电影乐园乘骑系统交通控制建模与仿真研究
2016-03-08王锋辉高艳贺
王锋辉,高艳贺
(1.万达文化旅游规划研究院 游乐设备所,北京 100022;2.西安外国语大学 英语教育学院,陕西 西安 710128)
电影乐园乘骑系统交通控制建模与仿真研究
王锋辉1,高艳贺2
(1.万达文化旅游规划研究院 游乐设备所,北京 100022;2.西安外国语大学 英语教育学院,陕西 西安 710128)
电影主题乐园内的乘骑系统具有运行过程中车辆状态复杂多变的特点,乘骑车辆的运行安全性要求较高。为了在设计初期完整逼真地模拟乘骑系统运行的全过程,并优化影响乘骑系统性能的关键参数,开发了基于Flexsim的电影乐园乘骑系统交通控制可视化仿真平台。该可视化仿真平台以电影乐园乘骑交通控制模型为基础,利用Flexsim软件在离散事件系统建模方面的优势,能直观地展示电影乐园乘骑系统运行的全貌及细节,并统计分析乘骑系统的运行参数。该仿真平台不仅能满足交互仿真的需求,而且能实现乘骑系统参数优化,因而可作为电影乐园乘骑系统前期设计的基础工具。
电影乐园;乘骑系统;交通控制;可视化仿真
电影乐园是将车载动感模拟器与巨幕、球幕、3D立体电影和特效等技术集成在一起的娱乐项目,可以营造传统影院不能达到的沉浸式体验[1]。游客在电影乐园中乘坐具有一定自由度的乘骑车辆,沿设定的主题路线,穿梭在真实场景和立体幻境之间。电影乐园中的乘骑车辆本质上是一种无人驾驶车辆,沿预先设定的线路循环运行,依次经过各种不同的场景,包括互动体验段、停车观影段和跌落体验段等。游客上车后,乘骑车辆在不同场景对应的轨道区段上以不同的速度运行,在互动体验段,乘骑车辆可依靠自身的动力装置或轨道上安装的外部动力装置运行;在停车观影段,乘骑车辆需精确停靠在特定位置,直至游客观看完成该处的影片后继续行驶;在跌落体验段,乘骑车辆被提升至一定高度后,依靠自身重力沿轨道向下滑行,让游客体验室内过山车的刺激。
电影乐园乘骑系统采用多个乘骑车辆连续运行的方式接待游客,一方面需要保证电影乐园单位时间内能有尽可能大的游客接待量;另一方面要保证乘骑车辆之间不发生碰撞等安全事故。乘骑系统交通控制是保证系统效率及安全的主要条件,对于整个电影乐园至关重要。另外,乘骑系统的交通控制直接影响乘骑系统的运行模式以及发车间隔、用车数量等系统参数。在项目的论证阶段,即需考虑乘骑系统的交通控制,并基于乘骑系统的交通控制模型开展系统仿真。通过系统仿真,即可确定系统运行的主要参数,并以此为基础进行参数优化。
目前,与电影乐园乘骑系统相关的仿真多集中于乘骑车辆动力学性能的研究[2-4],与无人车辆交通控制有关的研究重点在于车辆调度及AGV的交通控制[5-6],而电影乐园乘骑系统的运行与场景及游客行为紧密相关,因而有其特殊性。另外,电影乐园乘骑系统的仿真需要直观地展示系统运行的全貌,因而有必要实现可视化的仿真。针对上述问题,本文在分析电影乐园乘骑交通控制系统工作原理的基础上,建立了模拟电影乐园乘骑系统运行的可视化仿真平台。
1 电影乐园乘骑系统的工作流程
1.1 系统工作流程
电影乐园乘骑系统的工作流程如图1所示。乘骑交通控制系统首先收集游客等车信息,若有游客等待,则检索是否有乘骑车辆可调用;可用乘骑车辆接到运行命令后,进入上客区,游客按顺序上车;游客上车后,若乘骑车辆已满座,或者超过上车等待时间阈值,且游客的安全装置已锁定,则乘骑车辆处于待发状态;乘骑交通控制系统发出乘骑车辆发车指令,乘骑车辆进入运行状态,并受中央控制室的监视系统监控;在行驶过程中,乘骑车辆运行速度按预先设定的程序调整;整个行程结束后,游客在下客站台下车并离开主演区,如此循环。

图1 乘骑系统工作流程图
1.2 乘骑车辆的工作流程
乘骑系统中单个乘骑车辆的工作流程如图2所示。对于在上客站台处停靠的乘骑车辆,若游客已上车且安全装置已锁定,当发车时间已到,则车辆进入“就绪”状态,在获得中央控制室的发车许可命令后,乘骑车辆发车。在行驶过程中,乘骑车辆连续监测自身的信息状态,同时接收中央控制室的上层控制命令。若本车的安全区域内无障碍,且上层控制命令未发生改变,则乘骑车辆继续行驶直至下客站;否则,乘骑车辆停车,从而保证本车及整个系统的安全。

图2 单车运行控制流程图
2 乘骑交通控制系统分析
2.1 乘骑交通控制系统的组成
电影乐园乘骑交通控制系统由中央控制系统、乘骑车辆、旁轨基础设施及通信系统组成。中央控制系统是乘骑交通控制系统的核心,负责乘骑车辆状态的监控及车辆调度。乘骑车辆是被控对象,其车载控制系统控制乘骑车辆自主运行。乘骑车辆受中央控制室监控,并接受中央控制室的调度和管理。乘骑车辆与中央控制系统之间保持双向通信,车载控制系统受中央控制系统发来的上层调度指令约束。旁轨基础设施主要包括供电装置及位置检测传感器,为乘骑车辆供电,并实时检测乘骑车辆的位置、速度等信息。通信系统提供有线和无线通信,其中车辆的位置信息由旁轨基础设施中的传感器通过有线通信发送给中央控制室,车辆调度指令及车载音频的开关等指令通过无线通信由中央控制室发送给乘骑车辆。
2.2 乘骑交通控制系统的工作原理
中央控制系统是乘骑交通控制系统的上层控制部分,负责系统监视、乘骑设备调度及安全控制,完成电影乐园中的游客信息收集、乘骑设备调度、乘骑设备队列管理、应急管理及场景互动管理。中央控制系统通常以自动模式工作,在特殊条件下,也可在操作人员的干预下工作。车载控制系统是乘骑交通控制系统的下层控制部分,负责将乘骑设备的自检信息、位置、速度、加速度、停靠状态、供电状态和乘客安全状态等信息实时发送给中央控制系统;同时,接收中央控制系统的调度指令,作为上层控制指令发送给车载电气控制系统,控制乘骑车辆按预先设定的速度、加减速度运行,并将自身的状态信息实时发送给上层控制系统。
2.3 乘骑交通控制系统的通信
电影乐园乘骑交通控制系统的通信体系架构如图3所示。中央控制系统及车载控制系统均包含各自的通信模块。中央控制系统的通信模块与演出控制系统及车载控制系统保持双向通信,接收演出控制系统提供的游客等车信息,发送乘骑系统的状态信息。演出控制系统协调整个电影乐园内包含乘骑系统、影片和特效等系统的运行。车载控制系统的通信模块与中央控制系统的通信模块保持双向通信,接收每个乘骑车辆的运行指令,发送每个乘骑车辆的状态信息。车载控制计算机通过车内通信向车辆行驶控制模块、车载运动平台控制模块及车载媒体控制模块发送不同的控制指令。

图3 乘骑设备交通控制系统通信体系架构图
3 乘骑交通控制系统建模
电影乐园乘骑交通控制系统的运行涉及中央控制系统、车载控制系统、游客、乘骑车辆、沿途停靠站点和观影场景等对象,这些对象之间动态交互,相互影响。从运营管理的角度看,乘骑系统运行依次经历如下状态:游客进站、排队等车、上车、发车、乘骑车辆运行、中途停靠各站点、游客下车及出站。游客进站、排队等车、车辆进站和出站等构成典型的离散事件动态系统,而乘骑车辆在各站点之间的运行则以连续系统的形式呈现;因此,电影乐园乘骑交通控制系统本质上是一种混合动态系统,需采用混合动态系统建模方法建立其系统模型。
不同时间进入电影乐园的游客形成游客流,游客流满足如下条件:1)在不相重叠的时间区间内,游客到达数是相互独立的;2)对于一个充分小的时间段,一个游客到达的概率与时间无关,而与该时间段的长度成正比;3)对于一个充分小的时间段,2个或2个以上的顾客到达的概率可以忽略。因此,n个游客从开始到经过时间t达到的概率服从泊松分布,即:
(1)
游客相继到达的时间间隔服从指数分布:
f(t)=λe-λt,t>0
(2)
在建模过程中,乘客随机进入排队区的时间间隔由伪随机数生成器产生。伪随机数序列在种子数较大的条件下具有随机数序列的统计特征,而且可在多次仿真中重复出现,有利于进行不同条件下系统仿真的比较研究。
在有驱动、制动配置条件下,乘骑车辆在特定位置处可按预先设定的速度运行;在无驱动、制动配置的条件下,乘骑设备的速度分布与轨道形状直接相关。在此条件下,乘骑车辆的速度按照下式估算:
(3)
式中,V1为乘骑车辆在位置1处的速度;V2为乘骑车辆在位置2处的速度;g为重力加速度;ΔH为位置2相对于位置1的高度差;ds为位置2相对于位置1的距离;f为滚动摩擦因数。
当前,尚无成熟的专业软件专门用于电影乐园或类似娱乐项目的仿真建模。通过分析电影乐园乘骑系统运行的特点,认为面向离散事件系统仿真的工具软件Flexsim经过二次开发,可作为电影乐园乘骑系统交通控制模型的基础平台。Flexsim软件集系统仿真、可视化及数据处理技术于一体,主要面向制造、物流等领域的仿真建模。在Flexsim平台上,采用事件表推进机制,可以模拟游客随机进入乐园、等车、上车、下车及乘骑设备到站、离站等离散事件。基于时间表推进机制,可以模拟乘骑车辆的连续运动。通过集成电影乐园内各对象交互的离散模型及乘骑车辆运行的连续模型,形成模拟电影乐园乘骑交通控制的混合动态系统模型。Flexsim软件中的主要模块及工具均以物流应用为背景,在建模过程中,乘骑车辆的轨道由工具箱中的“传送带”改造而成,乘骑车辆由工具箱中的“物流运输车辆”改造而成,游客由工具箱中的“物品”改造而成。通过上述改造,可以建立乘骑系统的三维模型。Flexsim软件具有强大的数据统计输出功能,可对多次仿真运行的结果进行统计分析,可在此基础上完成蒙特卡洛仿真及系统参数优化。
应用Flexsim软件建立的电影乐园乘骑交通系统的三维可视化仿真模型如图4所示。由于实际项目中的乘骑车辆是在轨道车辆底盘上加装可载人的座舱或动感平台构成的,所以,在乘骑车辆建模过程中,将Flexsim组件库中的“物流运输车辆”与“搬运机械臂”结合,组成实际项目中的乘骑车辆模型。该模型可将整个系统的运行显示在三维环境中,其优势在于可以更真实地展现整个乘骑系统运行的全部场景,便于分析研究及参数优化。

图4 电影乘骑系统可视化仿真模型
应用Flexsim软件可以开发可视化仿真模型的控制面板。在该控制面板上,可设置仿真速度、观察视角和观察区域,可输入乘骑系统的配置参数,如车辆数量、载客人数和发车时间间隔等。仿真结果可同时按数值和曲线等2种形式输出。
4 仿真实例
以上述可视化模型为仿真平台,导入乘骑设备的轨道。仿真初始条件设置为:共9列乘骑车辆,每列含4辆车;发车间隔为40s;乘客等待区容量为750人。进入电影乐园的游客流服从泊松分布,按高峰时间入园人数为1 500人/h计,游客平均到达时间间隔设置为2.4s。
游客接待量、乘骑车辆满载率和游客平均等车时间等指标是电影乐园乘骑系统最为重要的技术经济指标,也是衡量系统服务水平的重要参数。在乘骑系统启动至运行8min的过程中,游客平均等车时间的变化如图5所示,由图5可以看出,乘骑系统运行至稳态后,游客平均等车时间接近110s。在乘骑系统启动至运行90min的过程中,排队区等候总人数的变化如图6所示,由图6可以看出,乘骑系统运行至稳态后,排队区等候的总游客数量≤200人。

图5 游客平均等车时间的变化曲线

图6 排队区等候总人数的变化曲线
乘骑车辆的数量、车辆的连接方式等设备配置参数,以及发车间隔时间等运行管理参数对于乘骑系统的运行性能有显著的影响。通过仿真运行并整理输出结果,在排队区容量为200人,游客到达的平均时间间隔为2s的条件下,分别采用9列车及5列车,系统运行1h后,乘骑系统的游客接待量及平均等车时间见表1。
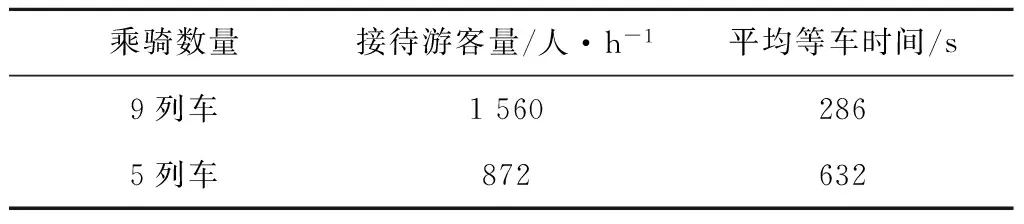
表1 乘骑数量对服务水平的影响分析表
由表1的结果可知,在相同的条件下,采用9列乘骑车辆,1h游客接待量>1 500人,游客平均等待时间<5min,因而服务水平较高;若采用5列车,1h游客接待量为872人,无法满足系统游客接待量的设计要求。
仿真结果表明,游客排队区的容量可在原750人的基础上减至200人。基于多轮可视化仿真,并通过进一步验证乘骑车辆间的安全距离,最终确定乘骑系统中列车的数量为8列,发车间隔为38s,相应的游客接待量为1 515人/h。
5 结语
电影乐园乘骑系统本质上是一种特殊的无人驾驶运输系统。乘骑交通控制系统对于乘骑系统乃至整个电影乐园的运行至关重要。建立乘骑系统的交通控制仿真模型,可以预先验证乘骑系统配置的合理性。本文分析了电影乐园乘骑交通控制系统的工作原理、控制流程和通信机制等,通过对Flexsim仿真平台的二次开发,建立了电影乐园乘骑交通控制系统的可视化仿真模型。通过对电影乐园乘骑系统的模拟运行,验证了乘骑系统配置的可行性及合理性,并对乘骑系统及整个电影乐园基础设施的配置参数进行了优化。
[1] 方捷新,张雪. 车动电影应用新技术以提升沉浸感和用户体验质量[J]. 现代电影技术,2014(7):10-12.
[2] 梁朝虎,沈勇,丁克勤. 过山车动态仿真建模方法研究[J]. 系统仿真学报,2006(8):280-282.
[3] 李军,苑士华. 车辆动力学仿真的可信度评估方法研究[J]. 北京理工大学学报,2015(1):44-47.
[4] 李惠光,张占领,邵暖,等. 基于图像视觉伺服的AGV动力学控制[J]. 控制工程,2012(1):56-59.
[5] 葛显龙,王旭,邢乐斌. 动态需求的多车型车辆调度问题及云遗传算法[J].系统工程学报,2012(6):823-832.
[6] 李妍峰,李军,高自友. 动态规划启发式算法求解时变车辆调度问题[J].系统工程理论与实践,2012(8):1712-1718.
责任编辑 郑练
Research on Modeling and Simulation of the Movie Park Ride System Traffic Control
WANG Fenghui1, GAO Yanhe2
(1.Wanda Cultural Tourism Planning & Research Institute, Amusement Equipment Research Institute, Beijing 100022, China;2.School of English Education, Xi’an International Studies University, Xi’an 710128, China)
The ride system of the movie theme park has the characteristic of vehicles running with complex and changeable states. The safety of the vehicle operation has to be ensured. We have developed the visual simulation platform to simulate the operation of the ride fully and realistically at an early design stage. Then optimize the key parameters of the ride. Based on the model of the ride traffic control system of the movie park, the visual simulation platform uses the advantage of discrete event system modeling taken by Flexsim software. The simulation platform can show the panorama and detail of the ride system operation and record, and analyze the operation parameters of the ride system. This simulation platform can not only meet the requirement on the interactive simulation, but also optimize the parameters of the ride system, so it can be used as the basic tool for the preliminary design of the movie park ride system.
movie park, ride system, traffic control, visual simulation
TP 39
A
王锋辉(1978-),男,博士研究生,主要从事无人机飞行动力学与控制、无人驾驶车辆的运动控制与协作、机器人技术在娱乐领域的应用等方面的研究。
2016-08-16