基于扩展自适应融合算法的GILS进近系统研究
2016-03-17于耕,宗平
于 耕,宗 平
(1.沈阳航空航天大学 民用航空学院,沈阳 110136;2.沈阳航空航天大学 电子信息工程学院,沈阳 110136)
基于扩展自适应融合算法的GILS进近系统研究
于耕1,宗平2
(1.沈阳航空航天大学 民用航空学院,沈阳110136;2.沈阳航空航天大学 电子信息工程学院,沈阳110136)
摘要:通过研究飞机在低可见视程条件下的进近问题,力图充分利用全球卫星导航系统的能力,使机场在不需要更新陆基无线电导航系统的情况下从I类盲降标准提升到II类及以上的相同或可比拟的运行标准;通过对某航空公司飞行数据的分析,为提高飞机进场水平导航精度和空域利用率,提出了组合应用全球卫星导航系统GNSS(global navigation satellite system)和仪表着陆系统ILS(instrument landing system)的进近体制模型,即为GILS(GNSS and ILS)进近系统;利用扩展自适应融合算法,将两种导航源的定位数据融合,通过数学建模,仿真模拟飞机进近航迹;仿真和实际验证试飞数据表明,该方案可有效提高飞机的水平导航精度和空域利用率,有潜力将CAT I标准提升为类CAT II水平。
关键词:GNSS;ILS;GILS进近系统;扩展自适应融合算法
0引言
飞行过程中最困难和复杂的过程是进近和着陆。在低能见度的条件下,若缺乏必要的进近手段和程序引导,飞机降落将是极为危险的作业。当能见度为零时,机组无法建立目视参考,必须按照CAT II标准实施降落程序。这种情况下,需要飞机飞行控制系统联合着陆/引导系统实施自动着陆或精密进近程序。这种类型的程序由仪表着陆系统ILS(instrument landing system)提供了数十年。无线电频率干扰、拥堵和建设难度持续增加等诸多因素促使国际民用航空组织ICAO(international civil aviation organization)寻找可以替代ILS的精密进近系统[1]。
对于中国民航而言,结合中国国情,不能一次性终止ILS的使用,需要一个过渡阶段。为此,本文提出将ILS导航源和全球卫星导航系统GNSS(global navigation satellite system)导航源的优势相结合[2-3],基于扩展自适应融合算法,实现一个非常精确和可靠的进近引导体制,本文称为GILS(GNSS and ILS)组合进近系统。
1进近系统模型
GILS组合进近系统包含两个不同的数据来源,分别是ILS导航数据和机载接收机的GNSS数据。从ILS地面设备的更新频率是20 Hz,机载端GNSS的更新频率为1 Hz。在这项研究中,本文将提出一种方案,将这两个测量源得到的数据转移到机载处理器,用GNSS的数据校正ILS数据,计算飞机下一时刻的位置坐标,并传输到飞机自动驾驶仪。数据传输给自动驾驶仪的频率通常设定为16 Hz。组合进近系统如图1所示:
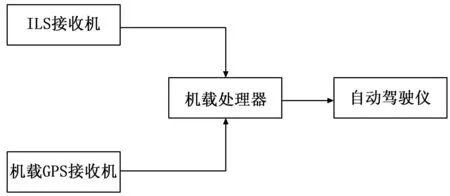
图1 GILS进近系统框图
在该系统模型中,机载处理器需对飞机的进近过程进行建模。定义ILS程序为状态量,GNSS程序为观测量。基于此,本文旨在利用GNSS的数据修正ILS的数据,且需保证校正结果区域收敛,本文提出一种新的自适应滤波算法,称为扩展自适应融合算法。
自适应滤波是一种具有抑制滤波器发散作用的滤波方法,它在滤波计算过程中,一方面利用观测值不断修正预测值,同时也对系统模型参数和噪声参数进行修正和估计。
2扩展自适应融合算法
每架次飞机都有ILS程序下的标准航图,本文的研究是基于波音737-800飞机由深圳飞往武夷山03号跑道的试飞验证数据,参照其标准进近航图,如图2所示。
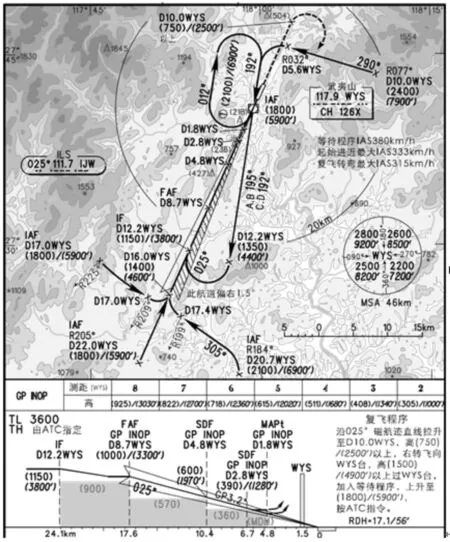
图2 ILS进近航图(波音737-800)
图2中的坐标点是基于WGS-84坐标系,需将其转换为跑道直角坐标系,坐标原点是指跑道入口点RW03C,设该点的直角坐标为(0,0);X轴正方向是原点指向WY424(N273100 E1180100);Y轴垂直于X轴,正方向是原点指向进近过程的右侧方向。
本文将标准航迹点的坐标定义为GNSS的理论值,将实际飞行的坐标定义为GNSS的实际值,利用理论值与实际值的差值的β倍来校正ILS的飞行引导,达到两个数据源融合的目的。这里β的获取,通过自适应滤波器的递推关系求得[4-6],当滤波器趋于稳定时得到的β值,对飞机进近起到最优的引导作用。本文称该算法为扩展自适应融合算法。
2.1融合算法介绍


图3 算法示意图
(1)

(2)
(3)
其中符号函数sgn满足的条件如式(4)所示:

(4)
通过实验分析,可知,任意飞行点距离标准航迹的绝对距离所对应的单位向量保持一致,仅用符号函数sgn加以区别即可。当预估计点位于标准航迹左侧即为正,反之,为负。
本文中,设每次对预估计点的偏离误差校正β倍,则可得校正向量如式(5)所示:
(5)
根据向量的求和公式,对飞机的飞行航迹进行校正后的航线向量如式(6)所示:
(6)
由此对飞机下一时刻的ILS位置进行校正,得飞机实际飞行航迹点位置坐标Xi+1=(xi+1,yi+1)如式(7)所示:
(7)
飞机进近过程中,飞行速度是不断减小的,机载端可实时采集速度矢量,考虑便于仿真,设飞机速度的大小保持不变,只改变其方向。飞机下一时刻的速度更新,如式(8)所示:
(8)
2.2融合算法分析
飞机按照ILS程序引导进近的过程中,飞行管理计算机FMS(flight management computer)输出的数据是充分考虑飞机的安全着陆及乘客的舒适度等因素,权衡各方面的影响,将最优坐标数据传输到自动驾驶仪。
充分考虑乘客的舒适度,分析ILS自动驾驶仪对飞机的进近引导数据,图1中的θ不能发生骤变,Δθ不大于90°(经验分析值),设波音737-800飞机飞行中的最小转动角度为θmin,则可得θ的约束条件如公式所示,用于自适应滤波器中β值的选定。
(9)
扩展自适应融合算法如图4所示。
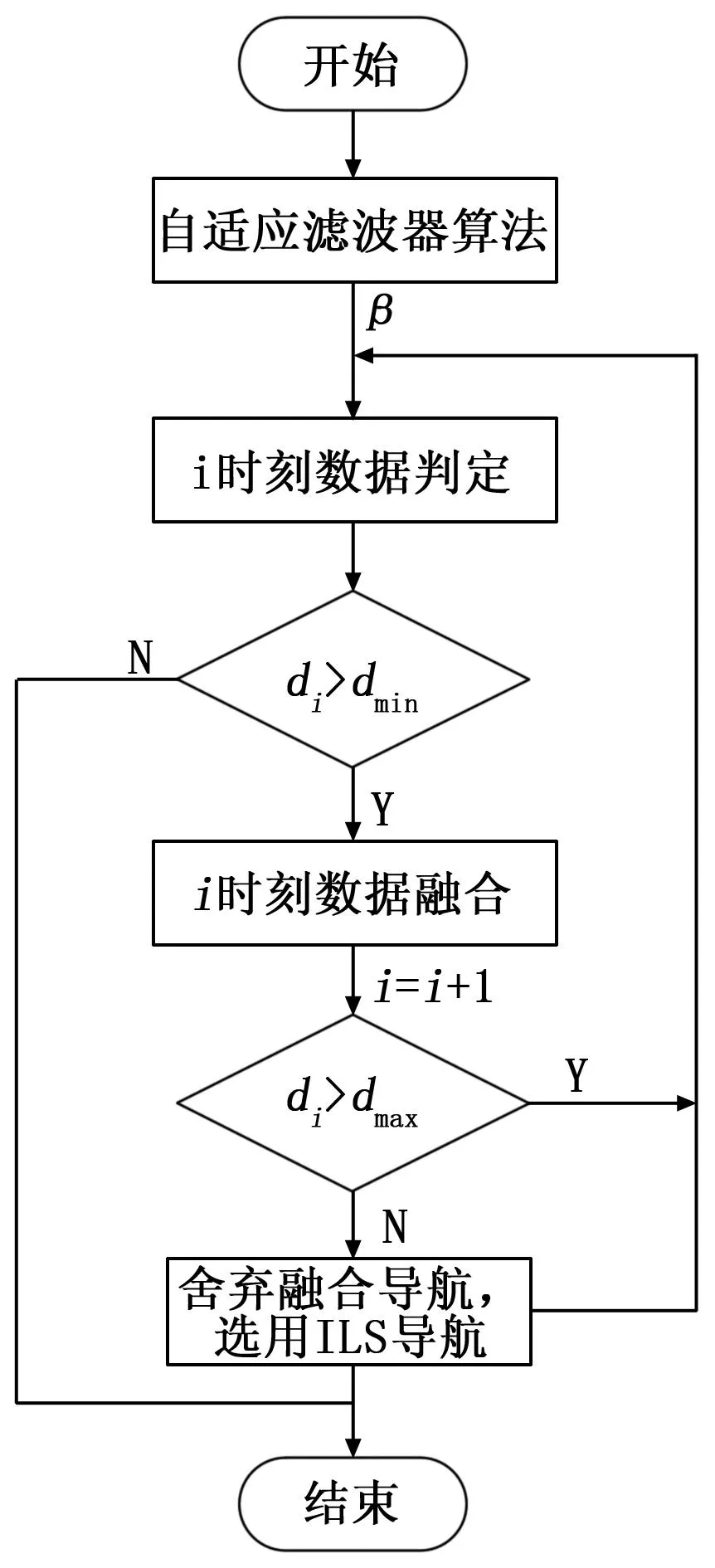

图4扩展自适应融合算法框图
3试飞验证结果及分析
在进近过程中,机组将主要注意力分配在飞行仪表上DOTS显示上,而DOTS值是通过水平精度间接而得。本文主要研究基于扩展自适应融合算法的GILS组合进近系统,即利用GNSS数据校正ILS数据,实现精密导航。所采用的测试环境以MATLAB软件平台为基础。实验论证基于某航空公司的波音737-800飞机由深圳飞往武夷山03号跑道的试验数据。如图5和图6所示。

图5 航迹比较示意图
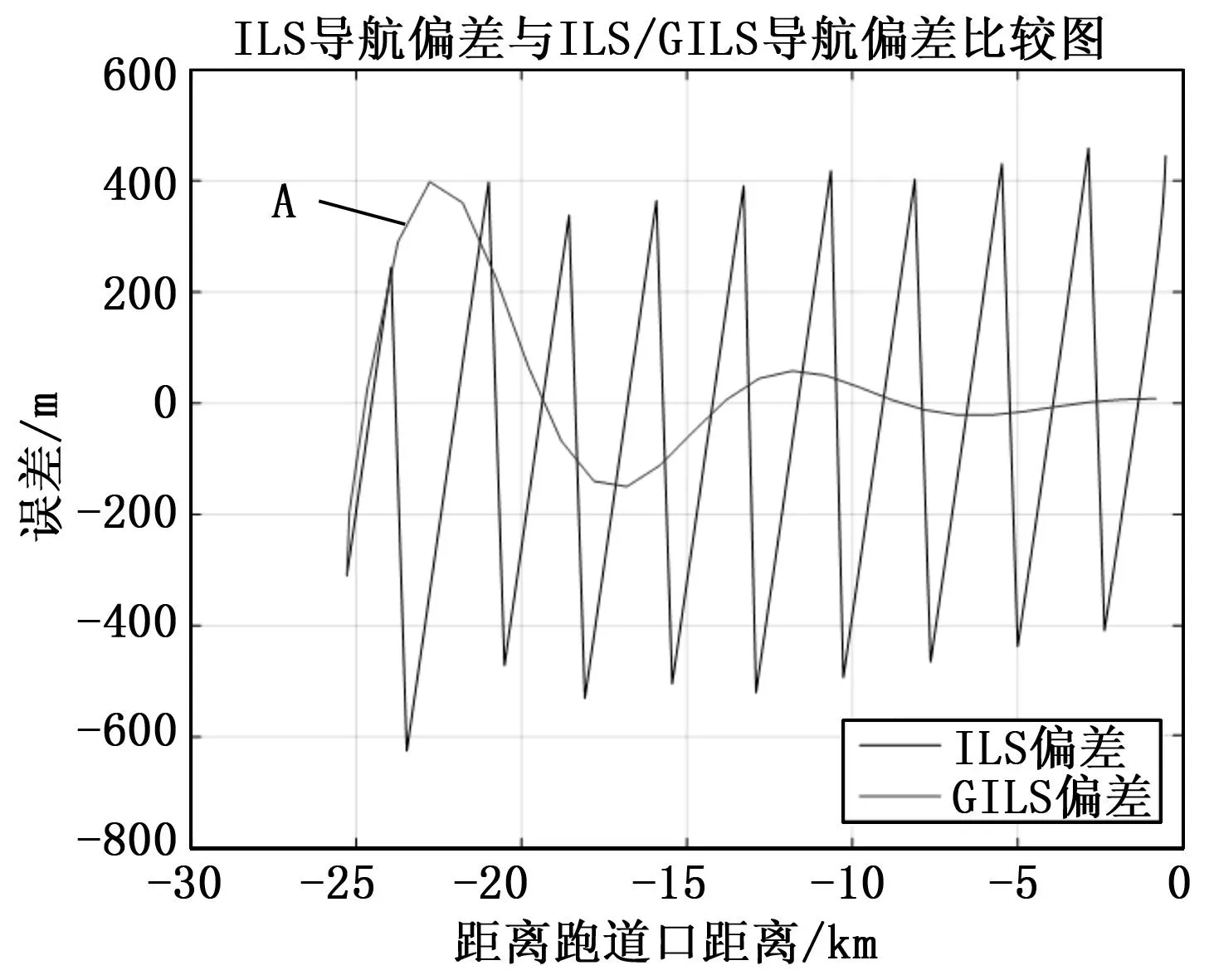
图6 进近偏差比较示意图
通过分析仿真结果可知,ILS自动驾驶仪的飞行误差是有规律分布的,当飞机偏离标准航迹线较远时,偏离误差将发生跳变,之后误差将线性变化。
图6中A线表示GILS进近偏差,可知GILS组合进近系统利用扩展自适应融合算法,可使偏离误差逐渐减小,直至收敛,逼近零,具有提高水平导航精度的能力。并且避免了误差跳变,更好得提高了乘客的舒适度。
另外一面,由图5可得,GILS组合进近系统下的飞行航迹波动更小,相同飞行速度的条件下,大大节约飞机进近的时间。
4结论
本文基于扩展自适应融合算法实现了GILS组合导航系统,将两个导航源的数据拟合成一组精度和可靠性更高的飞行航迹。
通过仿真验证,该模型可以有效地提高飞机进近过程的水平导航精度,有潜力将CAT I标准提升为类CAT II水平。并且可有效缩短飞机进近时间,提高了空域利用率。由于飞行航迹更加平滑,乘客的舒适度得到很好改善。
参考文献:
[1] Filjar R, Huljenic D, Lenac K. Enhancing performance of GNSS position estimatior by cloud-based GNSS SDR receiver architecture utilization [J]. IEEE Trans, 2013, 55(1): 315-318.
[2] SC-159, DO-245A, Minimum Aviation System Performance Standards for the Local Area Augmentation System (LAAS) [S]. RTCA, 2004: 15-17.
[3] ICAO, International Standards and Recommended Practices, Aeronautical Telecommunications, Annex 10 to the Convention on International Civil Aviation, Volume 1: Radio Navigation Aids [S]. Sixth Edition, 2006.
[4] 付梦印,邓志红,闫丽萍. Kalman滤波理论及其在导航系统中的应用 [M]. 北京:科学出版社, 2010.
[5] Daum F. Nonlinear filters-beyond the Kalman filter [J]. IEEE A&E Systems Magazine, 2005, 20 (8): 57-69.
[6] Gan Q,Harris C H. Comparison of two measurement fusion methods for Kalman-filter-based multisensor data fusion [J]. IEEE Trans. Aerospace and Electronic Systems, 2001, 37(1): 273-379.
Research on GILS Approach System Based on Extended Adaptive Fusion Algorithm
Yu Geng1, Zong Ping2
(1.School of Civil Aviation, Shenyang Aerospace University, Shenyang110136, China;2.School of Electronic Information Engineering, Shenyang Aerospace University, Shenyang110136,China)
Abstract:This paper gave a research on approach in the low visibility conditions, making full use of Global Navigation Satellite System which was autonomously controlled by our country to help the airports without updating the ground-based radio navigation equipment from Instrument Landing System Category I to Category II of the same on analogous operational standards. According to analyze the flight data of an airline, in order to improve the accuracy of the aircraft approach and the use of space zones, It introduced the model of differential Global Navigation Satellite System (GNSS) integrating with Instrument Landing System (ILS), to be considered as GILS (GNSS and ILS) approach system. It will employ the extended adaptive fusion algorithm to combine the location data of this two kinds of navigation source. It will simulate the approach path by mathematical modeling. Both the simulation and the actual flight data show this scheme can effectively improve the aircraft’s lateral navigation accuracy and the use of space zones and also has the potential to promote CAT I to CAT II.
Keywords:GNSS; ILS; GILS approach system; extended adaptive fusion algorithm
文章编号:1671-4598(2016)02-0290-03
DOI:10.16526/j.cnki.11-4762/tp.2016.02.080
中图分类号:V241.62+5
文献标识码:A
作者简介:于耕(1973-),男,陕西咸阳人,工学博士,教授,主要从事空中交通管理与航空移动通信方向的研究。
基金项目:国家自然科学基金(U1433115);中航工业产学研协同创新专项(CXY2012SH16);中国航天科技集团公司卫星应用科研创新基金项目(2014_CXJJ-TX_12)。
收稿日期:2015-09-14;修回日期:2015-10-08。
