双轴旋转式激光捷联惯导系统的转位方案研究
2016-03-16陈家斌韩勇强宋春雷王明杰
秦 冲,陈家斌,韩勇强,宋春雷,王明杰
(北京理工大学 自动化学院,北京 100081)
双轴旋转式激光捷联惯导系统的转位方案研究
秦 冲,陈家斌,韩勇强,宋春雷,王明杰
(北京理工大学 自动化学院,北京 100081)
惯性导航系统的误差随时间累积,旋转调制技术可以有效地提高惯导系统的长航时精度,旋转调制方案是决定旋转式捷联惯导系统导航精度的一个重要因素。针对双轴旋转惯导系统,相较于16次序转位方案,提出了一种新的32次序双轴旋转调制方案。根据捷联惯导系统的误差方程,推导出旋转捷联惯导的误差方程,分析了误差补偿的机理,研究了惯性器件常值偏置误差、标度因数误差和安装角误差的传播特性。仿真结果表明,32次序双轴旋转调制方案相对于16次序转位方案有明显的优势,可以有效地降低姿态角误差和经纬度误差。
捷联惯导系统;激光陀螺;旋转调制方案;误差补偿
0 引言
旋转调制技术是一种误差自补偿技术,利用IMU周期性转动完成对惯性器件误差的调制,从而提高导航系统的精度。目前,国外双轴旋转式激光捷联惯性导航系统已经大量装备于海军舰船,Sperry公司的MK49型双轴旋转式激光陀螺捷联惯导系统经过海试,被选为北约的标准船用惯导系统,装备了大量的舰艇。在MK39/49基础上,Sperry公司发展了AN/WSN-7系列双轴旋转式激光陀螺捷联式惯导系统,重调周期可达14d,成为美国海军舰艇的新一代标准惯性导航系统,更高精度的激光陀螺旋转调制系统正在研制中[1-2]。国内,在2000年左右误差自补偿技术的研究才开始被重视起来,在双轴旋转惯导系统调制机理、高精度IMU设计、转位机构设计和转位方案设计方面也取得了一定的成果。
目前,公开资料上很难找到MK-49、AN/WSN-7A等国外双轴旋转系统所使用的旋转方案[2]。转位方案是影响双轴旋转惯导系统导航精度的重要因素,不同的转位方案将会产生不同的调制效果。文献[4]在静电陀螺平台翻滚方案的基础上,提出了旋转式系统的8次序双轴转位方案,并进一步提出了16次序双轴转位方案。文献[5]研究了转位机构的调制角速度、时间参数设置问题,指出调制角速度应设置在15(°)/s以下,不同的调制方案,调制角速度选择不尽相同,须进行比较分析。文献[7]提出了一种改进的16次序双轴交替旋转调制方法,进一步抑制了速度误差积累所引起的位置误差。文献[8]在比较16次序转位方案和64次序转位方案基础上,提出了改进的64次序双轴转位方案,有效地提高了系统的导航精度。文献[14]在16次序转位方案基础上,将每次180°的旋转改为两次90°的旋转,在每个位置停留相同时间来补偿二次谐波误差,从而构成了一个32次序的双轴转位方案。
本文综合考虑以上研究内容,以双轴旋转捷联惯性导航系统为研究对象,从旋转调制型激光捷联惯性导航系统的基本原理出发,提出了一种新的32次序双轴转位方案,可以对惯性器件的常值误差、标度因数误差和安装角误差进行有效的补偿,可有效地提高导航精度。
1 旋转调制原理
旋转调制型激光陀螺捷联惯性导航系统是在激光陀螺捷联惯性导航系统的外面加上转动机构和测角装置,导航解算采用捷联惯性导航算法,计算出IMU的姿态,并根据IMU相对于载体的转动角度,从而转化得到载体的姿态信息[5]。旋转调制原理框图如图1所示。
以传统正交安装的IMU为研究对象,IMU固联在旋转机构上,旋转机构绕相互正交的坐标轴旋转,构成一个新的旋转坐标系。定义:s系为旋转坐标系;b系为载体坐标系;n系为导航坐标系;i系为惯性坐标系。初始时刻旋转坐标系与载体坐标系重合。

图1 旋转调制原理框图Fig.1 Principles of rotation strap-down algorithm
惯性元件的输出描述如下:
(1)

(2)

由式(1)、式(2)展开,略去二阶小量,可推出惯性元件的输出误差方程:
(3)
δfs=(δKa+δMa)fs+▽
(4)
根据捷联惯性导航系统的误差方程,结合旋转捷联解算框图,推出旋转惯性导航系统的误差传播方程如下:

(5)
(6)
(7)


2 旋转调制方案设计与分析
单轴旋转调制系统只能消除与旋转轴垂直方向上的惯性器件偏差,旋转轴方向上的器件误差依然会引起惯性导航系统的误差[6],而双轴旋转调制系统可以完全调制3个方向上的常值陀螺漂移。在旋转过程中,IMU在每个位置驻停时间越短,惯性器件误差的调制效果越好,因此可采用绕水平轴和天向轴的连续转位方案,实现3个方向上惯性器件偏差的调制。
2.1 旋转调制方案的设计
目前,采用较多的是16次序的双轴转位方案,此方案中的转位机构转角可达720°,如表1所示。

表1 16次序双轴转位方案
为了改善16次序转位方案中转角过大问题,提高系统的导航精度,从而设计了一种32次序的转位方案。一个合理的双轴旋转方案设计原则应满足:绕水平轴和天向轴周期性的交互旋转,绕每个轴的旋转均具有正反性和对称性;在一个转动周期内,惯性元件引起的累计角度误差和速度误差应为0。文献[9]指出,在一个小的旋转周期内,每一对同轴旋转的转动方向须相同,每一对异轴旋转的转动方向须相反。
本文根据上述规则,通过调整转位次序,设计了32次序的转位方案,每8个次序为一个小周期,每16次序奇对称,每32次序偶对称,调整后的32次序方案转角在-180°~+180°,转位机构水平轴的转动过程中可以省掉滑环,从而提高系统的稳定性。转位次序如表2所示。

表2 32次序双轴转位方案
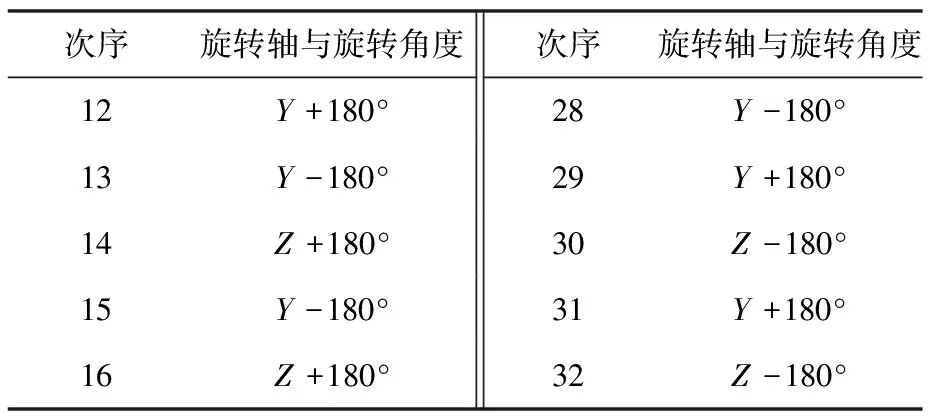
续表
2.2 惯性器件常值误差调制
这里,只讨论在一个小周期8次序内的情况,设转动过程的时间为Ts。
次序1、3、6、8绕z轴转动过程中,陀螺漂移在载体坐标系x轴的投影经过积分后结果为:
(8)
(9)
(10)
(11)
同理,陀螺漂移在载体坐标系y轴的投影经过积分后的结果为:
(12)
(13)
(14)
(15)

(16)

(17)
次序2、4、5、7绕y轴转动过程中,x、z轴陀螺漂移在载体坐标系中呈现正反各一周的变化规律,整周期内积分产生的常值偏置为0,即:

(18)

(19)
32次序的转动方案由8次序小周期组成,每16次序奇对称,每32次序偶对称,因此32次序转动方案中,陀螺漂移完全调制。同理,加速度计的常值偏置误差也可以完全调制。
2.3 惯性器件标度因数误差调制
32次序转动方案主要为绕z轴和y轴进行旋转,这里只分析绕z轴和绕y轴的转动情况。
设初始时刻导航坐标系与载体坐标系重合,绕z轴正向旋转,导航坐标系下由于标度因数误差存在导致陀螺仪输出误差为

(20)
由于陀螺仪标度因数误差引起的姿态角误差:
(21)
(22)
(23)
设初始时刻导航坐标系与载体坐标系重合,绕y轴正向转动,由于陀螺标度因数误差引起的姿态角误差为
(24)
由式(21)~式(24)可以得到,标度因数误差引起的姿态角误差在导航坐标系下水平东向的误差为0。在水平北向和天向方向上均产生了常值偏差,姿态角误差大小与旋转角速度和标度因数大小有关。
2.4 惯性器件安装误差调制
设初始时刻导航坐标系与载体坐标系重合,绕z轴正向旋转,导航坐标系下由于安装误差导致的陀螺仪输出误差为
(25)

(26)

(27)
由式(26)、式(27)得到,陀螺安装误差经过调制不能消除姿态角误差的积累,出现了安装误差与地球自转角速度分量耦合。
3 仿真结果与分析
对上述16次序转位方案和32次序转位方案进行仿真验证。仿真条件设置如下:陀螺常值漂移0.01(°)/h,陀螺的刻度系数误差为1×10-5,陀螺安装误差为10″,加速度计常值偏置为50μg,加速度计刻度系数误差为5×10-5,加速度计安装误差角为10″,初始位置误差、速度误差、初始对准误差均为0,旋转角速度设置为10(°)/s,忽略高度误差。
在32次序和16次序完整周期内,只考虑陀螺常值漂移情况下的实验仿真结果如图2和图3所示。
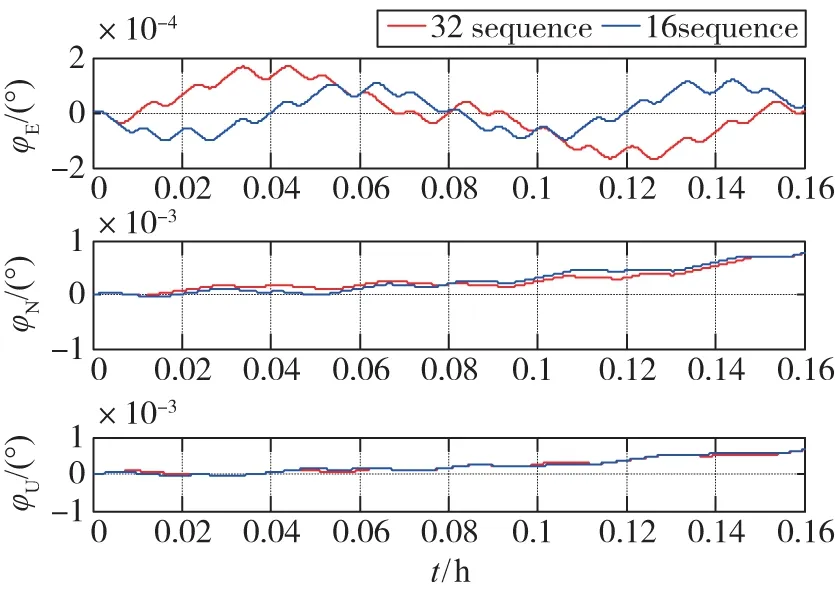
图2 16次序和32次序转位方案导航姿态角误差Fig.2 Navigation output attitude angle errors in different schemes

图3 16次序和32次序转位方案导航经纬度误差Fig.3 Longitude and latitude errors of navigation output position in different schemes
在32次序和16次序完整周期内,只考虑陀螺标度因数误差情况下的实验仿真结果如图4和图5所示。

图4 16次序和32次序转位方案导航姿态角误差Fig.4 Navigation output attitude angle errors in different schemes

图5 16次序和32次序转位方案导航经纬度误差Fig.5 Longitude and latitude errors of navigation output position in different schemes
考虑陀螺仪和加速度计的所有误差,并考虑长航时情况下的导航误差情况,设置了80h的仿真时间,仿真结果图如图6和图7所示。

图6 16次序和32次序转位方案导航姿态角误差Fig.6 Navigation output attitude angle errors in different schemes

图7 16次序和32次序转位方案导航经纬度误差Fig.7 Longitude and latitude errors of navigation output position in different schemes
仿真结果中,图2和图3表明16次序转位方案和32次序转位方案对姿态角误差调制区别较小,虽然32次序东向姿态角误差峰值稍大,但纬度误差明显减小。图4和图5中显示32次序转位方案中东向姿态角误差和北向姿态角误差明显的减小,经纬度误差也有明显的减小。图6和图7表明,考虑所有误差情况并在长航时状态下,32次序转位方案相较于16次序转位方案,姿态角误差和经纬度误差都有了较明显的减小,导航精度有所提高。
4 结论
本文以双轴旋转惯性导航系统为研究对象,为了提高双轴旋转调制系统的精度,针对16次序转位方案,提出了32次序的调制方案。文章分析研究了旋转过程中惯性器件常值误差、标度因数误差、安装误差的传播特性,分析表明了绕水平轴和天向轴旋转可以有效地调制惯性器件常值偏差,但是标度因数误差和安装误差不能被完全调制。通过仿真验证,32次序转位方案可以有效地提高惯性导航系统的导航精度,有一定的工程应用价值。
[1] Hibbard R, Wylie B, Levison E.Sperry marine MK-49, The world’s best ring laser gyro ship’s inertial navigation system[C].JSDE Proceedings, 1996: 35-46.
[2] Tucker T, Levinson E.The AN/WSN-7B marine gyrocompass navigator[C].Proceedings of the 2000 National Technical Meeting of the Institute of Navigation.London, 2000: 348-357.
[3] 孙骞.双轴旋转式光纤陀螺捷联惯导系统技术[D].哈尔滨工程大学,2013.
[4] 袁保伦.四频激光陀螺旋转式惯导系统研究[D].长沙:国防科学技术大学,2007.
[5] 王庭军.旋转式捷联惯导系统关键技术研究[D].哈尔滨工程大学,2013.
[6] 毛玉良.激光陀螺捷联惯导系统误差辨识与修正技术研究[D].北京理工大学,2014.
[7] 刘洁瑜,蔚国强,杨建业.双轴连续旋转激光捷联惯导误差高精度补偿方法[J].系统工程与电子技术,2015,37(1):148-154.
[8] 魏国.二频机抖激光陀螺双轴旋转惯性导航系统若干关键技术研究[D].长沙:国防科学技术大学,2013.
[9] 于飞,阮双双.光纤捷联惯导系统的双轴旋转调制方案[J].哈尔滨工程大学报,2014,35(12):1536-1542.
[10] 孙伟,初婧,李瑞豹,张媛.旋转惯导系统中IMU转停时间分配技术研究[J].压电与声光,2014,36(2):225-229+233.
[11] Levinson E.Accuracy enhancement techniques to the marine ring laser inertial navigation[J].Navigation, 1987, 34 (1): 64-87.
[12] 尹洪亮,杨功流,宋凝芳,王丽芬.旋转激光陀螺惯导系统误差传播特性分析[J].北京航空航天大学学报,2012,38(3):345-350.
[13] 陆志东,王晓斌.系统级双轴旋转调制捷联惯导误差分析及标校[J].中国惯性技术学报,2010,18(2):135-141.
[14] 张鹏.激光陀螺捷联惯导系统旋转调制技术研究[D].哈尔滨工业大学,2010.
Research on Rotating Scheme for Dual-Axis Rotation Laser SINS
QIN Chong, CHEN Jia-bin, HAN Yong-qiang, SONG Chun-lei, WANG Ming-jie
(School of Automation,Beijing Institute of Technology,Beijing 100081,China)
The error of inertial navigation system has the characteristics of accumulation over time.However, error rotating compensation method can effectively improve the long-time navigation accuracy.And the rotating scheme of the turntable is an important factor to determine the precision of rotary SINS.Based on the dual-axis rotating SINS, compared with the sixteen sequence dual-axis indexing scheme, a thirty-two sequence indexing scheme is put forward to modulate the inertial instrument errors better.By deriving the error model of strap-down inertial navigation system and analyzing the navigation propagating function, the mechanism of error rotating compensation is described in detail.And the propagation characteristics of inertial sensor errors, scale factor errors and installation errors are also studied.The simulation results show that the thirty-two sequence dual-axis indexing scheme has obvious advantages when compared with the sixteen sequence dual-axis indexing scheme.And it can effectively reduce the amplitude of attitude angle errors and longitude and latitude errors.
Strap-down inertial navigation system; Ring laser gyroscope; Rotation modulation scheme; Error compensation
10.19306/j.cnki.2095-8110.2016.04.004
2016-04-08;
2016-05-05。
国家国防基金(9140A09050313BQ01127);国家自然科学基金(91120010)
秦冲(1991-),男,硕士,主要从事惯性导航方面的研究。E-mail:qinchongbit@126.com
U666.1
A
2095-8110(2016)04-0019-06
