基于无人船的大洋中尺度涡观测系统展望*
2016-03-15范聪慧魏传杰
范聪慧 于 非 南 峰 魏传杰 任 强
(中国科学院海洋研究所 海洋环境工程技术研究发展中心, 青岛 266071)
基于无人船的大洋中尺度涡观测系统展望*
范聪慧 于 非①南 峰 魏传杰 任 强
(中国科学院海洋研究所 海洋环境工程技术研究发展中心, 青岛 266071)
中尺度涡在大洋中普遍存在, 研究发现, 其能量比大尺度海洋环流的能量大一个量级, 在海洋物质能量输运和全球气候变化中起着重要作用。受观测条件限制,目前对中尺度涡的观测主要通过卫星高度计实现, 只能从海面高度来推算中尺度涡大小、分布、强度及其伴随的水体和能量输送, 而卫星高度计对中尺度涡垂直结构特征认识不足, 也导致了对中尺度涡所引起的上层海洋能量、热量输送估计误差偏大。目前, 对中尺度涡三维结构观测认识不足, 展望未来将会出现基于无人船平台的大洋中尺度涡三维结构自动观测系统, 该平台将集成自动水下剖面观测功能等先进技术, 以便观测中尺度涡的垂直结构特征及其时空变化特征, 进而系统地认识中尺度涡带来的物质和能量输送。
无人船; 中尺度涡; 海洋自动剖面观测
海洋中尺度涡是一种以长期封闭环流为主要特征, 时间尺度在数天至数月之间, 空间尺度在数十千米至数百千米之间的海洋现象(Chelton and Schlax, 1996; 王桂华等, 2005)。中尺度涡在大洋中是普遍存在的, 研究发现, 其能量比大部分海域平均环流能量大一个量级(Chelton et al., 2007)。中尺度涡对大洋环流、海洋水团分布、海洋能量平衡、热盐和营养物质输送等都具有重要意义(Chelton et al., 2011; Xiu et al., 2011; Dong et al., 2014; Xu et al., 2014; Zhang et al., 2014b)。根据旋转方向和温盐结构的不同, 中尺度涡可以分为气旋涡和反气旋涡两种。在北半球, 气旋涡逆时针旋转, 涡中心为上升流, 温盐和密度等值线上翘, 水温较周围低, 因而又称为冷涡; 反气旋涡则顺时针旋转,涡中心为下降流, 海面高度比周围高, 温盐和密度等值线下凹, 中心水温较周围高, 因而又称为暖涡(李立, 2002; 程旭华和齐义泉, 2008)。由于海水辐散作用, 气旋涡中心海面高度比周围低; 而由于海水辐聚作用, 反气旋涡中心海面高度比周围高。因此, 可以用海面高度来判定海洋中的中尺度涡, 图1(见文后彩图)是卫星高度计观测的海面高度和计算的地转流场, 从图1中可以看到大洋中中尺度涡无处不在。
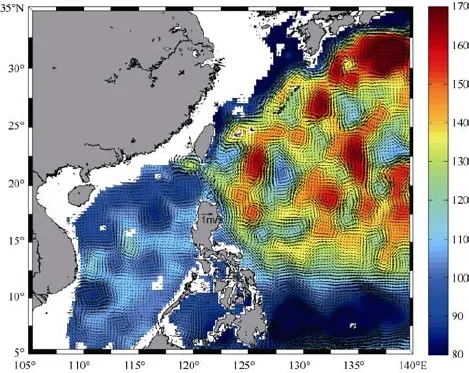
图1 卫星高度计观测的海面高度和计算的地转流场Fig.1 Sea surface height and geostrophic current calculated by satellite altimeter observations
1 大洋中尺度涡观测存在的问题
自20世纪90年代以来, 所积累的20多年的全球卫星高度计海面高度资料为学者研究中尺度涡提供了前所未有的基础资料。中国近海的中尺度涡研究主要集中在南海, 且随着现场观测资料的积累和卫星观测海面高度资料的应用, 南海中尺度涡研究涌现出了大量成果(Chu et al., 1998; Li et al., 1998; Morimoto et al., 2000; Chu and Fan, 2001; Wang et al., 2003; Chen et al., 2010; Hu et al., 2011)。统计分析结果显示, 南海东北部和越南东部是中尺度涡的高发区和南海中尺度涡动能的高值区(Hwang and Chen, 2000; He et al., 2002; Xiu et al., 2010; Chen et al., 2011; Nan et al., 2011a)。李立等(1997)和Li等(1998)利用1994年观测数据, 在南海东北部大陆坡外捕获一反气旋型的黑潮分离流环, 该流环为中心位于21°N, 117.5°E, 直径约为150km, 垂直尺度超过 1000m 的反气旋, 其近表层流速接近1m/s。王胄和陈庆生(1987)在台湾西南部观测到一个从黑潮流套中脱离出来的反气旋暖涡。Jia和Liu(2004)利用卫星高度计资料和模式输出资料得出不断有反气旋涡从黑潮流套中脱离出来, 反气旋涡脱离周期为 70~ 90d, 脱离位置大多在 119.5°E~120°E。2003年冬季, Wang等(2008)在南海北部捕捉到两个反气旋涡, 根据水团特性分析其中一个是从黑潮流套中脱离出来的。Metzger和Hurlburt (2001)认为, 反气旋涡从黑潮流套中脱离出来具有极大的不确定性。Yuan等(2006)指出, 黑潮反气旋式入侵不是永久现象, 发生的概率小于30%, 即超过70%的情况下黑潮是以分支的形式进入南海或不进入南海。Nan等(2011a)结合南海北部的观测资料和卫星高度计资料, 发现南海北部夏季存在3个长周期的反气旋涡。Nan等(2011b)还利用卫星高度计资料统计分析了南海东北部中尺度涡的特征, 发现该海域冬季主要为反气旋涡, 夏季则主要被气旋涡占据, 反气旋涡一般比气旋涡要强, 具有更大的涡动能, 能携带更多的能量。
利用 16年卫星高度计资料, Chelton等(2011)针对全球表层中尺度涡的分布、大小、存在时间、传播特性等给出了详细的描述(图2见文后彩图), 发现气旋涡和反气旋涡数目基本相当, 且大部分为非线性涡(旋转速度大于传播速度), 除南极绕流区, 大部分区域中尺度涡产生后向西传播。结合全球卫星高度计资料和自沉浮式剖面探测浮标(Argo)剖面资料, Zhang等(2013)反演了中尺度涡三维结构,进而估计了中尺度涡在全球范围造成的西向水体输运量可以达到 30~40Sv(1Sv=106m3/s),在量级上与大尺度的风生及热盐环流是可比的(Zhang et al., 2014a)。Dong等(2014)和Xu等(2014)分别利用卫星高度计资料计算了全球中尺度涡的热盐和能量输送。Faghmous等(2015)基于逐日卫星高度计资料, 统计了全球1993~2014年中尺度涡大小、强度、传播轨迹等参数, 并形成了数据集供学者免费下载(http: //datadryad.org/resource/doi: 10.5061/ dryad. gp40h)。
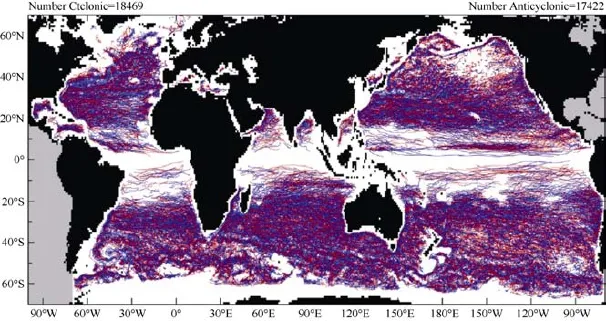
图2 卫星高度计观测的全球中尺度涡分布和运动轨迹(Chelton et al., 2011)Fig.2 Global distribution and trajectories of mesoscale eddy by satellite altimeter observations (Chelton et al., 2011)
总之, 目前对中尺度涡的大小、分布、强度、生成消亡、水体和能量输送都有比较清楚的认识, 但是也存在不少问题: ①卫星只能看中尺度涡的表面, 不能看到其三维结构, 因此目前对中尺度涡的三维结构认识不足。Zhang等(2013)利用 Argo浮标剖面资料建立了中尺度涡统一的三维结构, 但是实际观测到的中尺度涡垂向结构差别很大。对中尺度涡三维结构观测的不足阻碍了其动力学研究的发展。②海洋中绝大部分涡旋是非定常涡旋,产生的位置和时间不固定(Chelton et al., 2011),因此目前中尺度涡的现场观测基本都是靠运气, 还没有专门针对性的观测设计。中尺度的三维结构缺少观测, 尤其对其精细结构尚不清楚。③对中尺度涡传播过程中热盐输送和结构变异缺乏观测。目前还没有针对一个中尺度涡三维结构的追踪观测。虽然卫星高度计可以从表面追踪中尺度涡, 但是其内部结构的变化无法得到, 这也使得对中尺度涡输送水量、热量的计算产生误差。④针对中尺度涡的多要素、多参数追踪观测尚未开展。目前观测到的仅限于其温盐结构, 中尺度涡对营养盐和浮游动物都有输送作用, 对中尺度涡的生化要素观测也是必要的。⑤大洋中还存在次表层和深层涡旋(Gordon et al., 2002; Chiang and Qu, 2013; Zhang et al., 2015), 这是卫星高度计无法观测的。因为以上问题亟待解决, 预计不久的将来便会出现大洋中尺度涡三维结构无人自主观测系统, 且该系统最有可能是基于无人船平台的, 系统将会具有涡旋识别和自动跟踪功能, 可以用来研究中尺度涡三维精细结构,获取高分辨率的中尺度涡立体海洋要素。
2 中尺度涡观测设备国内外研究现状
中尺度涡研究存在的问题要通过高密度多参数追踪观测来解决。目前, 仅有少数学者初步开展了针对中尺度过程垂向结构的研究,如应用Argo浮标数据配合卫星高度计数据对大洋中尺度涡旋(反涡旋)的平均三维结构进行研究, 揭示了中尺度涡的温盐垂直结构差异(Chaigneau et al., 2011; Zhang et al., 2014a); Pairaud等(2014)利用水下滑翔机(glider)和集成于科考船的移动式船基剖面观测系统(moving vessel profiler, MVP), 对中尺度过程中海洋要素垂直分布进行了11d的观测, 对西北地中海海域上层600m中尺度过程的不稳定性进行了研究。Lien等(2014)利用在菲律宾以东18.75°N断面的潜标资料, 研究了中尺度涡对黑潮流量的影响, 发现气旋涡增大黑潮流量,反气旋涡减小黑潮流量。可以看出, 目前针对中尺度过程的现场观测手段存在以下问题:①科考船大面观测成本太高, 且难以做到高密度站位观测。②Argo浮标观测随波逐流, 遇到中尺度涡靠运气, 且不能实现同步或准同步观测。③水下滑翔机运动速度低于大多数中尺度涡旋转速度, 不能实现针对中尺度涡的跟踪观测。④自主式水下潜器(autonomous underwater vehicle, AUV)续航能力差, 应用成本高。⑤波浪滑翔机(wave glider)受自身供电能力制约, 无法为观测设备提供足够的电力支撑。⑥潜标、浮标观测对于研究中尺度涡来说无异于守株待兔, 且无法实现三维结构观测。鉴于目前观测手段对中尺度涡观测能力的不足, 因此迫切需要一种新的机动性强、续航能力高、具有环境感知能力和连续自主水下剖面观测的手段对中尺度涡精细结构进行观测。无人船平台具有无人操作、自主航行等技术特点, 结合水下无人自主剖面测量单元, 其可成为最合适的观测手段。其优势在于可实现专门针对中尺度涡的观测, 且成本较低; 可实现对中尺度涡三维精细结构的观测, 包括温、盐、流等; 可实现对中尺度涡的追踪观测, 对其形成和传播过程进行全程观测。
近些年来, 无人船技术已经相当成熟并实用。1993年, 麻省理工学院让名为“ARTEMIS”的无人船首次进入水文观测领域, 并先后在查尔斯河和波士顿港进行了实验。21世纪, 随着人工智能、微电子、通信等技术的迅速发展,制约无人船发展的诸多技术瓶颈得以部分解决, 许多国家加大了无人船的研发力度, 尤其在海洋军事中得到极大的发展和应用。2002年, 美国水下作战中心联合 Radix Marine、Northrop Grumman等公司开发了 Spartan Scout号无人艇, 其具备模块化、多任务、可高速航行、半自主控制等特点。在无人科考船方面, 2003年, 雅马哈公司研制的“Kan-Chan”号无人船可用于监控海洋和大气的化学和物理参数, 具有很长的续航能力(孔庆福等, 2004)。2004年, 英国普利茅斯大学 MIDAS科研小组研发了“Springer”号无人船, 其可被用于内河、水库和沿海等浅水水域污染物追踪、环境和航道信息测量等。其被设计成一款长4m、宽2.3m及排水量0.6t的中等水线面双体船。其装载的 YSI环境监测设备可以对温度、电导率、溶解氧、pH、氯化物、水深、浊度、叶绿素等因子进行监测分析。Naeem等将“Springer”用于浅水水域测绘、水文及环境监测, 以及污染物跟踪。2005年, 意大利研发的双体“Charlie”号无人船可对南极洲海洋表层进行取样, 收集大气海洋界面数据(Caccia et al., 2008)。2005年, 以色列Elbit公司研制的“Stingary”号无人艇, 具有隐蔽性好、船型小巧等特点, 可应用于海岸物标识别、电子战争、智能巡逻等任务中(Yan et al., 2010)。美国南佛罗里达大学的 Steimle和Hall(2006)同样开发了一款双体船作为海洋环境监测设备。2010年, 新加坡航展推出的“Venus”号无人船可搭载水雷及电子战模块,并能进行海上监视任务(万接喜, 2014)。2013年, 挪威卑尔根大学与美国华盛顿大学联合研制了风能无人船, 对墨西哥湾北部区域进行了长达两个月的观测, 实现了海洋表层温度、电导率和可溶性有机物的测量(Ghani et al., 2014)。虽然我国的无人船技术研究起步较晚,但近年来也有很多进展。2013年, 我国研发的“海巡166号”无人船具备玻璃钢全封闭结构,采用柴油机作为动力推进, 具有良好的机动性、抗沉性和抗风浪能力; 无人驾驶海上探测船“天象一号”曾为北京奥运会青岛奥帆赛提供气象保障服务; 沈阳新光公司推出的 XG-2概念无人船能依靠卫星通信, 承担海上反潜任务; 还有珠海云洲智能科技有限公司将无人船运用到环境监测领域, 进行在线水质污染和核污染监测(及轶嵘, 2014; 张云飞, 2015)。但现有的无人船都不具备水下温盐剖面及水质要素剖面探测能力。
3 基于无人船的中尺度涡观测设备展望
作为自动观测中尺度涡最合适的平台,近年来无人船已从人为操作到自动控制, 从无避碰到基本避碰、再到智能避碰, 从无智能策略到个体智能策略、再发展到群体智能策略。然而, 作为一种强大的兼容和扩展性平台, 无人船在海洋科学数据观测方面仍需完善, 如提升无人船艇的自适应水平和自主决策能力,减少对远程操控人员的依赖, 应对恶劣海况的防摇晃能力, 降低通信带宽要求, 以及海洋观测设备的免维护设计等。
作为中尺度涡精细结构观测的重要技术手段, 全自动海洋观测无人船将自动获取所测海域的多参数环境数据, 在线同步计算相关数据, 并通过平台记录能够为海洋科学的前沿研究提供重要数据。通过搭载卫星、通信设备模块, 实现数字化、信息化、网络化技术运用, 无人船能够实现不间断、实时的中尺度涡现场观测信息传递。在其他观测设备难以达到或者接近的情况下, 还可以直接干预中尺度涡的观测工作, 实现全维度和全方位的实时观测, 这对有效获取中尺度涡精细结构数据至关重要。
无人船是移动观测平台, 高分辨率的中尺度涡垂直剖面海洋要素的获取, 还需要在无人船上装载海洋要素垂直剖面测量系统。目前, 可在科考船上进行海水温度和盐度等垂直剖面测量的设备主要有定点温盐深(CTD)剖面仪、投弃式CTD剖面仪、以SeaSoar为代表的多参数拖曳测量系统、走航式垂直剖面测量系统MVP和UCTD等。定点CTD剖面仪需要在船舶停止航行时人为控制作业, 其测量点位准确, 但耗费船时, 导致测量效率低下, 从而带来高昂的海洋测量成本, 大大限制了海洋数据的获得。XCTD是投弃式仪器, 其测量剖面接近垂直, 虽可在航行中使用, 但由于不可回收, 即使制造成本已得到控制, 使用成本仍然较高。多参数拖曳测量系统(如SeaSoar)是在拖曳体内置数字化伺服系统, 根据拖曳体携带的压力传感器所观测到的压力,以及预置工作轨迹对应深度压力之间的差异信号, 通过调整其拖体上旋转翼的攻角, 实现连续的锯齿形测量剖面。它既可在航测量, 也可重复使用, 并且可搭载多种传感器, 实现多参数测量, 但其尺寸, 尤其是所用绞车尺寸较大, 系统也很复杂, 船只不能同时拖曳其他仪器。其投放和回收过程繁杂而费力, 当达到300m 以上深度需在拖曳缆上安装导流片时,更增加了操作的复杂度, 无法实现无人自主观测。与SeaSoar一样可重复使用且可在航海洋剖面进行测量的还有 MVP, 其特点在于通过不断释放和收回绞车上的缆绳, 使其测量剖面接近垂直, 且在船只航行同样距离时, 可测量更多的剖面。与SeaSoar相仿, 该系统体积较大, 系统复杂度高, 造价昂贵, 只适合在大型船舶或专用调查船上安装。美国的斯克里普斯海洋研究所开发了一种成本相对较低、结构紧凑的在航CTD剖面测量系统(UCTD), 其体积较小、系统结构简单、安装和使用方便,既可用于专业调查船, 也可用于志愿船和机会船; 其造价较低且可回收以重复使用, 从而大大降低了每一剖面测量的成本, 可大量获取海洋剖面数据, 也可在投放测量后校准传感器, 从而大大提高观测数据的质量, 但是其下潜深度有限, 并需要人工绕线, 因此增加了观测期间的劳动强度。总之, 目前现有的海洋剖面测量装置虽然已部分实现自动化观测,但都需要人为干预才能正常工作。未来将会出现基于无人船平台的自动水下剖面观测单元及船载自动绞车垂直剖面测量单元, 它具有自动控制升降、自行数据传输等自主观测能力,可为中尺度涡三维结构的高分辨率海洋要素的获取作出贡献。
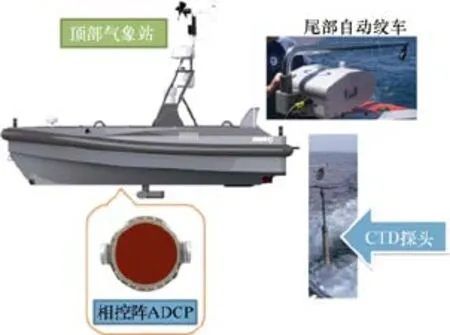
图3 中尺度涡自动观测系统示意图Fig.3 System charts of oceanic mesoscale eddies automatic observing system
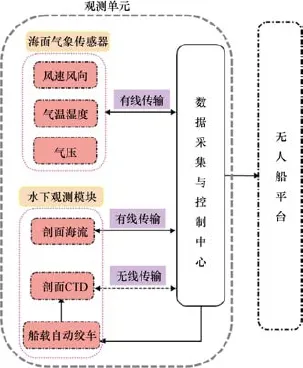
图4 中尺度涡自动观测系统框图Fig.4 System block diagram of oceanic mesoscale eddies automatic observing system
综上所述, 未来会出现基于无人船平台的大洋中尺度涡三维结构观测系统, 以解决目前对中尺度涡三维结构观测认识的不足,该无人船平台将具有长期自主航行能力, 将搭载自动水下剖面观测平台(包括走航ADCP、船载自动绞车及其集成的 CTD)、自动气象站,搭载上述平台后无人船便成为大洋中尺度涡三维结构无人自主观测系统。该系统将具有中尺度涡观测航线自动规划、自动水下剖面观测等先进技术, 系统结构预计如图3所示, 系统框图初步设计如图4所示, 将由无人船平台和观测单元构成, 其中观测单元将由各种传感器和数据采集控制中心构成。在无人船的航行过程中, 走航 ADCP和船载自动气象站将进行海面气象和剖面海流的连续观测; 同时,通过船载自动绞车平台对拖曳缆绳的收放,实现水下测量平台在水中周期性的近似垂直下降与抛物线式爬升, 并在下降过程中完成海洋要素的垂直剖面观测, 实现高空间分辨率的海洋气象、海流、水下温盐深等参数的立体观测, 来支撑大洋中尺度涡三维结构的研究。
4 结语
本文对中尺度涡观测设备及无人船平台在观测中尺度涡方面的应用前景和展望等问题进行了综述。鉴于中尺度涡观测的重要性及无人船在其应用方面的广阔前景, 很多国家都致力于无人船的研究, 目前正处于高速发展的关键阶段。特别是随着我国电子通信, 尤其是北斗卫星通信技术的迅速发展, 为无人船在大洋自主航行的通信奠定了科技支撑,未来的无人船艇有可能带来中尺度涡观测的革命。不过在无人船的研究方面, 我国与世界先进水平仍存在差距, 应该借鉴美国、以色列等国家的经验, 积极开展无人船各项关键技术的研究, 推进无人船的实用化进程。没有理由怀疑, 基于无人船的全自动化中尺度涡三维结构观测系统将在近些年诞生, 到时便可观测中尺度涡的垂直结构特征及其时空变化特征, 进而可对中尺度涡带来的物质和能量输送进行系统认识。
程旭华, 齐义泉. 2008. 基于卫星高度计观测的全球中尺度涡的分布和传播特征. 海洋科学进展, 26(4): 447-453
及轶嵘. 2014. 云洲智能: “万能”无人船. 创业邦, (8): 40-41
孔庆福, 吴家明, 贾野, 等. 2004. 舰船喷水推进技术研究. 舰船科学技术, 26(3): 28-30
李立, 苏纪兰, 徐建平. 1997. 南海的黑潮分离流环.热带海洋, 16(2): 42-57
李立. 2002. 南海中尺度海洋现象研究概述. 台湾海峡, 21(2): 265-274
万接喜. 2014. 外军无人水面艇发展现状与趋势. 国防科技, 35(5): 91-96
王桂华, 苏纪兰, 齐义泉. 2005. 南海中尺度涡研究进展. 地球科学进展, 20(8): 882-886
王胄, 陈庆生. 1987. 南海北部之暖心涡流(一): 对南海暖涡之初步观测. 台湾大学海洋学刊, (18): 92-103
张云飞. 2015. 让无人船在水面飞. 百科探秘(海底世界), (6): 29-30
Caccia M, Bibuli M, Bono R, et al. 2008. Basic navigation, guidance and control of an Unmanned Surface Vehicle. Autonomous Robots, 25(4): 349-365
Chaigneau A, Le Texier M, Eldin G, et al. 2011. Vertical structure of mesoscale eddies in the eastern South Pacific Ocean: a composite analysis from altimetry and Argo profiling floats. Journal of Geophysical Research: Oceans, 116: C11025
Chelton D B, Schlax M G, Samelson R M, et al. 2007. Global observations of large oceanic eddies. Geophysical Research Letters, 34(15): L15606
Chelton D B, Schlax M G, Samelson R M. 2011. Global observations of nonlinear mesoscale eddies. Progress in Oceanography, 91(2): 167-216
Chelton D B, Schlax M G. 1996. Global observations of oceanic Rossby waves. Science, 272(5259): 234-238
Chen G X, Hou Y J, Chu X Q, et al. 2010. Vertical structure and evolution of the Luzon Warm Eddy. Chinese Journal of Oceanology and Limnology, 28(5): 955-961
Chen G X, Hou Y J, Chu X Q. 2011. Mesoscale eddies in the South China Sea: mean properties, spatiotemporal variability, and impact on thermohaline structure. Journal of Geophysical Research: Oceans, 116: C06018
Chiang T L, Qu T D. 2013. Subthermocline eddies in the western equatorial Pacific as shown by an eddyresolving OGCM. Journal of Physical Oceanography, 43(7): 1241-1253
Chu P C, Chen Y C, Lu S H. 1998. Wind-driven South China Sea deep basin warm-core/cool-core eddies. Journal of Oceanography, 54(4): 347-360
Chu P C, Fan C W. 2001. A low salinity, cool-core cyclonic eddy detected northwest of Luzon during the South China Sea Monsoon Experiment (SCSMEX) in July 1998. Journal of Oceanography, 57(5): 549-563
Dong C M, McWilliams J C, Liu Y, et al. 2014. Global heat and salt transports by eddy movement. Nature Communications, 5: 3294
Faghmous J H, Frenger I, Yao Y S, et al. 2015. A daily global mesoscale ocean eddy dataset from satellite altimetry. Scientific Data, 2: 150028
Ghani M H, Hole L R, Fer I, et al. 2014. The SailBuoy remotely-controlled unmanned vessel: measurements of near surface temperature, salinity and oxygen concentration in the Northern Gulf of Mexico. Methods in Oceanography, 10: 104-121
Gordon A L, Giulivi C F, Lee C M, et al. 2002. Japan/East Sea intrathermocline eddies. Journal of Physical Oceanography, 32(6): 1960-1974
He Z G, Wang D X, Hu J N. 2002. Features of eddy kinetic energy and variations of upper circulation in the South China Sea. Acta Oceanologica Sinica, 21(2): 305-314
Hu J Y, Gan J P, Sun Z Y, et al. 2011. Observed three-dimensional structure of a cold eddy in the southwestern South China Sea. Journal of Geophysical Research: Oceans, 116: C05016
Hwang C, Chen S A. 2000. Circulations and eddies over the South China Sea derived from TOPEX/Poseidon altimetry. Journal of Geophysical Research: Oceans, 105(C10): 23943-23965
Jia Y L, Liu Q Y. 2004. Eddy Shedding from the Kuroshio Bend at Luzon Strait. Journal of Oceanography, 60(6): 1063-1069
Li L, Nowlin W D Jr, Su J L. 1998. Anticyclonic rings from the Kuroshio in the South China Sea. Deep Sea Research Part I: Oceanographic Research Papers, 45(9): 1469-1482
Lien R C, Ma B, Cheng Y H, et al. 2014. Modulation of Kuroshio transport by mesoscale eddies at the Luzon Strait entrance. Journal of Geophysical Research: Oceans, 119(4): 2129-2142
Metzger E J, Hurlburt H E. 2001. The nondeterministic nature of Kuroshio penetration and eddy shedding in the South China Sea. Journal of Physical Oceanography, 31: 1712-1732
Morimoto A, Koichi K, Yanagi T. 2000. Characteristics of sea surface circulation and eddy field in the South China Sea revealed by Satellite Altimetric Data. Journal of Oceanography, 56(3): 331-344
Nan F, He Z G, Zhou H, et al. 2011a. Three long-lived anticyclonic eddies in the northern South China Sea. Journal of Geophysical Research: Oceans, 116: C05002
Nan F, Xue H J, Xiu P, et al. 2011b. Oceanic eddy formation and propagation southwest of Taiwan. Journal of Geophysical Research: Oceans, 116: C12045
Pairaud I L, Garreau P, Le Berre D, et al. 2014. Observation of Mesoscale Instabilities of the Northern Current in the North Western Mediterranean Sea: A Combined Study Using Gliders, Surface Drifters, Moving Vessel Profiler and Vessel Data in the Ligurian Sea. American Geophysical Union
Steimle E T, Hall M L. 2006. Unmanned Surface Vehicles as Environmental Monitoring and Assessment Tools. Proceedings of the OCEANS. Boston, MA: IEEE
Wang G H, Chen D K, Su J L. 2008. Winter eddy genesis in the eastern South China Sea due to orographic wind jets. Journal of Physical Oceanography, 38(3): 726-732
Wang G H, Su J L, Chu P C. 2003. Mesoscale eddies in the South China Sea observed with altimeter data. Geophysical Research Letters, 30(21): 2121
Xiu P, Chai F, Shi L, et al. 2010. A census of eddy activities in the South China Sea during 1993-2007. Journal of Geophysical Research: Oceans, 115: C03012
Xiu P, Palacz A P, Chai F, et al. 2011. Iron flux induced by Haida eddies in the Gulf of Alaska. Geophysical Research Letters, 38: L13607
Xu C, Shang X D, Huang R X. 2014. Horizontal eddy energy flux in the world oceans diagnosed from altimetry data. Scientific Reports, 4: 5316
Yan R J, Pang S, Sun H B, et al. 2010. Development and missions of unmanned surface vehicle. Journal of Marine Science and Application, 9(4): 451-457
Yuan D L, Han W Q, Hu D X. 2006. Surface Kuroshio path in the Luzon Strait area derived from satellite remote sensing data. Journal of Geophysical Research: Oceans, 111(C11): C11007
Zhang Z G, Wang W, Qiu B. 2014a. Oceanic mass transport by mesoscale eddies. Science, 345(6194): 322-324
Zhang Z G, Zhang Y, Wang W, et al. 2013. Universal structure of mesoscale eddies in the ocean. Geophysical Research Letters, 40(14): 3677-3681
Zhang Z W, Li P L, Xu L X, et al. 2015. Subthermocline eddies observed by rapid-sampling Argo floats in the subtropical northwestern Pacific Ocean in Spring 2014. Geophysical Research Letters, 42(15): 6438-6445
Zhang Z W, Zhong Y S, Tian J W, et al. 2014b. Estimation of eddy heat transport in the global ocean from Argo data. Acta Oceanologica Sinica, 33(1): 42-47
Prospects for Unmanned Observation System of the Oceanic Mesoscale Eddy
FAN Cong-Hui, YU Fei*, NAN Feng, WEI Chuan-Jie, REN Qiang
(Marine environmental engineering technology research and Development Center, Institute of oceanology, Chinese Academy of Sciences, Qingdao 266071, China) *Corresponding author, Email: yuf@qdio.ac.cn
Mesoscale eddy is ubiquitous in the world ocean. Its energy is an order of magnitude larger than the large-scale general ocean circulation playing an important role on the mass and energy transports, and global climate change. Due to lack of in-situ observations, eddies are mainly observed by utilizing satellite altimeter data. Its size, distribution, intensity, and mass and energy transports can also be estimated based on sea surface height data. However, the vertical structure of the mesoscale eddy can’t be captured by remote sensing, which led to large error for estimation of heat and energy transports by mesoscale eddy. Now we know little about the three-dimensional structure of the mesoscale eddy. To design an unmanned observation system to investigate the three-dimensional structure of the oceanic mesoscale eddy is necessary. This system will integrate and apply the advanced technology (such as unmanned ship platform, ocean automatic profile observation) to observe the three-dimensional structure and temporal-spatial variation of the mesoscale eddy, which will enhance understanding of the material and energy transfer by the mesoscale eddy.
unmanned surface vehicle; mesoscale eddy; ocean automatic profile observation
P715.4
10.12036/hykxjk20160719002
* 资助项目: 国家高技术研究发展计划(863计划)项目(2013AA122803); 中国科学院战略性先导科技专项(XDA11040102)。范聪慧, 男, 工程师, E-mail: fanconghui@qdio.ac.cn
① 通讯作者: 于非, 男, 研究员, 博士生导师, 从事海洋调查与区域海洋学研究工作, E-mail: yuf@qdio.ac.cn
2016-7-19, 收修改稿日期: 2016-7-31
