微网中并行电压电流多环反馈的单相控制策略
2016-03-17秦铭阳刘闯姜明磊东北电力大学电气工程学院吉林吉林30国网吉林省电力有限公司经济技术研究院吉林长春30000
秦铭阳,刘闯,姜明磊(.东北电力大学电气工程学院,吉林吉林30;.国网吉林省电力有限公司经济技术研究院,吉林长春30000)
微网中并行电压电流多环反馈的单相控制策略
秦铭阳1,刘闯1,姜明磊2
(1.东北电力大学电气工程学院,吉林吉林132012;2.国网吉林省电力有限公司经济技术研究院,吉林长春130000)
摘要:三相4线制低压微网中,由于接入大量单相负荷,会导致三相不平衡;针对传统单相下垂控制策略一般将电压环电流环串联使用,提出了一种基于并行电压电流多环反馈的微网逆变器控制策略,来实现系统在三相不平衡时的独立稳定控制。该控制策略将带有电压参考值前馈补偿的电压闭环作为单相逆变器的电压整体控制,同时与电流阻尼环并行控制来提高系统的暂态性能。最后利用PSIM实验仿真系统验证了所提出的控制策略在孤网运行模式下的有效性。
关键词:三相4线制微网;下垂控制;并行电压电流环;前馈补偿;滤波振荡电流
当今全世界的焦点正在从利用化石燃料发电的大型机组转移到使用清洁能源发电的小规模机组。利用可再生能源的分布式发电机组被广泛地应用于小功率和地理位置分散的情况下进行发电[1]。美国的CERTS定义微网是由各个互联的分布式发电机组、负荷以及能量储存装置组成的一个小规模低压电网系统。
一般来说,微网在实际工作中有两种运行状态。在并网运行模式时,微网通过公共耦合点(PCC)连接到主电网,微网的电压和频率由主电网来提供支撑。在孤岛运行模式时,微网和主电网断开,微网的电压和频率则是由接口逆变器的控制策略来决定[2],因此对于微网的控制主要是对这些逆变器进行控制。下垂控制是一种典型的对等控制,适用于微网中多个并联逆变器之间的能量管理,分布式电源之间不需要通信联系就能实现合理的负荷负担,基于下垂特性的逆变器控制有很多改进型。文献[3]通过对控制器的参数设计使逆变器的输出阻抗呈感性,从而实现了逆变器在低压条件下的功率解耦控制。但是功率控制部分的输出为三相参考电压,无法在三相不平衡负荷的条件下正常工作。文献[4]将因负荷变化时导致的电压和频率偏差作为前馈量加入到功率控制环节,实现了电压和频率的二次调整。然而,当负荷突然下降时系统中会出现暂态的电压电流振荡问题。
本文首先给出了三相4线制电压源逆变器的结构并且对传统的下垂控制进行了改进,使其能够工作在低压条件下。其次,给出了并行电压电流环多环反馈的结构设计,该结构能够时刻跟踪系统电压状态变化,满足输出电压要求,并且能够削弱由突然切负荷引起的电压电流振荡问题。再次,利用Matlab分析了所选择控制参数的稳定性。最后构建了一个三相4线制微网仿真结构对所提出的控制策略进行仿真验证。
1 下垂控制的三相4线制逆变器
在孤网运行模式下,三相4线制逆变器提供不间断供电。大部分连接到三相4线制系统的负荷是单相负荷,很难保证负荷在三相上的平均分布,这种情况会导致三相不平衡的问题。针对这一问题,给出了一个新的逆变器功率控制方法。从而实现了将电压源逆变器的三相控制方法分解为单相控制方法。图1给出了三相4线制分布系统。半桥型电压源逆变器结构上可以等效为3个单相逆变器并联。因为电路的拓扑结构为零序电流提供了回路,并且三相是独立的,所以能够承担三相不平衡负荷,本文的逆变器使用这种拓扑结构。

图1 三相4线制分布式系统Fig.1 A three-phase four-wire distribution system
该逆变器的控制方法基于下垂控制特性。我们所熟知的下垂控制方法是模拟同步发电机有功、无功功率增加时频率、电压幅值降低这一特性[5],如下式所示,电压源逆变器使用这种方法来控制。

式中:f,V分别为频率和输出端电压的幅值;fref,Vref分别为频率和电压的参考值;P,Q分别为有功功率及无功功率;Pref,Qref为参考值;m,n代表下垂增益。
m,n定义如下:
式中:fmin,Vmin分别为允许的频率和电压的最小值;Pmax,Qmax为逆变器的最大容量值。
传统的下垂控制是基于同步发电机输出阻抗和线路阻抗呈感性这一特点。但是在低压配电网线路输出阻抗基本呈现阻性所以需要对传统的下垂控制进行改进,实现功率解耦控制。本文使用文献[6]的方法,通过将逆变器输出电压的频率和幅值进行正交旋转变换来达到这一目的。
2 电压电流多环反馈控制策略
根据微网三相不平衡的特点,控制的方法应该使用单相独立控制以确保工作时相互不影响。所以控制系统包括3个部分,每个部分都是1个单相控制环。1个控制环包括改进的下垂控制、电压环、电压参考值前馈补偿和电流环。现有的关于控制环的研究大部分都是将电压环和电流环串联使用[7],但是这种方法会产生稳态误差,并且很难设定PI控制器的控制参数。本文中给出的控制方法是通过并联电压电流环来实现动态调整输出电压并且改善系统暂态振荡特性。
2.1电压参考值前馈补偿的电压环设计
图2给出了带有电压参考值前馈补偿的电压闭环结构。其中V*是由下垂控制产生的电压参考值,V为逆变器的输出电压,V*和V构成闭环电压控制。V*与2/Vdc构成电压参考值的前馈补偿。闭环电压控制与前馈补偿二者叠加的作用效果使控制系统输出电压的动态调整效果相比闭环电压控制更有效,从而保证输出电压满足控制要求。二者叠加后产生的占空比dˉ送入PWM逆变器。

图2 带有参考电压前馈补偿的电压环结构Fig.2 Voltage loop plus feed-forward stationary voltage
2.2负反馈阻尼电流环设计
在暂态时,尤其是在孤网运行模式下负荷最低处,滤波器中会有振荡电流。为了提高暂态性能,控制策略中加入了1个带有负反馈的电流环。电流环的结构如图3所示,iL是电感电流,d为输送到PWM开关的占空比。电流控制环由二阶带通滤波器和PI控制器构成,二阶带通滤波器将电感电流中的高频振荡分量提取出来,在经过PI控制器后作为负反馈量与闭环电压控制和前馈补偿叠加,目的在于去除由电感电流中的高频振荡分量引起的输出电压振荡。该二阶带通滤波器的中心频率设为2 000 Hz,通频带的频率设为628 Hz。

图3 补偿滤波器谐振电流的电流环Fig.3 Current loop compensating the filter-resonance current
2.3并行电压电流多环反馈控制策略
图4给出了带有电压参考值前馈补偿并联的电压电流环结构。这里的Vref是由下垂控制产生的电压参考值,V是逆变器的输出电压。由电压闭环产生的占空比dv和电压参考值前馈补偿产生的占空比df以及负反馈电流环产生的占空比dn三者叠加而成的占空比d,将作为PWM的输入信号。

图4 基于下垂控制的并行电压电流多环控制框图Fig.4 Based on the droop control parallel voltage current multi-loop control block diagram
3 逆变器控制器的设计与分析
3.1基于下垂控制的三相4线制独立控制
三相4线制逆变器单相控制原理如图5所示。
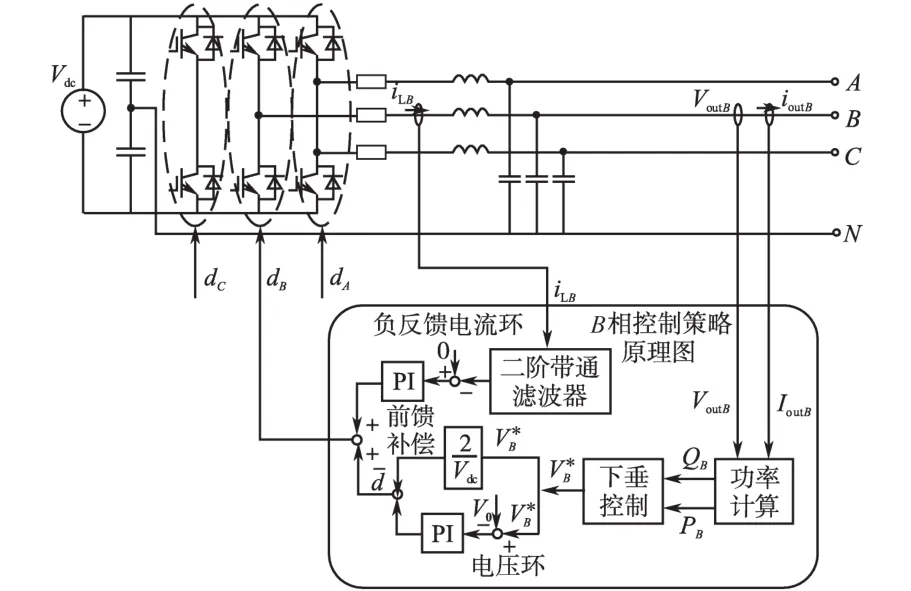
图5 逆变器控制原理图Fig.5 Schematic control method of inverter
这里用B相来说明控制策略,A相和C相的控制方法和B相一样。将检测到的逆变器B相输出电压VoutB和电流ioutB进行功率计算得到B相有功和无功功率PB,QB,根据改进的下垂特性得到B相的电压参考值V*B,之后将V*B送入带有电压参考值前馈补偿的电压环中达到单相控制的目的。
3.2控制参数及稳定性分析
图6给出了单相电压电流环半桥型逆变器的一般等效模型,相互独立的直流母线有相同的电压参考值Vdc,该模型中受控电压源dVdc/2代替了直流电压源,并且d是连续的调制控制信号。从上述各级半桥型逆变器的等效模型可以得到d遵循下面的关系式:


图6 半桥型逆变器信号部分等效模型Fig.6 The equivalent average model of single unit of half-bridge inverter
图7给出了电压电流闭环动态结构控制框图。
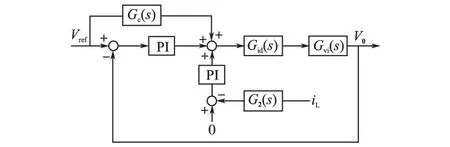
图7 系统动态结构控制框图Fig.7 Dynamic structure diagram of the control system
这里的Gvi(s)和Gid(s)是等效电源的传递函数,G2(s)为二阶带通滤波器的传递函数。由式(2)可推出方框中的传递函数关系如下式所示:

其中
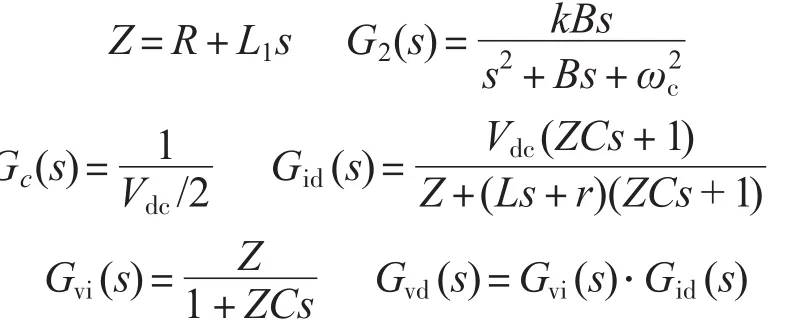
并行电压电流环的传递函数如下式所示:
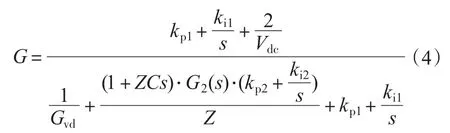
然而控制系统不仅仅要达到控制目的,还需要满足稳定性的要求。幅值裕度Gm和相角裕度Pm是衡量控制系统相对稳定的2个重要的性能指标。在Matlab中使用一些相关的指令,很容易得到它们的有效值。输出功率设为5 kV·A,10 kV·A和15 kV·A。图8给出了控制系统稳定性的分析。根据图8再结合尼奎斯特稳定判据,可知满足如下条件控制系统鲁棒稳定。Gm>0,Pm>0
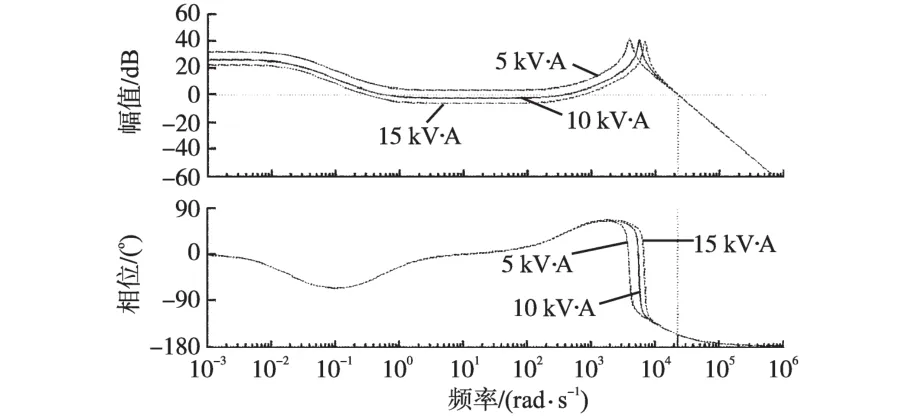
图8 控制模型稳定性分析Fig.8 Stability analysis of the proposed control system
从图8可以看出控制系统是稳定的,控制系统的参数选择是正确的。这里需要指出的是图8中在1.31e+004 rad/s处有一个波动,该点处的频率大概为2 086 Hz,这个频率也是LC振荡的频率,也可以看做是对控制系统在2 086 Hz处的一个补偿。
4 三相4线制微网实验仿真分析
一个三相4线制低压微网由3个互联的微源和3个负载组成,微网结构如图9所示。
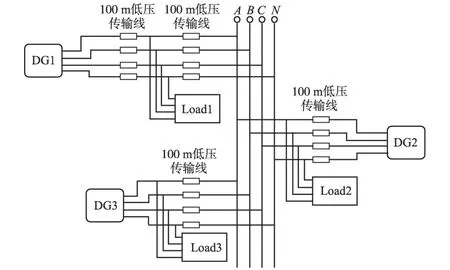
图9 三相4线制微网仿真模型Fig.9 Three-phase four-wire microgrid simulation model
控制参数如下:
滤波器,Rf=0.01 Ω,Lf=1.5 mH,Cf=10µH,开关频率fc=20 kHz,下垂控制增益m=0.015 625,下垂控制增益n=0.518 33,直流电压Vdc=750 V,分裂电容C=0.5 F,PI控制器,kp1=0.005,ki1=0.007,kp2= 0.05,ki2=0.001,微源及负荷数量n=3,微网频率fn=50 Hz,线路电阻r=0.642 Ω/km,线路电抗x= 0.083 Ω/km。
每个微源单元都使用15 kW的半桥型逆变器。为了验证所给出的控制策略有效性,在三相不平衡的条件下进行模拟仿真。
B相和C相在初始阶段设定各自的有功功率为8 kW,无功功率为6 kvar,A相的有功功率为12 kW,无功功率为9 kvar,在0.2 s时,A相切除4 kW的有功功率和3 kvar的无功功率,模拟在负荷改变和三相平衡条件下的情况。仿真的运行时间为0.3 s。
4.1负荷变化时振荡分析
当微网的负荷改变时,尤其是当负荷减小时。逆变器的输出功率要大于负荷功率,电流会导致LC滤波器在负荷下降时发生振荡。
这里用A相作为示例来分析振荡。A相的初始阶段相应的有功功率为12 kW,无功功率为9 kvar,在0.2 s时,切除4 kW的有功功率和3 kvar的无功功率。0.2 s到0.214 9 s这一时间段发生了振荡,在0.200 4 s时电压波形达到了峰值475 V。振荡的频率近似为2 000 Hz。图10给出了0.2 s时的振荡情况。

图10 负荷下降时的振荡Fig.10 Oscillation at the step-down condition
传送到逆变器的占空比,如图11所示由3个部分组成。参考电压前馈补偿产生的占空比df保证了输出电压的平稳。由电压环产生的占空比dv会受负荷改变产生波动。可以看出在切除负荷的时间里,由负反馈电流环产生的占空比dn,会提供1个负的有效值用以抵消dv产生的振荡部分。
负反馈电流环的补偿效果如图12所示,振荡的抑制效果是显而易见的。
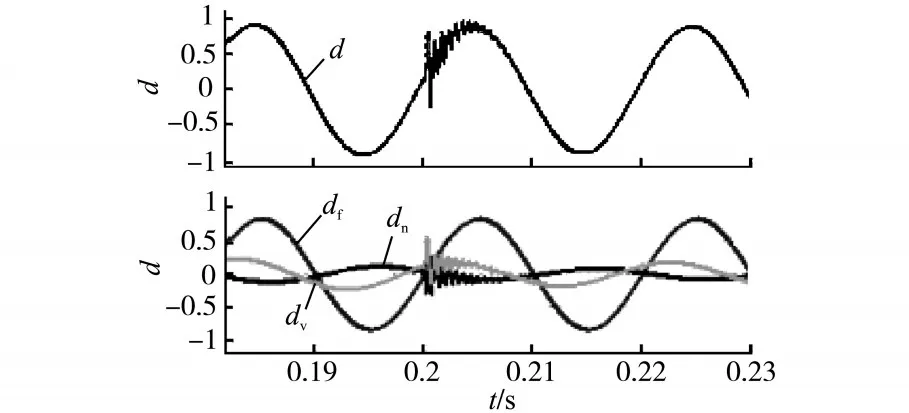
图11 传送到逆变器的占空比Fig.11 Duty ratio delivered to the inverter
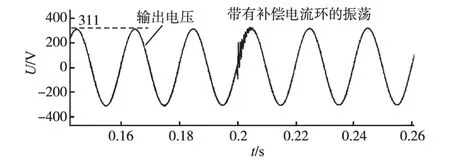
图12 电流环补偿后的电压波形Fig.12 Voltage waveform with the compensating current loop
4.2负荷切除时间的分析
从上面的讨论可以知道,当0.2 s切除负荷时,因为多余的电流存在导致振荡发生。应该指出的是,切除负荷的时间也会影响到振荡的强度。如图13所示。从图13中可以看出电感电流的波形呈正弦。在时间t1处切除负荷时,电感电流的有效值变为0,并且在LC滤波器中不会有振荡出现,其中t1=0.201 2 s。

图13 电感电流和负荷切除时间Fig.13 Inductance current and the cut off time of the loads
如图14所示,在t2处切除负荷,则电感电流的有效值将达到最大值。这种情况下,电感器中会产生一个强烈的振荡,其中t2=0.206 2 s。
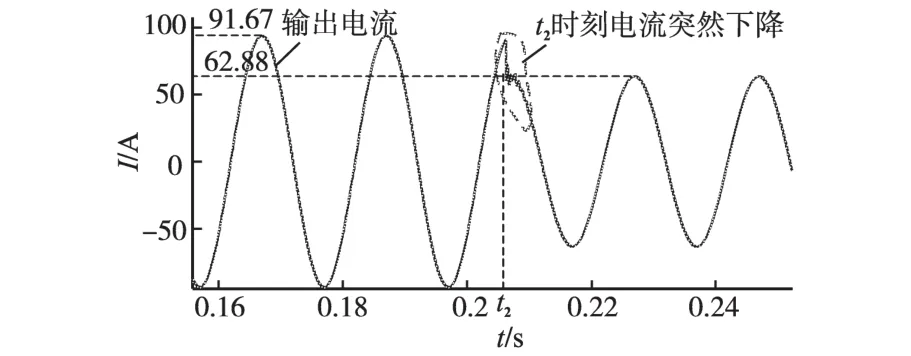
图14 在t2处切除负荷时的输出电流波形Fig.14 Output current waveform when the loads are cut off at t2
4.3三相4线制低压微网的运行
从以上的讨论可知,负荷的切除时间应该设为0.201 2 s,这样可以减少振荡的强度。在0 s到0.201 2 s之间,三相负荷不平衡,依据下垂控制的调整,A相参考电压要低于B相和C相的参考电压。为了避免三相电压不平衡导致三相功率不平衡并且补偿下垂控制产生的电压偏移,将输出电压和参考电压的差值送入下垂控制中,对电压偏移量进行补偿[8]。
图15给出了加入补偿环后下垂控制产生的电压参考值。

图15 加入补偿后三相电压参考值Fig.15 Three-phase voltage references generated by the droop control plus the compensation
在稳态阶段,负荷是平衡的,低压网的三相输出电压和三相输出电流如图16所示。
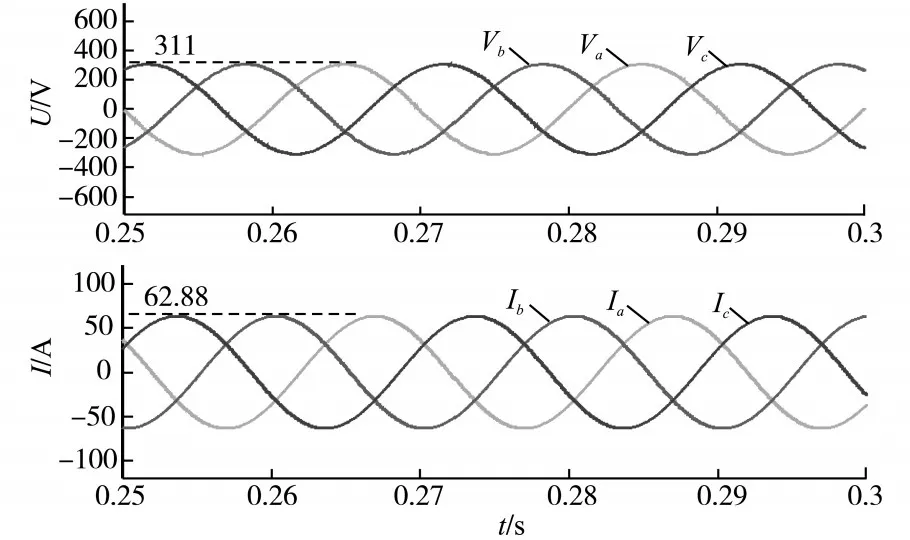
图16 0.25 s到0.3 s稳态下的三相输出电压和电流Fig.16 Output three-phase voltages and currents at steady state from 0.25 s to 0.3 s
由图16可以看出,三相输出电压的峰值311±5 V,很好地满足了电压控制要求。输出的三相电流也是平衡的,峰值为62.88 A。
图17给出了在切除前后的三相电压和三相电流。如图在A相负荷切除之前,三相功率是不平衡的,A相电流增加,其峰值明显高于B相和C相。并且输出电流平稳,没有任何振荡和谐波。在下降的时间段里,输出电压有轻微的振荡。滤波效果明显且有效,所给出的控制策略是有效的。
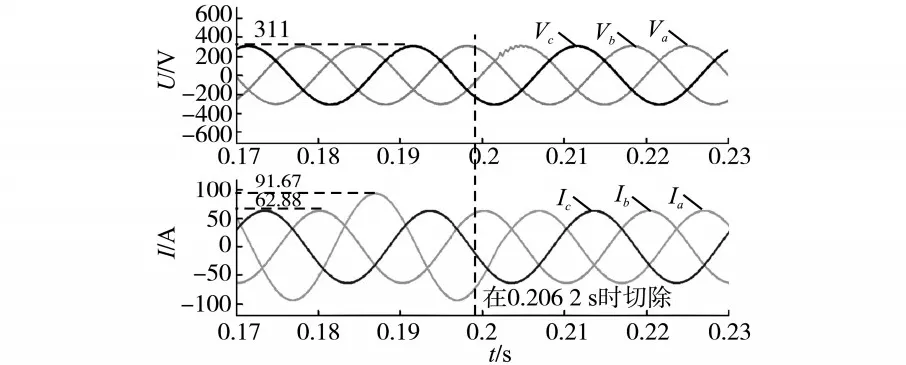
图17 0.17 s到0.23 s切除前后的三相电压电流Fig.17 Three-phase voltage and current waveforms around the cut-off time from 0.17 s to 0.23 s
5 结论
根据三相4线制微网的特点,提出了一个带有电压参考值前馈补偿的并行电压电流环改进型微网控制策略,该策略可以用来解决三相不平衡以及切负荷所带来的电压电流振荡问题。利用PSIM仿真得到的实验结果证实了所给出的控制策略在三相4线制微网中的有效性。
参考文献
[1]王成山,王守相.分布式发电供能系统若干问题研究[J].电力系统自动化学报,2008,32(20):1-4,31.
[2]Josep M,Guerrero,Jose Matas. Wireless Control Strategy for Parallel Operation of Distributed Generation Inverters[J]. IEEE Transactions on Industrial Electronics,2006,53(5):1461-1470.
[3]王成山,肖朝霞.微网中分布式电源逆变器的多环反馈控制策略[J].电工技术学报,2009,24(2):100-107.
[4]张明锐,杜志超,黎娜,等.高压微网孤岛运行时频率稳定控制策略研究[J].中国电机工程学报,2012,32(25):20-26,6.
[5]Juan C Vasquez,Josep M Guerrero,Alvaro Luna. Adaptive Droop Control Applied to Voltage-source Inverters Operating in Grid-connected and Islanded Modes[J]. IEEE Transac⁃tions on Industrial Electronics,2009,56(10):4088-4096.
[6]陈可,苏建徽,刘文涛.一种改进的逆变器并联功率解耦控制策略[J].电气传动,2013,43(1):25-28,38.
[7]李国庆,王星宇,王鹤.微电网中分布式电源逆变器数字多环反馈控制方法[J].东北电力大学学报,2014,34(1):40-46.
[8]Josep M Guerrero,Jose Matas,Miguel Castilla,et al. Hierar⁃chical Control of Droop-controlled AC and DC Microgrids-A General Approach Toward Standardization[J]. IEEE Transac⁃tions on Industrial Electronics,2011,58(1):158-172.
修改稿日期:2015-08-02
Voltage-current Multiple Feedback Loops in Parallel Control Scheme for Single-phase Inverters in Microgrid
QIN Mingyang1,LIU Chuang1,JIANG Minglei2
(1. Electric Institute,Northeast Dianli University,Jilin 132012,Jilin,China;2. Power Economic Research Institute of Jilin,Changchun 130000,Jilin,China)
Abstract:In the three-phase four-wire microgrid,the large amount of single-phase load will always cause three phase imbalance. According to the traditional droop-controlled single-phase inverters using the voltage-current control loops in series,a novel voltage-current multiple-feedback loops in parallel control scheme was proposed for the microgrid to realize the stable three-phase unbalance control independently. The control strategy of closed loop with a reference voltage feed-forward compensation voltage as single phase inverter voltage control,at the same time of parallel current damping control to improve the transient performance of the system.By the end of the article using PSIM simulation system to verify the effectiveness of the proposed control strategy in microgrid islanded operation.
Key words:three-phase four-wire microgrid;sroop control;voltage-current loops in parallel;feed-forward compensation;filter-resonance current
收稿日期:2015-04-04
作者简介:秦铭阳(1989-),男,硕士研究生,Email:594676004@qq.com
中图分类号:TM464
文献标识码:A
