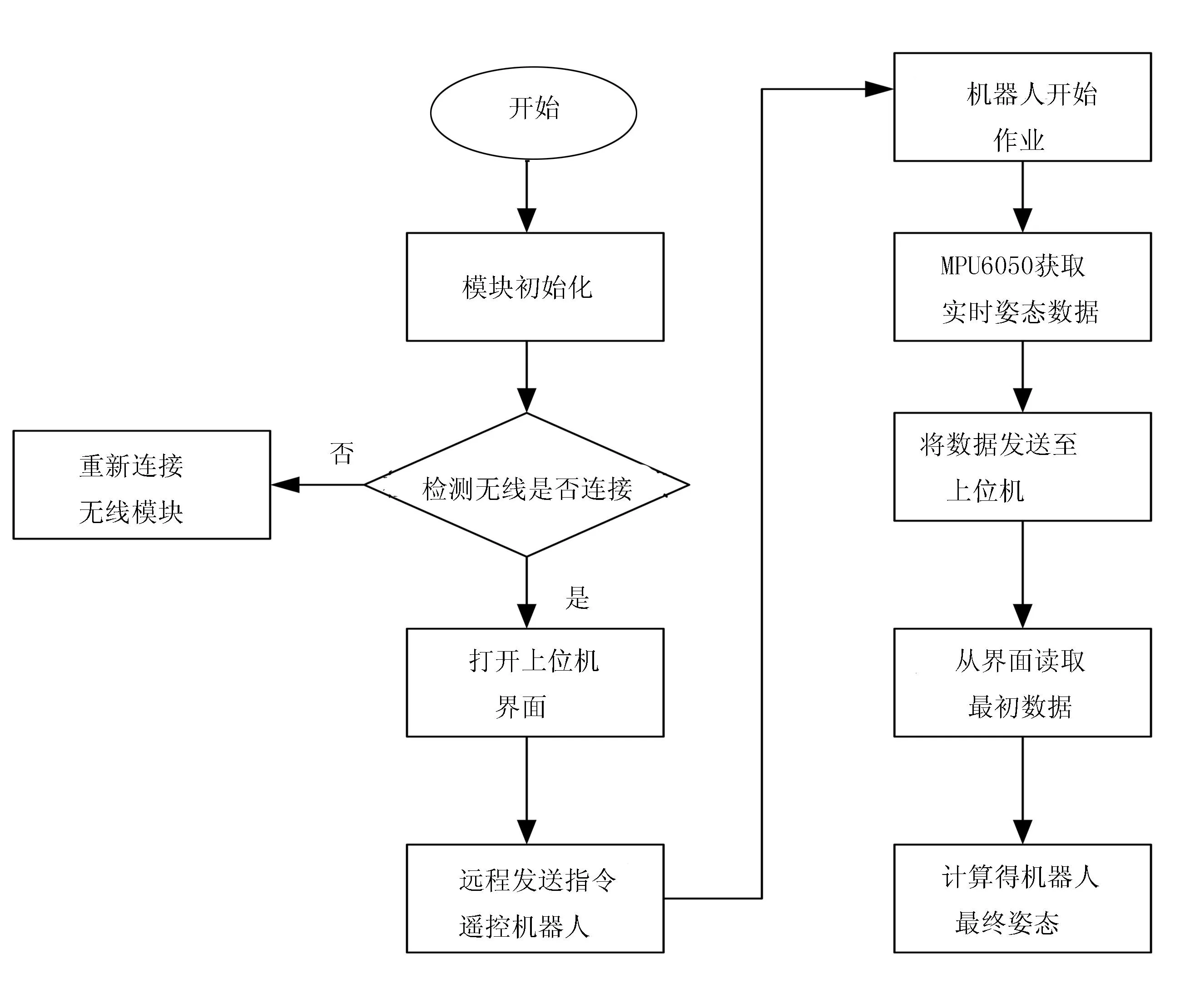
图2 软件流程图
3实验数据与数据处理
MPU6050可通过LCD1602直接显示出最初的加速度值和陀螺仪数值,并可通过其内部的计算原理解算出机器人的姿态数据,无需经过卡尔曼滤波。为了验证数据传输的准确性,将上位机安装1个LCD用来检测接收到的数据。其中Gx、Gy、Gz为陀螺仪采集的原始数据,Ax、Ay、Az为加速度计采集的原始数据。表1为实验所得的最初MPU6050数据、上位机LCD显示接收到的数据和经过计算后所得到的最终机器人姿态数据。为了验证姿态传输的有效性,将机器人放在坡脚为30°的斜坡上,在上位机上观测其当前的模拟姿态如图3所示。

图3 上位机模拟图
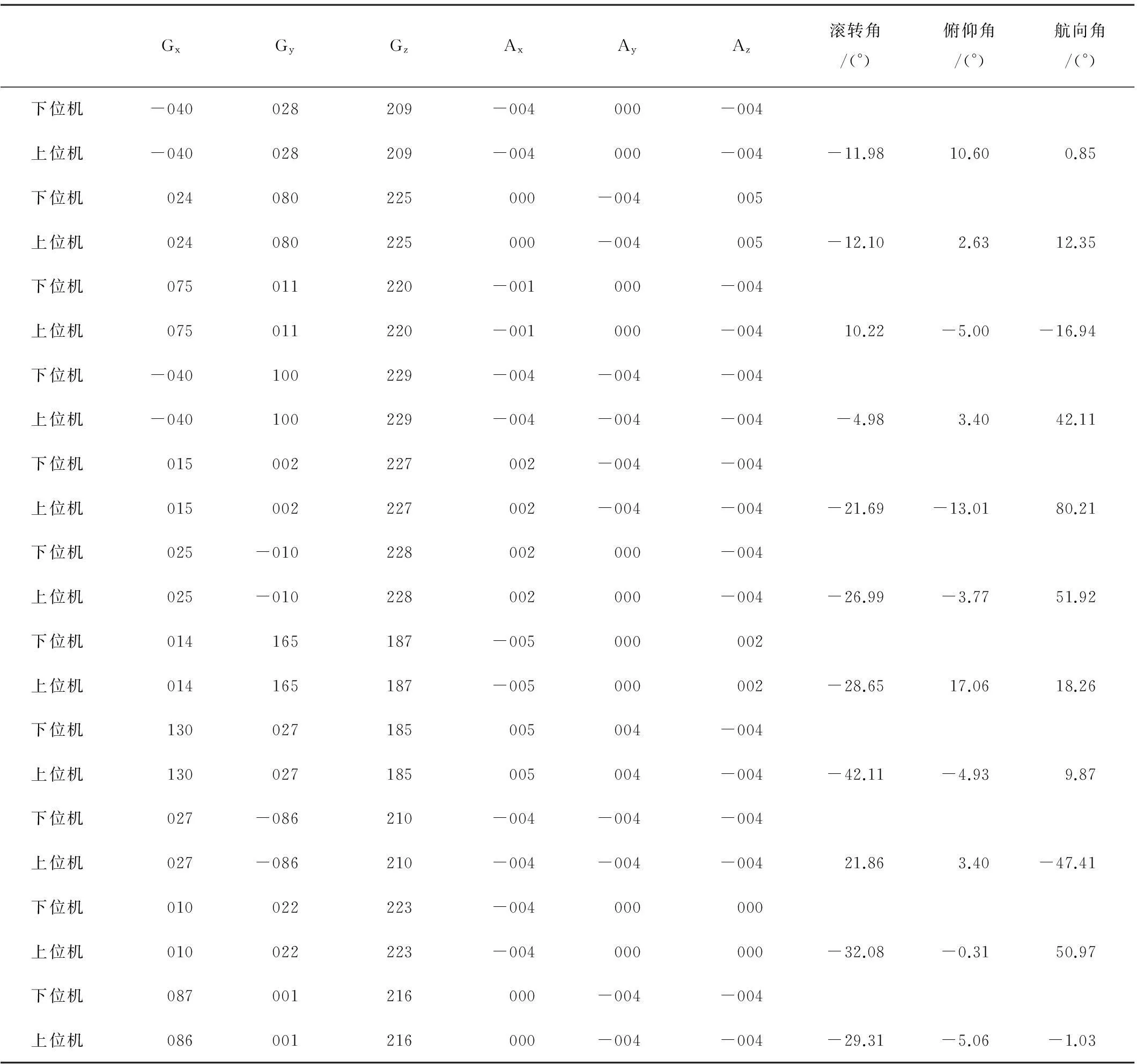
GxGyGzAxAyAz滚转角/(°)俯仰角/(°)航向角/(°)下位机-040028209-004000-004上位机-040028209-004000-004-11.9810.600.85下位机024080225000-004005上位机024080225000-004005-12.102.6312.35下位机075011220-001000-004上位机075011220-001000-00410.22-5.00-16.94下位机-040100229-004-004-004上位机-040100229-004-004-004-4.983.4042.11下位机015002227002-004-004上位机015002227002-004-004-21.69-13.0180.21下位机025-010228002000-004上位机025-010228002000-004-26.99-3.7751.92下位机014165187-005000002上位机014165187-005000002-28.6517.0618.26下位机130027185005004-004上位机130027185005004-004-42.11-4.939.87下位机027-086210-004-004-004上位机027-086210-004-004-00421.863.40-47.41下位机010022223-004000000上位机010022223-004000000-32.08-0.3150.97下位机087001216000-004-004上位机086001216000-004-004-29.31-5.06-1.03
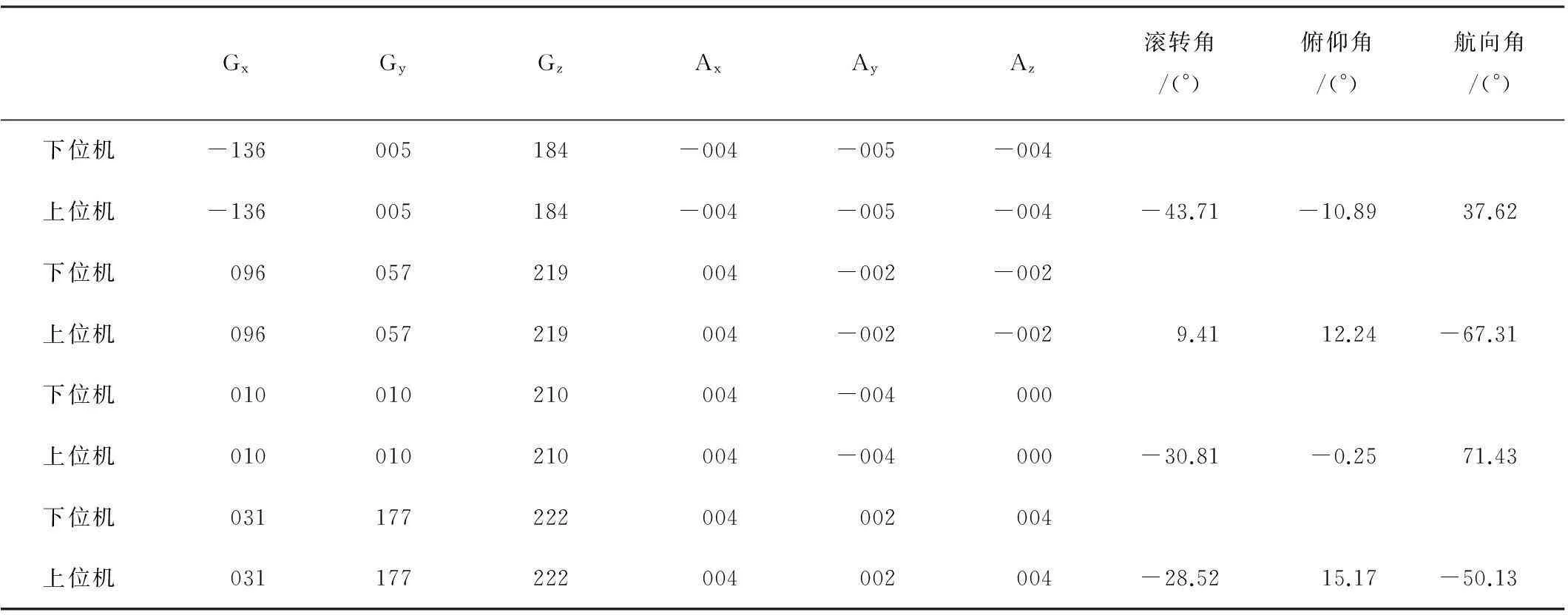
续表1
由图3和表1的数据可知:测量所得的数据传输误差率为零,即机器人在不动运动状态下根据MPU6050所测得的数据能够有效地反映出其当前的姿态。
控制方面则是由基于Qt5.0的上位机界面的控制按键进行人工控制。按键按下后,发送相应的内部控制指令,通过无线数传模块传输给机器人,机器人及时作出相应的动作,以调节当前姿态。由此可见:该系统实时监测和控制机器人姿态是十分可靠的,达到了最初的设计要求,在无网络条件下实现短距离无线监测与控制机器人。
4结论
以STC12C5A60为主控制芯片,基于Qt5.0作为上位机系统,集远程无线控制、实时姿态检测力和高速数据传输能力对旅行家IV号机器人进行了一系列实验。结果表明:该系统满足了机器人对实时性、准确性的要求,为机器人实现实时、准确地采摘果蔬、喷洒农药及各种农业用途打下了坚实基础。
参考文献:
[1]胡玉良.基于51单片机的上位机软件设计[J].农业工程学报, 2010,21(5):98-101.
[2]龚军.基于ZigBee的多智能小车远程监控系统的设计与研究[D].南京:南京师范大学,2009.
[3]Deepak B L, Parhi DR, Kundu S. Innate immune based path planner of an autonomous mobile robot[J].Procedia Engineering, 2012,38:2663-2671.
[4]黎世文. 轮式越野机器人控制系统的研究[D].哈尔滨:哈尔滨工业大学,2007.
[5]李彦明,徐军. 基于无线通讯的承压管道检测机器人多级控制系统[J].上海交通大学学报,2011,42(9):162-166.
[6]俊杰. 基于无线网络的机器人远程控制系统集成平台研究[D].北京:北京交通大学, 2012.
[7]刘金会,郝静如.QT5.0的界面设计.QT开发平台[J].计算机工程与设计,2011,23(4):1-4.
[8]Sebastia Galmes.Mobile Ad hoc and Sensor Systems(MASS).Lifetime Issues in Wireless Sensor Networks for Vineyard Monitoring [J].Computer Vision and Image Understanding, 2009, 90(2):190-216.
[9]赵海文.基于多传感器的移动机器人行为控制研究[D].哈尔滨:哈尔滨工业大学,2007.
[10]赵匀,武传宇,胡旭东,等.农业机器人的研究进展及存在的问题[J].农业工程学报,2003,19(1):20-24.
[11]Abiyev R, Ibrahim D, Erin B. Navigation of mobile robots in the presence of obstacles [J].Procedia Engineering,2011,15:2738-27418.
[12]Wang Z Q, Zhu X G, Han Q Y. Mobile robot path planning based on parameter optimization ant colony algorithm[J] . Bio systems Engineering, 2002,83(4): 405-412.
[13]何祥.随动系统远程控制实验平台的研究与开发[D]. 南京:南京航天航空大学,2005.
[14]Rakuna J, Stajnnkoa D, Zazulab D. Detecting fruits in natural scenes by using spatial-frequency based texture analysis and multiview geometry[J]. Computers and Electronics in Agriculture,2011,76(1):80-88.
[15]刘金会,郝静如.QT5.0的界面设计.QT开发平台[J].计算机工程与设计,2011,23(4):1-4.
Abstract ID:1003-188X(2016)04-0090-EA
Robot’s Posture Inspect And Control System Design Based on Qt5.0
Xie Xuegang, Dong Guiju, Yu Meng, Guo Kaimin, Guo Zhiqiang, Zhu Tiexin
(Northeast Agricultural University, Harbin 150030, China)
Abstract:According to agricultural to reduce the harm of production safety and production cost,saving labor. Propose the refinement of requirements on the remote control of the robot like rapidity and reliability. The design of principal computer is based on QT5.0 development platform,choose NRF905 as the wireless communication module and choose MPU6050 as the posture sensor to collect real-time posture data of the robot. After experimental verification, this control system have a fast reaction rate and is able to accurately back posture data, implement the aim of short distance wireless control and testing posture.
Key words:agricultural robot; remote control; wireless communication; principal computer
文章编号:1003-188X(2016)04-0090-04
中图分类号:S237
文献标识码:A
作者简介:谢学刚(1990-),男,黑龙江七台河人,硕士研究生,(E-mail)499757429@qq.com。通讯作者:董桂菊(1967-),女,哈尔滨人,副教授,硕士生导师。
基金项目:国家“863计划”项目(810028)
收稿日期:2015-05-18
