负压式机器人设计
2016-03-10山东淄博实验中学2015级26班许云倩
山东淄博实验中学2015级26班 许云倩
山东理工大学机械工程学院 王营博
负压式机器人设计
山东淄博实验中学2015级26班 许云倩
山东理工大学机械工程学院 王营博
本文根据负压吸附原理设计了可自行爬壁的机器人,其样机能从地面直接爬上垂直墙壁,并可以通过无线遥控控制其在墙面上自由移动。
负压吸附;驱动控制电路;无线遥控系统
0 综述
爬壁机器人属于特种作业机器人的一种[1]。按照负压原理,设计了一种小型化、功能简单的爬壁机器人,其样机采用负压风扇吸附,直流步进电机驱动,齿轮啮合方式传动,无线遥控控制方式,并通过TX-2B/RX-2B无线遥控接收芯片,LM7805集成稳压电源等器件的应用初步探讨了无线遥控发射机、接收机的工作原理和新型H桥电路对直流电机正反转的控制。所研制的样机在功能上可实现自动爬壁、并完成直角转弯和前进等运动的无线控制,在功率驱动能力上达到了机器人自由运动的要求。
1 工作原理及参数设计
结合国内外小型负压爬壁机器人的发展概况及其特点,可以看出爬壁机器人设计时的几个关键指标为:重量、倾覆力矩、密封性能、单位能耗、噪声[2]。
爬壁机器人可以利用地面式机器人的工作原理,但要能在垂直壁面上移动并且稳定工作,必须克服自身的重力,需要产生足够的吸附力来完成吸附功能,同时也应尽量采用轻质材料,减轻本体重量[6],使其重心下降来增强机器人的稳定性。
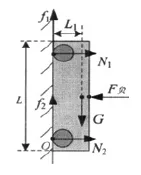
图1 爬壁机器人受力图

图2 轮式分布图
爬壁机器人靠负压装置产生的吸附力F负吸附在墙上的。机器人爬壁的动力是由车轮和壁面之间的摩擦力提供的,而摩擦力的大小与摩擦系数和正压力有关。图1为爬壁机器人的受力图。爬壁机器人静止在壁面上时,力平衡方程为:

爬壁机器人本体在壁面上不倾覆的条件是:∑M≥0,即:

其中L1为机器人的重心与壁面间的距离,H2、H1分别为车轮到机器人重心的垂直距离。

机器人在壁面上能可靠吸附,必须满足即:

在设计爬壁机器人时,应尽可能使机器人的重心接近壁面,并尽量错开车轮之间的距离,吸盘的形状应尽量成扁平状,这样有利吸附。
2 机械部分设计
2.1 移动方式设计
该机器人采用轮式移动的方式,因为运动速度快,控制简单。通过选用摩擦系数大的轮子可以克服打滑的缺点。普通的轮式移动机构一般有三个轮、四个轮。三轮移动机构原理简单,但在较长距离移动时,两车轮的直径差会影响到前进的方向。根据以上分析,本文采用四个轮,如图2所示为轮式分布图,左右两后轮采用独立驱动,两侧的轮都为同步传动,车体靠两侧的速度差来控制机器人的方向。采用这种方式还可以使机器人在小范围内实现转向。机器人转向通过轮速差来实现,使四个轮子都是主动轮,所受的压力均等而且越障性能好,增加了机器人的驱动能力(见图2)。
2.2 吸附装置设计
为保证机器人吸附在墙面上的重要部件,由吸盘外壳、负压发生装置、密封圈组成。当电机转动带动风扇叶轮旋转时,机器人体内叶片周围形成了一定的负压,达到吸附的目的。
3 爬壁机器人控制系统设计
3.1 电源的选取
为了减轻机器人的重量,将吸附装置和移动装置的电源统一,采用同一个电池供电,可充分发挥电池的能量,并减轻了机器人的重量。而在本系统中涉及到两个电压供电的问题,系统在信号处理部分需要有5V电压,而风扇电机、轮式电机都需7V电压。因此在系统中采用7805集成电源模块来得到5V电压。LM7805可以使高于5V的电压转化为恒定的5V电压,保证逻辑电路部分电源的稳定性。具体的电路设计情况参照系统的总体电路图。
3.2 无线遥控的选择
由于无线电遥控具有迂回性和曲折性,只要在有效的距离范围内,可以不受方向和障碍物的限制,所以本文采用无线电遥控方式控制。选择TX-2B/RX-2B芯片作为方案一,PT2262/PT2272芯片作为方案二,因为相应的TX-2B/RX-2B和PT2262/PT2272无线遥控芯片采用了低发射功率、灵敏度高,该模块使得遥控电路十分简洁。
3.3 爬壁机器人电路的设计
TX-2B是一款带地址、数据编码功能的无线遥控发射芯片,其外观引脚如图3所示,发射芯片TX-2B集成发射单元,使发射电路十分简洁。RX-2B与TX-2B配对使用,RX-2B为接收芯片。
3.4 电机驱动与控制设计
无线遥控爬壁机器人的移动是由两个直流电机来驱动的。当发射机发出信号,接收机接收后输出指令,但该指令信号太弱并不能直接来驱动电机。这就需有一个重要的电机驱动环节。H桥电机控制电路如图4所示,该机器人的移动只是对电机的开关控制和正反转控制。图中电机和四个三极管构成一个H字母,所以这种控制叫做H桥控制。图中Vcc为电机电源电压 ,输出端并联电容C2,用于降低感性元件电机产生的尖峰电压。
The design of negative pressure Wall-climbing robot is designed
Xu yunqian1Wang yingbo2
(1.shandong zibo experimental high school,Zibo 255000;2.School of Mechanical Engineering Shandong University Of Technology,Zibo 255049)
Wall-climbing robot is designed according to negative pressure suction principle of,The prototype can directly move to vertical wall from the ground and can be controlled by wireless remote control .
Negative pressure suction system;Driven control circuit;Non-wires Remote Contorl