抽水蓄能机组连续盘车相位识别方法研究
2016-03-23杨梦起周尚谋中国南方电网有限责任公司调峰调频发电公司广州50000广东工业大学广州50006
彭 铖, 杨梦起, 周尚谋(.中国南方电网有限责任公司调峰调频发电公司,广州 50000;.广东工业大学,广州 50006)
0 引 言
抽水蓄能机组的轴线测量、分析和调整是机组检修中最为关键的工序。盘车时间的长短将直接关系到整个安装检修的直线工期控制,盘车质量的好坏对机组的运行状况也有着重要的影响[1]。目前我国绝大多数水轮发电机组,如三峡左岸电站700 MW常规水电机组,广蓄二期300 MW抽水蓄能机组,其轴线调整都采用传统盘车人工等角测量。传统的等角盘车人工读数方法存在不可克服的失真弊病,如:测数不准,无法一步调整到位,造成反复、无效劳动多;劳动强度大,工作效率低;现场布置繁杂,安全生产与劳动质量存在一定问题[2,3]。因此,水电机组轴线测量调整技术必将朝着智能化、自动化方向发展,以减少人工测量误差,得到真实有效的盘车数据,这也成为提高机组轴线调整技术的突破口[4-7]。
抽水蓄能机组连续盘车系统就是针对上述问题开发出来的。首先,通过在盘车装置上增加传感系统,使盘车过程变为连续过程,被测点数不受限制,也不需要停留在被测部位,这样在大大节省盘车工序时间的同时,还可显著提高测量精度。其次,通过在旋转轴上沿圆周等距离布置若干光带纸,然后配合光电传感器与测量摆度的涡流传感器同步采样就可以减少转速不均匀所带来的误差,解决测点的轴位问题。
1 连续盘车系统体系
结合国内外抽水蓄能机组轴线调整的现状及趋势,综合考虑产业化发展需求,本系统采用的方案如图1所示。
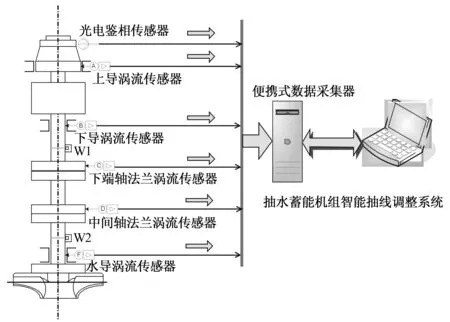
图1 抽水蓄能机组智能轴线调整系统Fig.1 Intelligent axis adjustment system in pumped storage units
该盘车系统主要包括以下内容。①盘车动力系统:出于成本及项目要求,采用的是人工盘车,盘车过程都不能保证大轴转速匀速,因此测点轴号间的相位并不是等角。因此,需要一种相位鉴别技术来确定采样点的相位。另外初始相位如何确定也一直是影响连续盘车系统一个重要关键因素。②传感器标定系统:对盘车前各通道传感器进行标定。③数据采样系统:采用多通道独立并行方式进行采样。④相位识别系统:由于大轴转速的不均匀,导致测点轴号间的相位并不是等角,所以需要采用相位识别技术对初始相位及采样点相位进行识别和标记。⑤数据滤波系统:因为抽水蓄能机组所处环境可能导致采样信号中混有杂波信号,而盘车时间一般较长(3 min左右1圈),频率较低,所以采用FIR低通数字滤波。⑥正弦拟合系统:盘车的摆度曲线理论上应该是一条正弦曲线,因此采用进化算法获取摆度正弦曲线的3个参数,即摆度幅值、摆度初相位和摆度直流分量[8,9]。
2 相位识别技术
2.1 初始相位识别技术
由于该项目采用传统人工盘车方式,采样点非常多且不能保证转角均匀,为计算被测部位最大摆度方位角,需要一种相位鉴别技术来确定采样点的相位。所以初始相位如何确定是影响抽水蓄能机组连续盘车系统一个重要关键因素。首先,在旋转轴上沿圆周等距离布置若干光带纸,(参见图2,为满足精度要求建议采用8或16条光带,这里采用的是8条光带),建议在实际应用中按精度要求增加光带纸的数量,安装光带纸时应保证尽可能均匀地沿轴颈圆周上分布,由此可减小相位角测量的误差。然后在布置的光带纸中任选一条,在其邻近处多贴一条相同的光带纸,如此一来就可以巧妙地判断测点的初始相位。图3是初始相位识别方法的原理流程方案图。
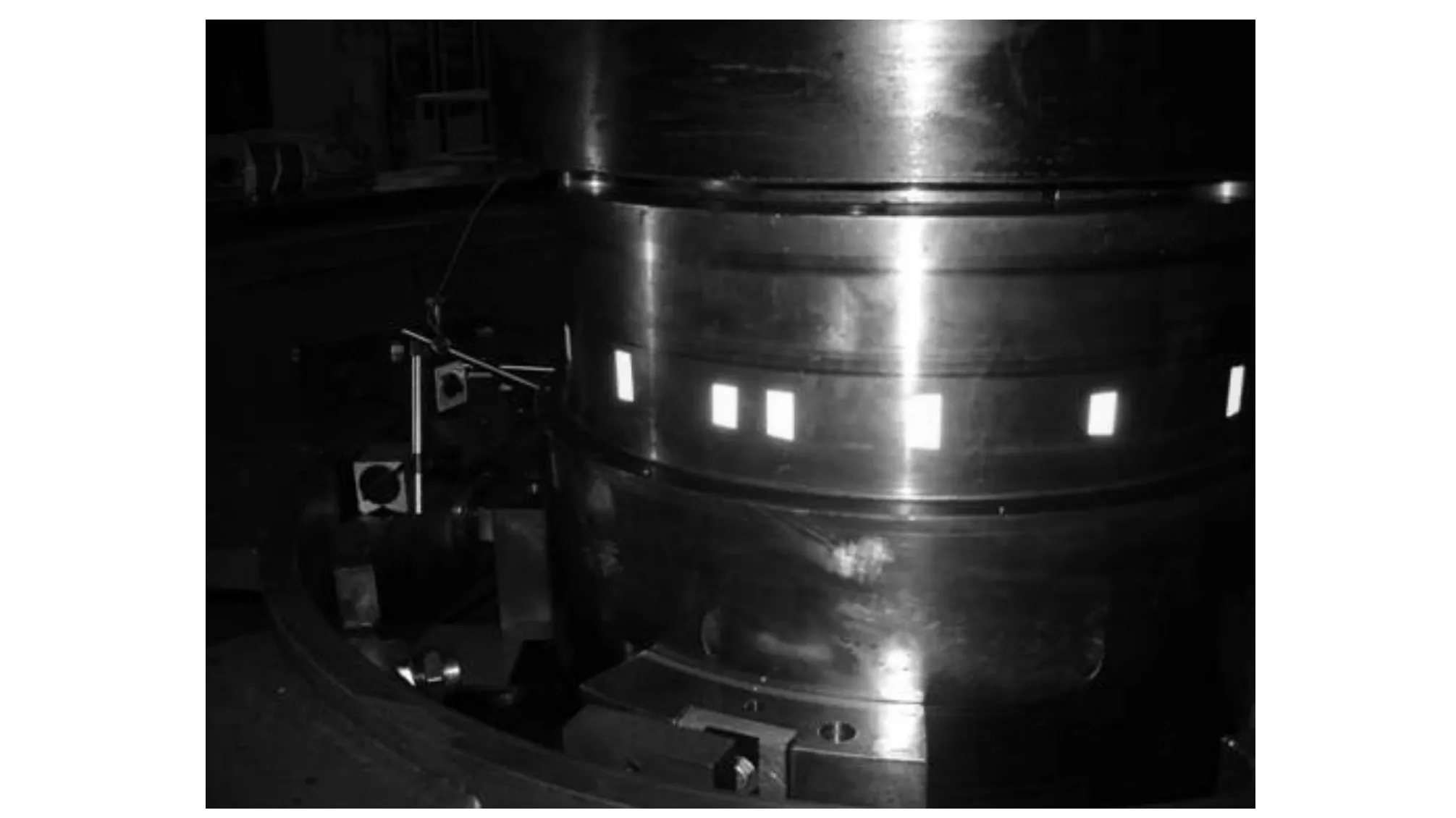
图2 光带纸布置示意图Fig.2 Light paper layout diagram

图3 初始相位识别原理图Fig.3 The principle diagram of the initial phase identification
初始相位识别是摆度计算的一个关键基础,在希望将某光带前边缘视为初始相位的相邻之处增加一条相同光带,这样就可以区别开其他光带。算法关键在于如何从光电采样数据中找出初始相位。图3初始相位识别原理的两个关键点在于:①从盘车一个周期内的光电采样数据中计算所有相邻两条光带的距离(实际上是指相邻两条光带间的时间采样点数),从而找出其中最短的距离,便可以确定相邻两条光带为最短距离的前一条光带的前边缘为初始相位。②计算第一条光带对应轴号的序号,这里有两种情况需要考虑:一种情况是盘车的初始相位恰好为第一个光电数据,显然此时的轴号为1;另外一种情况是初始相位并不是第一个光电数据。
2.2 相位转换技术
因为是人工盘车方式,所以不能保证转角均匀,为了将不均匀的采样点图转换至均匀的相位图,需要利用在旋转轴上沿圆周等距离布置的光带纸(如图2),配合光电传感器与测量摆度的涡流传感器同步采样。这样一来虽然轴速不能保证绝对均匀,但是由于光带点比较密集,所以把光带点之间的摆度采样点做近似等距离处理并不会造成很大误差。图4是相位转换方法的原理流程图。其中相位转换公式如下:
(1)
式中:i为第i个摆度采样点;Xi为第i个摆度采样点对应的相位,(°);GdNum为布置的光带数目;j为第j个轴号;Lj为第j个轴号的光带位置数据(即对应的采样点数据)。

图4 相位转换原理图Fig.4 The principle diagram of the phase transformation
3 应用案例
本试验以某抽水蓄能电厂盘车采样数据为例,数据包括由涡流传感器测量的上导、下导、法兰处的摆度采样数据(水导处没有加装传感器)以及由光电传感器测量的相位数据。首先,由于采样数据可能混有许多干扰信号,先对数据进行滤波处理。然后,将滤波后的数据取出一个周期进行相位转换,把滤波后的数据(大轴转速不均匀)转换到均匀的相位图中。图5是原始采样4000点数据界面,图6是将滤波后信号装换至相位图界面。

图5 连续采样界面Fig.5 Continuous sampling interface
图5光电数据中距离最近的2个上升沿是初始相位,其他光电数据上升沿间的采样点数不同是因为连续盘车时大轴转速不均匀造成的。因此,我们利用相位转换技术,流程图如图4,就能将不均匀的采样点图转换成均匀的相位图,得到如图6的界面。

图6 相位图界面Fig.6 The phase diagram interface
4 结 语
本文简单介绍了抽水蓄能机组连续盘车系统,着重阐述了该连续盘车系统的相位识别技术。通过涡流传感器配合光电传感器同步采集信号,运用初始相位识别和相位转换技术,解决了连续盘车相位识别问题。减少了系统误差,提高了盘车的准确性。由上述成功案例说明该解决方案可行有效,有良好的实用及推广价值。
□
[1] 王胜超. 简析水轮发电机组盘车[J]. 电工文摘,2012,(4):54-58.
[2] 徐 刚. 任意转角盘车新方法研究[J]. 东北电力技术,1998,(10):18-21.
[3] 徐 刚,刘 健. 龙滩1号机组盘车数据处理的优化[J]. 红水河,2008(,2):72-74.
[4] 孟安波,刘秀良,闵占奎,等. 水电机组全自动智能盘车系统设计与应用[J]. 大电机技术,2012,(1):31-33, 64.
[5] 孟安波,刘秀良,徐海波,等. 水电机组智能盘车系统关键技术探讨与实践[J]. 自动化与信息工程,2011(2):36-38.
[6] 史恩泽,齐经纬. 太平湾电厂多点任意角盘车软件开发及功能介绍[J]. 水电站机电技术,2009,(5):22-24.
[7] 刘润根,杨 虹,李 辉,等. 水电站机组智能盘车系统设计与应用[J]. 中国水利水电科学研究院学报,2015,(1):74-80.
[8] 孟安波,徐海波. 基于遗传算法的水电机组盘车数据处理方法研究[J]. 水力发电,2011,(10):61-62.
[9] 彭 丽. 粒子群算法在曲线拟合中的应用[J]. 软件导刊,2011,(2):55-56.