基于惯性信息辅助的北斗动动定位方法的研究
2016-03-17徐冠楠许江宁
徐冠楠,汪 捷,许江宁
(海军工程大学 导航工程系,武汉 430033)
基于惯性信息辅助的北斗动动定位方法的研究
徐冠楠,汪捷,许江宁
(海军工程大学 导航工程系,武汉430033)
摘要:针对北斗动动定位中接收机信号易受遮挡导致无法实时准确定位的问题,对复杂信号条件下的动动定位测试进行了研究,提出了一种利用惯性信息辅助解算动态模糊度的方法,即一种将运动载体的惯导信息与北斗测量信息相结合,实现两运动载体之间精确动态相对定位的算法;通立基于载波相位双差的观测模型,采取融合滤波算法,讨论在不同卫星数目下的模糊度求解方法;在此基础上,利用实地车载试验完成了对上述组合定位方法的试验验证以及精度测试,事后着重对各历元数据进行解算,对定位精度、可用性进行了研究;结果表明,基于惯性信息辅助的北斗动动定位可用性指标变好,定位精度有一定的提高。
关键词:北斗动动定位;整周模糊度;载波相位双差;惯性信息
0引言
北斗动动定位是目前定位测量领域的研究热点和难点问题。为实现BDS的高精度动动定位需求,在实际定位时通常采用基于载波相位的定位,而基于载波相位定位技术的核心便是动态整周模糊度的在航解算(ambiguity resolution on-the-fly, AROF或OTF),整周模糊度用符号N表示。传统的动动定位容易受到信号质量影响,如接收机信号受到建筑物遮挡时,无法实时获取位置信息,因而导致无法准确实时定位。而鉴于惯性导航系统可以独立地进行导航定位,所以当导航接收机进入隧道,室内或者高楼的狭窄街道等地,在短时间内接收机无法获取卫星信号时,可以通过惯性导航定位系统辅助继续输出较为精确定位信息。
1北斗载波相位定位原理
载波相位观测量是指接收机测量所得的卫星信号载波相位与测量时刻自身产生的载波相位差值。在相位测量过程中,只能测量出不足一周的小数部分,这样一来会导致载波相位测量存在初始整周未知数的问题。通常情况下,一旦载波相位锁定之后,观测历元的整数部分可以从多普勒积分得到,而整周未知数则保持不变。因此载波相位测量的模糊度包括3个部分:
(1)

(2)
2动动定位基本模型
设移动基准站和移动站的接收机同时可以观测到n颗卫星(n>4)对其中两颗卫星i,j,在某一历元时刻可以得到任意两站1和2关于北斗B1载波的宽巷组合观测方程为:
(3)
其中:λ为载波波长,φ为载波相位观测值,ρ为站星之间的距离,N为整周模糊度,ε为载波相位观测噪声,W表示宽巷组合。
对于宽巷载波而言,关于整周模糊度的最小二乘方程为:
(4)
式中,X为基线矢量,Nαβ为组合后的双差模糊度向量,A、B分别为系数矩阵,C-1为权矩阵。假设构成组合模型的北斗频点分别是B1和B2,构成各自频点的系数为α,β。组合模糊度为Nαβ,即有:
(5)
(6)
组合之后的相位模糊度Nαβ可以根据最小二乘方法求得,由于仅有α、β一组系数,由数学关系可知无法正确求解各自的模糊度,因此如果任意寻找一组新的系数η、γ构成如同上式的组合,即可以根据下面组合方程正确求解各自模糊度NB1和NB2,求解出模糊度之后,同时可以根据(4)式反求解基线向量。
(7)
需要说明的是,在n颗可视卫星条件下(n≥2),基于载波相位差分方程的观测模型含有(n-1)个未知模糊度和3个待求的三维坐标,因此可见卫星数目必须满足大于等于四颗条件才能有效地求解。
3观测卫星条件较少条件下的模糊度解算
上述常规模糊度解算方法是基于可视卫星数目大于等于四颗条件下进行,当卫星小于四颗时无法有效地处理。针对此问题,现提出利用INS系统的输出三维信息与BDS双差信息基于卡尔曼进行滤波融合解算,具体方法是:
现假设INS导航输出的三维空间位置为Rins,在可见卫星数目小于四颗时,同样可以得到如下形式的定位方程:
(8)
需要注意的是,由于可见卫星数目不足四颗的原因,导致模糊度的变量个数小于4个,有些情况甚至只有1个,对上述组合方程利用最小二乘法解算,便可以得到模糊度浮点解,记为:N21,N21,...Nn1(N21,N21,...Nn1)。
现假设惯导输出的姿态矩阵为Cb,RI b为利用惯导输出信息解算得到的基线向量,Rb为两个动态站搭载的卫导接收机天线构成的基线在坐标系中的向量,φ为惯导平台误差角向量。利用本文算法得出的由惯导输出信息求得的基线向量为:
(9)
通过组合滤波输出的方差阵可以得出利用惯导位置计算的基线向量方差阵为:
(10)
因此由双差载波相位观测方程以及惯导输出的基线向量和方差矩阵得出模糊度向量为:
(11)
(12)
4试验验证
为验证上述方法的有效性和可靠性,2015年2月10日与武汉大学的相关试验人员一起在武汉市解放大道古田路一段足够长的15°斜坡上展开基于INS辅助的BDS动动定位测试。试验前,选取搭载有捷联惯导和卫导(天线、接收机等)组合系统的车辆作为移动站,搭载有卫导设备的车辆作为移动基准站进行动动相对测试,其中,接收机均为双频Novatel公司的BDS/GPS型,试验车辆搭载情况如图1所示。

图1 两移动站车辆及设备搭建示意图
试验过程中,移动站车辆从一个15°度左右的坡上向下驶向移动基站车辆,移动基站车辆在坡下做低速运动。试验过程中,接收机的定位模式设置为BDS/GPS双频组合定位,卫星截止高度角设置为15°,数据更新频率为1 Hz,分别采集并保存BDS和GPS数据,INS数据同样实时保存在采集器中。整个试验过程时长为1 h。

图2 两站移动轨迹
试验结束后,首先对试验采集的原始数据利用传统的双频差分对GPS和BDS分别进行解算处理,其中, BDS采用B1和B2频点,GPS则采用L1和L2频点。在对BDS进行传统的双频解算过程中,利用B1频点进行固定,部分指标结果如图3所示,其中包括利用B1(L1)搜素最佳模糊度的Ratio值和定位误差Position-error(以下简称PE),记为σ,计算公式如下:
(7)


图3 试验过程中BDS和GPS双频单历元解算部分指标结果
从图3可以看出,在观测历元的初期和后期,BDS卫星个数大于等于4颗,但是其数目变化频繁,在一定程度上影响了接收机数据的质量,导致实际能够有效解算的历元数目小于同步保存的观测历元数。 表1给出了试验过程中的GPS和BDS数据处理的部分指标结果:
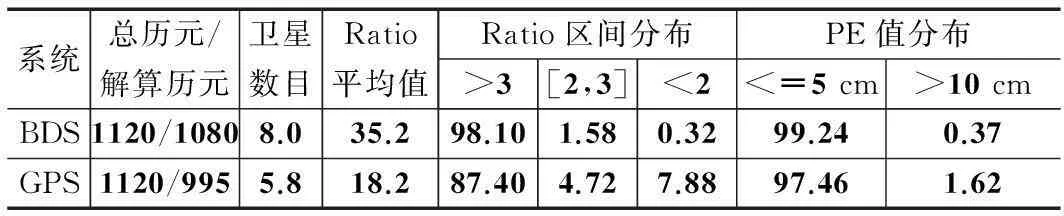
表1 试验过程中BDS和GPS处理部分指标结果
由表1可以看出,试验数据的后处理过程中, GPS实际解算历元数目只有995个,小于同步同时段保存的数据个数,相比之下BDS数据仅仅有40个无法解算,可以看出在观测条件较差时BDS数目仍可以保持较多。对于解算历元而言,BDS双频模糊度固定成功率(且认为Ratio值大于3即成功)比双频GPS高出约20%,且BDS的定位误差小于GPS的定位误差。对整个过程的解算的BDS结果进行95%的置信概率统计精度分析,可以得到水平、垂直和三维定位精度如表2所示。

表2 BDS双频单历元定位精度结果表
由表2可见,系统的水平定位精度为0.236 m,垂直定位精度为0.015 m(2 σ,95%)。
此时,为验证加入INS系统的辅助效果,利用本文提出的INS辅助BDS滤波法对试验保存的IMU数据和BDS数据进行滤波处理,将得到的各历元基线结果与后动态软件Grafnav处理的GPS结果对比,偏差如图4所示。
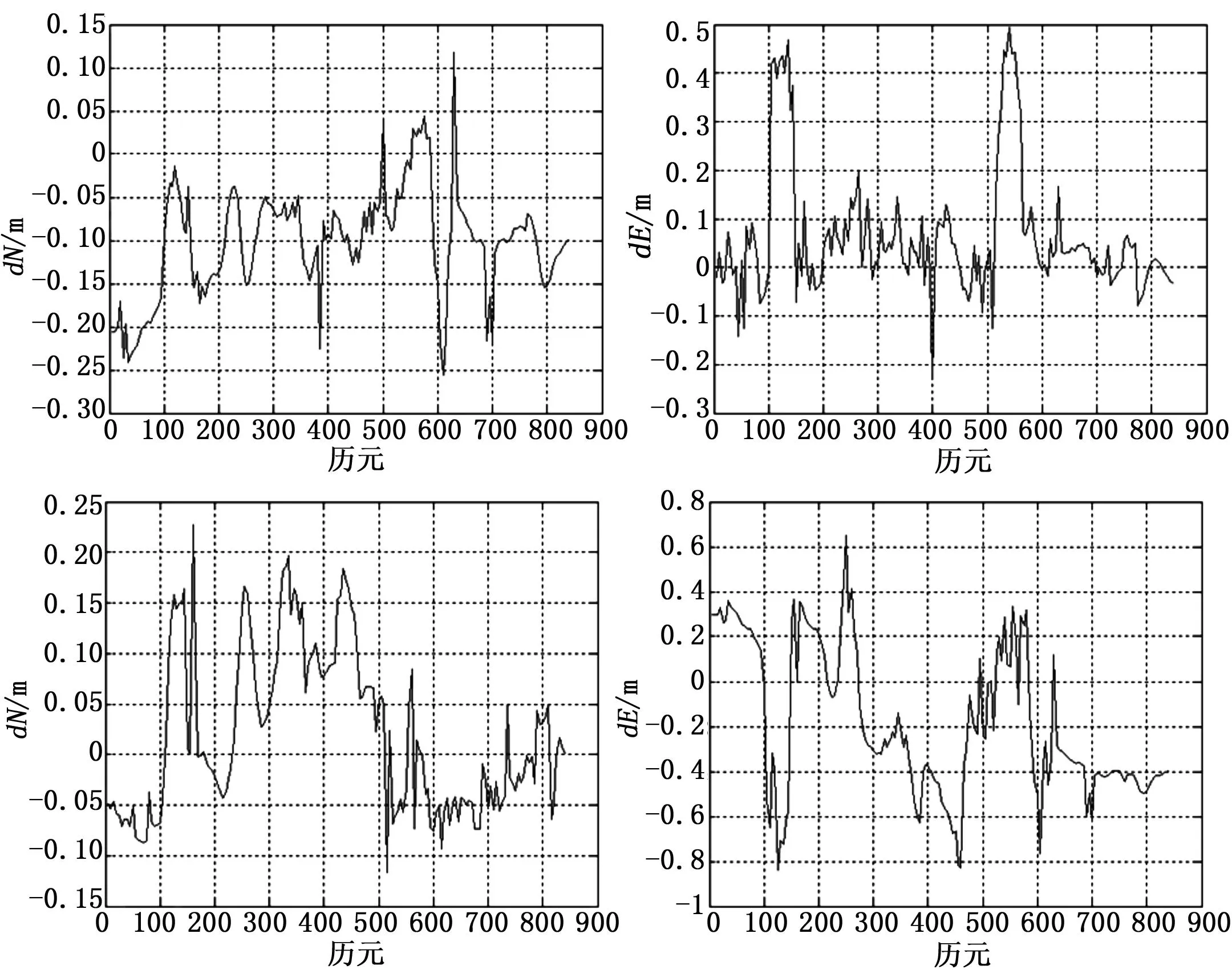
图4 INS辅助BDS解算的基线向量分量与长度误差
由图4可以看出,通过本文INS辅助BDS滤波处理得到的相对基线在N和U向偏差较小,而在E向误差较大,最大值在0.5 m左右。
同样地,对上述滤波解算结果进行95%置信概率的统计,得到N、E、U向的精度如表3所示。

表3 IMU辅助BDS动动定位精度结果表 m
结合表2和表3可以看出,通过提出INS系统辅助之后的BDS动动定位精度有一定的提高,主要体现在N和E向上,此外,IMU的辅助作用还体现在对数据中断历元的补偿和递推计算,确保了BDS定位的实时性。由表3可知,在INS系统辅助下的BDS动动定位的水平精度为0.224 m(2 σ,95%),垂直定位精度为0.014 m(2 σ,95%)。
5总结
本文通过分析不同卫星观测条件下的定位问题,分别研究相应条件下的模糊度求解模型和方法,着重对卫星数目不足时利用惯性信息辅助解算模糊度做了研究,给出了紧组合滤波求解模糊度的方法。在此基础上,搭建了组合试验系统,进行了组合系统的动动定位测试,通过以上试验结果说明,在可见卫星数目较少情况时,基于INS系统辅助的BDS动动定位效果较单BDS定位效果有明显的提高,表现在定位精度有一定的提高,实时性和可用性增强。 其中,经过INS辅助后的BDS动动定位的水平定位精度为0.224 m,垂直定位精度为0.014 m,能够满足绝大部分精度需求的应用。
参考文献:
[1] 喻国荣.基于移动参考站的GPS动态相对定位算法研究[D].武汉:武汉大学,2003.
[2] 俞文伯,高国江.单频GPS动态相对定位模糊度逼近/搜索解法[J].北京航空航天大学学报,2002,28(2).
[3] 孙红星.差分GPS/INS组合定位定姿及其在MMS中的应用[D].武汉:武汉大学,2004.
[4] 喻国荣.动对动GPS相对定位系统中整周模糊度求解[J].中国铁道科学,2003,24(4).
[5] 刘根友,朱耀仲,韩保民.GPS单历元定位的阻尼LAMBDA算法[J].武汉大学学报(信息科学版),2004,29(3).
[6] 俞文伯,高国江.单频GPS动态相对定位模糊度逼近/搜索解法[J].北京航空航天大学学报,2002,28(2).
[7] 孙红星.差分GPS/INS组合定位定姿及其在MMS中的应用[D].武汉:武汉大学,2004.
[8] 喻国荣.动对动GPS相对定位系统中整周模糊度求解[J].中国铁道科学,2003,24(4).
[9] 胡丛玮,刘大杰.单历元确定GPS整周模糊度的分析[J].南京航空航天大学学报,2001,33(3).
[10] 刘根友,朱耀仲,韩保民.GPS单历元定位的阻尼LAMBDA算法[J].武汉大学学报(信息科学版),2004,29(3).
[11] OEMV family installation and operation user manual,OEMV family firmware reference manual[EB/OL].Novatel Inc. 2006.
[12] Xu G C. GPS theory, algorithms and applications[M]. Springer-Verlag Berlin Heidelberg, New York, 2003.
[13] Jon Glenn Gjevestad Svendsen. Some properties of decorrelation techniques in the ambiguity space[J].GPS Solutions,2006(10):40-44.
Research of Beidou Move Locating by Inertial Information Auxiliary Method
Xu Guannan,Wang Jie,Xu Jiangning
(Department of Navigation Engineering, Naval University of Engineering, Wuhan430033, China)
Abstract:in view of the big dipper move positioning receiver signal vulnerable to keep out cause cannot real-time accurate positioning problem, for the move location test under the condition of complex signal are studied, this paper proposes a using inertial information auxiliary calculating method of dynamic fuzzy degree, is a kind of moving vehicle inertial navigation information combined with beidou measurement information, between the motion vector precision dynamic relative positioning algorithm. Flux based on carrier phase double difference observation model, adopt the fusion filtering algorithm, discuss the ambiguity solution under different number of satellites. On this basis, the use of field vehicle test completed the orientation of the combination method of test and precision test, later on, for each epoch data to studied the positioning accuracy and availability. Results show that based on the inertial information auxiliary beidou move positioning availability index, slightly improve the positioning accuracy.
Keywords:beidou move positioning; fuzzy degree of the whole week;carrier phase double difference;inertial information
文章编号:1671-4598(2016)02-0141-03
DOI:10.16526/j.cnki.11-4762/tp.2016.02.038
中图分类号:P228.4
文献标识码:A
作者简介:徐冠楠(1991-),男,江苏淮安人,硕士研究生,主要从事无线电导航技术及应用,对北斗导航系统定位技术有一定的研究。
基金项目:总装预研基金项目(9140A24020713JB11342);十二五预研项目(51324040103)。
收稿日期:2015-08-11;修回日期:2015-09-25。
汪捷(1973-),男,江西吉安人,副教授,主要从事无线电导航技术及应用,主要对长河二号系统授时监测等有长期的研究,发表过多篇优秀文章。
